 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Estimating optical vegetation indices with Sentinel-1 SAR data and AutoML
Nov 13, 2023
Current optical vegetation indices (VIs) for monitoring forest ecosystems are widely used in various applications. However, continuous monitoring based on optical satellite data can be hampered by atmospheric effects such as clouds. On the contrary, synthetic aperture radar (SAR) data can offer insightful and systematic forest monitoring with complete time series due to signal penetration through clouds and day and night acquisitions. The goal of this work is to overcome the issues affecting optical data with SAR data and serve as a substitute for estimating optical VIs for forests using machine learning. Time series of four VIs (LAI, FAPAR, EVI and NDVI) were estimated using multitemporal Sentinel-1 SAR and ancillary data. This was enabled by creating a paired multi-temporal and multi-modal dataset in Google Earth Engine (GEE), including temporally and spatially aligned Sentinel-1, Sentinel-2, digital elevation model (DEM), weather and land cover datasets (MMT-GEE). The use of ancillary features generated from DEM and weather data improved the results. The open-source Automatic Machine Learning (AutoML) approach, auto-sklearn, outperformed Random Forest Regression for three out of four VIs, while a 1-hour optimization length was enough to achieve sufficient results with an R2 of 69-84% low errors (0.05-0.32 of MAE depending on VI). Great agreement was also found for selected case studies in the time series analysis and in the spatial comparison between the original and estimated SAR-based VIs. In general, compared to VIs from currently freely available optical satellite data and available global VI products, a better temporal resolution (up to 240 measurements/year) and a better spatial resolution (20 m) were achieved using estimated SAR-based VIs. A great advantage of the SAR-based VI is the ability to detect abrupt forest changes with a sub-weekly temporal accuracy.
Explainable Product Classification for Customs
Nov 18, 2023The task of assigning internationally accepted commodity codes (aka HS codes) to traded goods is a critical function of customs offices. Like court decisions made by judges, this task follows the doctrine of precedent and can be nontrivial even for experienced officers. Together with the Korea Customs Service (KCS), we propose a first-ever explainable decision supporting model that suggests the most likely subheadings (i.e., the first six digits) of the HS code. The model also provides reasoning for its suggestion in the form of a document that is interpretable by customs officers. We evaluated the model using 5,000 cases that recently received a classification request. The results showed that the top-3 suggestions made by our model had an accuracy of 93.9\% when classifying 925 challenging subheadings. A user study with 32 customs experts further confirmed that our algorithmic suggestions accompanied by explainable reasonings, can substantially reduce the time and effort taken by customs officers for classification reviews.
Context Consistency between Training and Testing in Simultaneous Machine Translation
Nov 13, 2023Simultaneous Machine Translation (SiMT) aims to yield a real-time partial translation with a monotonically growing the source-side context. However, there is a counterintuitive phenomenon about the context usage between training and testing: e.g., the wait-k testing model consistently trained with wait-k is much worse than that model inconsistently trained with wait-k' (k' is not equal to k) in terms of translation quality. To this end, we first investigate the underlying reasons behind this phenomenon and uncover the following two factors: 1) the limited correlation between translation quality and training (cross-entropy) loss; 2) exposure bias between training and testing. Based on both reasons, we then propose an effective training approach called context consistency training accordingly, which makes consistent the context usage between training and testing by optimizing translation quality and latency as bi-objectives and exposing the predictions to the model during the training. The experiments on three language pairs demonstrate our intuition: our system encouraging context consistency outperforms that existing systems with context inconsistency for the first time, with the help of our context consistency training approach.
Embarassingly Simple Dataset Distillation
Nov 13, 2023Dataset distillation extracts a small set of synthetic training samples from a large dataset with the goal of achieving competitive performance on test data when trained on this sample. In this work, we tackle dataset distillation at its core by treating it directly as a bilevel optimization problem. Re-examining the foundational back-propagation through time method, we study the pronounced variance in the gradients, computational burden, and long-term dependencies. We introduce an improved method: Random Truncated Backpropagation Through Time (RaT-BPTT) to address them. RaT-BPTT incorporates a truncation coupled with a random window, effectively stabilizing the gradients and speeding up the optimization while covering long dependencies. This allows us to establish new state-of-the-art for a variety of standard dataset benchmarks. A deeper dive into the nature of distilled data unveils pronounced intercorrelation. In particular, subsets of distilled datasets tend to exhibit much worse performance than directly distilled smaller datasets of the same size. Leveraging RaT-BPTT, we devise a boosting mechanism that generates distilled datasets that contain subsets with near optimal performance across different data budgets.
