 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
DeepNNK: Explaining deep models and their generalization using polytope interpolation
Jul 20, 2020
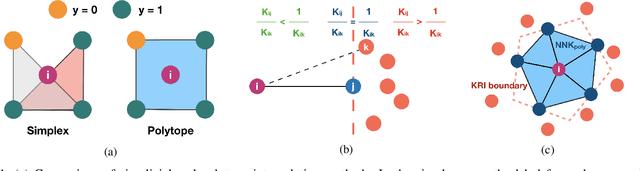
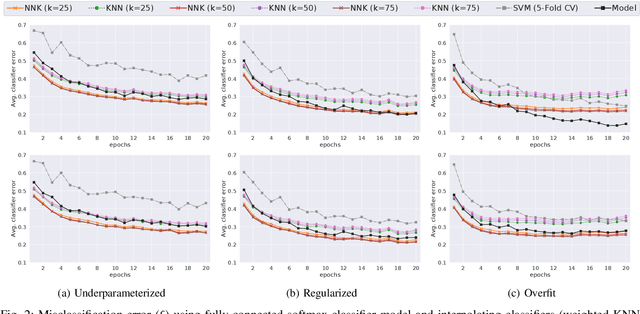
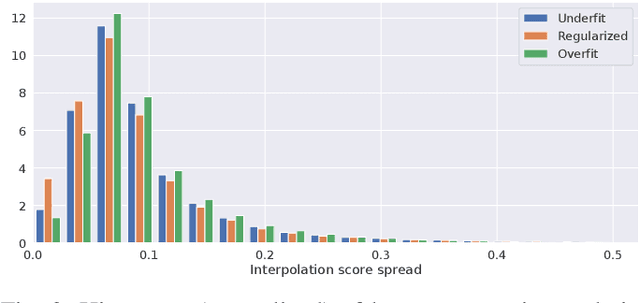
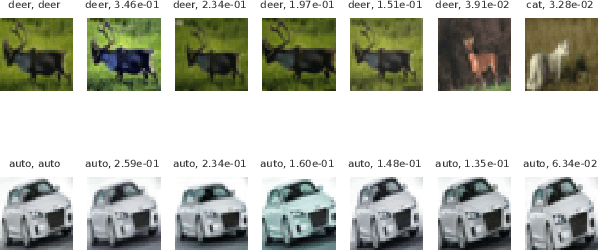
Modern machine learning systems based on neural networks have shown great success in learning complex data patterns while being able to make good predictions on unseen data points. However, the limited interpretability of these systems hinders further progress and application to several domains in the real world. This predicament is exemplified by time consuming model selection and the difficulties faced in predictive explainability, especially in the presence of adversarial examples. In this paper, we take a step towards better understanding of neural networks by introducing a local polytope interpolation method. The proposed Deep Non Negative Kernel regression (NNK) interpolation framework is non parametric, theoretically simple and geometrically intuitive. We demonstrate instance based explainability for deep learning models and develop a method to identify models with good generalization properties using leave one out estimation. Finally, we draw a rationalization to adversarial and generative examples which are inevitable from an interpolation view of machine learning.
