 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Anonymous Jamming Detection in 5G with Bayesian Network Model Based Inference Analysis
Nov 28, 2023
Jamming and intrusion detection are critical in 5G research, aiming to maintain reliability, prevent user experience degradation, and avoid infrastructure failure. This paper introduces an anonymous jamming detection model for 5G based on signal parameters from the protocol stacks. The system uses supervised and unsupervised learning for real-time, high-accuracy detection of jamming, including unknown types. Supervised models reach an AUC of 0.964 to 1, compared to LSTM models with an AUC of 0.923 to 1. However, the need for data annotation limits the supervised approach. To address this, an unsupervised auto-encoder-based anomaly detection is presented with an AUC of 0.987. The approach is resistant to adversarial training samples. For transparency and domain knowledge injection, a Bayesian network-based causation analysis is introduced.
Beamforming Design for the Distributed RISs-aided THz Communications with Double-Layer True Time Delays
Oct 21, 2023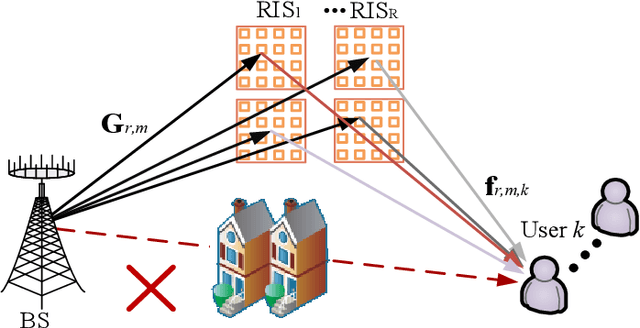
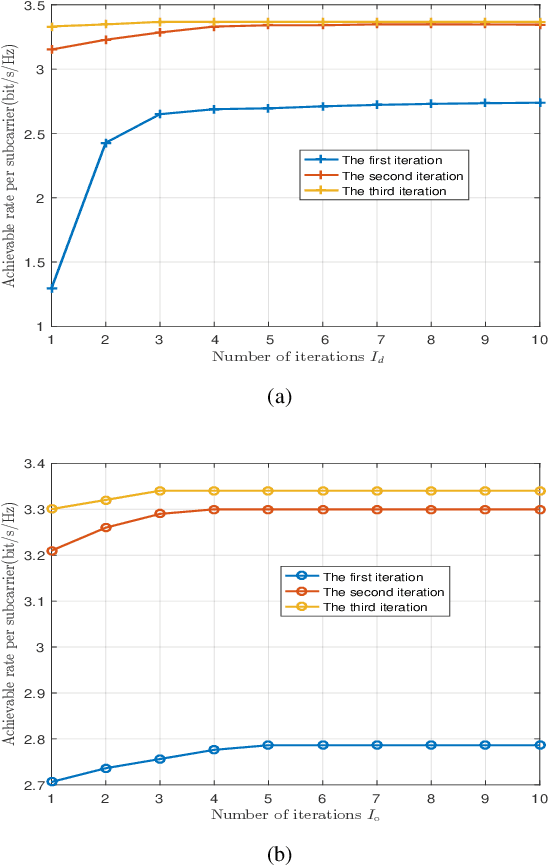
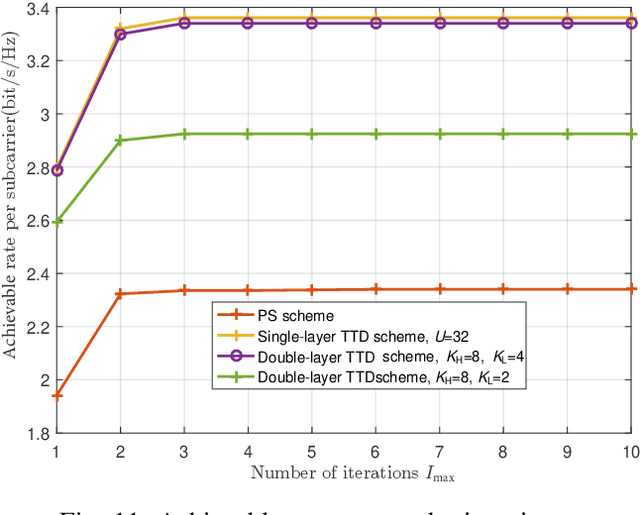
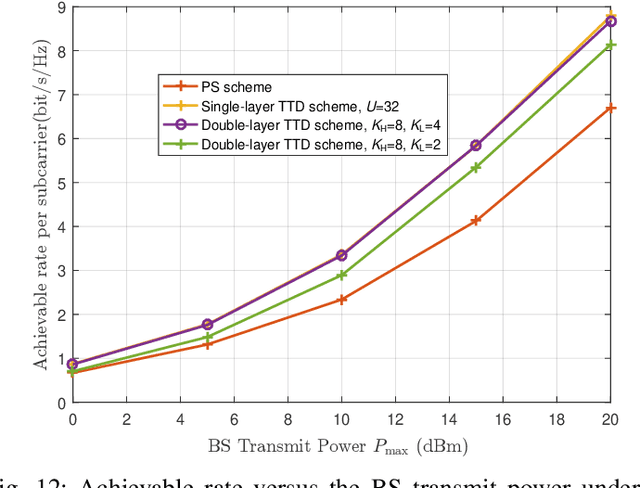
In this paper, we investigate the reconfigurable intelligent surface (RIS)-aided terahertz (THz) communication system with the sparse radio frequency chains antenna structure at the base station (BS). To overcome the beam split of the BS, different from the conventional single-layer true-time-delay (TTD) scheme, we propose a double-layer TTD scheme that can effectively reduce the number of large-range delay devices, which involve additional insertion loss and amplification circuitry. Next, we analyze the system performance under the proposed double-layer TTD scheme. To relieve the beam split of the RIS, we consider multiple distributed RISs to replace an ultra-large size RIS. Based on this, we formulate an achievable rate maximization problem for the distributed RISs-aided THz communications via jointly optimizing the hybrid analog/digital beamforming, time delays of the double-layer TTD network and reflection coefficients of RISs. Considering the practical hardware limitation, the finite-resolution phase shift, time delay and reflection phase are constrained. To solve the formulated problem, we first design an analog beamforming scheme including optimizing phase shift and time delay based on the RISs' locations. Then, an alternatively optimization algorithm is proposed to obtain the digital beamforming and reflection coefficients based on the minimum mean square error and coordinate update techniques. Finally, simulation results show the effectiveness of the proposed scheme.
