 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A radiomics approach to analyze cardiac alterations in hypertension
Jul 21, 2020
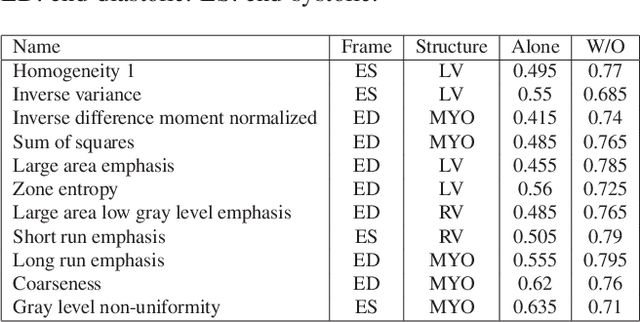
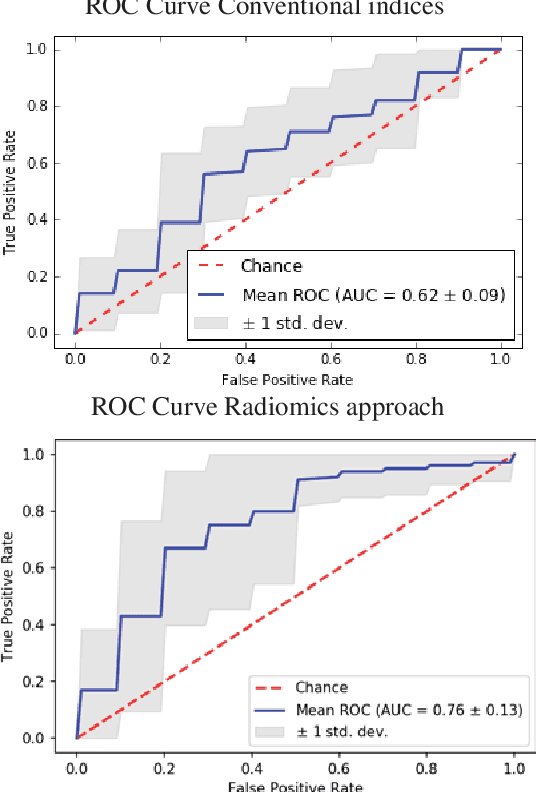
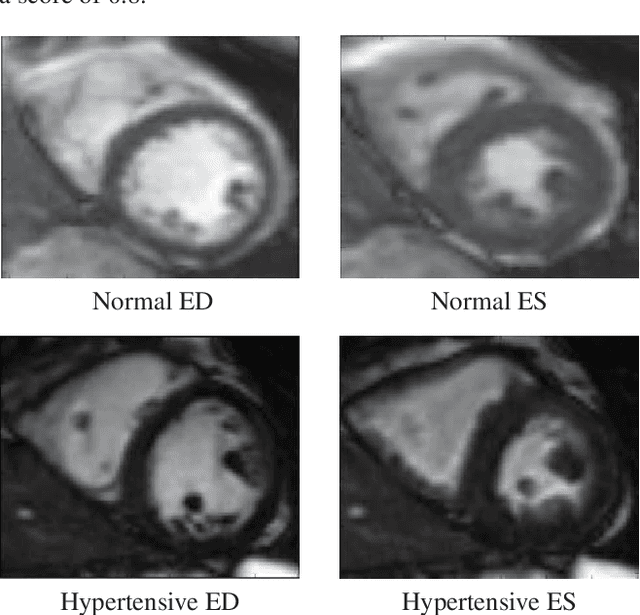
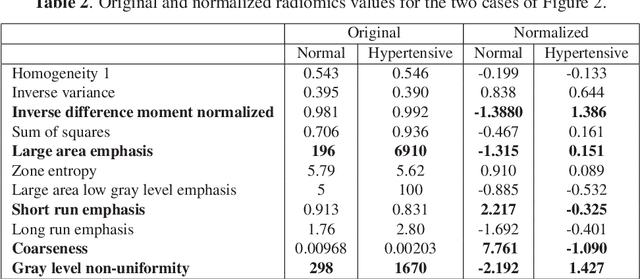
Hypertension is a medical condition that is well-established as a risk factor for many major diseases. For example, it can cause alterations in the cardiac structure and function over time that can lead to heart related morbidity and mortality. However, at the subclinical stage, these changes are subtle and cannot be easily captured using conventional cardiovascular indices calculated from clinical cardiac imaging. In this paper, we describe a radiomics approach for identifying intermediate imaging phenotypes associated with hypertension. The method combines feature selection and machine learning techniques to identify the most subtle as well as complex structural and tissue changes in hypertensive subgroups as compared to healthy individuals. Validation based on a sample of asymptomatic hearts that include both hypertensive and non-hypertensive cases demonstrate that the proposed radiomics model is capable of detecting intensity and textural changes well beyond the capabilities of conventional imaging phenotypes, indicating its potential for improved understanding of the longitudinal effects of hypertension on cardiovascular health and disease.
