 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Low Complexity Algorithms for Mission Completion Time Minimization in UAV-Based ISAC Systems
Oct 12, 2023
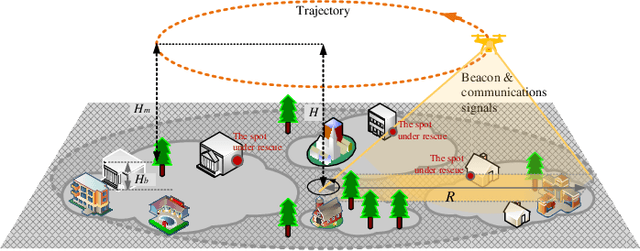
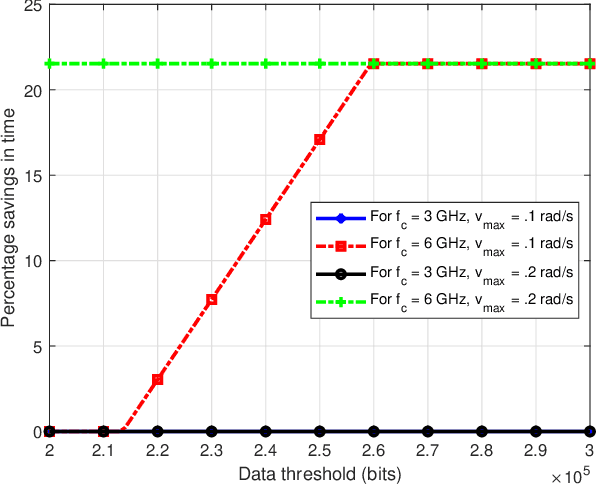
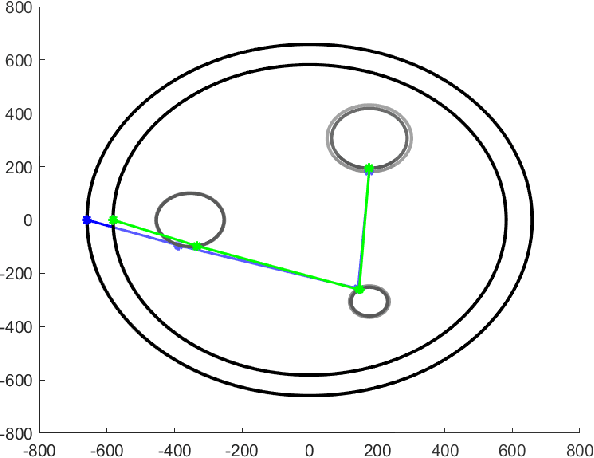
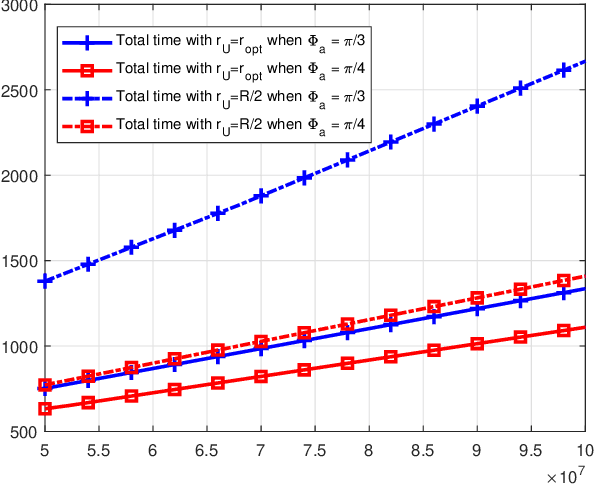
The inherent support of sixth-generation (6G) systems enabling integrated sensing and communications (ISAC) paradigm greatly enhances the application area of intelligent transportation systems (ITS). One of the mission-critical applications enabled by these systems is disaster management, where ISAC functionality may not only provide localization but also provide users with supplementary information such as escape routes, time to rescue, etc. In this paper, by considering a large area with several locations of interest, we formulate and solve the optimization problem of delivering task parameters of the ISAC system by optimizing the UAV speed and the order of visits to the locations of interest such that the mission time is minimized. The formulated problem is a mixed integer non-linear program which is quite challenging to solve. To reduce the complexity of the solution algorithms, we propose two circular trajectory designs. The first algorithm finds the optimal UAV velocity and radius of the circular trajectories. The second algorithm finds the optimal connecting points for joining the individual circular trajectories. Our numerical results reveal that, with practical simulation parameters, the first algorithm provides a time saving of at least $20\%$, while the second algorithm cuts down the total completion time by at least $7$ times.
