 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Federated Learning of Large Language Models with Parameter-Efficient Prompt Tuning and Adaptive Optimization
Oct 23, 2023
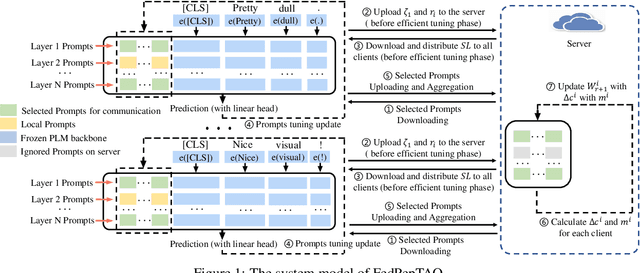
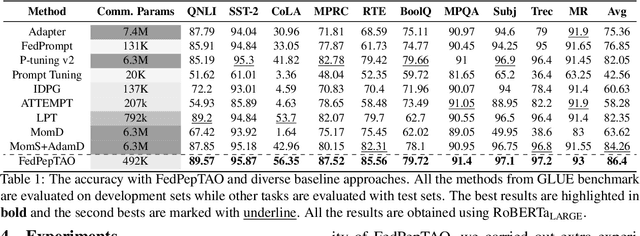
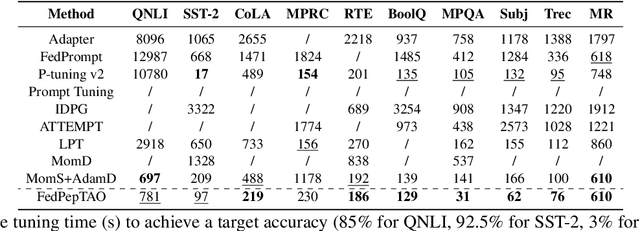
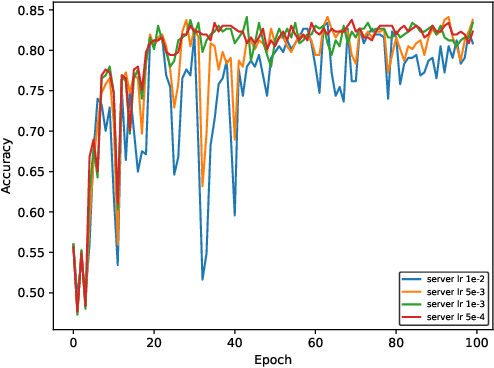
Federated learning (FL) is a promising paradigm to enable collaborative model training with decentralized data. However, the training process of Large Language Models (LLMs) generally incurs the update of significant parameters, which limits the applicability of FL techniques to tackle the LLMs in real scenarios. Prompt tuning can significantly reduce the number of parameters to update, but it either incurs performance degradation or low training efficiency. The straightforward utilization of prompt tuning in the FL often raises non-trivial communication costs and dramatically degrades performance. In addition, the decentralized data is generally non-Independent and Identically Distributed (non-IID), which brings client drift problems and thus poor performance. This paper proposes a Parameter-efficient prompt Tuning approach with Adaptive Optimization, i.e., FedPepTAO, to enable efficient and effective FL of LLMs. First, an efficient partial prompt tuning approach is proposed to improve performance and efficiency simultaneously. Second, a novel adaptive optimization method is developed to address the client drift problems on both the device and server sides to enhance performance further. Extensive experiments based on 10 datasets demonstrate the superb performance (up to 60.8\% in terms of accuracy) and efficiency (up to 97.59\% in terms of training time) of FedPepTAO compared with 9 baseline approaches. Our code is available at https://github.com/llm-eff/FedPepTAO.
DREAM+: Efficient Dataset Distillation by Bidirectional Representative Matching
Oct 23, 2023Dataset distillation plays a crucial role in creating compact datasets with similar training performance compared with original large-scale ones. This is essential for addressing the challenges of data storage and training costs. Prevalent methods facilitate knowledge transfer by matching the gradients, embedding distributions, or training trajectories of synthetic images with those of the sampled original images. Although there are various matching objectives, currently the strategy for selecting original images is limited to naive random sampling. We argue that random sampling overlooks the evenness of the selected sample distribution, which may result in noisy or biased matching targets. Besides, the sample diversity is also not constrained by random sampling. Additionally, current methods predominantly focus on single-dimensional matching, where information is not fully utilized. To address these challenges, we propose a novel matching strategy called Dataset Distillation by Bidirectional REpresentAtive Matching (DREAM+), which selects representative original images for bidirectional matching. DREAM+ is applicable to a variety of mainstream dataset distillation frameworks and significantly reduces the number of distillation iterations by more than 15 times without affecting performance. Given sufficient training time, DREAM+ can further improve the performance and achieve state-of-the-art results. We have released the code at github.com/NUS-HPC-AI-Lab/DREAM+.
