 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
DiFace: Cross-Modal Face Recognition through Controlled Diffusion
Dec 03, 2023
Diffusion probabilistic models (DPMs) have exhibited exceptional proficiency in generating visual media of outstanding quality and realism. Nonetheless, their potential in non-generative domains, such as face recognition, has yet to be thoroughly investigated. Meanwhile, despite the extensive development of multi-modal face recognition methods, their emphasis has predominantly centered on visual modalities. In this context, face recognition through textual description presents a unique and promising solution that not only transcends the limitations from application scenarios but also expands the potential for research in the field of cross-modal face recognition. It is regrettable that this avenue remains unexplored and underutilized, a consequence from the challenges mainly associated with three aspects: 1) the intrinsic imprecision of verbal descriptions; 2) the significant gaps between texts and images; and 3) the immense hurdle posed by insufficient databases.To tackle this problem, we present DiFace, a solution that effectively achieves face recognition via text through a controllable diffusion process, by establishing its theoretical connection with probability transport. Our approach not only unleashes the potential of DPMs across a broader spectrum of tasks but also achieves, to the best of our knowledge, a significant accuracy in text-to-image face recognition for the first time, as demonstrated by our experiments on verification and identification.
Joint Beam Scheduling and Power Optimization for Beam Hopping LEO Satellite Systems
Dec 03, 2023Low earth orbit (LEO) satellite communications can provide ubiquitous and reliable services, making it an essential part of the Internet of Everything network. Beam hopping (BH) is an emerging technology for effectively addressing the issue of low resource utilization caused by the non-uniform spatio-temporal distribution of traffic demands. However, how to allocate multi-dimensional resources in a timely and efficient way for the highly dynamic LEO satellite systems remains a challenge. This paper proposes a joint beam scheduling and power optimization beam hopping (JBSPO-BH) algorithm considering the differences in the geographic distribution of sink nodes. The JBSPO-BH algorithm decouples the original problem into two sub-problems. The beam scheduling problem is modelled as a potential game, and the Nash equilibrium (NE) point is obtained as the beam scheduling strategy. Moreover, the penalty function interior point method is applied to optimize the power allocation. Simulation results show that the JBSPO-BH algorithm has low time complexity and fast convergence and achieves better performance both in throughput and fairness. Compared with greedy-based BH, greedy-based BH with the power optimization, round-robin BH, Max-SINR BH and satellite resource allocation algorithm, the throughput of the proposed algorithm is improved by 44.99%, 20.79%, 156.06%, 15.39% and 8.17%, respectively.
Efficient Machine Learning Ensemble Methods for Detecting Gravitational Wave Glitches in LIGO Time Series
Nov 02, 2023The phenomenon of Gravitational Wave (GW) analysis has grown in popularity as technology has advanced and the process of observing gravitational waves has become more precise. Although the sensitivity and the frequency of observation of GW signals are constantly improving, the possibility of noise in the collected GW data remains. In this paper, we propose two new Machine and Deep learning ensemble approaches (i.e., ShallowWaves and DeepWaves Ensembles) for detecting different types of noise and patterns in datasets from GW observatories. Our research also investigates various Machine and Deep Learning techniques for multi-class classification and provides a comprehensive benchmark, emphasizing the best results in terms of three commonly used performance metrics (i.e., accuracy, precision, and recall). We train and test our models on a dataset consisting of annotated time series from real-world data collected by the Advanced Laser Interferometer GW Observatory (LIGO). We empirically show that the best overall accuracy is obtained by the proposed DeepWaves Ensemble, followed close by the ShallowWaves Ensemble.
Fast and Robust Sparsity-Aware Block Diagonal Representation
Dec 02, 2023The block diagonal structure of an affinity matrix is a commonly desired property in cluster analysis because it represents clusters of feature vectors by non-zero coefficients that are concentrated in blocks. However, recovering a block diagonal affinity matrix is challenging in real-world applications, in which the data may be subject to outliers and heavy-tailed noise that obscure the hidden cluster structure. To address this issue, we first analyze the effect of different fundamental outlier types in graph-based cluster analysis. A key idea that simplifies the analysis is to introduce a vector that represents a block diagonal matrix as a piece-wise linear function of the similarity coefficients that form the affinity matrix. We reformulate the problem as a robust piece-wise linear fitting problem and propose a Fast and Robust Sparsity-Aware Block Diagonal Representation (FRS-BDR) method, which jointly estimates cluster memberships and the number of blocks. Comprehensive experiments on a variety of real-world applications demonstrate the effectiveness of FRS-BDR in terms of clustering accuracy, robustness against corrupted features, computation time and cluster enumeration performance.