Words, Subwords, and Morphemes: What Really Matters in the Surprisal-Reading Time Relationship?
Oct 26, 2023An important assumption that comes with using LLMs on psycholinguistic data has gone unverified. LLM-based predictions are based on subword tokenization, not decomposition of words into morphemes. Does that matter? We carefully test this by comparing surprisal estimates using orthographic, morphological, and BPE tokenization against reading time data. Our results replicate previous findings and provide evidence that in the aggregate, predictions using BPE tokenization do not suffer relative to morphological and orthographic segmentation. However, a finer-grained analysis points to potential issues with relying on BPE-based tokenization, as well as providing promising results involving morphologically-aware surprisal estimates and suggesting a new method for evaluating morphological prediction.
Paved2Paradise: Cost-Effective and Scalable LiDAR Simulation by Factoring the Real World
Dec 02, 2023To achieve strong real world performance, neural networks must be trained on large, diverse datasets; however, obtaining and annotating such datasets is costly and time-consuming, particularly for 3D point clouds. In this paper, we describe Paved2Paradise, a simple, cost-effective approach for generating fully labeled, diverse, and realistic lidar datasets from scratch, all while requiring minimal human annotation. Our key insight is that, by deliberately collecting separate "background" and "object" datasets (i.e., "factoring the real world"), we can intelligently combine them to produce a combinatorially large and diverse training set. The Paved2Paradise pipeline thus consists of four steps: (1) collecting copious background data, (2) recording individuals from the desired object class(es) performing different behaviors in an isolated environment (like a parking lot), (3) bootstrapping labels for the object dataset, and (4) generating samples by placing objects at arbitrary locations in backgrounds. To demonstrate the utility of Paved2Paradise, we generated synthetic datasets for two tasks: (1) human detection in orchards (a task for which no public data exists) and (2) pedestrian detection in urban environments. Qualitatively, we find that a model trained exclusively on Paved2Paradise synthetic data is highly effective at detecting humans in orchards, including when individuals are heavily occluded by tree branches. Quantitatively, a model trained on Paved2Paradise data that sources backgrounds from KITTI performs comparably to a model trained on the actual dataset. These results suggest the Paved2Paradise synthetic data pipeline can help accelerate point cloud model development in sectors where acquiring lidar datasets has previously been cost-prohibitive.