Making RL with Preference-based Feedback Efficient via Randomization
Oct 23, 2023Reinforcement Learning algorithms that learn from human feedback (RLHF) need to be efficient in terms of statistical complexity, computational complexity, and query complexity. In this work, we consider the RLHF setting where the feedback is given in the format of preferences over pairs of trajectories. In the linear MDP model, by using randomization in algorithm design, we present an algorithm that is sample efficient (i.e., has near-optimal worst-case regret bounds) and has polynomial running time (i.e., computational complexity is polynomial with respect to relevant parameters). Our algorithm further minimizes the query complexity through a novel randomized active learning procedure. In particular, our algorithm demonstrates a near-optimal tradeoff between the regret bound and the query complexity. To extend the results to more general nonlinear function approximation, we design a model-based randomized algorithm inspired by the idea of Thompson sampling. Our algorithm minimizes Bayesian regret bound and query complexity, again achieving a near-optimal tradeoff between these two quantities. Computation-wise, similar to the prior Thompson sampling algorithms under the regular RL setting, the main computation primitives of our algorithm are Bayesian supervised learning oracles which have been heavily investigated on the empirical side when applying Thompson sampling algorithms to RL benchmark problems.
VQ-NeRF: Vector Quantization Enhances Implicit Neural Representations
Oct 23, 2023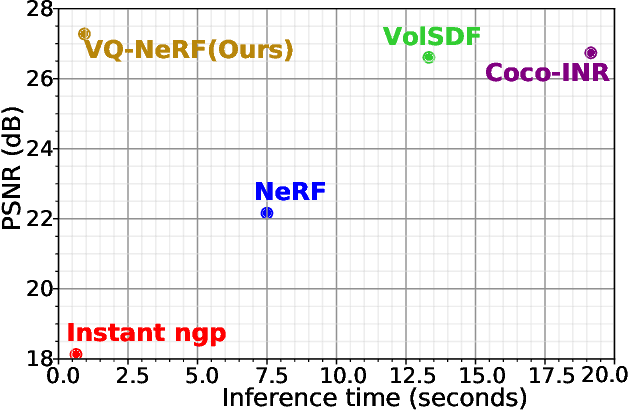

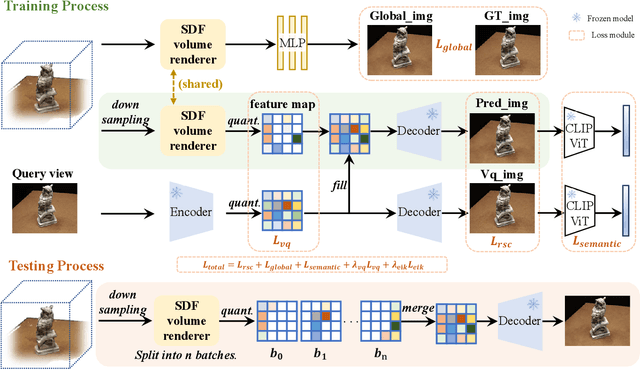
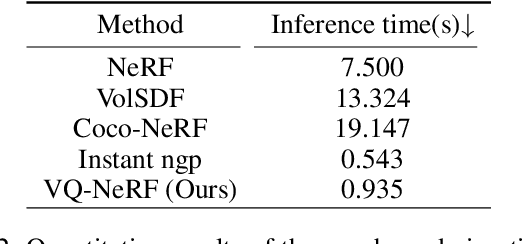
Recent advancements in implicit neural representations have contributed to high-fidelity surface reconstruction and photorealistic novel view synthesis. However, the computational complexity inherent in these methodologies presents a substantial impediment, constraining the attainable frame rates and resolutions in practical applications. In response to this predicament, we propose VQ-NeRF, an effective and efficient pipeline for enhancing implicit neural representations via vector quantization. The essence of our method involves reducing the sampling space of NeRF to a lower resolution and subsequently reinstating it to the original size utilizing a pre-trained VAE decoder, thereby effectively mitigating the sampling time bottleneck encountered during rendering. Although the codebook furnishes representative features, reconstructing fine texture details of the scene remains challenging due to high compression rates. To overcome this constraint, we design an innovative multi-scale NeRF sampling scheme that concurrently optimizes the NeRF model at both compressed and original scales to enhance the network's ability to preserve fine details. Furthermore, we incorporate a semantic loss function to improve the geometric fidelity and semantic coherence of our 3D reconstructions. Extensive experiments demonstrate the effectiveness of our model in achieving the optimal trade-off between rendering quality and efficiency. Evaluation on the DTU, BlendMVS, and H3DS datasets confirms the superior performance of our approach.