Combining Machine Learning with Knowledge-Based Modeling for Scalable Forecasting and Subgrid-Scale Closure of Large, Complex, Spatiotemporal Systems
Feb 10, 2020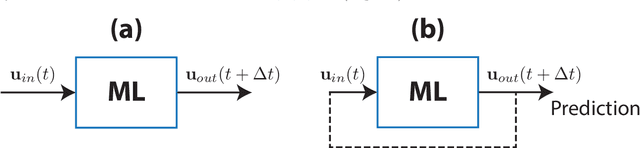
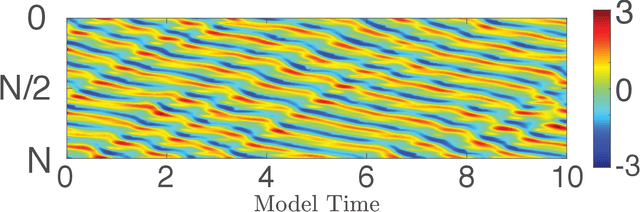
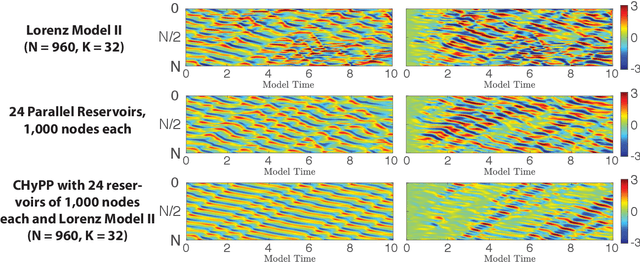
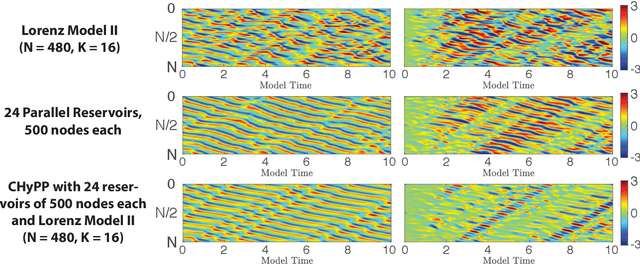
We consider the commonly encountered situation (e.g., in weather forecasting) where the goal is to predict the time evolution of a large, spatiotemporally chaotic dynamical system when we have access to both time series data of previous system states and an imperfect model of the full system dynamics. Specifically, we attempt to utilize machine learning as the essential tool for integrating the use of past data into predictions. In order to facilitate scalability to the common scenario of interest where the spatiotemporally chaotic system is very large and complex, we propose combining two approaches:(i) a parallel machine learning prediction scheme; and (ii) a hybrid technique, for a composite prediction system composed of a knowledge-based component and a machine-learning-based component. We demonstrate that not only can this method combining (i) and (ii) be scaled to give excellent performance for very large systems, but also that the length of time series data needed to train our multiple, parallel machine learning components is dramatically less than that necessary without parallelization. Furthermore, considering cases where computational realization of the knowledge-based component does not resolve subgrid-scale processes, our scheme is able to use training data to incorporate the effect of the unresolved short-scale dynamics upon the resolved longer-scale dynamics ("subgrid-scale closure").
Using a memory of motion to efficiently achieve visual predictive control tasks
Jan 31, 2020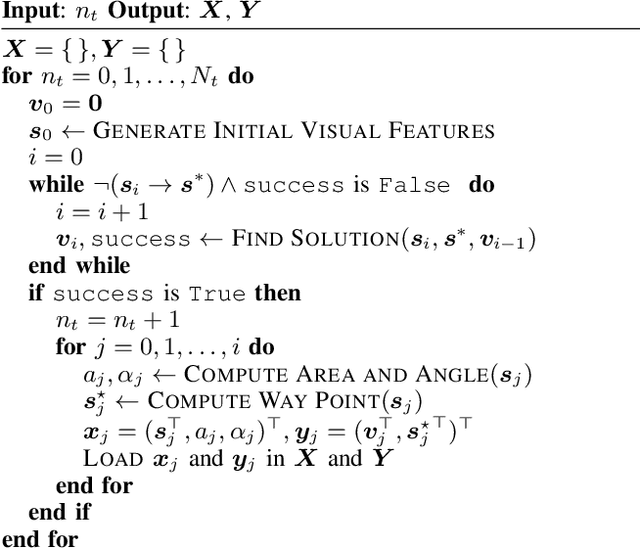
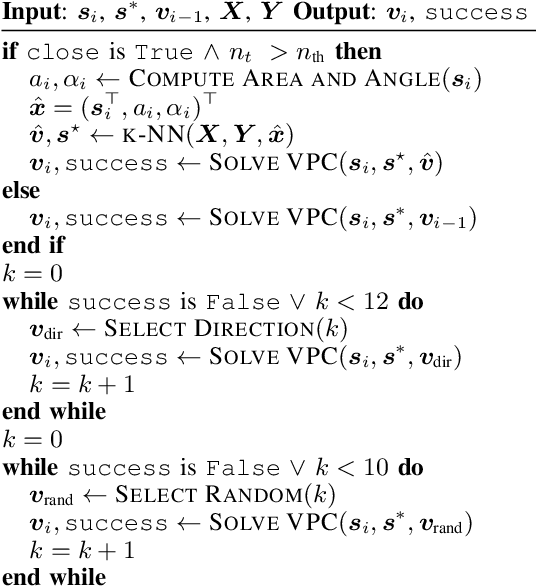
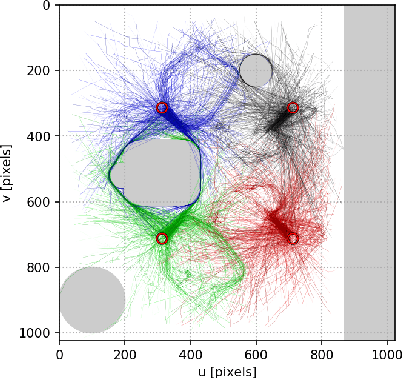
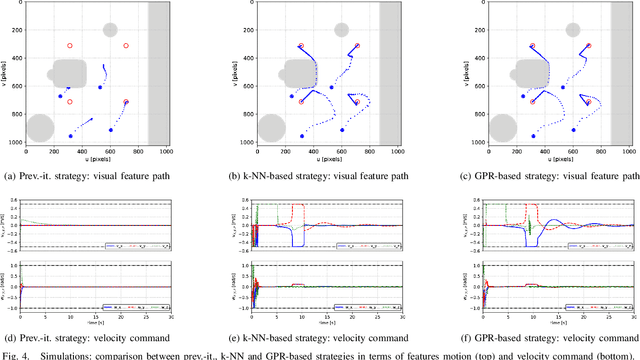