FViT-Grasp: Grasping Objects With Using Fast Vision Transformers
Nov 23, 2023This study addresses the challenge of manipulation, a prominent issue in robotics. We have devised a novel methodology for swiftly and precisely identifying the optimal grasp point for a robot to manipulate an object. Our approach leverages a Fast Vision Transformer (FViT), a type of neural network designed for processing visual data and predicting the most suitable grasp location. Demonstrating state-of-the-art performance in terms of speed while maintaining a high level of accuracy, our method holds promise for potential deployment in real-time robotic grasping applications. We believe that this study provides a baseline for future research in vision-based robotic grasp applications. Its high speed and accuracy bring researchers closer to real-life applications.
Piezoelectric Sensors for Real-time Monitoring and Quality Control in Additive Manufacturing
Oct 22, 2023Within the ever-evolving landscape of engineering, particularly in the dynamic domain of additive In manufacturing, a pursuit of precision and excellence in production processes takes centre stage. This research , This paper serves to give a comprehensive understanding of piezoelectric sensors, a topic that is both academically engaging and of practical significance, catering to both seasoned experts and those newly venturing into the field. Additive manufacturing, lauded for its groundbreaking potential, underscores the imperative of rigorous quality control. This introduces piezoelectric sensors, devices that may be unfamiliar to many but possess considerable potential. This paper embarks on a methodical journey, commencing with an introductory elucidation of the piezoelectric effect. It then advances to the vital role of piezoelectric sensors in real-time monitoring and quality control, unveiling their potential and relevance for newcomers and seasoned professionals alike. This research, structured systematically from fundamental principles to pragmatic applications, presents findings that are not only academically informative but also represent a substantial stride towards achieving precision and high-quality manufacturing processes in the engineering field.
Real-time Perceptive Motion Control using Control Barrier Functions with Analytical Smoothing for Six-Wheeled-Telescopic-Legged Robot Tachyon 3
Oct 18, 2023To achieve safe legged locomotion, it is important to generate motion in real-time considering various constraints in robots and environments. In this study, we propose a lightweight real-time perspective motion control system for the newly developed six-wheeled-telescopic-legged robot, Tachyon 3. In the proposed method, analytically smoothed constraints including Smooth Separating Axis Theorem (Smooth SAT) as a novel higher order differentiable collision detection for 3D shapes is applied to the Control Barrier Function (CBF). The proposed system integrating the CBF achieves online motion generation in a short control cycle of 1 ms that satisfies joint limitations, environmental collision avoidance and safe convex foothold constraints. The efficiency of Smooth SAT is shown from the collision detection time of 1 us or less and the CBF constraint computation time for Tachyon3 of several us. Furthermore, the effectiveness of the proposed system is verified through the stair-climbing motion, integrating online recognition in a simulation and a real machine.
