 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree as a Bird: Event-based Dynamic Sense-and-Avoid for Ornithopter Robot Flight
Oct 15, 2023Autonomous flight of flapping-wing robots is a major challenge for robot perception. Most of the previous sense-and-avoid works have studied the problem of obstacle avoidance for flapping-wing robots considering only static obstacles. This paper presents a fully onboard dynamic sense-and-avoid scheme for large-scale ornithopters using event cameras. These sensors trigger pixel information due to changes of illumination in the scene such as those produced by dynamic objects. The method performs event-by-event processing in low-cost hardware such as those onboard small aerial vehicles. The proposed scheme detects obstacles and evaluates possible collisions with the robot body. The onboard controller actuates over the horizontal and vertical tail deflections to execute the avoidance maneuver. The scheme is validated in both indoor and outdoor scenarios using obstacles of different shapes and sizes. To the best of the authors' knowledge, this is the first event-based method for dynamic obstacle avoidance in a flapping-wing robot.
* 8 pages, 10 figures, Journal paper. For associated video, see "this http URL" https://www.youtube.com/watch?v=cBMcw5jRnfU&list=PL-Kzs2T7Hx3K-IDKsgUwPUnzHmk8Pcsek
The GRIFFIN Perception Dataset: Bridging the Gap Between Flapping-Wing Flight and Robotic Perception
Feb 18, 2021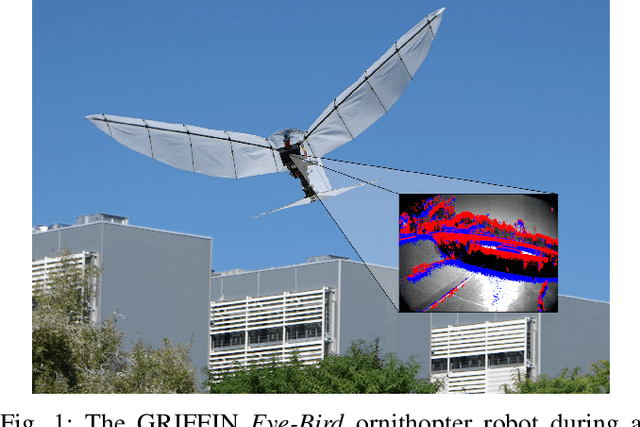
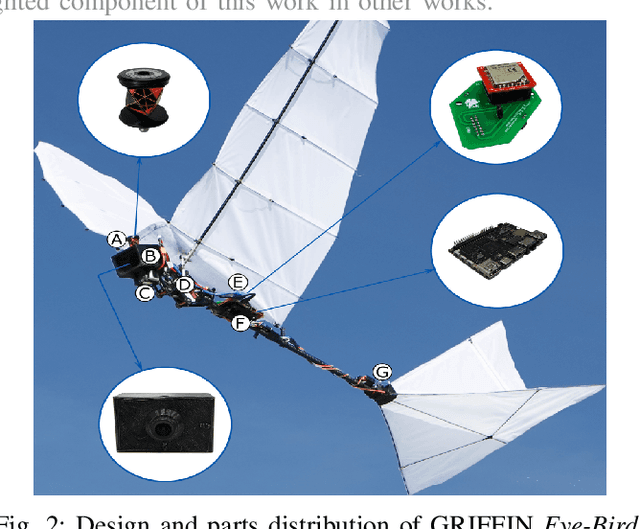
The development of automatic perception systems and techniques for bio-inspired flapping-wing robots is severely hampered by the high technical complexity of these platforms and the installation of onboard sensors and electronics. Besides, flapping-wing robot perception suffers from high vibration levels and abrupt movements during flight, which cause motion blur and strong changes in lighting conditions. This paper presents a perception dataset for bird-scale flapping-wing robots as a tool to help alleviate the aforementioned problems. The presented data include measurements from onboard sensors widely used in aerial robotics and suitable to deal with the perception challenges of flapping-wing robots, such as an event camera, a conventional camera, and two Inertial Measurement Units (IMUs), as well as ground truth measurements from a laser tracker or a motion capture system. A total of 21 datasets of different types of flights were collected in three different scenarios (one indoor and two outdoor). To the best of the authors' knowledge this is the first dataset for flapping-wing robot perception.
* 8 pages, 22 figures, Video: "this https URL https://www.youtube.com/watch?v=ymCRnlWxX24&t=35s"
A framework for synchronizing a team of aerial robots in communication-limited environments
Feb 13, 2019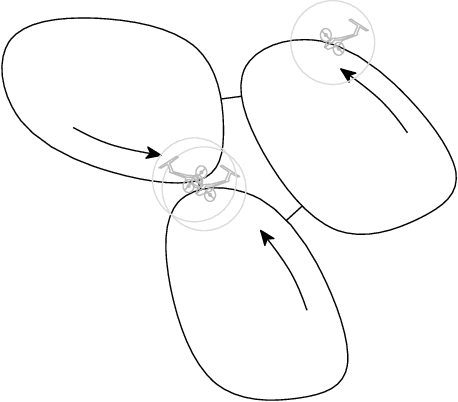
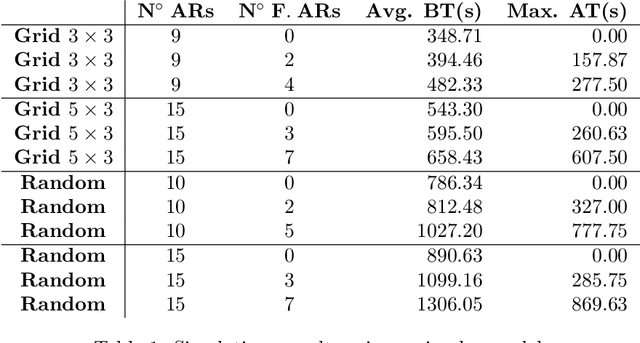
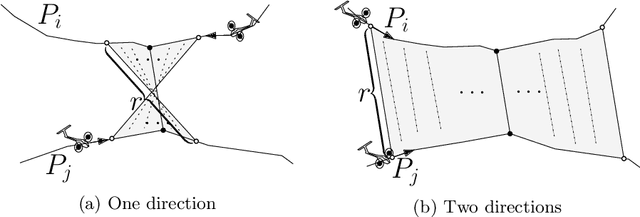
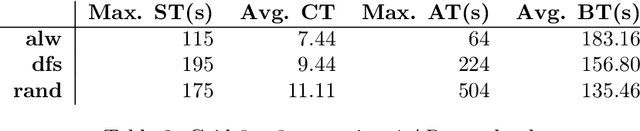
This paper addresses a synchronization problem that arises when a team of aerial robots (ARs) need to communicate while performing assigned tasks in a cooperative scenario. Each robot has a limited communication range and flies within a previously assigned closed trajectory. When two robots are close enough, a communication link may be established, allowing the robots to exchange information. The goal is to schedule the flights such that the entire system can be synchronized for maximum information exchange, that is, every pair of neighbors always visit the feasible communication link at the same time. We propose an algorithm for scheduling a team of robots in this scenario and propose a robust framework in which the synchronization of a large team of robots is assured. The approach allows us to design a fault-tolerant system that can be used for multiple tasks such as surveillance, area exploration, searching for targets in a hazardous environment, and assembly and structure construction, to name a few.