 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Robust NOMA-assisted OTFS-ISAC Network Design with 3D Motion Prediction Topology
Oct 21, 2023
This paper proposes a novel non-orthogonal multiple access (NOMA)-assisted orthogonal time-frequency space (OTFS)-integrated sensing and communication (ISAC) network, which uses unmanned aerial vehicles (UAVs) as air base stations to support multiple users. By employing ISAC, the UAV extracts position and velocity information from the user's echo signals, and non-orthogonal power allocation is conducted to achieve a superior achievable rate. A 3D motion prediction topology is used to guide the NOMA transmission for multiple users, and a robust power allocation solution is proposed under perfect and imperfect channel estimation for Maxi-min Fairness (MMF) and Maximum sum-Rate (SR) problems. Simulation results demonstrate the superiority of the proposed NOMA-assisted OTFS-ISAC system over other systems in terms of achievable rate under both perfect and imperfect channel conditions with the aid of 3D motion prediction topology.
OBSUM: An object-based spatial unmixing model for spatiotemporal fusion of remote sensing images
Oct 14, 2023Spatiotemporal fusion aims to improve both the spatial and temporal resolution of remote sensing images, thus facilitating time-series analysis at a fine spatial scale. However, there are several important issues that limit the application of current spatiotemporal fusion methods. First, most spatiotemporal fusion methods are based on pixel-level computation, which neglects the valuable object-level information of the land surface. Moreover, many existing methods cannot accurately retrieve strong temporal changes between the available high-resolution image at base date and the predicted one. This study proposes an Object-Based Spatial Unmixing Model (OBSUM), which incorporates object-based image analysis and spatial unmixing, to overcome the two abovementioned problems. OBSUM consists of one preprocessing step and three fusion steps, i.e., object-level unmixing, object-level residual compensation, and pixel-level residual compensation. OBSUM can be applied using only one fine image at the base date and one coarse image at the prediction date, without the need of a coarse image at the base date. The performance of OBSUM was compared with five representative spatiotemporal fusion methods. The experimental results demonstrated that OBSUM outperformed other methods in terms of both accuracy indices and visual effects over time-series. Furthermore, OBSUM also achieved satisfactory results in two typical remote sensing applications. Therefore, it has great potential to generate accurate and high-resolution time-series observations for supporting various remote sensing applications.
Open-Ended Instructable Embodied Agents with Memory-Augmented Large Language Models
Oct 23, 2023Pre-trained and frozen LLMs can effectively map simple scene re-arrangement instructions to programs over a robot's visuomotor functions through appropriate few-shot example prompting. To parse open-domain natural language and adapt to a user's idiosyncratic procedures, not known during prompt engineering time, fixed prompts fall short. In this paper, we introduce HELPER, an embodied agent equipped with an external memory of language-program pairs that parses free-form human-robot dialogue into action programs through retrieval-augmented LLM prompting: relevant memories are retrieved based on the current dialogue, instruction, correction or VLM description, and used as in-context prompt examples for LLM querying. The memory is expanded during deployment to include pairs of user's language and action plans, to assist future inferences and personalize them to the user's language and routines. HELPER sets a new state-of-the-art in the TEACh benchmark in both Execution from Dialog History (EDH) and Trajectory from Dialogue (TfD), with 1.7x improvement over the previous SOTA for TfD. Our models, code and video results can be found in our project's website: https://helper-agent-llm.github.io.
Applications of ML-Based Surrogates in Bayesian Approaches to Inverse Problems
Oct 23, 2023Neural networks have become a powerful tool as surrogate models to provide numerical solutions for scientific problems with increased computational efficiency. This efficiency can be advantageous for numerically challenging problems where time to solution is important or when evaluation of many similar analysis scenarios is required. One particular area of scientific interest is the setting of inverse problems, where one knows the forward dynamics of a system are described by a partial differential equation and the task is to infer properties of the system given (potentially noisy) observations of these dynamics. We consider the inverse problem of inferring the location of a wave source on a square domain, given a noisy solution to the 2-D acoustic wave equation. Under the assumption of Gaussian noise, a likelihood function for source location can be formulated, which requires one forward simulation of the system per evaluation. Using a standard neural network as a surrogate model makes it computationally feasible to evaluate this likelihood several times, and so Markov Chain Monte Carlo methods can be used to evaluate the posterior distribution of the source location. We demonstrate that this method can accurately infer source-locations from noisy data.