This paper addresses the problem of efficiently achieving visual predictive control tasks. To this end, a memory of motion, containing a set of trajectories built off-line, is used for leveraging precomputation and dealing with difficult visual tasks. Regression techniques, such as k-nearest neighbors and Gaussian process regression, are used to query the memory and provide on-line the control optimization process with a warm-start and way points. The proposed technique allows the robot to achieve difficult tasks and, at the same time, keep the execution time limited. Simulation and experimental results, carried out with a 7-axis manipulator, show the effectiveness of the approach.
CatGCN: Graph Convolutional Networks with Categorical Node Features
Sep 11, 2020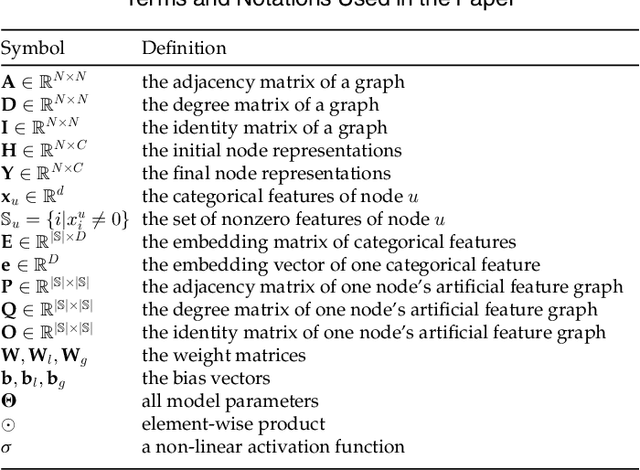
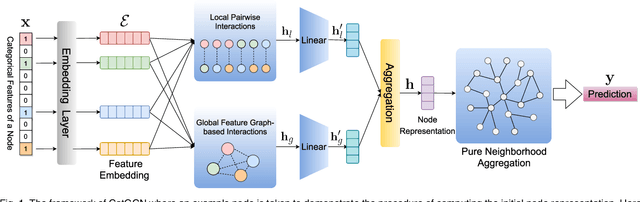
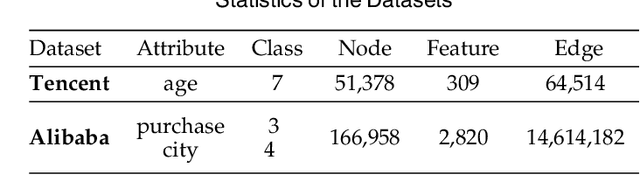
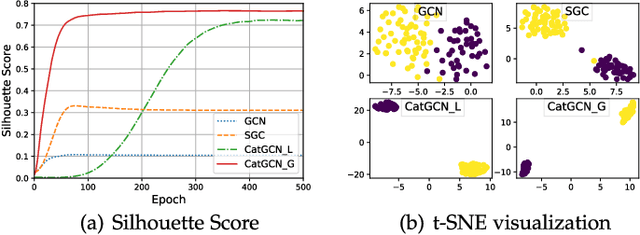
Recent studies on Graph Convolutional Networks (GCNs) reveal that the initial node representations (i.e., the node representations before the first-time graph convolution) largely affect the final model performance. However, when learning the initial representation for a node, most existing work linearly combines the embeddings of node features, without considering the interactions among the features (or feature embeddings). We argue that when the node features are categorical, e.g., in many real-world applications like user profiling and recommender system, feature interactions usually carry important signals for predictive analytics. Ignoring them will result in suboptimal initial node representation and thus weaken the effectiveness of the follow-up graph convolution. In this paper, we propose a new GCN model named CatGCN, which is tailored for graph learning when the node features are categorical. Specifically, we integrate two ways of explicit interaction modeling into the learning of initial node representation, i.e., local interaction modeling on each pair of node features and global interaction modeling on an artificial feature graph. We then refine the enhanced initial node representations with the neighborhood aggregation-based graph convolution. We train CatGCN in an end-to-end fashion and demonstrate it on semi-supervised node classification. Extensive experiments on three tasks of user profiling (the prediction of user age, city, and purchase level) from Tencent and Alibaba datasets validate the effectiveness of CatGCN, especially the positive effect of performing feature interaction modeling before graph convolution.