Generalized Robust Test-Time Adaptation in Continuous Dynamic Scenarios
Oct 07, 2023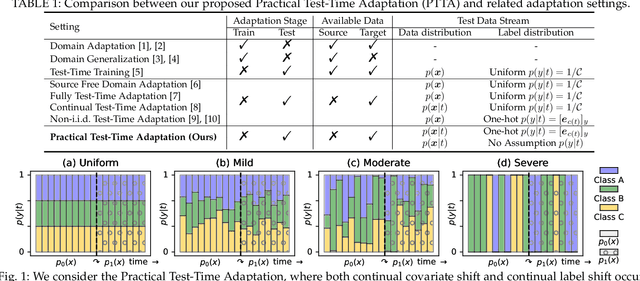
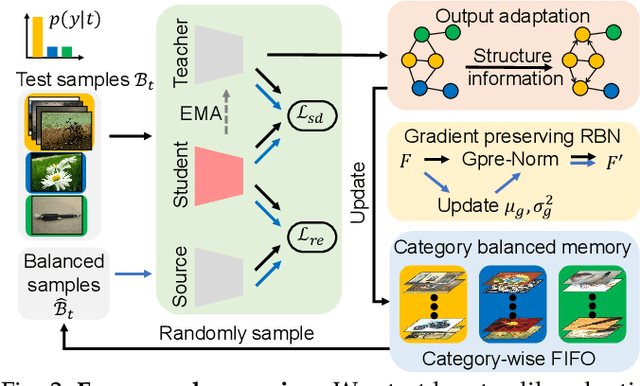
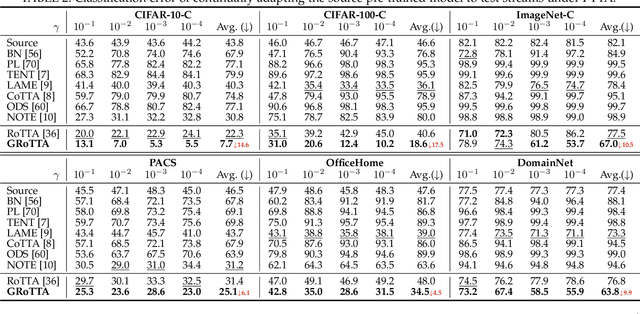

Test-time adaptation (TTA) adapts the pre-trained models to test distributions during the inference phase exclusively employing unlabeled test data streams, which holds great value for the deployment of models in real-world applications. Numerous studies have achieved promising performance on simplistic test streams, characterized by independently and uniformly sampled test data originating from a fixed target data distribution. However, these methods frequently prove ineffective in practical scenarios, where both continual covariate shift and continual label shift occur simultaneously, i.e., data and label distributions change concurrently and continually over time. In this study, a more challenging Practical Test-Time Adaptation (PTTA) setup is introduced, which takes into account the concurrent presence of continual covariate shift and continual label shift, and we propose a Generalized Robust Test-Time Adaptation (GRoTTA) method to effectively address the difficult problem. We start by steadily adapting the model through Robust Parameter Adaptation to make balanced predictions for test samples. To be specific, firstly, the effects of continual label shift are eliminated by enforcing the model to learn from a uniform label distribution and introducing recalibration of batch normalization to ensure stability. Secondly, the continual covariate shift is alleviated by employing a source knowledge regularization with the teacher-student model to update parameters. Considering the potential information in the test stream, we further refine the balanced predictions by Bias-Guided Output Adaptation, which exploits latent structure in the feature space and is adaptive to the imbalanced label distribution. Extensive experiments demonstrate GRoTTA outperforms the existing competitors by a large margin under PTTA setting, rendering it highly conducive for adoption in real-world applications.