Robot-Assisted Navigation for Visually Impaired through Adaptive Impedance and Path Planning
Oct 23, 2023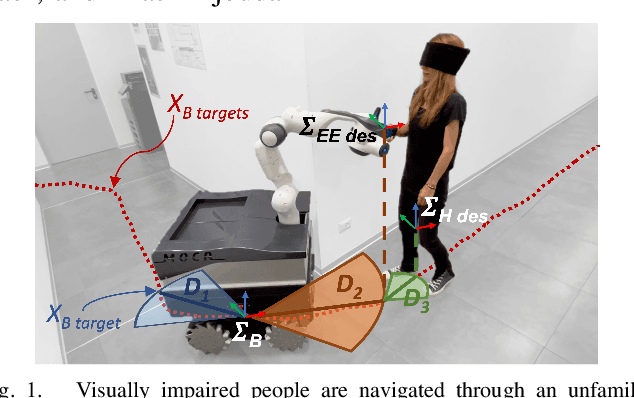
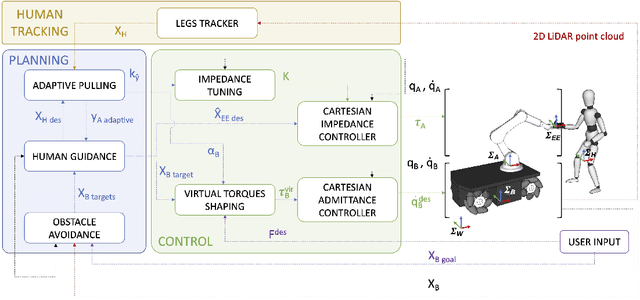
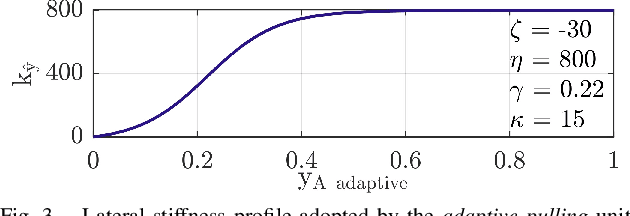
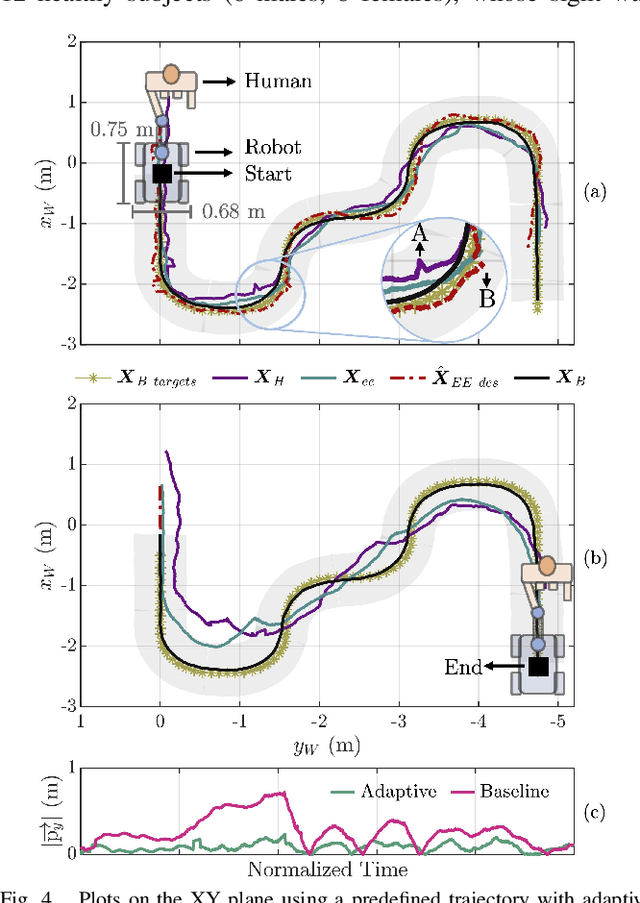
This paper presents a framework to navigate visually impaired people through unfamiliar environments by means of a mobile manipulator. The Human-Robot system consists of three key components: a mobile base, a robotic arm, and the human subject who gets guided by the robotic arm via physically coupling their hand with the cobot's end-effector. These components, receiving a goal from the user, traverse a collision-free set of waypoints in a coordinated manner, while avoiding static and dynamic obstacles through an obstacle avoidance unit and a novel human guidance planner. With this aim, we also present a legs tracking algorithm that utilizes 2D LiDAR sensors integrated into the mobile base to monitor the human pose. Additionally, we introduce an adaptive pulling planner responsible for guiding the individual back to the intended path if they veer off course. This is achieved by establishing a target arm end-effector position and dynamically adjusting the impedance parameters in real-time through a impedance tuning unit. To validate the framework we present a set of experiments both in laboratory settings with 12 healthy blindfolded subjects and a proof-of-concept demonstration in a real-world scenario.