PolarNet: An Improved Grid Representation for Online LiDAR Point Clouds Semantic Segmentation
Mar 31, 2020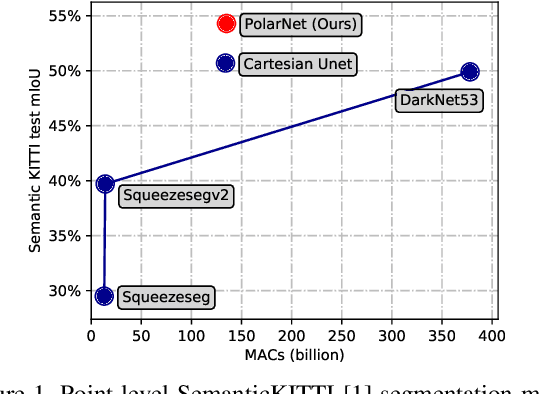

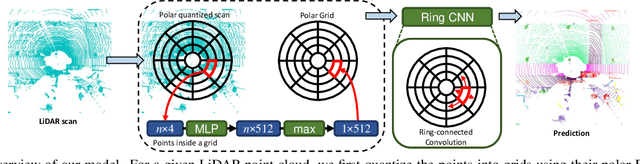
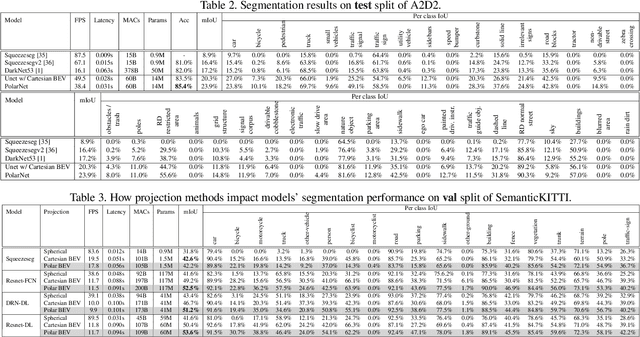
The requirement of fine-grained perception by autonomous driving systems has resulted in recently increased research in the online semantic segmentation of single-scan LiDAR. Emerging datasets and technological advancements have enabled researchers to benchmark this problem and improve the applicable semantic segmentation algorithms. Still, online semantic segmentation of LiDAR scans in autonomous driving applications remains challenging due to three reasons: (1) the need for near-real-time latency with limited hardware, (2) points are distributed unevenly across space, and (3) an increasing number of more fine-grained semantic classes. The combination of the aforementioned challenges motivates us to propose a new LiDAR-specific, KNN-free segmentation algorithm - PolarNet. Instead of using common spherical or bird's-eye-view projection, our polar bird's-eye-view representation balances the points per grid and thus indirectly redistributes the network's attention over the long-tailed points distribution over the radial axis in polar coordination. We find that our encoding scheme greatly increases the mIoU in three drastically different real urban LiDAR single-scan segmentation datasets while retaining ultra low latency and near real-time throughput.
