 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Low-cost Strategic Monitoring Approach for Scalable and Interpretable Error Detection in Deep Neural Networks
Oct 31, 2023
We present a highly compact run-time monitoring approach for deep computer vision networks that extracts selected knowledge from only a few (down to merely two) hidden layers, yet can efficiently detect silent data corruption originating from both hardware memory and input faults. Building on the insight that critical faults typically manifest as peak or bulk shifts in the activation distribution of the affected network layers, we use strategically placed quantile markers to make accurate estimates about the anomaly of the current inference as a whole. Importantly, the detector component itself is kept algorithmically transparent to render the categorization of regular and abnormal behavior interpretable to a human. Our technique achieves up to ~96% precision and ~98% recall of detection. Compared to state-of-the-art anomaly detection techniques, this approach requires minimal compute overhead (as little as 0.3% with respect to non-supervised inference time) and contributes to the explainability of the model.
Quantum Neural Networks for Power Flow Analysis
Nov 04, 2023This paper explores the potential application of quantum and hybrid quantum-classical neural networks in power flow analysis. Experiments are conducted using two small-size datasets based on the IEEE 4-bus and 33-bus test systems. A systematic performance comparison is also conducted among quantum, hybrid quantum-classical, and classical neural networks. The comparison is based on (i) generalization ability, (ii) robustness, (iii) training dataset size needed, (iv) training error. (v) training computational time, and (vi) training process stability. The results show that the developed quantum-classical neural network outperforms both quantum and classical neural networks, and hence can improve deep learning-based power flow analysis in the noisy-intermediate-scale quantum (NISQ) era.
Deep Learning Architecture for Network-Efficiency at the Edge
Nov 09, 2023The growing number of AI-driven applications in the mobile devices has led to solutions that integrate deep learning models with the available edge-cloud resources; due to multiple benefits such as reduction in on-device energy consumption, improved latency, improved network usage, and certain privacy improvements, split learning, where deep learning models are split away from the mobile device and computed in a distributed manner, has become an extensively explored topic. Combined with compression-aware methods where learning adapts to compression of communicated data, the benefits of this approach have further improved and could serve as an alternative to established approaches like federated learning methods. In this work, we develop an adaptive compression-aware split learning method ('deprune') to improve and train deep learning models so that they are much more network-efficient (use less network resources and are faster), which would make them ideal to deploy in weaker devices with the help of edge-cloud resources. This method is also extended ('prune') to very quickly train deep learning models, through a transfer learning approach, that trades off little accuracy for much more network-efficient inference abilities. We show that the 'deprune' method can reduce network usage by 4x when compared with a split-learning approach (that does not use our method) without loss of accuracy, while also improving accuracy over compression-aware split-learning by 4 percent. Lastly, we show that the 'prune' method can reduce the training time for certain models by up to 6x without affecting the accuracy when compared against a compression-aware split-learning approach.
Rethinking Residual Connection in Training Large-Scale Spiking Neural Networks
Nov 09, 2023Spiking Neural Network (SNN) is known as the most famous brain-inspired model, but the non-differentiable spiking mechanism makes it hard to train large-scale SNNs. To facilitate the training of large-scale SNNs, many training methods are borrowed from Artificial Neural Networks (ANNs), among which deep residual learning is the most commonly used. But the unique features of SNNs make prior intuition built upon ANNs not available for SNNs. Although there are a few studies that have made some pioneer attempts on the topology of Spiking ResNet, the advantages of different connections remain unclear. To tackle this issue, we analyze the merits and limitations of various residual connections and empirically demonstrate our ideas with extensive experiments. Then, based on our observations, we abstract the best-performing connections into densely additive (DA) connection, extend such a concept to other topologies, and propose four architectures for training large-scale SNNs, termed DANet, which brings up to 13.24% accuracy gain on ImageNet. Besides, in order to present a detailed methodology for designing the topology of large-scale SNNs, we further conduct in-depth discussions on their applicable scenarios in terms of their performance on various scales of datasets and demonstrate their advantages over prior architectures. At a low training expense, our best-performing ResNet-50/101/152 obtain 73.71%/76.13%/77.22% top-1 accuracy on ImageNet with 4 time steps. We believe that this work shall give more insights for future works to design the topology of their networks and promote the development of large-scale SNNs. The code will be publicly available.