Design and Implementation of an RSSI-Based Bluetooth Low Energy Indoor Localization System
Oct 23, 2023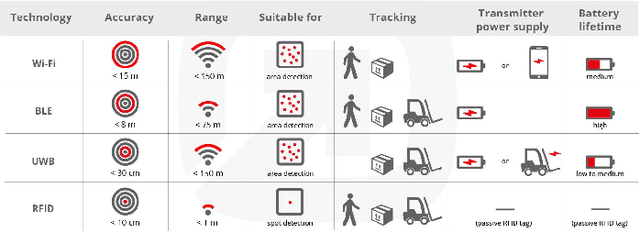
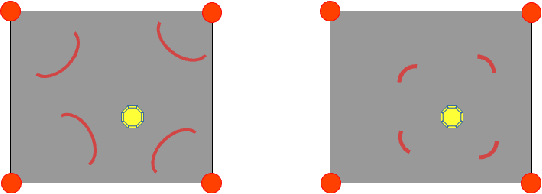
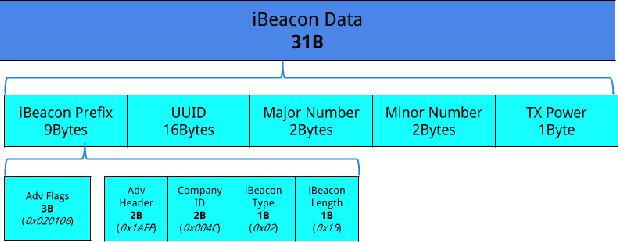
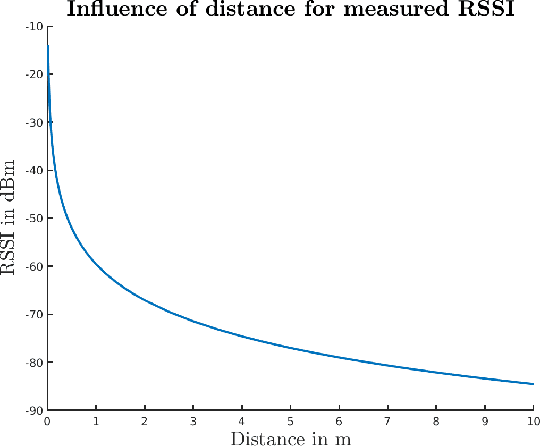
Indoor Positioning System (IPS) is a crucial technology that enables medical staff and hospital managements to accurately locate and track persons or assets inside the medical buildings. Among other technologies, Bluetooth Low Energy (BLE) can be exploited for achieving an energy-efficient and low-cost solution. This work presents the design and implementation of an received signal strength indicator (RSSI)-based indoor localization system. The paper shows the implementation of a low complex weighted k-Nearest Neighbors algorithm that processes raw RSSI data from connection-less iBeacon's. The designed hardware and firmware are implemented around the low-power and low-cost nRF52832 from Nordic Semiconductor. Experimental evaluation with the real-time data processing has been evaluated and presented in a 7.2 m by 7.2 m room with furniture and 5 beacon nodes. The experimental results show an average error of only 0.72 m in realistic conditions. Finally, the overall power consumption of the fixed beacon with a periodic advertisement of 100 ms is only 50 uA at 3 V, which leads to a long-lasting solution of over one year with a 500 mAh coin battery.