Human and Multi-Agent collaboration in a human-MARL teaming framework
Jun 12, 2020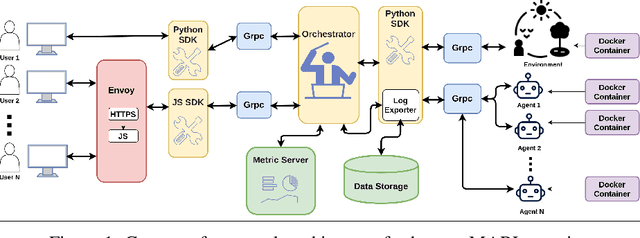
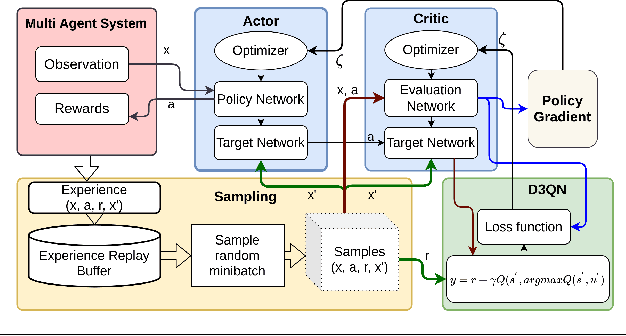
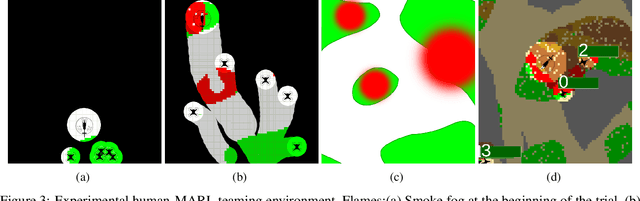
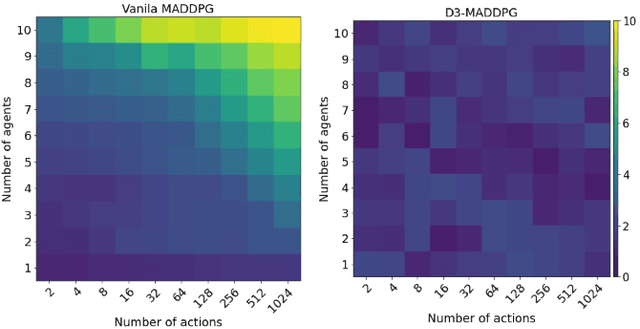
Collaborative multi-agent reinforcement learning (MARL) as a specific category of reinforcement learning provides effective results with agents learning from their observations, received rewards, and internal interactions between agents. However, centralized learning methods with a joint global policy in a highly dynamic environment present unique challenges in dealing with large amounts of information. This study proposes two innovative solutions to address the complexities of a collaboration between a human and multiple reinforcement learning (RL)-based agents (referred to thereafter as Human-MARL teaming) where the goals pursued cannot be achieved by a human alone or agents alone. The first innovation is the introduction of a new open-source MARL framework, called COGMENT, to unite humans and agents in real-time complex dynamic systems and efficiently leverage their interactions as a source of learning. The second innovation is our proposal of a new hybrid MARL method, named Dueling Double Deep Q learning MADDPG (D3-MADDPG) to allow agents to train decentralized policies parallelly in a joint centralized policy. This method can solve the overestimation problem in Q-learning methods of value-based MARL. We demonstrate these innovations by using a designed real-time environment with unmanned aerial vehicles driven by RL agents, collaborating with a human to fight fires. The team of RL agent drones autonomously look for fire seats and the human pilot douses the fires. The results of this study show that the proposed collaborative paradigm and the open-source framework leads to significant reductions in both human effort and exploration costs. Also, the results of the proposed hybrid MARL method shows that it effectively improves the learning process to achieve more reliable Q-values for each action, by decoupling the estimation between state value and advantage value.