FMViT: A multiple-frequency mixing Vision Transformer
Nov 09, 2023The transformer model has gained widespread adoption in computer vision tasks in recent times. However, due to the quadratic time and memory complexity of self-attention, which is proportional to the number of input tokens, most existing Vision Transformers (ViTs) encounter challenges in achieving efficient performance in practical industrial deployment scenarios, such as TensorRT and CoreML, where traditional CNNs excel. Although some recent attempts have been made to design CNN-Transformer hybrid architectures to tackle this problem, their overall performance has not met expectations. To tackle these challenges, we propose an efficient hybrid ViT architecture named FMViT. This approach enhances the model's expressive power by blending high-frequency features and low-frequency features with varying frequencies, enabling it to capture both local and global information effectively. Additionally, we introduce deploy-friendly mechanisms such as Convolutional Multigroup Reparameterization (gMLP), Lightweight Multi-head Self-Attention (RLMHSA), and Convolutional Fusion Block (CFB) to further improve the model's performance and reduce computational overhead. Our experiments demonstrate that FMViT surpasses existing CNNs, ViTs, and CNNTransformer hybrid architectures in terms of latency/accuracy trade-offs for various vision tasks. On the TensorRT platform, FMViT outperforms Resnet101 by 2.5% (83.3% vs. 80.8%) in top-1 accuracy on the ImageNet dataset while maintaining similar inference latency. Moreover, FMViT achieves comparable performance with EfficientNet-B5, but with a 43% improvement in inference speed. On CoreML, FMViT outperforms MobileOne by 2.6% in top-1 accuracy on the ImageNet dataset, with inference latency comparable to MobileOne (78.5% vs. 75.9%). Our code can be found at https://github.com/tany0699/FMViT.
Leveraging Artificial Intelligence Technology for Mapping Research to Sustainable Development Goals: A Case Study
Nov 09, 2023The number of publications related to the Sustainable Development Goals (SDGs) continues to grow. These publications cover a diverse spectrum of research, from humanities and social sciences to engineering and health. Given the imperative of funding bodies to monitor outcomes and impacts, linking publications to relevant SDGs is critical but remains time-consuming and difficult given the breadth and complexity of the SDGs. A publication may relate to several goals (interconnection feature of goals), and therefore require multidisciplinary knowledge to tag accurately. Machine learning approaches are promising and have proven particularly valuable for tasks such as manual data labeling and text classification. In this study, we employed over 82,000 publications from an Australian university as a case study. We utilized a similarity measure to map these publications onto Sustainable Development Goals (SDGs). Additionally, we leveraged the OpenAI GPT model to conduct the same task, facilitating a comparative analysis between the two approaches. Experimental results show that about 82.89% of the results obtained by the similarity measure overlap (at least one tag) with the outputs of the GPT model. The adopted model (similarity measure) can complement GPT model for SDG classification. Furthermore, deep learning methods, which include the similarity measure used here, are more accessible and trusted for dealing with sensitive data without the use of commercial AI services or the deployment of expensive computing resources to operate large language models. Our study demonstrates how a crafted combination of the two methods can achieve reliable results for mapping research to the SDGs.
CROMA: Remote Sensing Representations with Contrastive Radar-Optical Masked Autoencoders
Nov 01, 2023A vital and rapidly growing application, remote sensing offers vast yet sparsely labeled, spatially aligned multimodal data; this makes self-supervised learning algorithms invaluable. We present CROMA: a framework that combines contrastive and reconstruction self-supervised objectives to learn rich unimodal and multimodal representations. Our method separately encodes masked-out multispectral optical and synthetic aperture radar samples -- aligned in space and time -- and performs cross-modal contrastive learning. Another encoder fuses these sensors, producing joint multimodal encodings that are used to predict the masked patches via a lightweight decoder. We show that these objectives are complementary when leveraged on spatially aligned multimodal data. We also introduce X- and 2D-ALiBi, which spatially biases our cross- and self-attention matrices. These strategies improve representations and allow our models to effectively extrapolate to images up to 17.6x larger at test-time. CROMA outperforms the current SoTA multispectral model, evaluated on: four classification benchmarks -- finetuning (avg. 1.8%), linear (avg. 2.4%) and nonlinear (avg. 1.4%) probing, kNN classification (avg. 3.5%), and K-means clustering (avg. 8.4%); and three segmentation benchmarks (avg. 6.4%). CROMA's rich, optionally multimodal representations can be widely leveraged across remote sensing applications.
Streaming Factor Trajectory Learning for Temporal Tensor Decomposition
Nov 07, 2023Practical tensor data is often along with time information. Most existing temporal decomposition approaches estimate a set of fixed factors for the objects in each tensor mode, and hence cannot capture the temporal evolution of the objects' representation. More important, we lack an effective approach to capture such evolution from streaming data, which is common in real-world applications. To address these issues, we propose Streaming Factor Trajectory Learning for temporal tensor decomposition. We use Gaussian processes (GPs) to model the trajectory of factors so as to flexibly estimate their temporal evolution. To address the computational challenges in handling streaming data, we convert the GPs into a state-space prior by constructing an equivalent stochastic differential equation (SDE). We develop an efficient online filtering algorithm to estimate a decoupled running posterior of the involved factor states upon receiving new data. The decoupled estimation enables us to conduct standard Rauch-Tung-Striebel smoothing to compute the full posterior of all the trajectories in parallel, without the need for revisiting any previous data. We have shown the advantage of SFTL in both synthetic tasks and real-world applications. The code is available at {https://github.com/xuangu-fang/Streaming-Factor-Trajectory-Learning}.
