 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Training Reinforcement Learning Agents and Humans With Difficulty-Conditioned Generators
Dec 04, 2023
We adapt Parameterized Environment Response Model (PERM), a method for training both Reinforcement Learning (RL) Agents and human learners in parameterized environments by directly modeling difficulty and ability. Inspired by Item Response Theory (IRT), PERM aligns environment difficulty with individual ability, creating a Zone of Proximal Development-based curriculum. Remarkably, PERM operates without real-time RL updates and allows for offline training, ensuring its adaptability across diverse students. We present a two-stage training process that capitalizes on PERM's adaptability, and demonstrate its effectiveness in training RL agents and humans in an empirical study.
NovoMol: Recurrent Neural Network for Orally Bioavailable Drug Design and Validation on PDGFRα Receptor
Dec 03, 2023Longer timelines and lower success rates of drug candidates limit the productivity of clinical trials in the pharmaceutical industry. Promising de novo drug design techniques help solve this by exploring a broader chemical space, efficiently generating new molecules, and providing improved therapies. However, optimizing for molecular characteristics found in approved oral drugs remains a challenge, limiting de novo usage. In this work, we propose NovoMol, a novel de novo method using recurrent neural networks to mass-generate drug molecules with high oral bioavailability, increasing clinical trial time efficiency. Molecules were optimized for desirable traits and ranked using the quantitative estimate of drug-likeness (QED). Generated molecules meeting QED's oral bioavailability threshold were used to retrain the neural network, and, after five training cycles, 76% of generated molecules passed this strict threshold and 96% passed the traditionally used Lipinski's Rule of Five. The trained model was then used to generate specific drug candidates for the cancer-related PDGFR{\alpha} receptor and 44% of generated candidates had better binding affinity than the current state-of-the-art drug, Imatinib (with a receptor binding affinity of -9.4 kcal/mol), and the best-generated candidate at -12.9 kcal/mol. NovoMol provides a time/cost-efficient AI-based de novo method offering promising drug candidates for clinical trials.
Spectral Statistics of the Sample Covariance Matrix for High Dimensional Linear Gaussians
Dec 10, 2023Performance of ordinary least squares(OLS) method for the \emph{estimation of high dimensional stable state transition matrix} $A$(i.e., spectral radius $\rho(A)<1$) from a single noisy observed trajectory of the linear time invariant(LTI)\footnote{Linear Gaussian (LG) in Markov chain literature} system $X_{-}:(x_0,x_1, \ldots,x_{N-1})$ satisfying \begin{equation} x_{t+1}=Ax_{t}+w_{t}, \hspace{10pt} \text{ where } w_{t} \thicksim N(0,I_{n}), \end{equation} heavily rely on negative moments of the sample covariance matrix: $(X_{-}X_{-}^{*})=\sum_{i=0}^{N-1}x_{i}x_{i}^{*}$ and singular values of $EX_{-}^{*}$, where $E$ is a rectangular Gaussian ensemble $E=[w_0, \ldots, w_{N-1}]$. Negative moments requires sharp estimates on all the eigenvalues $\lambda_{1}\big(X_{-}X_{-}^{*}\big) \geq \ldots \geq \lambda_{n}\big(X_{-}X_{-}^{*}\big) \geq 0$. Leveraging upon recent results on spectral theorem for non-Hermitian operators in \cite{naeem2023spectral}, along with concentration of measure phenomenon and perturbation theory(Gershgorins' and Cauchys' interlacing theorem) we show that only when $A=A^{*}$, typical order of $\lambda_{j}\big(X_{-}X_{-}^{*}\big) \in \big[N-n\sqrt{N}, N+n\sqrt{N}\big]$ for all $j \in [n]$. However, in \emph{high dimensions} when $A$ has only one distinct eigenvalue $\lambda$ with geometric multiplicity of one, then as soon as eigenvalue leaves \emph{complex half unit disc}, largest eigenvalue suffers from curse of dimensionality: $\lambda_{1}\big(X_{-}X_{-}^{*}\big)=\Omega\big( \lfloor\frac{N}{n}\rfloor e^{\alpha_{\lambda}n} \big)$, while smallest eigenvalue $\lambda_{n}\big(X_{-}X_{-}^{*}\big) \in (0, N+\sqrt{N}]$. Consequently, OLS estimator incurs a \emph{phase transition} and becomes \emph{transient: increasing iteration only worsens estimation error}, all of this happening when the dynamics are generated from stable systems.