End-to-end Learning for OFDM: From Neural Receivers to Pilotless Communication
Sep 11, 2020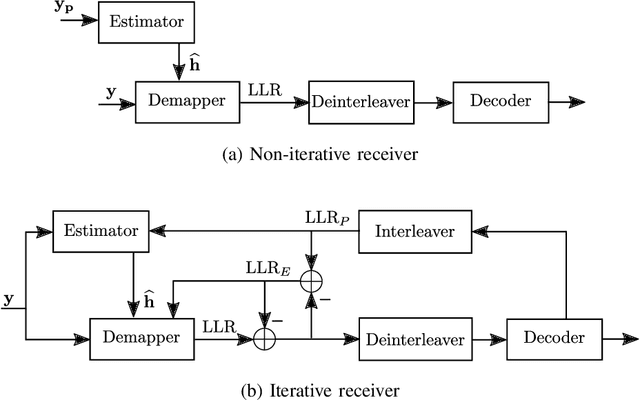
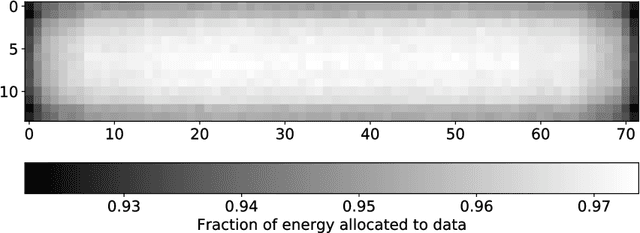
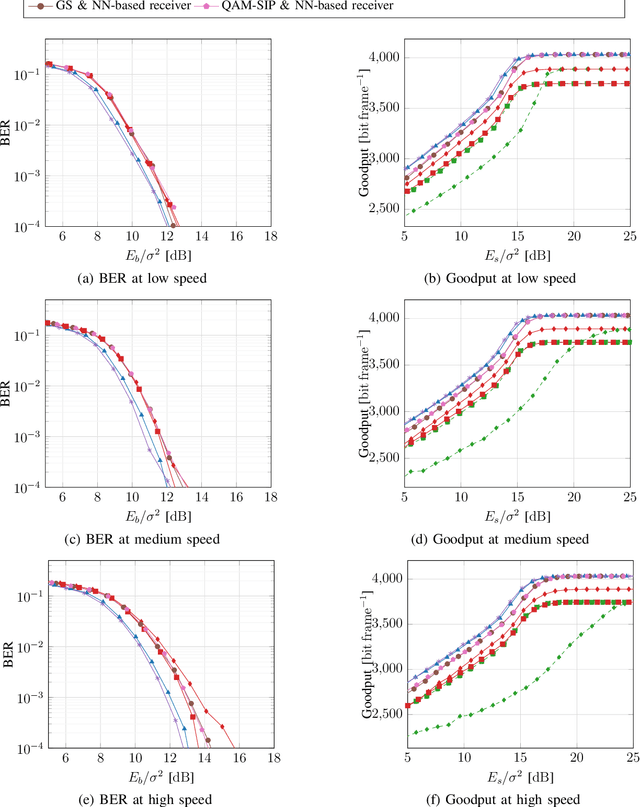
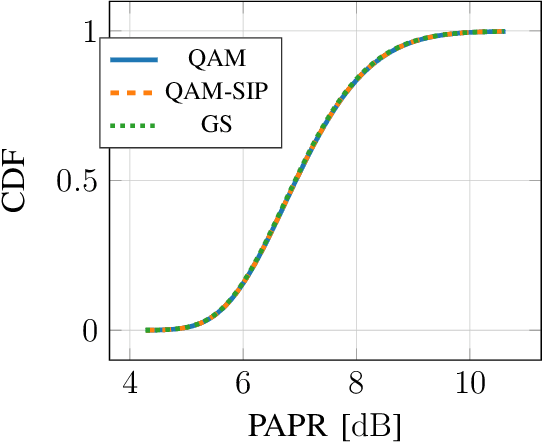
Previous studies have demonstrated that end-to-end learning enables significant shaping gains over additive white Gaussian noise (AWGN) channels. However, its benefits have not yet been quantified over realistic wireless channel models. This work aims to fill this gap by exploring the gains of end-to-end learning over a frequency- and time-selective fading channel using orthogonal frequency division multiplexing (OFDM). With imperfect channel knowledge at the receiver, the shaping gains observed on AWGN channels vanish. Nonetheless, we identify two other sources of performance improvements. The first comes from a neural network (NN)-based receiver operating over a large number of subcarriers and OFDM symbols which allows to significantly reduce the number of orthogonal pilots without loss of bit error rate (BER). The second comes from entirely eliminating orthognal pilots by jointly learning a neural receiver together with either superimposed pilots (SIPs), linearly combined with conventional quadrature amplitude modulation (QAM), or an optimized constellation geometry. The learned geometry works for a wide range of signal-to-noise ratios (SNRs), Doppler and delay spreads, has zero mean and does hence not contain any form of superimposed pilots. Both schemes achieve the same BER as the pilot-based baseline with around 7% higher throughput. Thus, we believe that a jointly learned transmitter and receiver are a very interesting component for beyond-5G communication systems which could remove the need and associated control overhead for demodulation reference signals (DMRSs).