The WHY in Business Processes: Discovery of Causal Execution Dependencies
Oct 23, 2023A crucial element in predicting the outcomes of process interventions and making informed decisions about the process is unraveling the genuine relationships between the execution of process activities. Contemporary process discovery algorithms exploit time precedence as their main source of model derivation. Such reliance can sometimes be deceiving from a causal perspective. This calls for faithful new techniques to discover the true execution dependencies among the tasks in the process. To this end, our work offers a systematic approach to the unveiling of the true causal business process by leveraging an existing causal discovery algorithm over activity timing. In addition, this work delves into a set of conditions under which process mining discovery algorithms generate a model that is incongruent with the causal business process model, and shows how the latter model can be methodologically employed for a sound analysis of the process. Our methodology searches for such discrepancies between the two models in the context of three causal patterns, and derives a new view in which these inconsistencies are annotated over the mined process model. We demonstrate our methodology employing two open process mining algorithms, the IBM Process Mining tool, and the LiNGAM causal discovery technique. We apply it on a synthesized dataset and on two open benchmark data sets.
Segment, Select, Correct: A Framework for Weakly-Supervised Referring Segmentation
Oct 23, 2023Referring Image Segmentation (RIS) - the problem of identifying objects in images through natural language sentences - is a challenging task currently mostly solved through supervised learning. However, while collecting referred annotation masks is a time-consuming process, the few existing weakly-supervised and zero-shot approaches fall significantly short in performance compared to fully-supervised learning ones. To bridge the performance gap without mask annotations, we propose a novel weakly-supervised framework that tackles RIS by decomposing it into three steps: obtaining instance masks for the object mentioned in the referencing instruction (segment), using zero-shot learning to select a potentially correct mask for the given instruction (select), and bootstrapping a model which allows for fixing the mistakes of zero-shot selection (correct). In our experiments, using only the first two steps (zero-shot segment and select) outperforms other zero-shot baselines by as much as 19%, while our full method improves upon this much stronger baseline and sets the new state-of-the-art for weakly-supervised RIS, reducing the gap between the weakly-supervised and fully-supervised methods in some cases from around 33% to as little as 14%. Code is available at https://github.com/fgirbal/segment-select-correct.