Self Attention with Temporal Prior: Can We Learn More from Arrow of Time?
Oct 29, 2023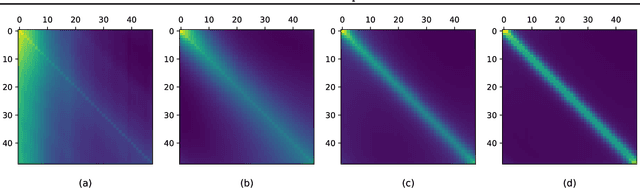

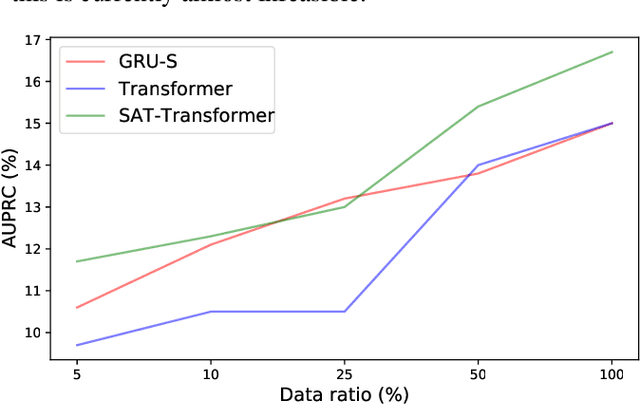
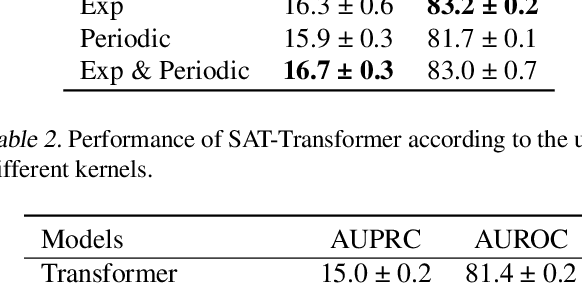
Many of diverse phenomena in nature often inherently encode both short and long term temporal dependencies, short term dependencies especially resulting from the direction of flow of time. In this respect, we discovered experimental evidences suggesting that {\it interrelations} of these events are higher for closer time stamps. However, to be able for attention based models to learn these regularities in short term dependencies, it requires large amounts of data which are often infeasible. This is due to the reason that, while they are good at learning piece wised temporal dependencies, attention based models lack structures that encode biases in time series. As a resolution, we propose a simple and efficient method that enables attention layers to better encode short term temporal bias of these data sets by applying learnable, adaptive kernels directly to the attention matrices. For the experiments, we chose various prediction tasks using Electronic Health Records (EHR) data sets since they are great examples that have underlying long and short term temporal dependencies. The results of our experiments show exceptional classification results compared to best performing models on most of the task and data sets.
Action Scene Graphs for Long-Form Understanding of Egocentric Videos
Dec 06, 2023We present Egocentric Action Scene Graphs (EASGs), a new representation for long-form understanding of egocentric videos. EASGs extend standard manually-annotated representations of egocentric videos, such as verb-noun action labels, by providing a temporally evolving graph-based description of the actions performed by the camera wearer, including interacted objects, their relationships, and how actions unfold in time. Through a novel annotation procedure, we extend the Ego4D dataset by adding manually labeled Egocentric Action Scene Graphs offering a rich set of annotations designed for long-from egocentric video understanding. We hence define the EASG generation task and provide a baseline approach, establishing preliminary benchmarks. Experiments on two downstream tasks, egocentric action anticipation and egocentric activity summarization, highlight the effectiveness of EASGs for long-form egocentric video understanding. We will release the dataset and the code to replicate experiments and annotations.