Fusing Concurrent Orthogonal Wide-aperture Sonar Images for Dense Underwater 3D Reconstruction
Jul 20, 2020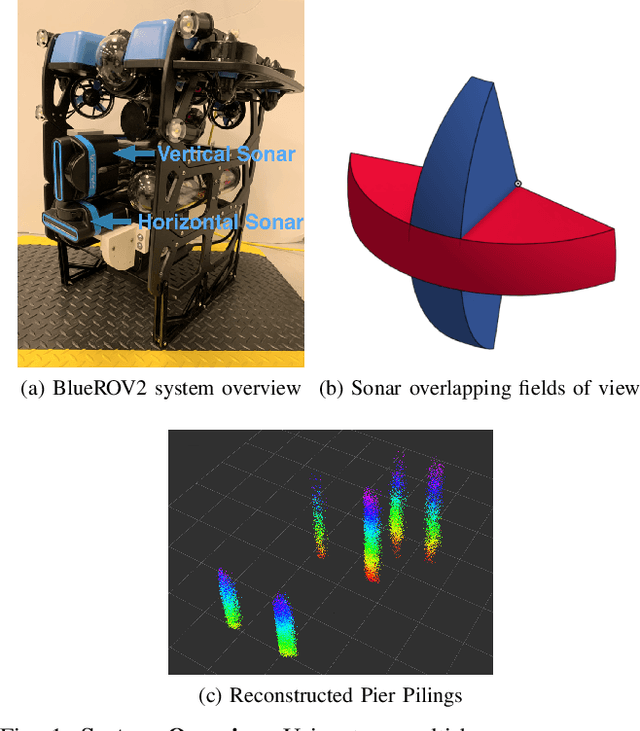
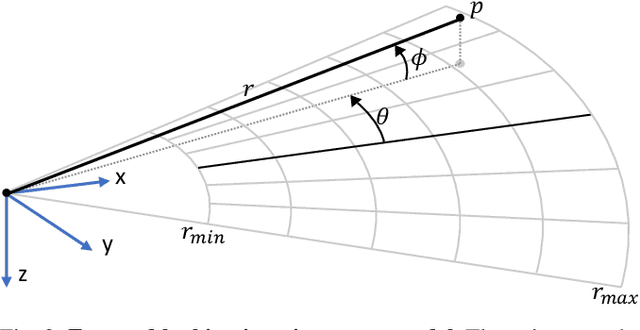
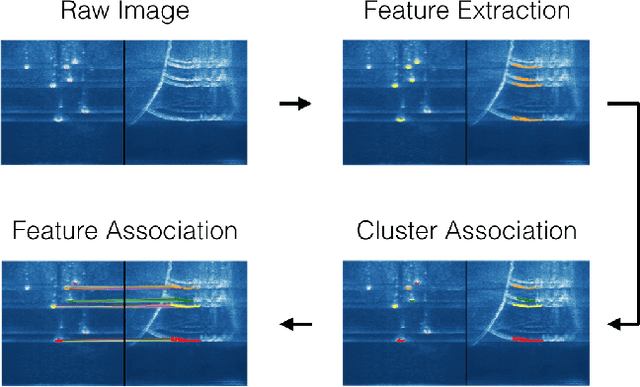
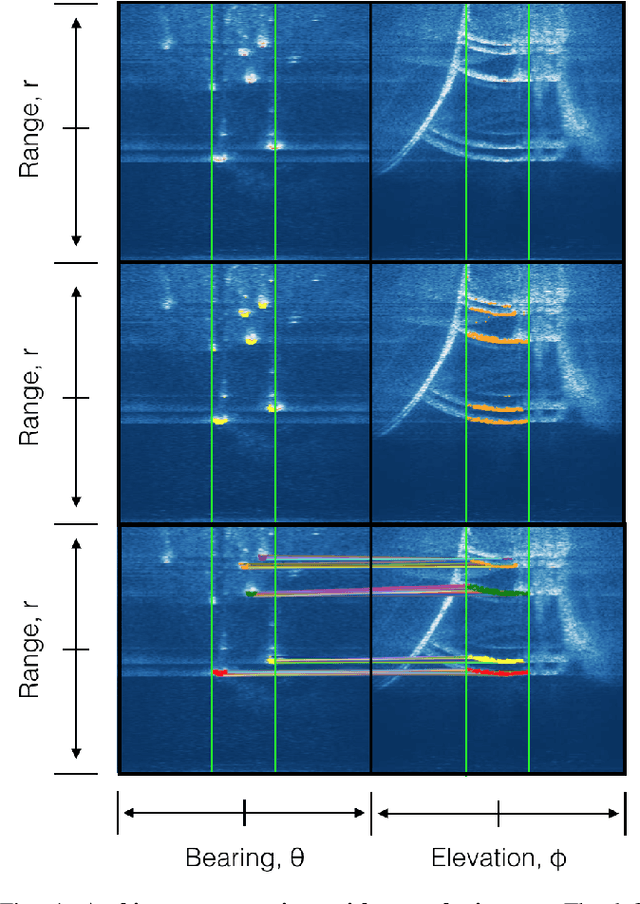
We propose a novel approach to handling the ambiguity in elevation angle associated with the observations of a forward looking multi-beam imaging sonar, and the challenges it poses for performing an accurate 3D reconstruction. We utilize a pair of sonars with orthogonal axes of uncertainty to independently observe the same points in the environment from two different perspectives, and associate these observations. Using these concurrent observations, we can create a dense, fully defined point cloud at every time-step to aid in reconstructing the 3D geometry of underwater scenes. We will evaluate our method in the context of the current state of the art, for which strong assumptions on object geometry limit applicability to generalized 3D scenes. We will discuss results from laboratory tests that quantitatively benchmark our algorithm's reconstruction capabilities, and results from a real-world, tidal river basin which qualitatively demonstrate our ability to reconstruct a cluttered field of underwater objects.