Self-Supervised Monocular Depth Estimation: Solving the Dynamic Object Problem by Semantic Guidance
Jul 21, 2020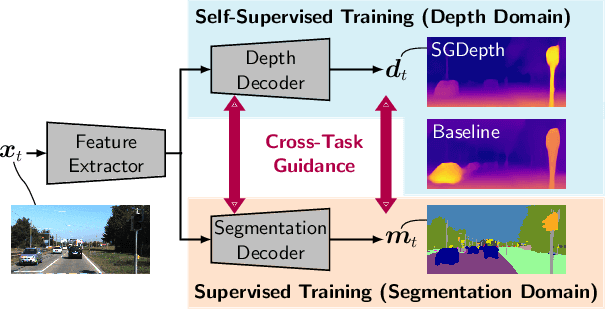
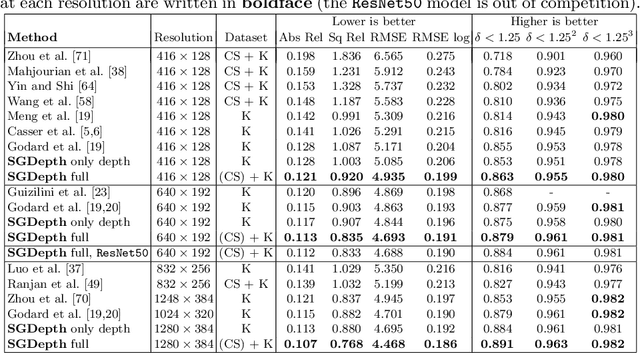
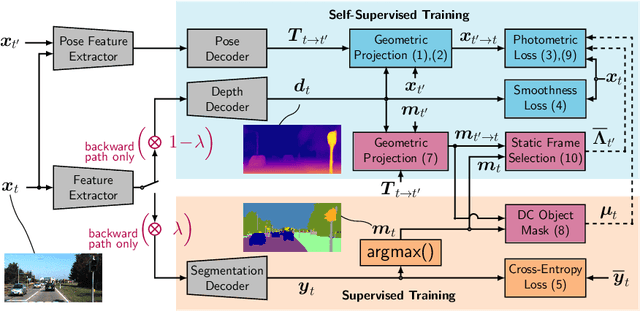
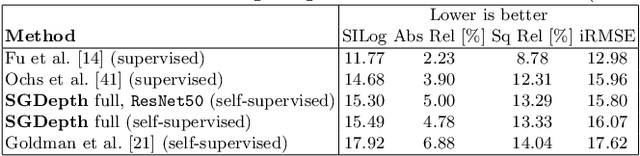
Self-supervised monocular depth estimation presents a powerful method to obtain 3D scene information from single camera images, which is trainable on arbitrary image sequences without requiring depth labels, e.g., from a LiDAR sensor. In this work we present a new self-supervised semantically-guided depth estimation (SGDepth) method to deal with moving dynamic-class (DC) objects, such as moving cars and pedestrians, which violate the static-world assumptions typically made during training of such models. Specifically, we propose (i) mutually beneficial cross-domain training of (supervised) semantic segmentation and self-supervised depth estimation with task-specific network heads, (ii) a semantic masking scheme providing guidance to prevent moving DC objects from contaminating the photometric loss, and (iii) a detection method for frames with non-moving DC objects, from which the depth of DC objects can be learned. We demonstrate the performance of our method on several benchmarks, in particular on the Eigen split, where we exceed all baselines without test-time refinement.