The optimization, design and performance of the FBCM23 ASIC for the upgraded CMS beam monitoring system
Dec 05, 2023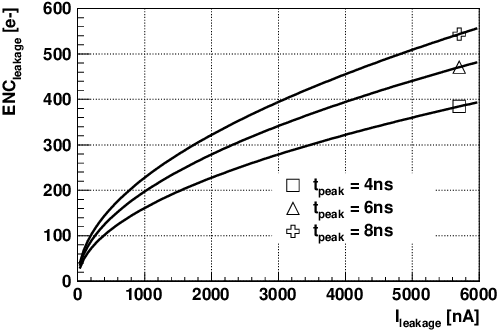
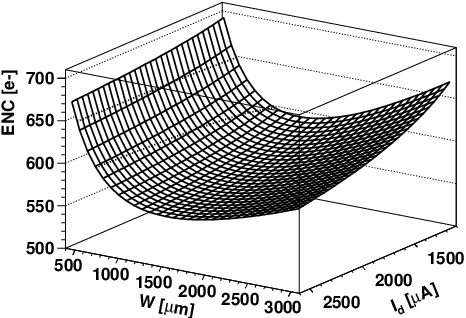
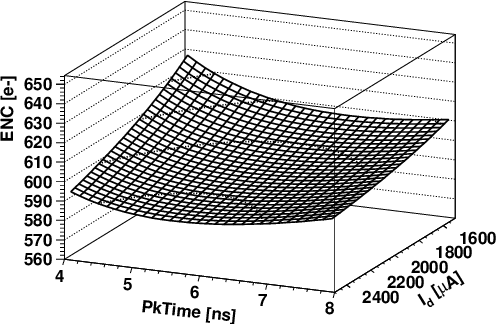
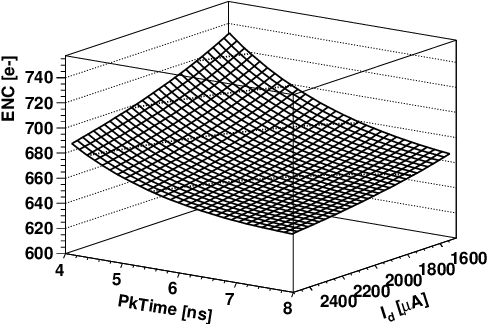
We present the development of the FBCM23 ASIC designed for the Phase-II upgrade of the Fast Beam Condition Monitoring (FBCM) system built at the CMS experiment which will replace the present luminometer based on the BCM1F ASIC [1]. The FBCM system should provide reliable luminosity measurement with 1 ns time resolution enabling the detection of beam-induced background. The FBCM23 ASIC comprises 6 channels of the fast front-end amplifier working in transimpedance configuration followed by CR-RC$^3$ shaper and leading edge discriminator. The paper will show the optimization of the design, overall architecture, and the detailed implementation in a CMOS 65 nm process as well as preliminary electrical performance.
Supervised Learning Based Real-Time Adaptive Beamforming On-board Multibeam Satellites
Nov 02, 2023Satellite communications (SatCom) are crucial for global connectivity, especially in the era of emerging technologies like 6G and narrowing the digital divide. Traditional SatCom systems struggle with efficient resource management due to static multibeam configurations, hindering quality of service (QoS) amidst dynamic traffic demands. This paper introduces an innovative solution - real-time adaptive beamforming on multibeam satellites with software-defined payloads in geostationary orbit (GEO). Utilizing a Direct Radiating Array (DRA) with circular polarization in the 17.7 - 20.2 GHz band, the paper outlines DRA design and a supervised learning-based algorithm for on-board beamforming. This adaptive approach not only meets precise beam projection needs but also dynamically adjusts beamwidth, minimizes sidelobe levels (SLL), and optimizes effective isotropic radiated power (EIRP).