Everybody Needs a Little HELP: Explaining Graphs via Hierarchical Concepts
Dec 02, 2023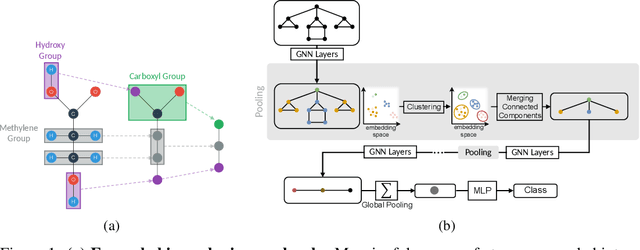

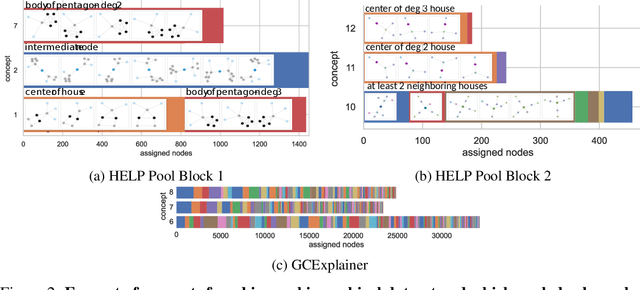

Graph neural networks (GNNs) have led to major breakthroughs in a variety of domains such as drug discovery, social network analysis, and travel time estimation. However, they lack interpretability which hinders human trust and thereby deployment to settings with high-stakes decisions. A line of interpretable methods approach this by discovering a small set of relevant concepts as subgraphs in the last GNN layer that together explain the prediction. This can yield oversimplified explanations, failing to explain the interaction between GNN layers. To address this oversight, we provide HELP (Hierarchical Explainable Latent Pooling), a novel, inherently interpretable graph pooling approach that reveals how concepts from different GNN layers compose to new ones in later steps. HELP is more than 1-WL expressive and is the first non-spectral, end-to-end-learnable, hierarchical graph pooling method that can learn to pool a variable number of arbitrary connected components. We empirically demonstrate that it performs on-par with standard GCNs and popular pooling methods in terms of accuracy while yielding explanations that are aligned with expert knowledge in the domains of chemistry and social networks. In addition to a qualitative analysis, we employ concept completeness scores as well as concept conformity, a novel metric to measure the noise in discovered concepts, quantitatively verifying that the discovered concepts are significantly easier to fully understand than those from previous work. Our work represents a first step towards an understanding of graph neural networks that goes beyond a set of concepts from the final layer and instead explains the complex interplay of concepts on different levels.
Few-Shot Learning Patterns in Financial Time-Series for Trend-Following Strategies
Oct 16, 2023Forecasting models for systematic trading strategies do not adapt quickly when financial market conditions change, as was seen in the advent of the COVID-19 pandemic in 2020, when market conditions changed dramatically causing many forecasting models to take loss-making positions. To deal with such situations, we propose a novel time-series trend-following forecaster that is able to quickly adapt to new market conditions, referred to as regimes. We leverage recent developments from the deep learning community and use few-shot learning. We propose the Cross Attentive Time-Series Trend Network - X-Trend - which takes positions attending over a context set of financial time-series regimes. X-Trend transfers trends from similar patterns in the context set to make predictions and take positions for a new distinct target regime. X-Trend is able to quickly adapt to new financial regimes with a Sharpe ratio increase of 18.9% over a neural forecaster and 10-fold over a conventional Time-series Momentum strategy during the turbulent market period from 2018 to 2023. Our strategy recovers twice as quickly from the COVID-19 drawdown compared to the neural-forecaster. X-Trend can also take zero-shot positions on novel unseen financial assets obtaining a 5-fold Sharpe ratio increase versus a neural time-series trend forecaster over the same period. X-Trend both forecasts next-day prices and outputs a trading signal. Furthermore, the cross-attention mechanism allows us to interpret the relationship between forecasts and patterns in the context set.