Fast Normalized Cross-Correlation for Template Matching with Rotations
Nov 13, 2023Normalized cross-correlation is the reference approach to carry out template matching on images. When it is computed in Fourier space, it can handle efficiently template translations but it cannot do so with template rotations. Including rotations requires sampling the whole space of rotations, repeating the computation of the correlation each time. This article develops an alternative mathematical theory to handle efficiently, at the same time, rotations and translations. Our proposal has a reduced computational complexity because it does not require to repeatedly sample the space of rotations. To do so, we integrate the information relative to all rotated versions of the template into a unique symmetric tensor template -which is computed only once per template-. Afterward, we demonstrate that the correlation between the image to be processed with the independent tensor components of the tensorial template contains enough information to recover template instance positions and rotations. Our proposed method has the potential to speed up conventional template matching computations by a factor of several magnitude orders for the case of 3D images.
Supersampling of Data from Structured-light Scanner with Deep Learning
Nov 13, 2023This paper focuses on increasing the resolution of depth maps obtained from 3D cameras using structured light technology. Two deep learning models FDSR and DKN are modified to work with high-resolution data, and data pre-processing techniques are implemented for stable training. The models are trained on our custom dataset of 1200 3D scans. The resulting high-resolution depth maps are evaluated using qualitative and quantitative metrics. The approach for depth map upsampling offers benefits such as reducing the processing time of a pipeline by first downsampling a high-resolution depth map, performing various processing steps at the lower resolution and upsampling the resulting depth map or increasing the resolution of a point cloud captured in lower resolution by a cheaper device. The experiments demonstrate that the FDSR model excels in terms of faster processing time, making it a suitable choice for applications where speed is crucial. On the other hand, the DKN model provides results with higher precision, making it more suitable for applications that prioritize accuracy.
Using linear initialisation to improve speed of convergence and fully-trained error in Autoencoders
Nov 17, 2023Good weight initialisation is an important step in successful training of Artificial Neural Networks. Over time a number of improvements have been proposed to this process. In this paper we introduce a novel weight initialisation technique called the Straddled Matrix Initialiser. This initialisation technique is motivated by our assumption that major, global-scale relationships in data are linear with only smaller effects requiring complex non-linearities. Combination of Straddled Matrix and ReLU activation function initialises a Neural Network as a de facto linear model, which we postulate should be a better starting point for optimisation given our assumptions. We test this by training autoencoders on three datasets using Straddled Matrix and seven other state-of-the-art weight initialisation techniques. In all our experiments the Straddeled Matrix Initialiser clearly outperforms all other methods.
RT-SRTS: Angle-Agnostic Real-Time Simultaneous 3D Reconstruction and Tumor Segmentation from Single X-Ray Projection
Oct 12, 2023Radiotherapy is one of the primary treatment methods for tumors, but the organ movement caused by respiratory motion limits its accuracy. Recently, 3D imaging from single X-ray projection receives extensive attentions as a promising way to address this issue. However, current methods can only reconstruct 3D image without direct location of the tumor and are only validated for fixed-angle imaging, which fails to fully meet the requirement of motion control in radiotherapy. In this study, we propose a novel imaging method RT-SRTS which integrates 3D imaging and tumor segmentation into one network based on the multi-task learning (MTL) and achieves real-time simultaneous 3D reconstruction and tumor segmentation from single X-ray projection at any angle. Futhermore, we propose the attention enhanced calibrator (AEC) and uncertain-region elaboration (URE) modules to aid feature extraction and improve segmentation accuracy. We evaluated the proposed method on ten patient cases and compared it with two state-of-the-art methods. Our approach not only delivered superior 3D reconstruction but also demonstrated commendable tumor segmentation results. The simultaneous reconstruction and segmentation could be completed in approximately 70 ms, significantly faster than the required time threshold for real-time tumor tracking. The efficacy of both AEC and URE was also validated through ablation studies.