GRAPE-S: Near Real-Time Coalition Formation for Multiple Service Collectives
Oct 19, 2023Robotic collectives for military and disaster response applications require coalition formation algorithms to partition robots into appropriate task teams. Collectives' missions will often incorporate tasks that require multiple high-level robot behaviors or services, which coalition formation must accommodate. The highly dynamic and unstructured application domains also necessitate that coalition formation algorithms produce near optimal solutions (i.e., >95% utility) in near real-time (i.e., <5 minutes) with very large collectives (i.e., hundreds of robots). No previous coalition formation algorithm satisfies these requirements. An initial evaluation found that traditional auction-based algorithms' runtimes are too long, even though the centralized simulator incorporated ideal conditions unlikely to occur in real-world deployments (i.e., synchronization across robots and perfect, instantaneous communication). The hedonic game-based GRAPE algorithm can produce solutions in near real-time, but cannot be applied to multiple service collectives. This manuscript integrates GRAPE and a services model, producing GRAPE-S and Pair-GRAPE-S. These algorithms and two auction baselines were evaluated using a centralized simulator with up to 1000 robots, and via the largest distributed coalition formation simulated evaluation to date, with up to 500 robots. The evaluations demonstrate that auctions transfer poorly to distributed collectives, resulting in excessive runtimes and low utility solutions. GRAPE-S satisfies the target domains' coalition formation requirements, producing near optimal solutions in near real-time, and Pair-GRAPE-S more than satisfies the domain requirements, producing optimal solutions in near real-time. GRAPE-S and Pair-GRAPE-S are the first algorithms demonstrated to support near real-time coalition formation for very large, distributed collectives with multiple services.
Robust Localization and Tracking of UAVs in OTFS-based Networks
Nov 29, 2023We consider the problem of accurately localizing N unmanned aerial vehicles (UAV) in 3D space where the UAVs are part of a swarm and communicate with each other through orthogonal time-frequency space (OTFS) modulated signals. Each receiving UAV estimates the multipath wireless channel on each link formed by the line-of-sight (LoS) transmission and by the single reflections from the remaining N-2 UAVs. The estimated power delay profiles are communicated to an edge server, which is in charge of computing the exact location and speed of the UAVs. To obtain the UAVs locations and velocities, we propose an iterative algorithm, named Turbo Iterative Positioning (TIP), which, using a belief-propagation approach, effectively exploits the time difference of arrival (TDoA) measurements between the LoS and the non-LoS paths. Enabling a full cold start (no prior knowledge), our solution first maps each TDoA's profile element to a specific ID of the reflecting UAV's. The Doppler shifts measured by the OTFS receivers associated with each path are also used to estimate the UAV's velocities. The localization of the N UAVs is then derived via gradient descent optimization, with the aid of turbo-like iterations that can progressively correct some of the residual errors in the initial ID mapping operation. Our numerical results, obtained also using real-world traces, show how the multipath links are beneficial to achieving very accurate localization and speed of all UAVs, even with a limited delay-Doppler resolution. Robustness of our scheme is proven by its performance approaching the Cramer-Rao bound.
