 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
SceNeRFlow: Time-Consistent Reconstruction of General Dynamic Scenes
Aug 16, 2023
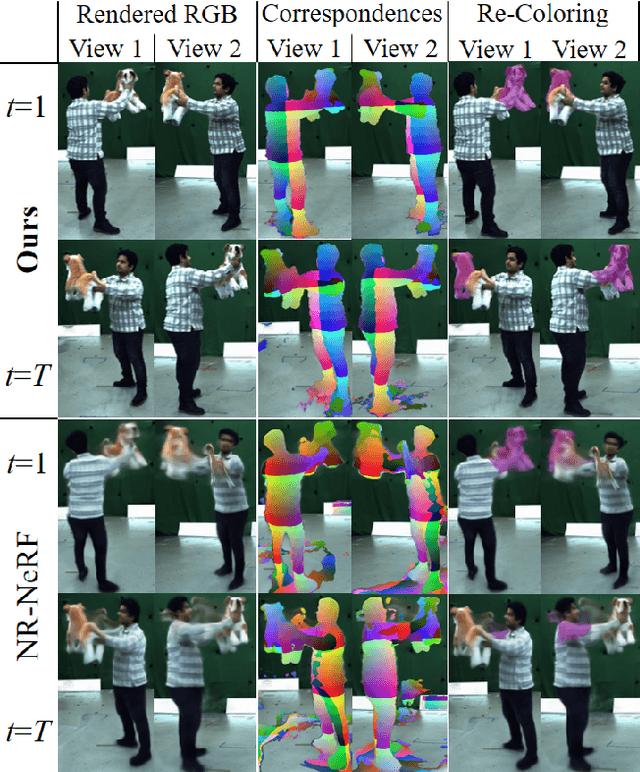
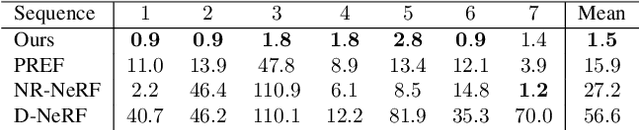
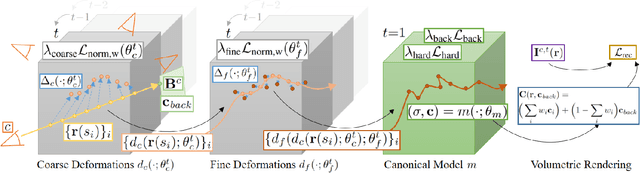
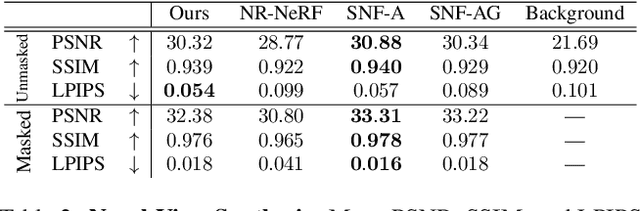
Existing methods for the 4D reconstruction of general, non-rigidly deforming objects focus on novel-view synthesis and neglect correspondences. However, time consistency enables advanced downstream tasks like 3D editing, motion analysis, or virtual-asset creation. We propose SceNeRFlow to reconstruct a general, non-rigid scene in a time-consistent manner. Our dynamic-NeRF method takes multi-view RGB videos and background images from static cameras with known camera parameters as input. It then reconstructs the deformations of an estimated canonical model of the geometry and appearance in an online fashion. Since this canonical model is time-invariant, we obtain correspondences even for long-term, long-range motions. We employ neural scene representations to parametrize the components of our method. Like prior dynamic-NeRF methods, we use a backwards deformation model. We find non-trivial adaptations of this model necessary to handle larger motions: We decompose the deformations into a strongly regularized coarse component and a weakly regularized fine component, where the coarse component also extends the deformation field into the space surrounding the object, which enables tracking over time. We show experimentally that, unlike prior work that only handles small motion, our method enables the reconstruction of studio-scale motions.