A Spherical Hidden Markov Model for Semantics-Rich Human Mobility Modeling
Oct 05, 2020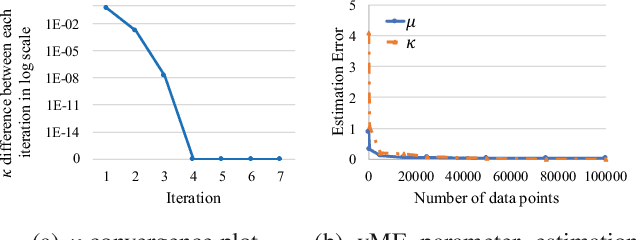
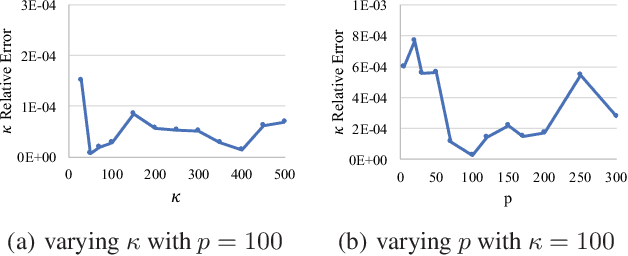
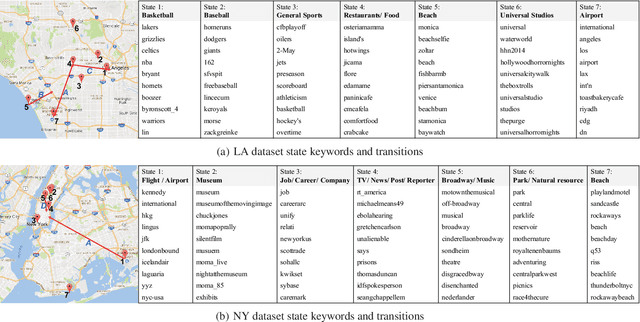
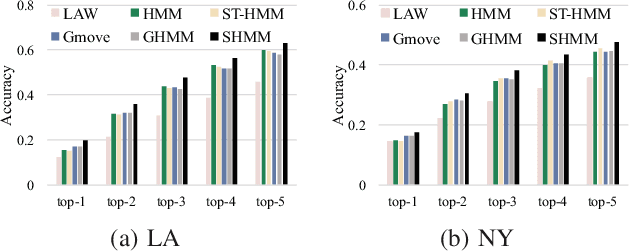
We study the problem of modeling human mobility from semantic trace data, wherein each GPS record in a trace is associated with a text message that describes the user's activity. Existing methods fall short in unveiling human movement regularities, because they either do not model the text data at all or suffer from text sparsity severely. We propose SHMM, a multi-modal spherical hidden Markov model for semantics-rich human mobility modeling. Under the hidden Markov assumption, SHMM models the generation process of a given trace by jointly considering the observed location, time, and text at each step of the trace. The distinguishing characteristic of SHMM is the text modeling part. We use fixed-size vector representations to encode the semantics of the text messages, and model the generation of the l2-normalized text embeddings on a unit sphere with the von Mises-Fisher (vMF) distribution. Compared with other alternatives like multi-variate Gaussian, our choice of the vMF distribution not only incurs much fewer parameters, but also better leverages the discriminative power of text embeddings in a directional metric space. The parameter inference for the vMF distribution is non-trivial since it involves functional inversion of ratios of Bessel functions. We theoretically prove that: 1) the classical Expectation-Maximization algorithm can work with vMF distributions; and 2) while closed-form solutions are hard to be obtained for the M-step, Newton's method is guaranteed to converge to the optimal solution with quadratic convergence rate. We have performed extensive experiments on both synthetic and real-life data. The results on synthetic data verify our theoretical analysis; while the results on real-life data demonstrate that SHMM learns meaningful semantics-rich mobility models, outperforms state-of-the-art mobility models for next location prediction, and incurs lower training cost.
P2ExNet: Patch-based Prototype Explanation Network
May 05, 2020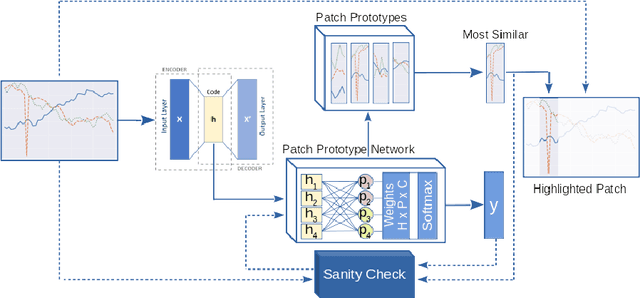
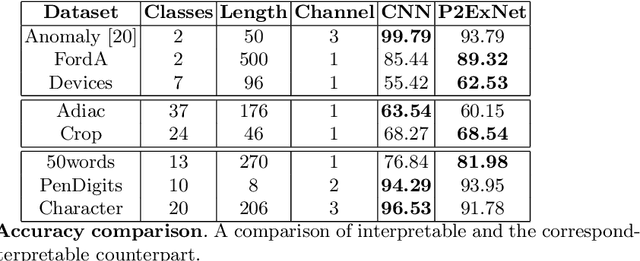

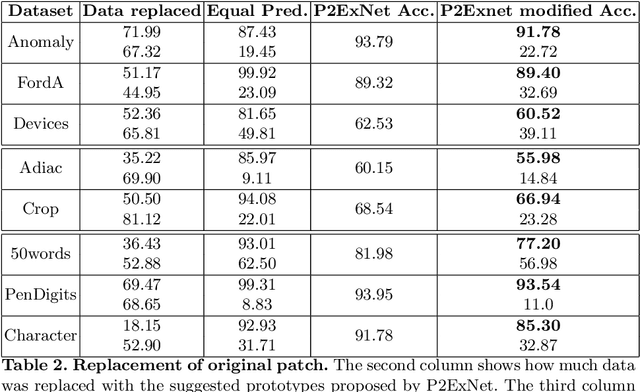
Deep learning methods have shown great success in several domains as they process a large amount of data efficiently, capable of solving complex classification, forecast, segmentation, and other tasks. However, they come with the inherent drawback of inexplicability limiting their applicability and trustworthiness. Although there exists work addressing this perspective, most of the existing approaches are limited to the image modality due to the intuitive and prominent concepts. Conversely, the concepts in the time-series domain are more complex and non-comprehensive but these and an explanation for the network decision are pivotal in critical domains like medical, financial, or industry. Addressing the need for an