Model Extraction Attacks Revisited
Dec 08, 2023Model extraction (ME) attacks represent one major threat to Machine-Learning-as-a-Service (MLaaS) platforms by ``stealing'' the functionality of confidential machine-learning models through querying black-box APIs. Over seven years have passed since ME attacks were first conceptualized in the seminal work. During this period, substantial advances have been made in both ME attacks and MLaaS platforms, raising the intriguing question: How has the vulnerability of MLaaS platforms to ME attacks been evolving? In this work, we conduct an in-depth study to answer this critical question. Specifically, we characterize the vulnerability of current, mainstream MLaaS platforms to ME attacks from multiple perspectives including attack strategies, learning techniques, surrogate-model design, and benchmark tasks. Many of our findings challenge previously reported results, suggesting emerging patterns of ME vulnerability. Further, by analyzing the vulnerability of the same MLaaS platforms using historical datasets from the past four years, we retrospectively characterize the evolution of ME vulnerability over time, leading to a set of interesting findings. Finally, we make suggestions about improving the current practice of MLaaS in terms of attack robustness. Our study sheds light on the current state of ME vulnerability in the wild and points to several promising directions for future research.
An Autonomous Driving model with BEV-V2X Perception, Trajectory Prediction and Driving Planning in Complex Traffic Intersections
Dec 08, 2023The comprehensiveness of vehicle-to-everything (V2X) recognition enriches and holistically shapes the global Birds-Eye-View (BEV) perception, incorporating rich semantics and integrating driving scene information, thereby serving features of trajectory prediction, decision-making and driving planning. Utilizing V2X message sets to form BEV format proves to be an effective perception method for connected and automated vehicles (CAVs). Specifically, MAP, SPAT and RSI data contributes to the achievement of road connectivity, synchronized traffic signal navigation and obstacle warning. Moreover, using time-sequential BSMs information from multiple vehicles allows for the perception of current state and the prediction of future trajectories. Therefore, this paper develops a comprehensive autonomous driving model that relies on BEV-V2X perception, Interacting Multiple model Unscented Kalman Filter (IMM-UKF)-based trajectory prediction, and deep reinforcement learning (DRL)-based decision making and planing. We establish a DRL environment with reward-shaping methods to formulate a unified set of optimal driving behaviors that encompass obstacle avoidance, lane changes, overtaking, turning maneuver, and synchronized traffic signal navigation. Consequently, a complex traffic intersection scenario was simulated, and the well-trained model was applied for driving control. The observed driving behavior closely resembled that of an experienced driver, exhibiting anticipatory actions and revealing notable operational highlights of driving policy.
