 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmark for Out-of-Distribution Detection in Deep Reinforcement Learning
Dec 05, 2021
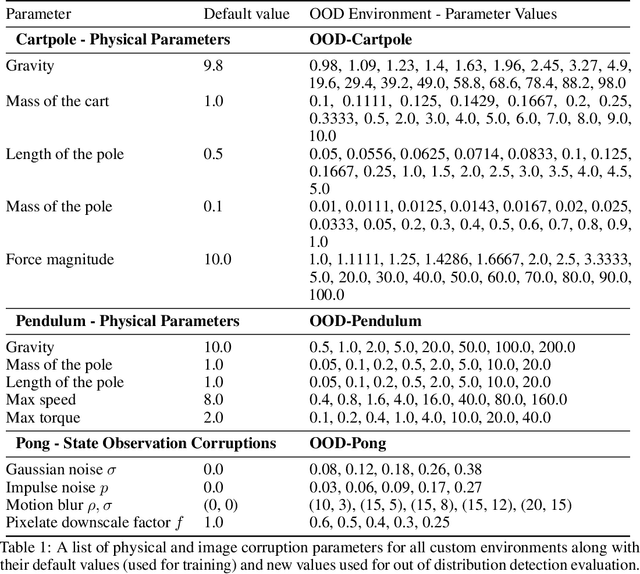
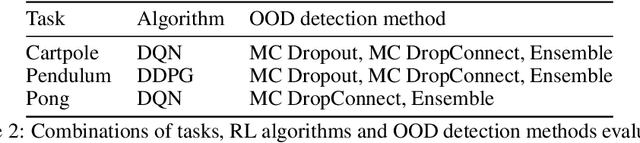
Reinforcement Learning (RL) based solutions are being adopted in a variety of domains including robotics, health care and industrial automation. Most focus is given to when these solutions work well, but they fail when presented with out of distribution inputs. RL policies share the same faults as most machine learning models. Out of distribution detection for RL is generally not well covered in the literature, and there is a lack of benchmarks for this task. In this work we propose a benchmark to evaluate OOD detection methods in a Reinforcement Learning setting, by modifying the physical parameters of non-visual standard environments or corrupting the state observation for visual environments. We discuss ways to generate custom RL environments that can produce OOD data, and evaluate three uncertainty methods for the OOD detection task. Our results show that ensemble methods have the best OOD detection performance with a lower standard deviation across multiple environments.
Can Reinforcement Learning for Continuous Control Generalize Across Physics Engines?
Oct 27, 2020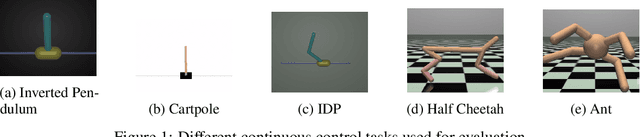
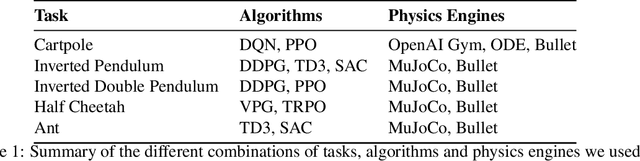
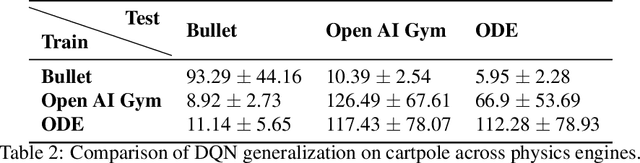
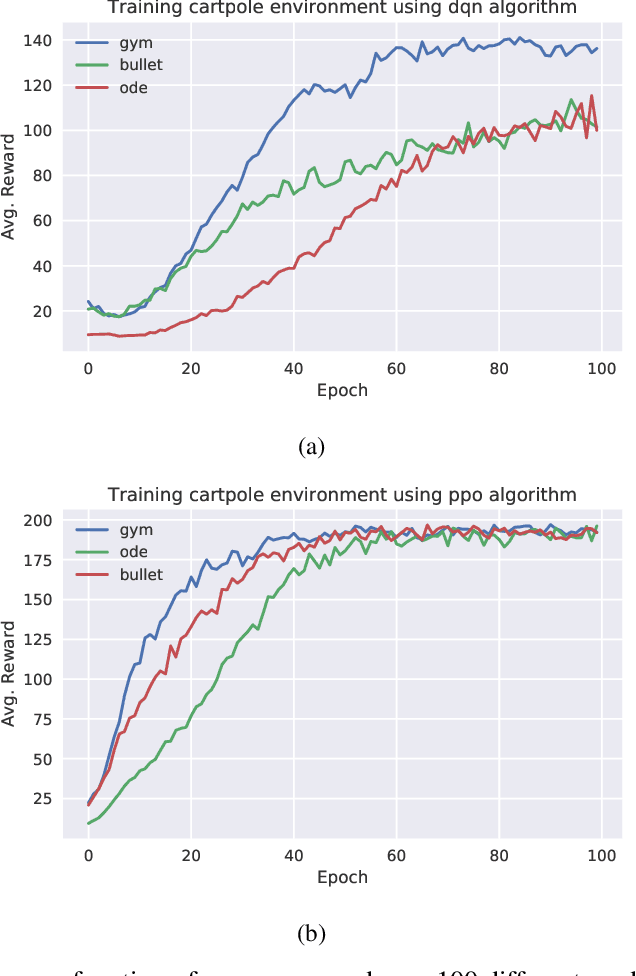
Reinforcement learning (RL) algorithms should learn as much as possible about the environment but not the properties of the physics engines that generate the environment. There are multiple algorithms that solve the task in a physics engine based environment but there is no work done so far to understand if the RL algorithms can generalize across physics engines. In this work, we compare the generalization performance of various deep reinforcement learning algorithms on a variety of control tasks. Our results show that MuJoCo is the best engine to transfer the learning to other engines. On the other hand, none of the algorithms generalize when trained on PyBullet. We also found out that various algorithms have a promising generalizability if the effect of random seeds can be minimized on their performance.