Powerset multi-class cross entropy loss for neural speaker diarization
Oct 19, 2023Since its introduction in 2019, the whole end-to-end neural diarization (EEND) line of work has been addressing speaker diarization as a frame-wise multi-label classification problem with permutation-invariant training. Despite EEND showing great promise, a few recent works took a step back and studied the possible combination of (local) supervised EEND diarization with (global) unsupervised clustering. Yet, these hybrid contributions did not question the original multi-label formulation. We propose to switch from multi-label (where any two speakers can be active at the same time) to powerset multi-class classification (where dedicated classes are assigned to pairs of overlapping speakers). Through extensive experiments on 9 different benchmarks, we show that this formulation leads to significantly better performance (mostly on overlapping speech) and robustness to domain mismatch, while eliminating the detection threshold hyperparameter, critical for the multi-label formulation.
Object-Aware Impedance Control for Human-Robot Collaborative Task with Online Object Parameter Estimation
Oct 19, 2023Physical human-robot interactions (pHRIs) can improve robot autonomy and reduce physical demands on humans. In this paper, we consider a collaborative task with a considerably long object and no prior knowledge of the object's parameters. An integrated control framework with an online object parameter estimator and a Cartesian object-aware impedance controller is proposed to realize complicated scenarios. During the transportation task, the object parameters are estimated online while a robot and human lift an object. The perturbation motion is incorporated into the null space of the desired trajectory to enhance the estimator accuracy. An object-aware impedance controller is designed using the real-time estimation results to effectively transmit the intended human motion to the robot through the object. Experimental demonstrations of collaborative tasks, including object transportation and assembly tasks, are implemented to show the effectiveness of our proposed method.
Predict the Future from the Past? On the Temporal Data Distribution Shift in Financial Sentiment Classifications
Oct 19, 2023Temporal data distribution shift is prevalent in the financial text. How can a financial sentiment analysis system be trained in a volatile market environment that can accurately infer sentiment and be robust to temporal data distribution shifts? In this paper, we conduct an empirical study on the financial sentiment analysis system under temporal data distribution shifts using a real-world financial social media dataset that spans three years. We find that the fine-tuned models suffer from general performance degradation in the presence of temporal distribution shifts. Furthermore, motivated by the unique temporal nature of the financial text, we propose a novel method that combines out-of-distribution detection with time series modeling for temporal financial sentiment analysis. Experimental results show that the proposed method enhances the model's capability to adapt to evolving temporal shifts in a volatile financial market.
Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
Oct 15, 2023The hybrid nature of multi-contact robotic systems, due to making and breaking contact with the environment, creates significant challenges for high-quality control. Existing model-based methods typically rely on either good prior knowledge of the multi-contact model or require significant offline model tuning effort, thus resulting in low adaptability and robustness. In this paper, we propose a real-time adaptive multi-contact model predictive control framework, which enables online adaption of the hybrid multi-contact model and continuous improvement of the control performance for contact-rich tasks. This framework includes an adaption module, which continuously learns a residual of the hybrid model to minimize the gap between the prior model and reality, and a real-time multi-contact MPC controller. We demonstrated the effectiveness of the framework in synthetic examples, and applied it on hardware to solve contact-rich manipulation tasks, where a robot uses its end-effector to roll different unknown objects on a table to track given paths. The hardware experiments show that with a rough prior model, the multi-contact MPC controller adapts itself on-the-fly with an adaption rate around 20 Hz and successfully manipulates previously unknown objects with non-smooth surface geometries.
Conditional Diffusion Model for Target Speaker Extraction
Oct 07, 2023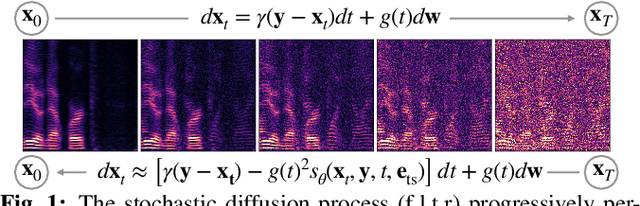
We propose DiffSpEx, a generative target speaker extraction method based on score-based generative modelling through stochastic differential equations. DiffSpEx deploys a continuous-time stochastic diffusion process in the complex short-time Fourier transform domain, starting from the target speaker source and converging to a Gaussian distribution centred on the mixture of sources. For the reverse-time process, a parametrised score function is conditioned on a target speaker embedding to extract the target speaker from the mixture of sources. We utilise ECAPA-TDNN target speaker embeddings and condition the score function alternately on the SDE time embedding and the target speaker embedding. The potential of DiffSpEx is demonstrated with the WSJ0-2mix dataset, achieving an SI-SDR of 12.9 dB and a NISQA score of 3.56. Moreover, we show that fine-tuning a pre-trained DiffSpEx model to a specific speaker further improves performance, enabling personalisation in target speaker extraction.