Coloring the Past: Neural Historical Buildings Reconstruction from Archival Photography
Nov 29, 2023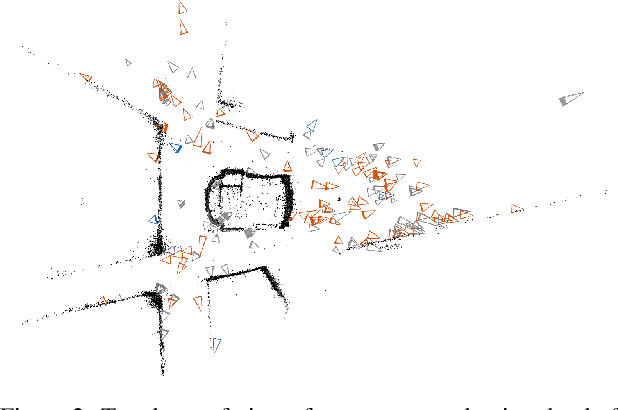
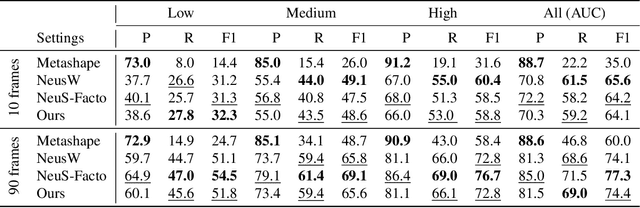
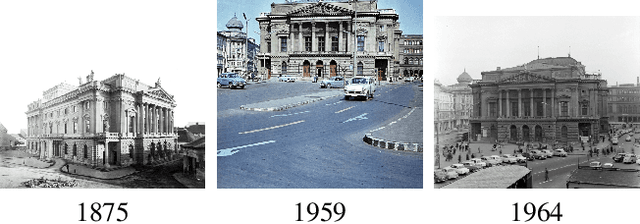

Historical buildings are a treasure and milestone of human cultural heritage. Reconstructing the 3D models of these building hold significant value. The rapid development of neural rendering methods makes it possible to recover the 3D shape only based on archival photographs. However, this task presents considerable challenges due to the limitations of such datasets. Historical photographs are often limited in number and the scenes in these photos might have altered over time. The radiometric quality of these images is also often sub-optimal. To address these challenges, we introduce an approach to reconstruct the geometry of historical buildings, employing volumetric rendering techniques. We leverage dense point clouds as a geometric prior and introduce a color appearance embedding loss to recover the color of the building given limited available color images. We aim for our work to spark increased interest and focus on preserving historical buildings. Thus, we also introduce a new historical dataset of the Hungarian National Theater, providing a new benchmark for the reconstruction method.
Skilful Precipitation Nowcasting Using NowcastNet
Nov 29, 2023Designing early warning system for precipitation requires accurate short-term forecasting system. Climate change has led to an increase in frequency of extreme weather events, and hence such systems can prevent disasters and loss of life. Managing such events remain a challenge for both public and private institutions. Precipitation nowcasting can help relevant institutions to better prepare for such events as they impact agriculture, transport, public health and safety, etc. Physics-based numerical weather prediction (NWP) is unable to perform well for nowcasting because of large computational turn-around time. Deep-learning based models on the other hand are able to give predictions within seconds. We use recently proposed NowcastNet, a physics-conditioned deep generative network, to forecast precipitation for different regions of Europe using satellite images. Both spatial and temporal transfer learning is done by forecasting for the unseen regions and year. Model makes realistic predictions and is able to outperform baseline for such a prediction task.