One-hot Generalized Linear Model for Switching Brain State Discovery
Oct 23, 2023Exposing meaningful and interpretable neural interactions is critical to understanding neural circuits. Inferred neural interactions from neural signals primarily reflect functional interactions. In a long experiment, subject animals may experience different stages defined by the experiment, stimuli, or behavioral states, and hence functional interactions can change over time. To model dynamically changing functional interactions, prior work employs state-switching generalized linear models with hidden Markov models (i.e., HMM-GLMs). However, we argue they lack biological plausibility, as functional interactions are shaped and confined by the underlying anatomical connectome. Here, we propose a novel prior-informed state-switching GLM. We introduce both a Gaussian prior and a one-hot prior over the GLM in each state. The priors are learnable. We will show that the learned prior should capture the state-constant interaction, shedding light on the underlying anatomical connectome and revealing more likely physical neuron interactions. The state-dependent interaction modeled by each GLM offers traceability to capture functional variations across multiple brain states. Our methods effectively recover true interaction structures in simulated data, achieve the highest predictive likelihood with real neural datasets, and render interaction structures and hidden states more interpretable when applied to real neural data.
DeCrisisMB: Debiased Semi-Supervised Learning for Crisis Tweet Classification via Memory Bank
Oct 23, 2023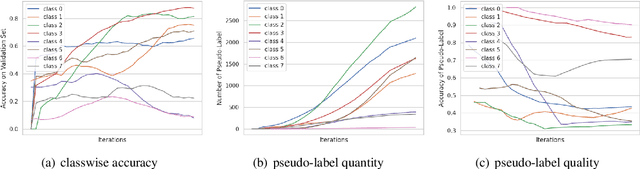
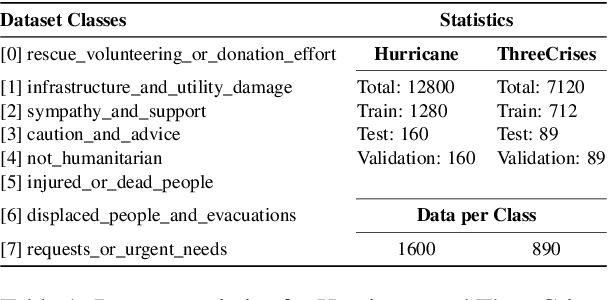
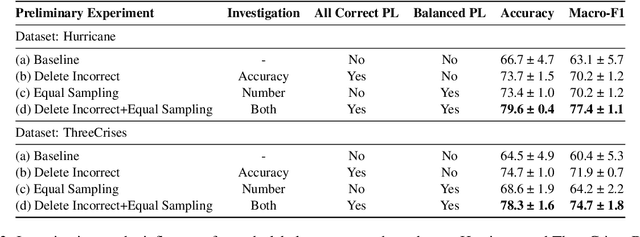
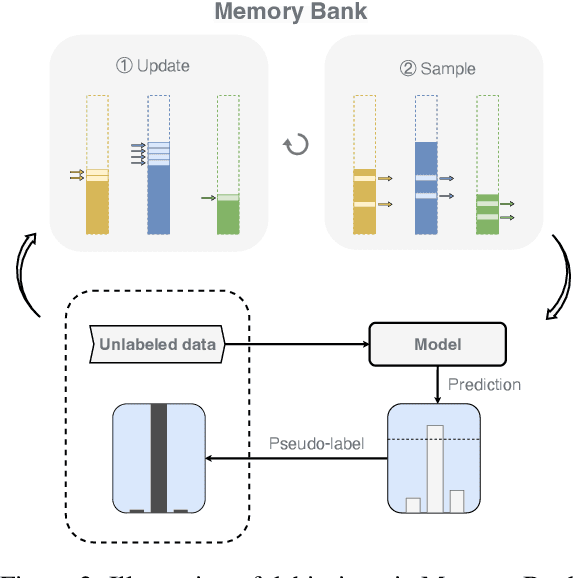
During crisis events, people often use social media platforms such as Twitter to disseminate information about the situation, warnings, advice, and support. Emergency relief organizations leverage such information to acquire timely crisis circumstances and expedite rescue operations. While existing works utilize such information to build models for crisis event analysis, fully-supervised approaches require annotating vast amounts of data and are impractical due to limited response time. On the other hand, semi-supervised models can be biased, performing moderately well for certain classes while performing extremely poorly for others, resulting in substantially negative effects on disaster monitoring and rescue. In this paper, we first study two recent debiasing methods on semi-supervised crisis tweet classification. Then we propose a simple but effective debiasing method, DeCrisisMB, that utilizes a Memory Bank to store and perform equal sampling for generated pseudo-labels from each class at each training iteration. Extensive experiments are conducted to compare different debiasing methods' performance and generalization ability in both in-distribution and out-of-distribution settings. The results demonstrate the superior performance of our proposed method. Our code is available at https://github.com/HenryPengZou/DeCrisisMB.