Maximizing Performance with Minimal Resources for Real-Time Transition Detection
Oct 06, 2023
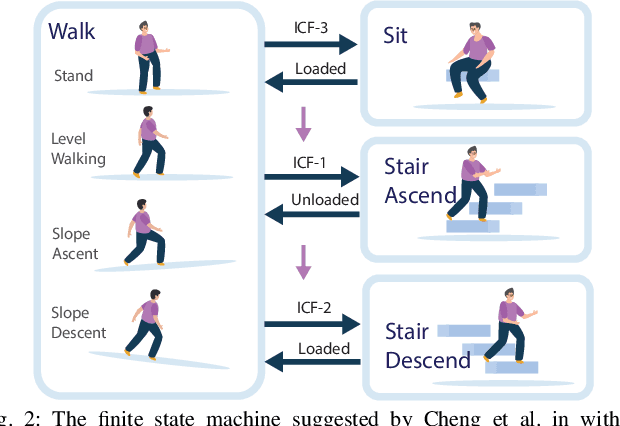
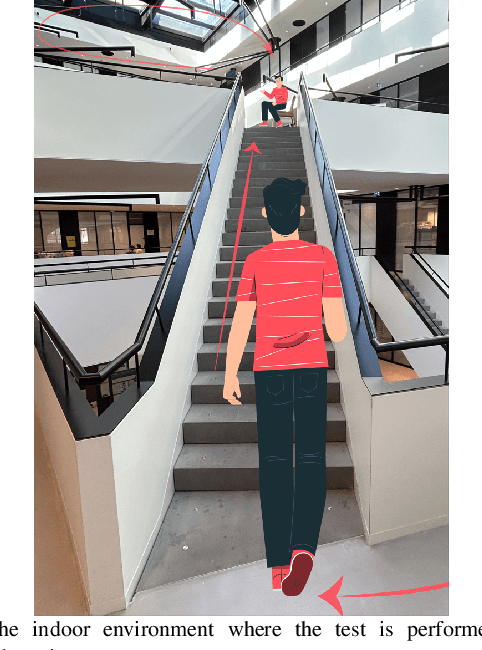
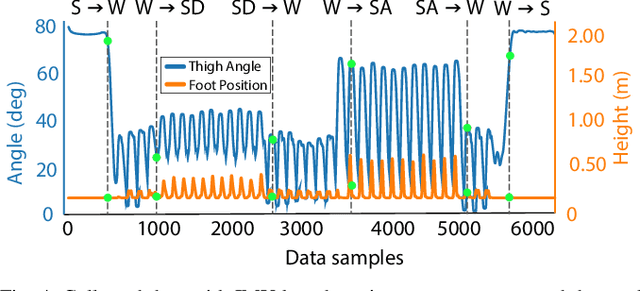
Assistive devices, such as exoskeletons and prostheses, have revolutionized the field of rehabilitation and mobility assistance. Efficiently detecting transitions between different activities, such as walking, stair ascending and descending, and sitting, is crucial for ensuring adaptive control and enhancing user experience. We here present an approach for real-time transition detection, aimed at optimizing the processing-time performance. By establishing activity-specific threshold values through trained machine learning models, we effectively distinguish motion patterns and we identify transition moments between locomotion modes. This threshold-based method improves real-time embedded processing time performance by up to 11 times compared to machine learning approaches. The efficacy of the developed finite-state machine is validated using data collected from three different measurement systems. Moreover, experiments with healthy participants were conducted on an active pelvis orthosis to validate the robustness and reliability of our approach. The proposed algorithm achieved high accuracy in detecting transitions between activities. These promising results show the robustness and reliability of the method, reinforcing its potential for integration into practical applications.
Data Augmentation for Time-Series Classification: An Extensive Empirical Study and Comprehensive Survey
Oct 19, 2023Data Augmentation (DA) has emerged as an indispensable strategy in Time Series Classification (TSC), primarily due to its capacity to amplify training samples, thereby bolstering model robustness, diversifying datasets, and curtailing overfitting. However, the current landscape of DA in TSC is plagued with fragmented literature reviews, nebulous methodological taxonomies, inadequate evaluative measures, and a dearth of accessible, user-oriented tools. In light of these challenges, this study embarks on an exhaustive dissection of DA methodologies within the TSC realm. Our initial approach involved an extensive literature review spanning a decade, revealing that contemporary surveys scarcely capture the breadth of advancements in DA for TSC, prompting us to meticulously analyze over 100 scholarly articles to distill more than 60 unique DA techniques. This rigorous analysis precipitated the formulation of a novel taxonomy, purpose-built for the intricacies of DA in TSC, categorizing techniques into five principal echelons: Transformation-Based, Pattern-Based, Generative, Decomposition-Based, and Automated Data Augmentation. Our taxonomy promises to serve as a robust navigational aid for scholars, offering clarity and direction in method selection. Addressing the conspicuous absence of holistic evaluations for prevalent DA techniques, we executed an all-encompassing empirical assessment, wherein upwards of 15 DA strategies were subjected to scrutiny across 8 UCR time-series datasets, employing ResNet and a multi-faceted evaluation paradigm encompassing Accuracy, Method Ranking, and Residual Analysis, yielding a benchmark accuracy of 88.94 +- 11.83%. Our investigation underscored the inconsistent efficacies of DA techniques, with...