Stability control for USVs with SINDY-based online dynamic model update
Nov 29, 2023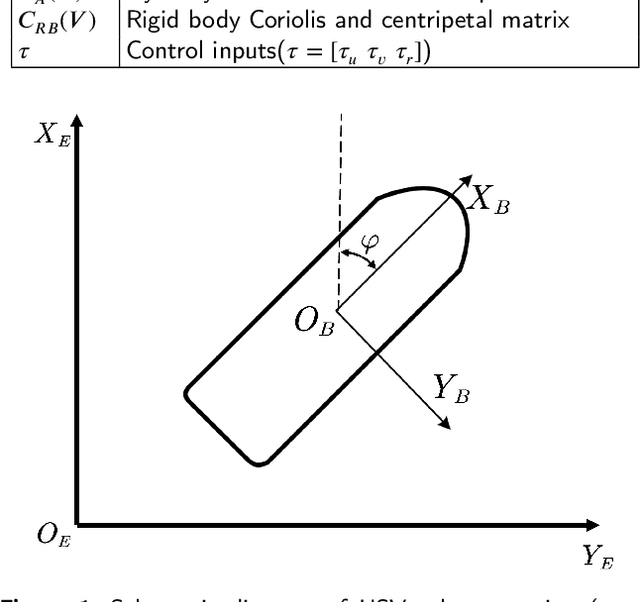
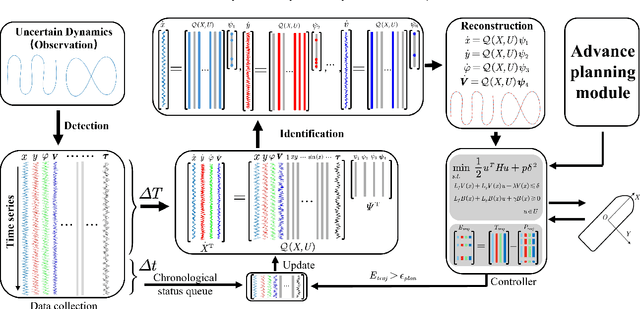
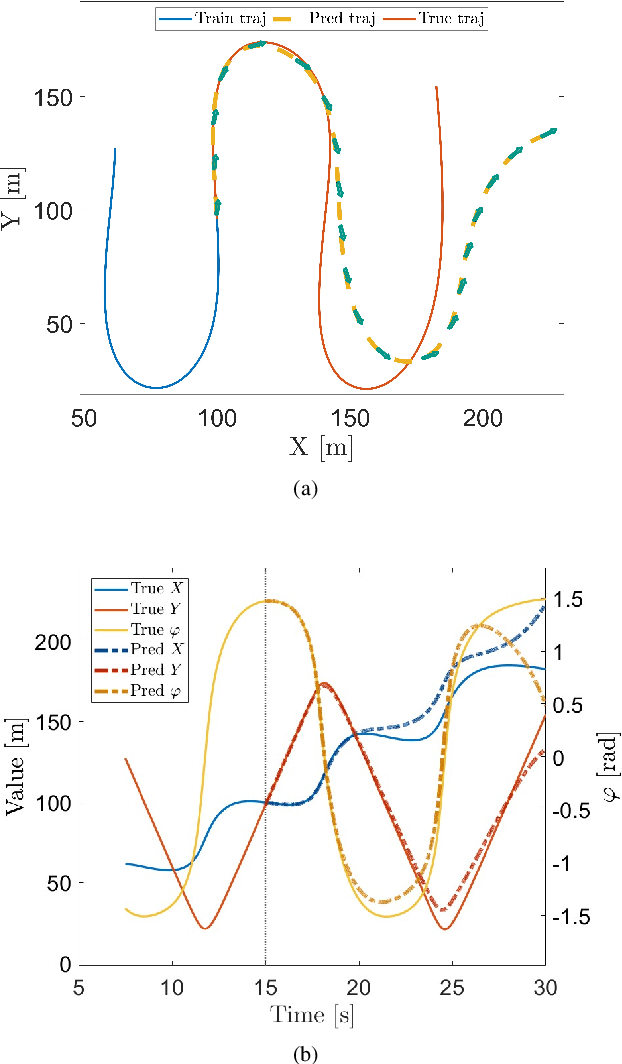
Unmanned Surface Vehicles (USVs) play a pivotal role in various applications, including surface rescue, commercial transactions, scientific exploration, water rescue, and military operations. The effective control of high-speed unmanned surface boats stands as a critical aspect within the overall USV system, particularly in challenging environments marked by complex surface obstacles and dynamic conditions, such as time-varying surges, non-directional forces, and unpredictable winds. In this paper, we propose a data-driven control method based on Koopman theory. This involves constructing a high-dimensional linear model by mapping a low-dimensional nonlinear model to a higher-dimensional linear space through data identification. The observable USVs dynamical system is dynamically reconstructed using online error learning. To enhance tracking control accuracy, we utilize a Constructive Lyapunov Function (CLF)-Control Barrier Function (CBF)-Quadratic Programming (QP) approach to regulate the high-dimensional linear dynamical system obtained through identification. This approach facilitates error compensation, thereby achieving more precise tracking control.
Bevel-Tip Needle Deflection Modeling, Simulation, and Validation in Multi-Layer Tissues
Nov 29, 2023Percutaneous needle insertions are commonly performed for diagnostic and therapeutic purposes as an effective alternative to more invasive surgical procedures. However, the outcome of needle-based approaches relies heavily on the accuracy of needle placement, which remains a challenge even with robot assistance and medical imaging guidance due to needle deflection caused by contact with soft tissues. In this paper, we present a novel mechanics-based 2D bevel-tip needle model that can account for the effect of nonlinear strain-dependent behavior of biological soft tissues under compression. Real-time finite element simulation allows multiple control inputs along the length of the needle with full three-degree-of-freedom (DOF) planar needle motions. Cross-validation studies using custom-designed multi-layer tissue phantoms as well as heterogeneous chicken breast tissues result in less than 1mm in-plane errors for insertions reaching depths of up to 61 mm, demonstrating the validity and generalizability of the proposed method.