We are Who We Cite: Bridges of Influence Between Natural Language Processing and Other Academic Fields
Oct 23, 2023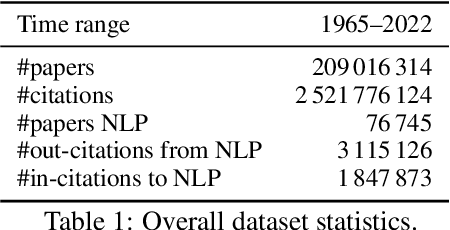
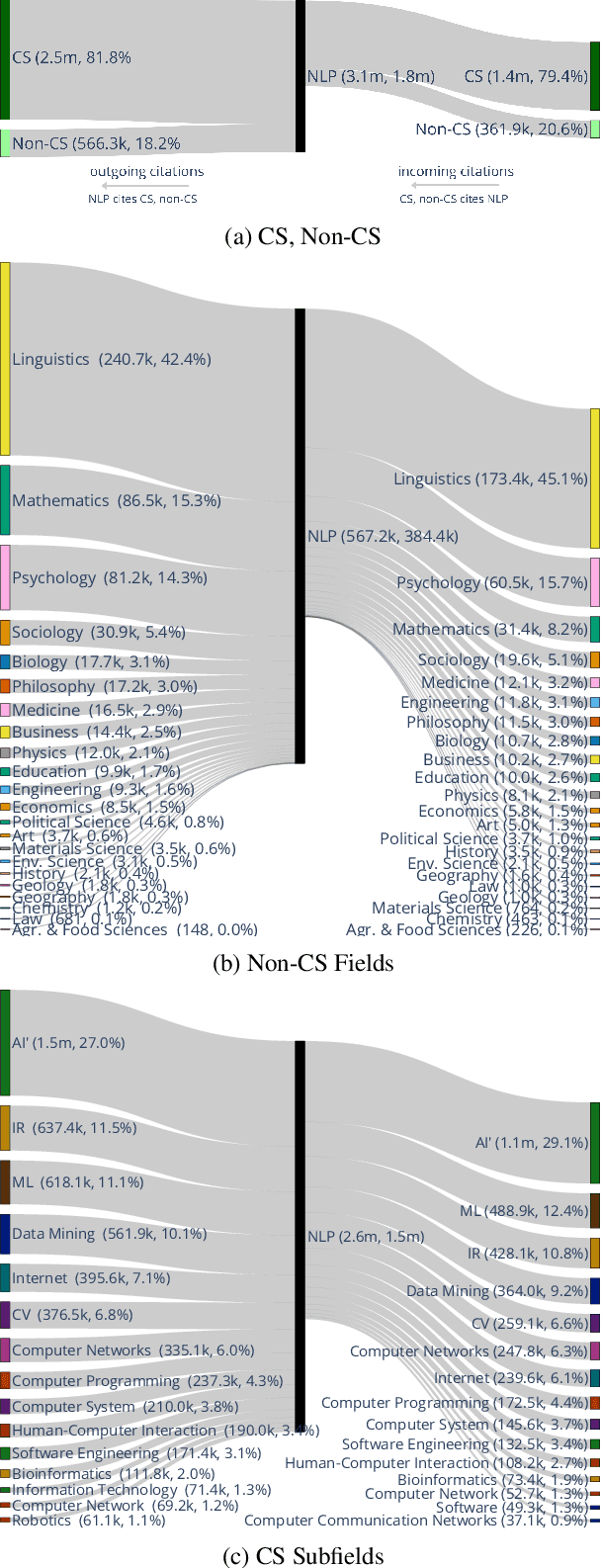
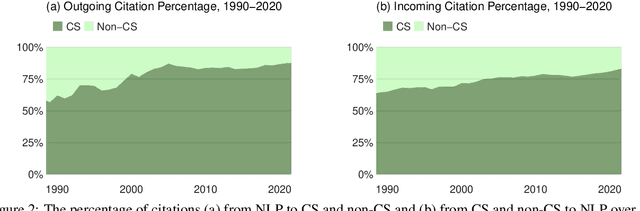
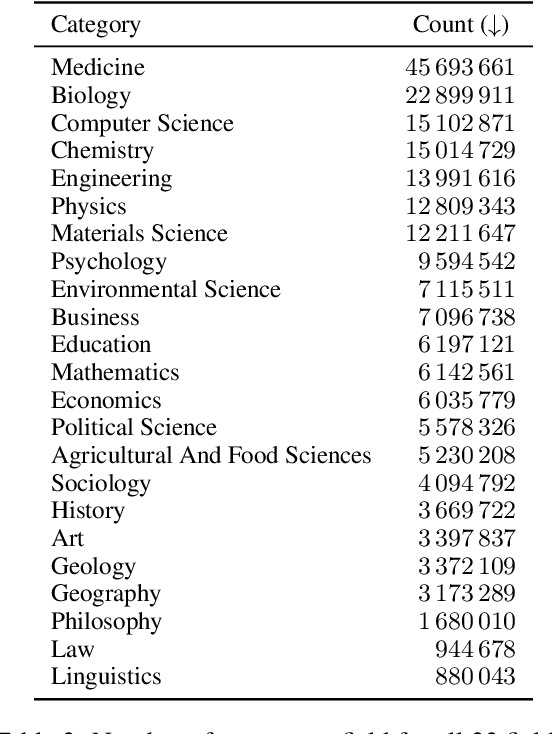
Natural Language Processing (NLP) is poised to substantially influence the world. However, significant progress comes hand-in-hand with substantial risks. Addressing them requires broad engagement with various fields of study. Yet, little empirical work examines the state of such engagement (past or current). In this paper, we quantify the degree of influence between 23 fields of study and NLP (on each other). We analyzed ~77k NLP papers, ~3.1m citations from NLP papers to other papers, and ~1.8m citations from other papers to NLP papers. We show that, unlike most fields, the cross-field engagement of NLP, measured by our proposed Citation Field Diversity Index (CFDI), has declined from 0.58 in 1980 to 0.31 in 2022 (an all-time low). In addition, we find that NLP has grown more insular -- citing increasingly more NLP papers and having fewer papers that act as bridges between fields. NLP citations are dominated by computer science; Less than 8% of NLP citations are to linguistics, and less than 3% are to math and psychology. These findings underscore NLP's urgent need to reflect on its engagement with various fields.