Lag-Llama: Towards Foundation Models for Time Series Forecasting
Oct 12, 2023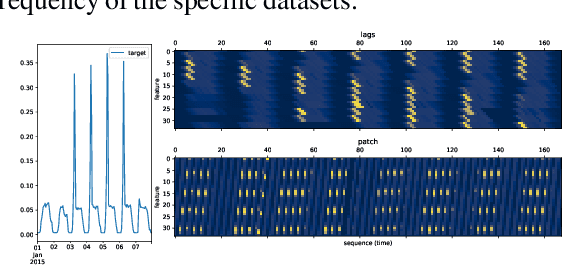
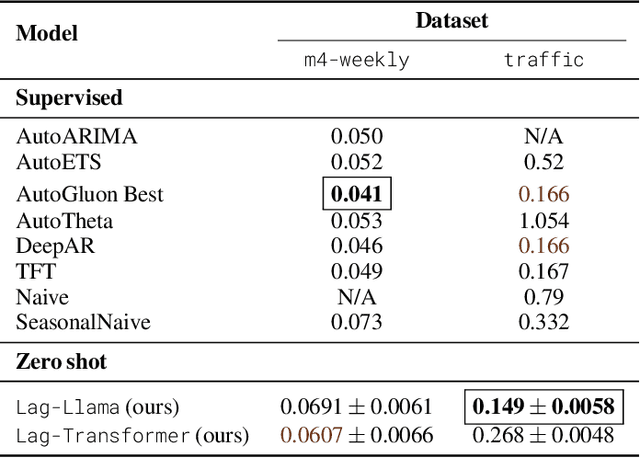
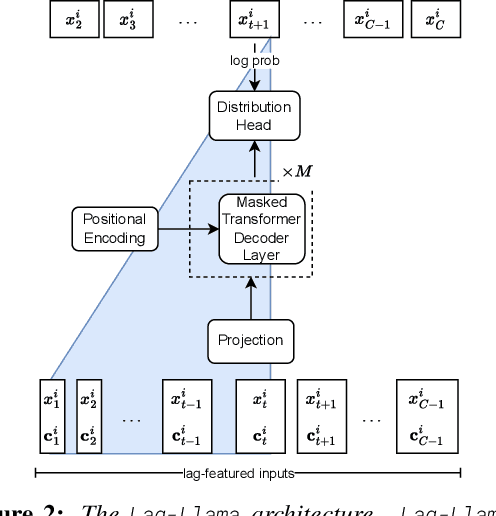
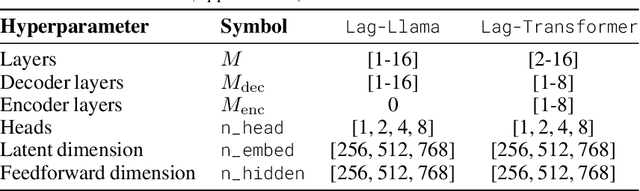
Aiming to build foundation models for time-series forecasting and study their scaling behavior, we present here our work-in-progress on Lag-Llama, a general-purpose univariate probabilistic time-series forecasting model trained on a large collection of time-series data. The model shows good zero-shot prediction capabilities on unseen "out-of-distribution" time-series datasets, outperforming supervised baselines. We use smoothly broken power-laws to fit and predict model scaling behavior. The open source code is made available at https://github.com/kashif/pytorch-transformer-ts.
MACE: A Multi-pattern Accommodated and Efficient Anomaly Detection Method in the Frequency Domain
Nov 26, 2023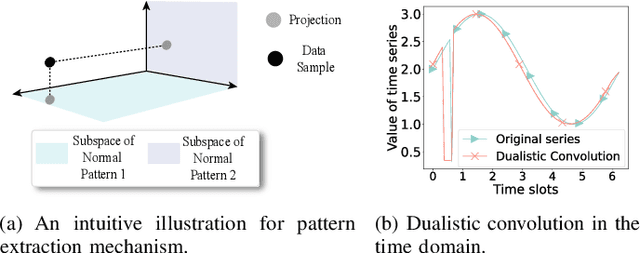
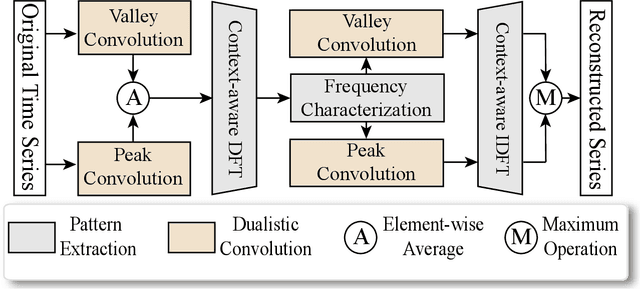
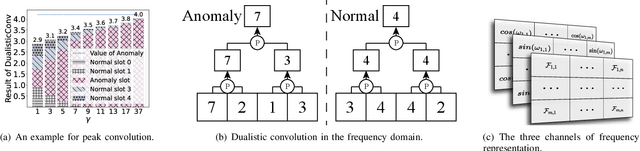
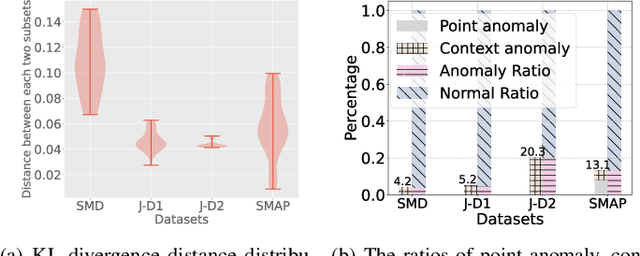
Anomaly detection significantly enhances the robustness of cloud systems. While neural network-based methods have recently demonstrated strong advantages, they encounter practical challenges in cloud environments: the contradiction between the impracticality of maintaining a unique model for each service and the limited ability of dealing with diverse normal patterns by a unified model, as well as issues with handling heavy traffic in real time and short-term anomaly detection sensitivity. Thus, we propose MACE, a Multi-pattern Accommodated and efficient Anomaly detection method in the frequency domain for time series anomaly detection. There are three novel characteristics of it: (i) a pattern extraction mechanism excelling at handling diverse normal patterns, which enables the model to identify anomalies by examining the correlation between the data sample and its service normal pattern, instead of solely focusing on the data sample itself; (ii) a dualistic convolution mechanism that amplifies short-term anomalies in the time domain and hinders the reconstruction of anomalies in the frequency domain, which enlarges the reconstruction error disparity between anomaly and normality and facilitates anomaly detection; (iii) leveraging the sparsity and parallelism of frequency domain to enhance model efficiency. We theoretically and experimentally prove that using a strategically selected subset of Fourier bases can not only reduce computational overhead but is also profit to distinguish anomalies, compared to using the complete spectrum. Moreover, extensive experiments demonstrate MACE's effectiveness in handling diverse normal patterns with a unified model and it achieves state-of-the-art performance with high efficiency. \end{abstract}