Synthesizing Traffic Datasets using Graph Neural Networks
Dec 08, 2023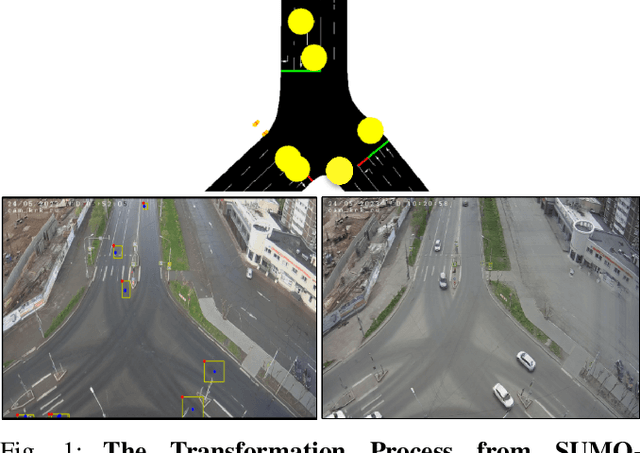
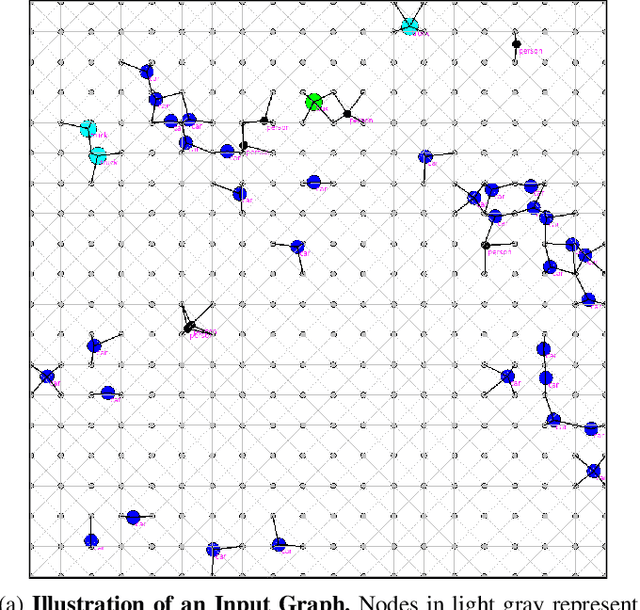
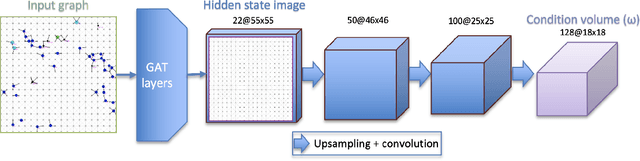
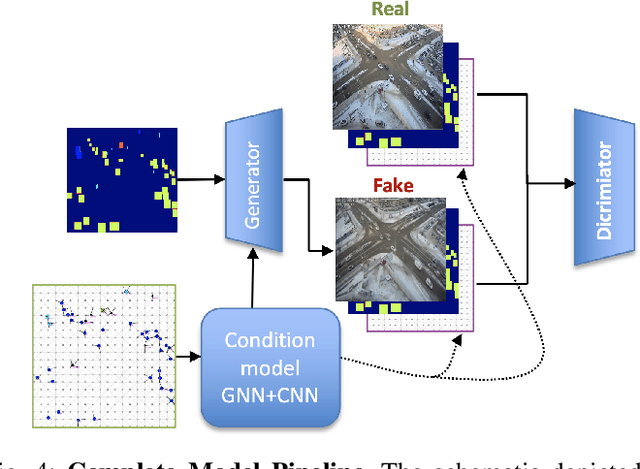
Traffic congestion in urban areas presents significant challenges, and Intelligent Transportation Systems (ITS) have sought to address these via automated and adaptive controls. However, these systems often struggle to transfer simulated experiences to real-world scenarios. This paper introduces a novel methodology for bridging this `sim-real' gap by creating photorealistic images from 2D traffic simulations and recorded junction footage. We propose a novel image generation approach, integrating a Conditional Generative Adversarial Network with a Graph Neural Network (GNN) to facilitate the creation of realistic urban traffic images. We harness GNNs' ability to process information at different levels of abstraction alongside segmented images for preserving locality data. The presented architecture leverages the power of SPADE and Graph ATtention (GAT) network models to create images based on simulated traffic scenarios. These images are conditioned by factors such as entity positions, colors, and time of day. The uniqueness of our approach lies in its ability to effectively translate structured and human-readable conditions, encoded as graphs, into realistic images. This advancement contributes to applications requiring rich traffic image datasets, from data augmentation to urban traffic solutions. We further provide an application to test the model's capabilities, including generating images with manually defined positions for various entities.