explainable approach, we propose a novel interpretable network scheme, designed to inherently use an explainable reasoning process inspired by the human cognition without the need of additional post-hoc explainability methods. Therefore, class-specific patches are used as they cover local concepts relevant to the classification to reveal similarities with samples of the same class. In addition, we introduce a novel loss concerning interpretability and accuracy that constraints P2ExNet to provide viable explanations of the data including relevant patches, their position, class similarities, and comparison methods without compromising accuracy. Analysis of the results on eight publicly available time-series datasets reveals that P2ExNet reaches comparable performance when compared to its counterparts while inherently providing understandable and traceable decisions.
Wound and episode level readmission risk or weeks to readmit: Why do patients get readmitted? How long does it take for a patient to get readmitted?
Oct 05, 2020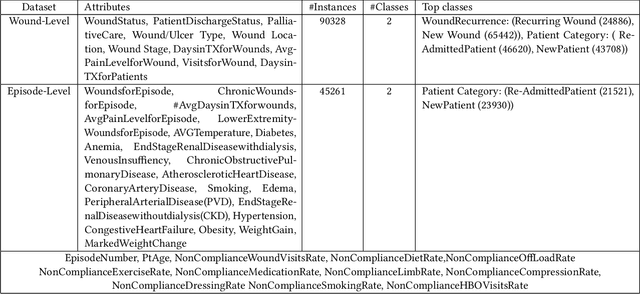
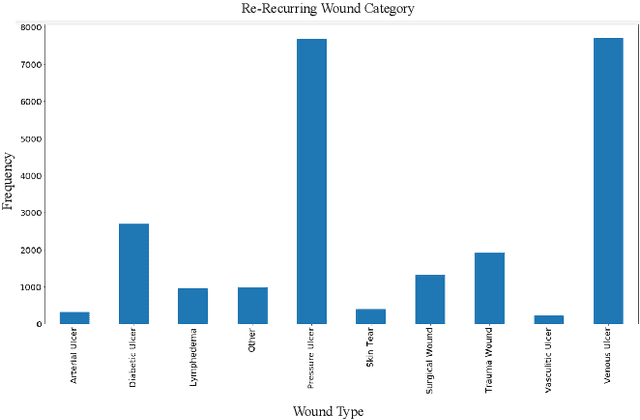
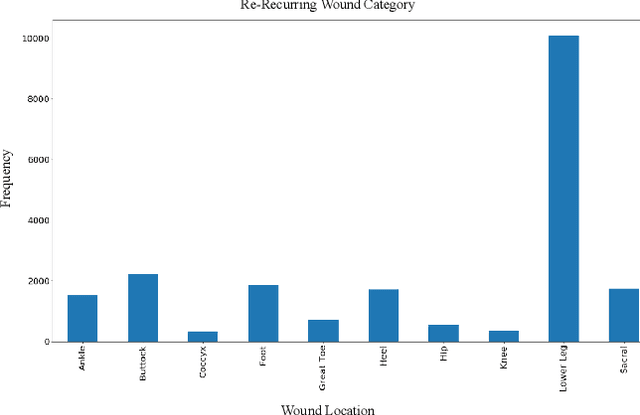

The Affordable care Act of 2010 had introduced Readmission reduction program in 2012 to reduce avoidable re-admissions to control rising healthcare costs. Wound care impacts 15 of medicare beneficiaries making it one of the major contributors of medicare health care cost. Health plans have been exploring proactive health care services that can focus on preventing wound recurrences and re-admissions to control the wound care costs. With rising costs of Wound care industry, it has become of paramount importance to reduce wound recurrences & patient re-admissions. What factors are responsible for a Wound to recur which ultimately lead to hospitalization or re-admission? Is there a way to identify the patients at risk of re-admission before the occurrence using data driven analysis? Patient re-admission risk management has become critical for patients suffering from chronic wounds such as diabetic ulcers, pressure ulcers, and vascular ulcers. Understanding the risk & the factors that cause patient readmission can help care providers and patients avoid wound recurrences. Our work focuses on identifying patients who are at high risk of re-admission & determining the time period with in which a patient might get re-admitted. Frequent re-admissions add financial stress to the patient & Health plan and deteriorate the quality of life of the patient. Having this information can allow a provider to set up preventive measures that can delay, if not prevent, patients' re-admission. On a combined wound & episode-level data set of patient's wound care information, our extended autoprognosis achieves a recall of 92 and a precision of 92 for the predicting a patient's re-admission risk. For new patient class, precision and recall are as high as 91 and 98, respectively. We are also able to predict the patient's discharge event for a re-admission event to occur through our model with a MAE of 2.3 weeks.