AdaMap: High-Scalable Real-Time Cooperative Perception at the Edge
Oct 03, 2023Cooperative perception is the key approach to augment the perception of connected and automated vehicles (CAVs) toward safe autonomous driving. However, it is challenging to achieve real-time perception sharing for hundreds of CAVs in large-scale deployment scenarios. In this paper, we propose AdaMap, a new high-scalable real-time cooperative perception system, which achieves assured percentile end-to-end latency under time-varying network dynamics. To achieve AdaMap, we design a tightly coupled data plane and control plane. In the data plane, we design a new hybrid localization module to dynamically switch between object detection and tracking, and a novel point cloud representation module to adaptively compress and reconstruct the point cloud of detected objects. In the control plane, we design a new graph-based object selection method to un-select excessive multi-viewed point clouds of objects, and a novel approximated gradient descent algorithm to optimize the representation of point clouds. We implement AdaMap on an emulation platform, including realistic vehicle and server computation and a simulated 5G network, under a 150-CAV trace collected from the CARLA simulator. The evaluation results show that, AdaMap reduces up to 49x average transmission data size at the cost of 0.37 reconstruction loss, as compared to state-of-the-art solutions, which verifies its high scalability, adaptability, and computation efficiency.
Disentangling Structure and Appearance in ViT Feature Space
Nov 20, 2023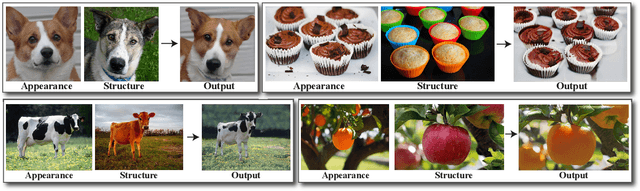

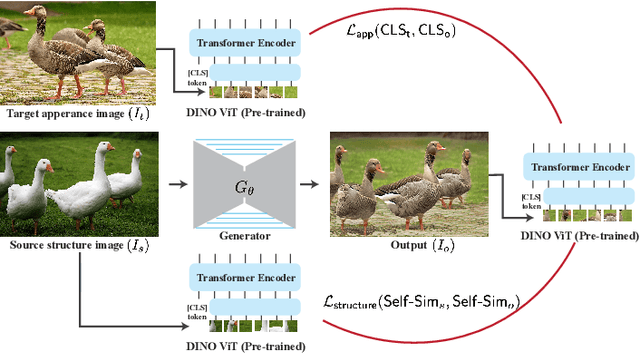
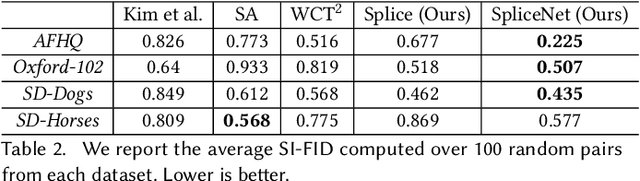
We present a method for semantically transferring the visual appearance of one natural image to another. Specifically, our goal is to generate an image in which objects in a source structure image are "painted" with the visual appearance of their semantically related objects in a target appearance image. To integrate semantic information into our framework, our key idea is to leverage a pre-trained and fixed Vision Transformer (ViT) model. Specifically, we derive novel disentangled representations of structure and appearance extracted from deep ViT features. We then establish an objective function that splices the desired structure and appearance representations, interweaving them together in the space of ViT features. Based on our objective function, we propose two frameworks of semantic appearance transfer -- "Splice", which works by training a generator on a single and arbitrary pair of structure-appearance images, and "SpliceNet", a feed-forward real-time appearance transfer model trained on a dataset of images from a specific domain. Our frameworks do not involve adversarial training, nor do they require any additional input information such as semantic segmentation or correspondences. We demonstrate high-resolution results on a variety of in-the-wild image pairs, under significant variations in the number of objects, pose, and appearance. Code and supplementary material are available in our project page: splice-vit.github.io.