CAwa-NeRF: Instant Learning of Compression-Aware NeRF Features
Oct 23, 2023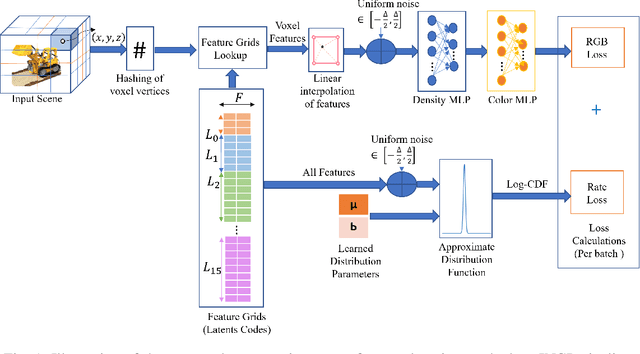
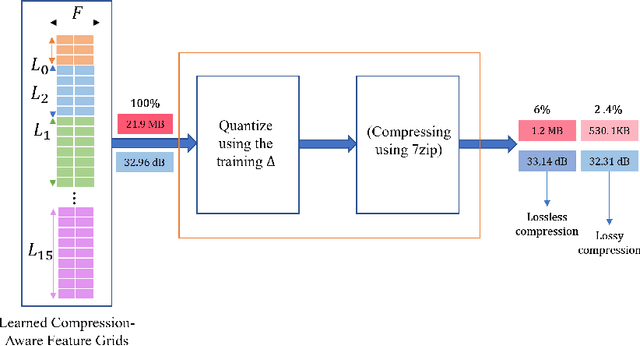
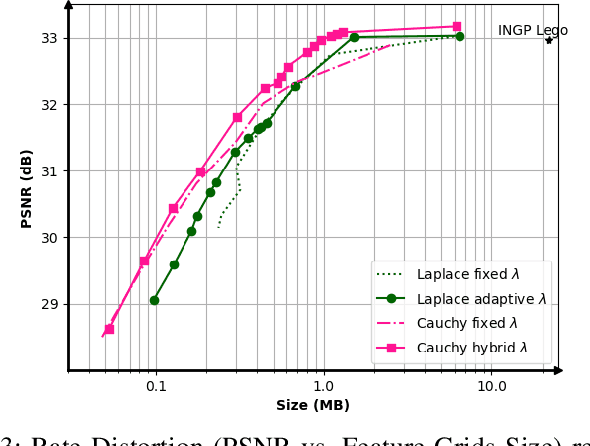
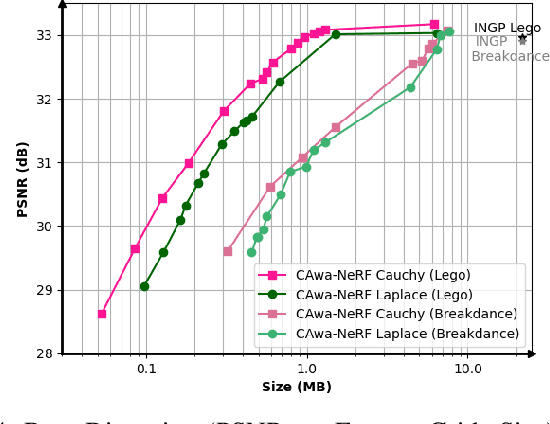
Modeling 3D scenes by volumetric feature grids is one of the promising directions of neural approximations to improve Neural Radiance Fields (NeRF). Instant-NGP (INGP) introduced multi-resolution hash encoding from a lookup table of trainable feature grids which enabled learning high-quality neural graphics primitives in a matter of seconds. However, this improvement came at the cost of higher storage size. In this paper, we address this challenge by introducing instant learning of compression-aware NeRF features (CAwa-NeRF), that allows exporting the zip compressed feature grids at the end of the model training with a negligible extra time overhead without changing neither the storage architecture nor the parameters used in the original INGP paper. Nonetheless, the proposed method is not limited to INGP but could also be adapted to any model. By means of extensive simulations, our proposed instant learning pipeline can achieve impressive results on different kinds of static scenes such as single object masked background scenes and real-life scenes captured in our studio. In particular, for single object masked background scenes CAwa-NeRF compresses the feature grids down to 6% (1.2 MB) of the original size without any loss in the PSNR (33 dB) or down to 2.4% (0.53 MB) with a slight virtual loss (32.31 dB).
Making informed decisions in cutting tool maintenance in milling: A KNN based model agnostic approach
Oct 23, 2023In machining processes, monitoring the condition of the tool is a crucial aspect to ensure high productivity and quality of the product. Using different machine learning techniques in Tool Condition Monitoring TCM enables a better analysis of the large amount of data of different signals acquired during the machining processes. The real time force signals encountered during the process were acquired by performing numerous experiments. Different tool wear conditions were considered during the experimentation. A comprehensive statistical analysis of the data and feature selection using decision trees was conducted, and the KNN algorithm was used to perform classification. Hyperparameter tuning of the model was done to improve the models performance. Much research has been done to employ machine learning approaches in tool condition monitoring systems, however, a model agnostic approach to increase the interpretability of the process and get an in depth understanding of how the decision making is done is not implemented by many. This research paper presents a KNN based white box model, which allows us to dive deep into how the model performs the classification and how it prioritizes the different features included. This approach helps in detecting why the tool is in a certain condition and allows the manufacturer to make an informed decision about the tools maintenance.