Underwater Sound Speed Profile Construction: A Review
Oct 12, 2023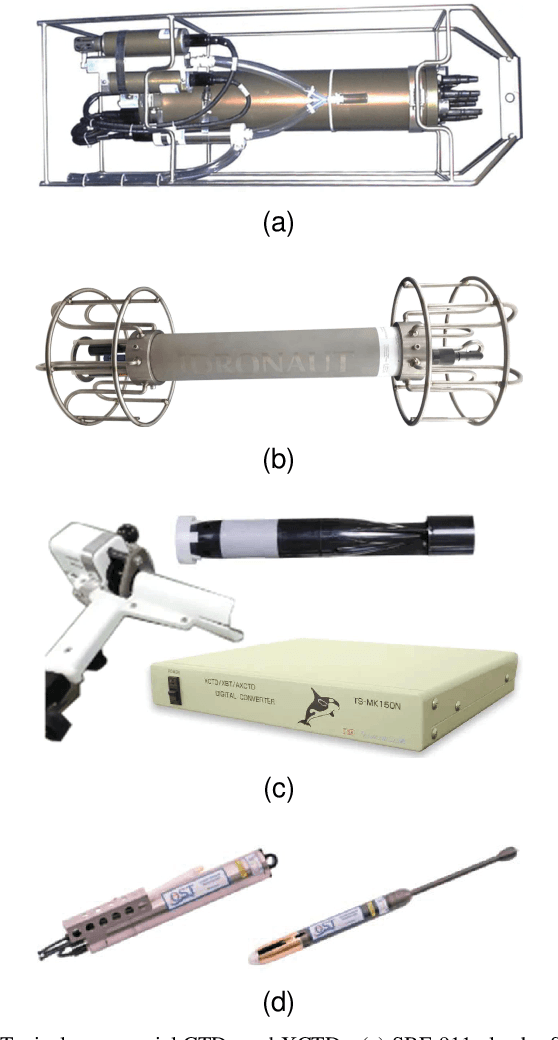
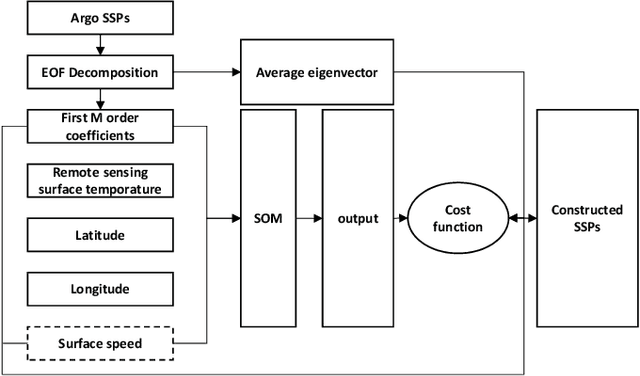

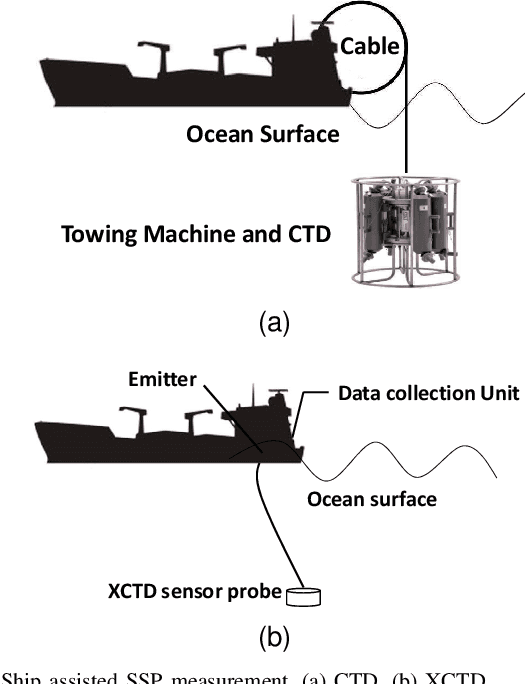
Real--time and accurate construction of regional sound speed profiles (SSP) is important for building underwater positioning, navigation, and timing (PNT) systems as it greatly affect the signal propagation modes such as trajectory. In this paper, we summarizes and analyzes the current research status in the field of underwater SSP construction, and the mainstream methods include direct SSP measurement and SSP inversion. In the direct measurement method, we compare the performance of popular international commercial temperature, conductivity, and depth profilers (CTD). While for the inversion methods, the framework and basic principles of matched field processing (MFP), compressive sensing (CS), and deep learning (DL) for constructing SSP are introduced, and their advantages and disadvantages are compared. The traditional direct measurement method has good accuracy performance, but it usually takes a long time. The proposal of SSP inversion method greatly improves the convenience and real--time performance, but the accuracy is not as good as the direct measurement method. Currently, the SSP inversion relies on sonar observation data, making it difficult to apply to areas that couldn't be covered by underwater observation systems, and these methods are unable to predict the distribution of sound velocity at future times. How to comprehensively utilize multi-source data and provide elastic sound velocity distribution estimation services with different accuracy and real-time requirements for underwater users without sonar observation data is the mainstream trend in future research on SSP construction.