A Novel Ramp Metering Approach Based on Machine Learning and Historical Data
May 26, 2020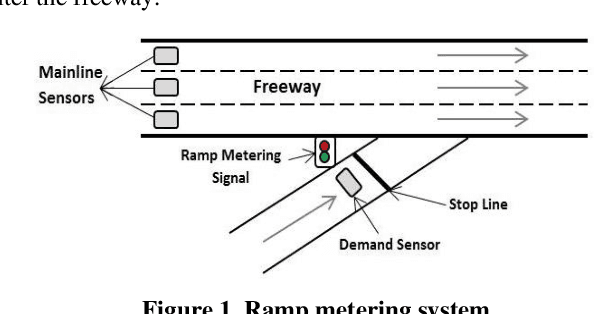
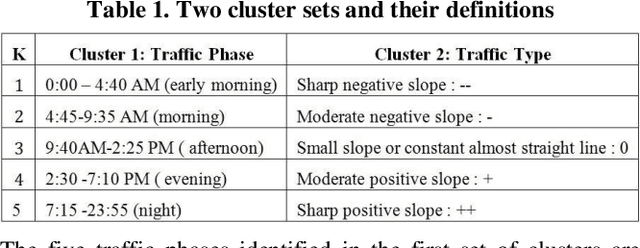
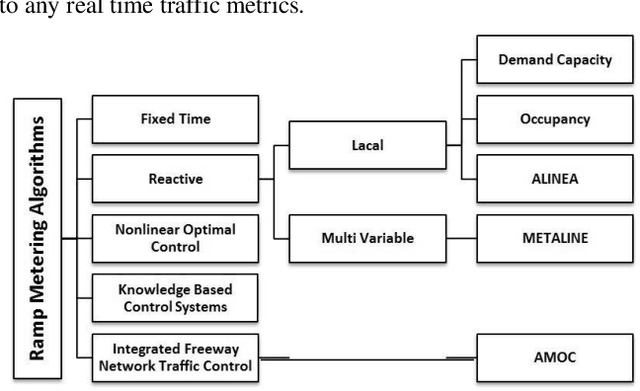
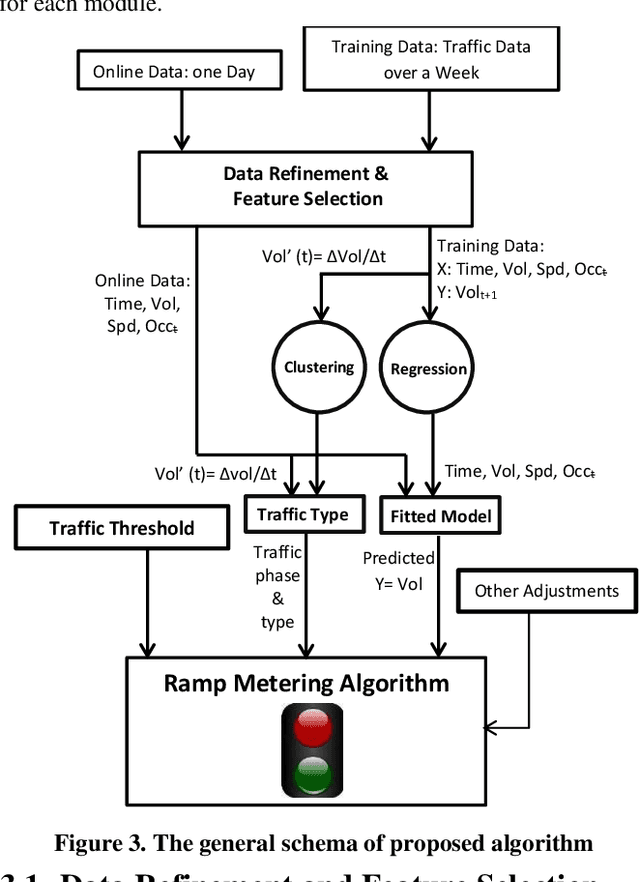
The random nature of traffic conditions on freeways can cause excessive congestions and irregularities in the traffic flow. Ramp metering is a proven effective method to maintain freeway efficiency under various traffic conditions. Creating a reliable and practical ramp metering algorithm that considers both critical traffic measures and historical data is still a challenging problem. In this study we use machine learning approaches to develop a novel real-time prediction model for ramp metering. We evaluate the potentials of our approach in providing promising results by comparing it with a baseline traffic-responsive ramp metering algorithm.