Optimizing Layerwise Polynomial Approximation for Efficient Private Inference on Fully Homomorphic Encryption: A Dynamic Programming Approach
Oct 16, 2023Recent research has explored the implementation of privacy-preserving deep neural networks solely using fully homomorphic encryption. However, its practicality has been limited because of prolonged inference times. When using a pre-trained model without retraining, a major factor contributing to these prolonged inference times is the high-degree polynomial approximation of activation functions such as the ReLU function. The high-degree approximation consumes a substantial amount of homomorphic computational resources, resulting in slower inference. Unlike the previous works approximating activation functions uniformly and conservatively, this paper presents a \emph{layerwise} degree optimization of activation functions to aggressively reduce the inference time while maintaining classification accuracy by taking into account the characteristics of each layer. Instead of the minimax approximation commonly used in state-of-the-art private inference models, we employ the weighted least squares approximation method with the input distributions of activation functions. Then, we obtain the layerwise optimized degrees for activation functions through the \emph{dynamic programming} algorithm, considering how each layer's approximation error affects the classification accuracy of the deep neural network. Furthermore, we propose modulating the ciphertext moduli-chain layerwise to reduce the inference time. By these proposed layerwise optimization methods, we can reduce inference times for the ResNet-20 model and the ResNet-32 model by 3.44 times and 3.16 times, respectively, in comparison to the prior implementations employing uniform degree polynomials and a consistent ciphertext modulus.
Fast Parameter Inference on Pulsar Timing Arrays with Normalizing Flows
Oct 18, 2023Pulsar timing arrays (PTAs) perform Bayesian posterior inference with expensive MCMC methods. Given a dataset of ~10-100 pulsars and O(10^3) timing residuals each, producing a posterior distribution for the stochastic gravitational wave background (SGWB) can take days to a week. The computational bottleneck arises because the likelihood evaluation required for MCMC is extremely costly when considering the dimensionality of the search space. Fortunately, generating simulated data is fast, so modern simulation-based inference techniques can be brought to bear on the problem. In this paper, we demonstrate how conditional normalizing flows trained on simulated data can be used for extremely fast and accurate estimation of the SGWB posteriors, reducing the sampling time from weeks to a matter of seconds.
Visual Tracking Nonlinear Model Predictive Control Method for Autonomous Wind Turbine Inspection
Oct 21, 2023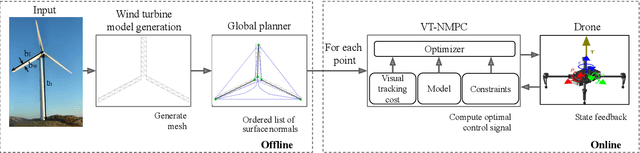