Open-Set Multivariate Time-Series Anomaly Detection
Oct 18, 2023Numerous methods for time series anomaly detection (TSAD) methods have emerged in recent years. Most existing methods are unsupervised and assume the availability of normal training samples only, while few supervised methods have shown superior performance by incorporating labeled anomalous samples in the training phase. However, certain anomaly types are inherently challenging for unsupervised methods to differentiate from normal data, while supervised methods are constrained to detecting anomalies resembling those present during training, failing to generalize to unseen anomaly classes. This paper is the first attempt in providing a novel approach for the open-set TSAD problem, in which a small number of labeled anomalies from a limited class of anomalies are visible in the training phase, with the objective of detecting both seen and unseen anomaly classes in the test phase. The proposed method, called Multivariate Open-Set timeseries Anomaly Detection (MOSAD) consists of three primary modules: a Feature Extractor to extract meaningful time-series features; a Multi-head Network consisting of Generative-, Deviation-, and Contrastive heads for capturing both seen and unseen anomaly classes; and an Anomaly Scoring module leveraging the insights of the three heads to detect anomalies. Extensive experiments on three real-world datasets consistently show that our approach surpasses existing methods under various experimental settings, thus establishing a new state-of-the-art performance in the TSAD field.
DeepDR: Deep Structure-Aware RGB-D Inpainting for Diminished Reality
Dec 01, 2023Diminished reality (DR) refers to the removal of real objects from the environment by virtually replacing them with their background. Modern DR frameworks use inpainting to hallucinate unobserved regions. While recent deep learning-based inpainting is promising, the DR use case is complicated by the need to generate coherent structure and 3D geometry (i.e., depth), in particular for advanced applications, such as 3D scene editing. In this paper, we propose DeepDR, a first RGB-D inpainting framework fulfilling all requirements of DR: Plausible image and geometry inpainting with coherent structure, running at real-time frame rates, with minimal temporal artifacts. Our structure-aware generative network allows us to explicitly condition color and depth outputs on the scene semantics, overcoming the difficulty of reconstructing sharp and consistent boundaries in regions with complex backgrounds. Experimental results show that the proposed framework can outperform related work qualitatively and quantitatively.