Online Exploration and Coverage Planning in Unknown Obstacle-Cluttered Environments
Jun 30, 2020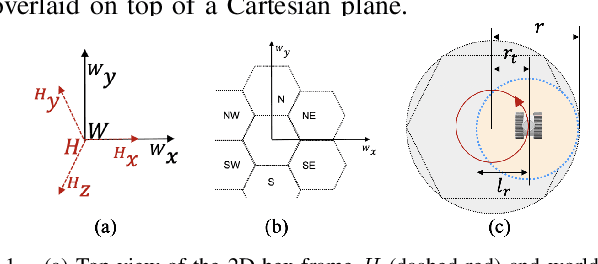
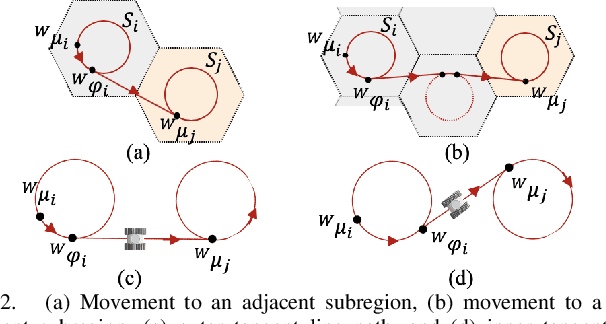
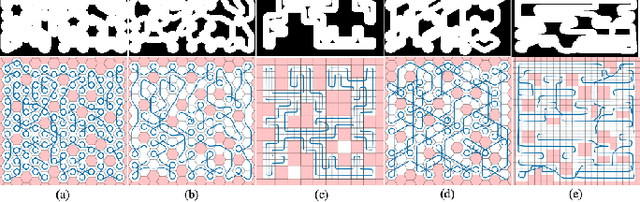
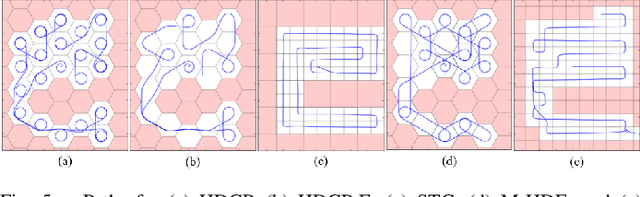
Online coverage planning can be useful in applications like field monitoring and search and rescue. Without prior information of the environment, achieving resolution-complete coverage considering the non-holonomic mobility constraints in commonly-used vehicles (e.g., wheeled robots) remains a challenge. In this paper, we propose a hierarchical, hex-decomposition-based coverage planning algorithm for unknown, obstacle-cluttered environments. The proposed approach ensures resolution-complete coverage, can be tuned to achieve fast exploration, and plans smooth paths for Dubins vehicles to follow at constant velocity in real-time. Gazebo simulations and hardware experiments with a non-holonomic wheeled robot show that our approach can successfully tradeoff between coverage and exploration speed and can outperform existing online coverage algorithms in terms of total covered area or exploration speed according to how it is tuned.