Terrain Recognition and Contact Force Estimation through a Sensorized Paw for Legged Robots
Nov 07, 2023This paper introduces the Terrain Recognition And Contact Force Estimation Paw, a compact and sensorized shoe designed for legged robots. The paw end-effector is made of silicon that deforms upon the application of contact forces, while an embedded micro camera is utilized to capture images of the deformed inner surface inside the shoe, and a microphone picks up audio signals. Processed through machine learning techniques, the images are mapped to compute an accurate estimate of the cumulative 3D force vector, while the audio signals are analyzed to identify the terrain class (e.g., gravel, snow). By leveraging its on-edge computation ability, the paw enhances the capabilities of legged robots by providing key information in real-time that can be used to adapt locomotion control strategies. To assess the performance of this novel sensorized paw, we conducted experiments on the data collected through a specially-designed testbed for force estimation, as well as data from recordings of the audio signatures of different terrains interacting with the paw. The results demonstrate the accuracy and effectiveness of the system, highlighting its potential for improving legged robot performance.
Meta-Adapter: An Online Few-shot Learner for Vision-Language Model
Nov 07, 2023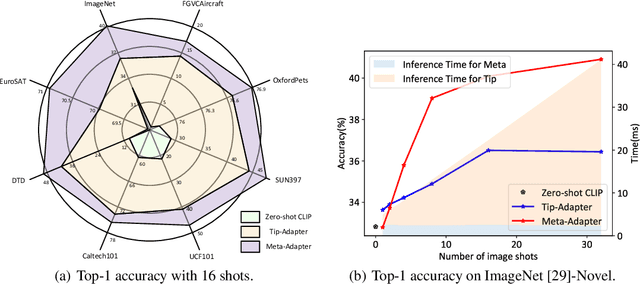
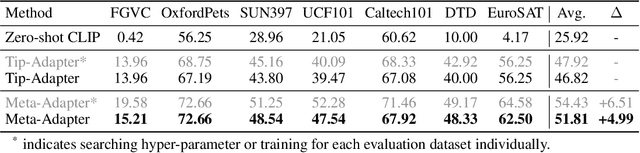
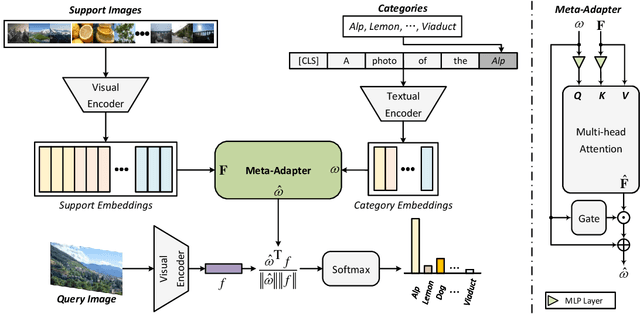
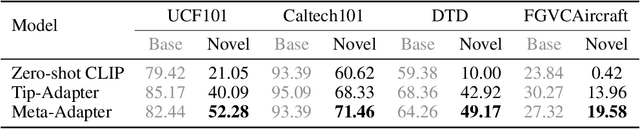
The contrastive vision-language pre-training, known as CLIP, demonstrates remarkable potential in perceiving open-world visual concepts, enabling effective zero-shot image recognition. Nevertheless, few-shot learning methods based on CLIP typically require offline fine-tuning of the parameters on few-shot samples, resulting in longer inference time and the risk of over-fitting in certain domains. To tackle these challenges, we propose the Meta-Adapter, a lightweight residual-style adapter, to refine the CLIP features guided by the few-shot samples in an online manner. With a few training samples, our method can enable effective few-shot learning capabilities and generalize to unseen data or tasks without additional fine-tuning, achieving competitive performance and high efficiency. Without bells and whistles, our approach outperforms the state-of-the-art online few-shot learning method by an average of 3.6\% on eight image classification datasets with higher inference speed. Furthermore, our model is simple and flexible, serving as a plug-and-play module directly applicable to downstream tasks. Without further fine-tuning, Meta-Adapter obtains notable performance improvements in open-vocabulary object detection and segmentation tasks.