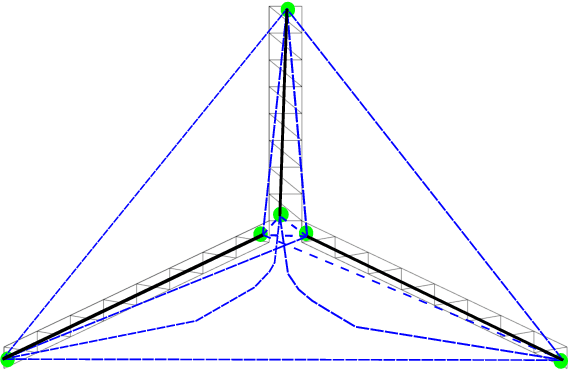
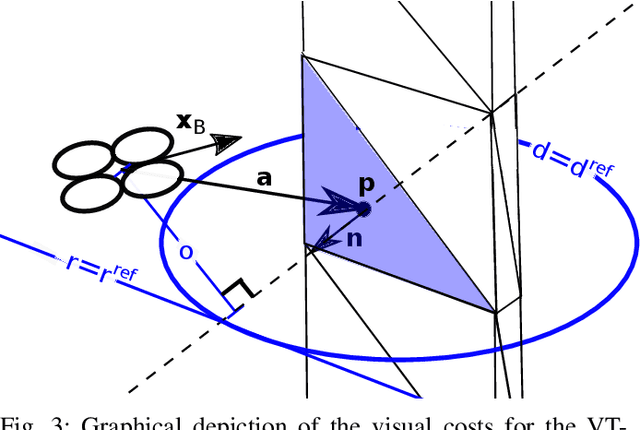
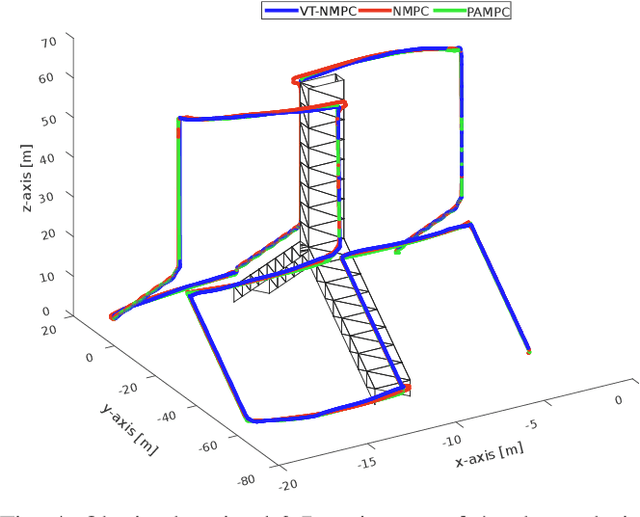
Automated visual inspection of on-and offshore wind turbines using aerial robots provides several benefits, namely, a safe working environment by circumventing the need for workers to be suspended high above the ground, reduced inspection time, preventive maintenance, and access to hard-to-reach areas. A novel nonlinear model predictive control (NMPC) framework alongside a global wind turbine path planner is proposed to achieve distance-optimal coverage for wind turbine inspection. Unlike traditional MPC formulations, visual tracking NMPC (VT-NMPC) is designed to track an inspection surface, instead of a position and heading trajectory, thereby circumventing the need to provide an accurate predefined trajectory for the drone. An additional capability of the proposed VT-NMPC method is that by incorporating inspection requirements as visual tracking costs to minimize, it naturally achieves the inspection task successfully while respecting the physical constraints of the drone. Multiple simulation runs and real-world tests demonstrate the efficiency and efficacy of the proposed automated inspection framework, which outperforms the traditional MPC designs, by providing full coverage of the target wind turbine blades as well as its robustness to changing wind conditions. The implementation codes are open-sourced.
COVIDFakeExplainer: An Explainable Machine Learning based Web Application for Detecting COVID-19 Fake News
Oct 21, 2023Fake news has emerged as a critical global issue, magnified by the COVID-19 pandemic, underscoring the need for effective preventive tools. Leveraging machine learning, including deep learning techniques, offers promise in combatting fake news. This paper goes beyond by establishing BERT as the superior model for fake news detection and demonstrates its utility as a tool to empower the general populace. We have implemented a browser extension, enhanced with explainability features, enabling real-time identification of fake news and delivering easily interpretable explanations. To achieve this, we have employed two publicly available datasets and created seven distinct data configurations to evaluate three prominent machine learning architectures. Our comprehensive experiments affirm BERT's exceptional accuracy in detecting COVID-19-related fake news. Furthermore, we have integrated an explainability component into the BERT model and deployed it as a service through Amazon's cloud API hosting (AWS). We have developed a browser extension that interfaces with the API, allowing users to select and transmit data from web pages, receiving an intelligible classification in return. This paper presents a practical end-to-end solution, highlighting the feasibility of constructing a holistic system for fake news detection, which can significantly benefit society.