LiPo-LCD: Combining Lines and Points for Appearance-based Loop Closure Detection
Sep 03, 2020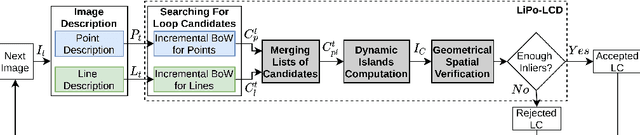

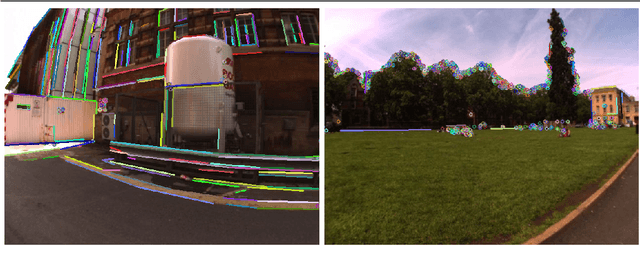
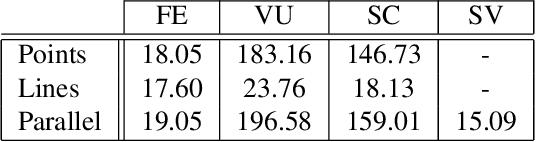
Visual SLAM approaches typically depend on loop closure detection to correct the inconsistencies that may arise during the map and camera trajectory calculations, typically making use of point features for detecting and closing the existing loops. In low-textured scenarios, however, it is difficult to find enough point features and, hence, the performance of these solutions drops drastically. An alternative for human-made scenarios, due to their structural regularity, is the use of geometrical cues such as straight segments, frequently present within these environments. Under this context, in this paper we introduce LiPo-LCD, a novel appearance-based loop closure detection method that integrates lines and points. Adopting the idea of incremental Bag-of-Binary-Words schemes, we build separate BoW models for each feature, and use them to retrieve previously seen images using a late fusion strategy. Additionally, a simple but effective mechanism, based on the concept of island, groups similar images close in time to reduce the image candidate search effort. A final step validates geometrically the loop candidates by incorporating the detected lines by means of a process comprising a line feature matching stage, followed by a robust spatial verification stage, now combining both lines and points. As it is reported in the paper, LiPo-LCD compares well with several state-of-the-art solutions for a number of datasets involving different environmental conditions.
Human and Multi-Agent collaboration in a human-MARL teaming framework
Jun 12, 2020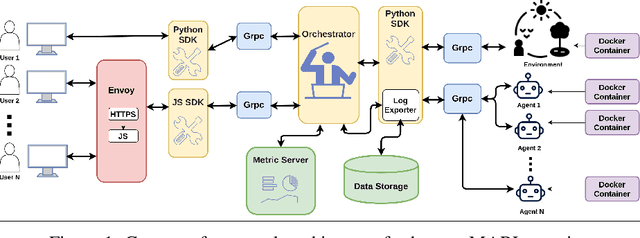
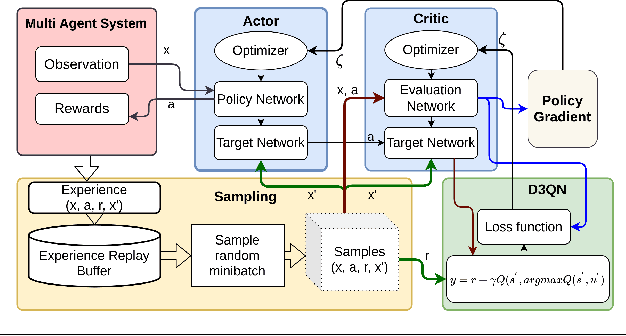
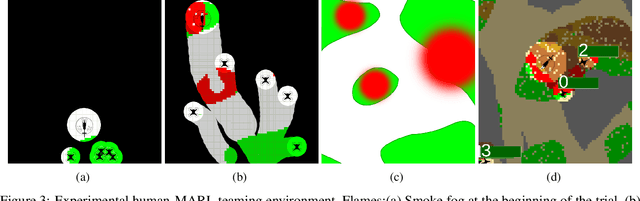
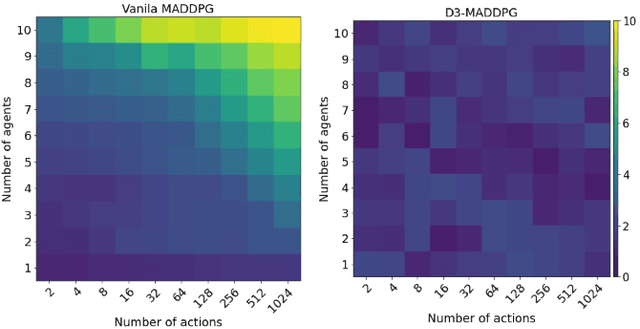
Collaborative multi-agent reinforcement learning (MARL) as a specific category of reinforcement learning provides effective results with agents learning from their observations, received rewards, and internal interactions between agents. However, centralized learning methods with a joint global policy in a highly dynamic environment present unique challenges in dealing with large amounts of information. This study proposes two innovative solutions to address the complexities of a collaboration between a human and multiple reinforcement learning (RL)-based agents (referred to thereafter as Human-MARL teaming) where the goals pursued cannot be achieved by a human alone or agents alone. The first innovation is the introduction of a new open-source MARL framework, called COGMENT, to unite humans and agents in real-time complex dynamic systems and efficiently leverage their interactions as a source of learning. The second innovation is our proposal of a new hybrid MARL method, named Dueling Double Deep Q learning MADDPG (D3-MADDPG) to allow agents to train decentralized policies parallelly in a joint centralized policy. This method can solve the overestimation problem in Q-learning methods of value-based MARL. We demonstrate these innovations by using a designed real-time environment with unmanned aerial vehicles driven by RL agents, collaborating with a human to fight fires. The team of RL agent drones autonomously look for fire seats and the human pilot douses the fires. The results of this study show that the proposed collaborative paradigm and the open-source framework leads to significant reductions in both human effort and exploration costs. Also, the results of the proposed hybrid MARL method shows that it effectively improves the learning process to achieve more reliable Q-values for each action, by decoupling the estimation between state value and advantage value.