Object Pose Estimation Annotation Pipeline for Multi-view Monocular Camera Systems in Industrial Settings
Oct 23, 2023Object localization, and more specifically object pose estimation, in large industrial spaces such as warehouses and production facilities, is essential for material flow operations. Traditional approaches rely on artificial artifacts installed in the environment or excessively expensive equipment, that is not suitable at scale. A more practical approach is to utilize existing cameras in such spaces in order to address the underlying pose estimation problem and to localize objects of interest. In order to leverage state-of-the-art methods in deep learning for object pose estimation, large amounts of data need to be collected and annotated. In this work, we provide an approach to the annotation of large datasets of monocular images without the need for manual labor. Our approach localizes cameras in space, unifies their location with a motion capture system, and uses a set of linear mappings to project 3D models of objects of interest at their ground truth 6D pose locations. We test our pipeline on a custom dataset collected from a system of eight cameras in an industrial setting that mimics the intended area of operation. Our approach was able to provide consistent quality annotations for our dataset with 26, 482 object instances at a fraction of the time required by human annotators.
Interaction-Driven Active 3D Reconstruction with Object Interiors
Oct 23, 2023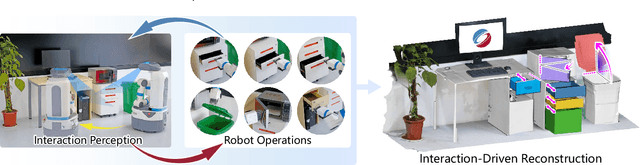
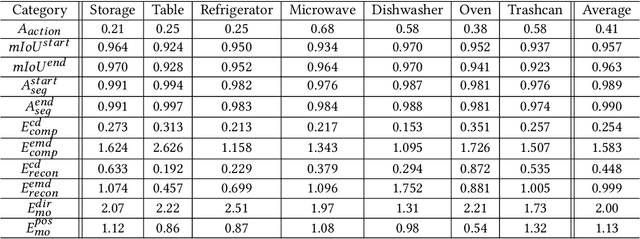
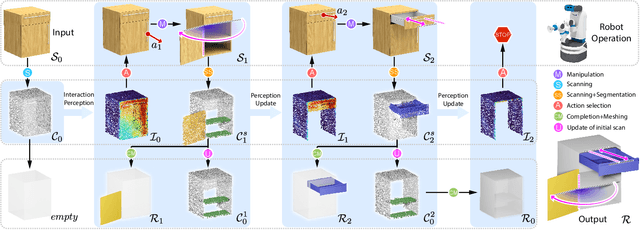
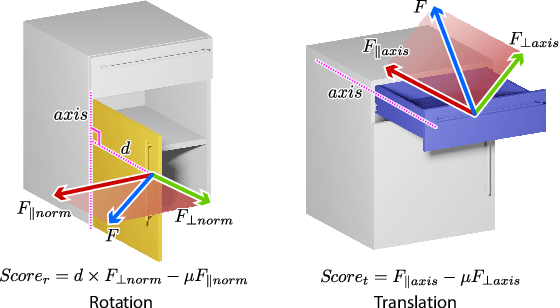
We introduce an active 3D reconstruction method which integrates visual perception, robot-object interaction, and 3D scanning to recover both the exterior and interior, i.e., unexposed, geometries of a target 3D object. Unlike other works in active vision which focus on optimizing camera viewpoints to better investigate the environment, the primary feature of our reconstruction is an analysis of the interactability of various parts of the target object and the ensuing part manipulation by a robot to enable scanning of occluded regions. As a result, an understanding of part articulations of the target object is obtained on top of complete geometry acquisition. Our method operates fully automatically by a Fetch robot with built-in RGBD sensors. It iterates between interaction analysis and interaction-driven reconstruction, scanning and reconstructing detected moveable parts one at a time, where both the articulated part detection and mesh reconstruction are carried out by neural networks. In the final step, all the remaining, non-articulated parts, including all the interior structures that had been exposed by prior part manipulations and subsequently scanned, are reconstructed to complete the acquisition. We demonstrate the performance of our method via qualitative and quantitative evaluation, ablation studies, comparisons to alternatives, as well as experiments in a real environment.