Parallel Bayesian Optimization Using Satisficing Thompson Sampling for Time-Sensitive Black-Box Optimization
Oct 19, 2023Bayesian optimization (BO) is widely used for black-box optimization problems, and have been shown to perform well in various real-world tasks. However, most of the existing BO methods aim to learn the optimal solution, which may become infeasible when the parameter space is extremely large or the problem is time-sensitive. In these contexts, switching to a satisficing solution that requires less information can result in better performance. In this work, we focus on time-sensitive black-box optimization problems and propose satisficing Thompson sampling-based parallel Bayesian optimization (STS-PBO) approaches, including synchronous and asynchronous versions. We shift the target from an optimal solution to a satisficing solution that is easier to learn. The rate-distortion theory is introduced to construct a loss function that balances the amount of information that needs to be learned with sub-optimality, and the Blahut-Arimoto algorithm is adopted to compute the target solution that reaches the minimum information rate under the distortion limit at each step. Both discounted and undiscounted Bayesian cumulative regret bounds are theoretically derived for the proposed STS-PBO approaches. The effectiveness of the proposed methods is demonstrated on a fast-charging design problem of Lithium-ion batteries. The results are accordant with theoretical analyses, and show that our STS-PBO methods outperform both sequential counterparts and parallel BO with traditional Thompson sampling in both synchronous and asynchronous settings.
Robotic Detection and Estimation of Single Scuba Diver Respiration Rate from Underwater Video
Nov 24, 2023Human respiration rate (HRR) is an important physiological metric for diagnosing a variety of health conditions from stress levels to heart conditions. Estimation of HRR is well-studied in controlled terrestrial environments, yet robotic estimation of HRR as an indicator of diver stress in underwater for underwater human robot interaction (UHRI) scenarios is to our knowledge unexplored. We introduce a novel system for robotic estimation of HRR from underwater visual data by utilizing bubbles from exhalation cycles in scuba diving to time respiration rate. We introduce a fuzzy labeling system that utilizes audio information to label a diverse dataset of diver breathing data on which we compare four different methods for characterizing the presence of bubbles in images. Ultimately we show that our method is effective at estimating HRR by comparing the respiration rate output with human analysts.
What User Behaviors Make the Differences During the Process of Visual Analytics?
Nov 17, 2023The understanding of visual analytics process can benefit visualization researchers from multiple aspects, including improving visual designs and developing advanced interaction functions. However, the log files of user behaviors are still hard to analyze due to the complexity of sensemaking and our lack of knowledge on the related user behaviors. This work presents a study on a comprehensive data collection of user behaviors, and our analysis approach with time-series classification methods. We have chosen a classical visualization application, Covid-19 data analysis, with common analysis tasks covering geo-spatial, time-series and multi-attributes. Our user study collects user behaviors on a diverse set of visualization tasks with two comparable systems, desktop and immersive visualizations. We summarize the classification results with three time-series machine learning algorithms at two scales, and explore the influences of behavior features. Our results reveal that user behaviors can be distinguished during the process of visual analytics and there is a potentially strong association between the physical behaviors of users and the visualization tasks they perform. We also demonstrate the usage of our models by interpreting open sessions of visual analytics, which provides an automatic way to study sensemaking without tedious manual annotations.