Epidemic mitigation by statistical inference from contact tracing data
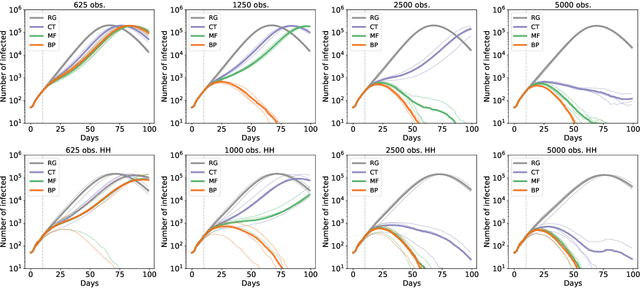
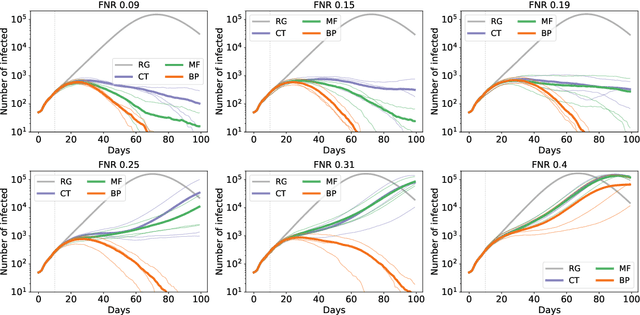
Sep 20, 2020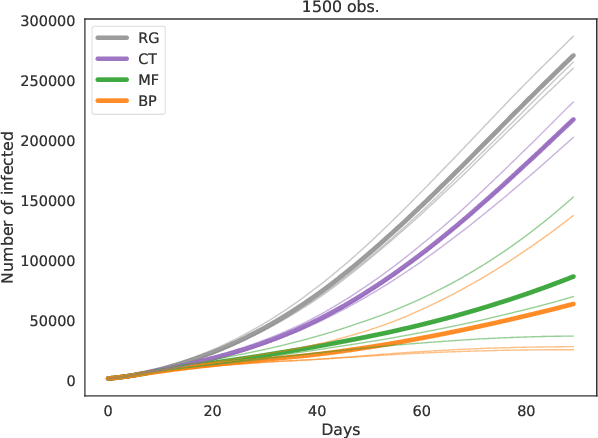

Contact-tracing is an essential tool in order to mitigate the impact of pandemic such as the COVID-19. In order to achieve efficient and scalable contact-tracing in real time, digital devices can play an important role. While a lot of attention has been paid to analyzing the privacy and ethical risks of the associated mobile applications, so far much less research has been devoted to optimizing their performance and assessing their impact on the mitigation of the epidemic. We develop Bayesian inference methods to estimate the risk that an individual is infected. This inference is based on the list of his recent contacts and their own risk levels, as well as personal information such as results of tests or presence of syndromes. We propose to use probabilistic risk estimation in order to optimize testing and quarantining strategies for the control of an epidemic. Our results show that in some range of epidemic spreading (typically when the manual tracing of all contacts of infected people becomes practically impossible, but before the fraction of infected people reaches the scale where a lock-down becomes unavoidable), this inference of individuals at risk could be an efficient way to mitigate the epidemic. Our approaches translate into fully distributed algorithms that only require communication between individuals who have recently been in contact. Such communication may be encrypted and anonymized and thus compatible with privacy preserving standards. We conclude that probabilistic risk estimation is capable to enhance performance of digital contact tracing and should be considered in the currently developed mobile applications.