Making Good on LSTMs Unfulfilled Promise
Nov 23, 2019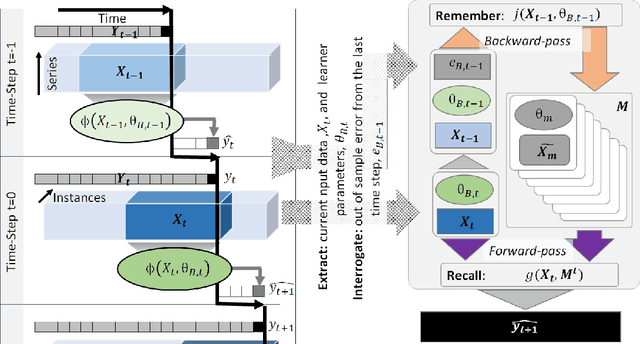
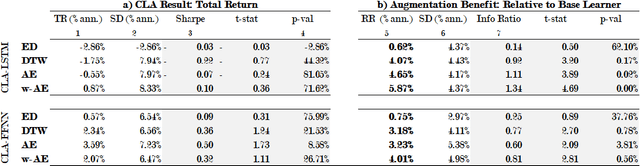
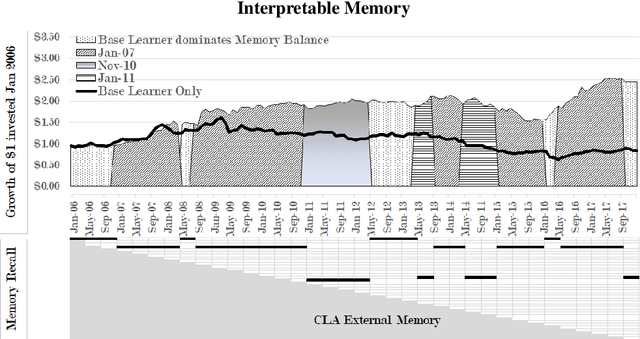
LSTMs promise much to financial time-series analysis, temporal and cross-sectional inference, but we find they do not deliver in a real-world financial management task. We examine an alternative called Continual Learning (CL), a memory-augmented approach, which can provide transparent explanations; which memory did what and when. This work has implications for many financial applications including to credit, time-varying fairness in decision making and more. We make three important new observations. Firstly, as well as being more explainable, time-series CL approaches outperform LSTM and a simple sliding window learner (feed-forward neural net (FFNN)). Secondly, we show that CL based on a sliding window learner (FFNN) is more effective than CL based on a sequential learner (LSTM). Thirdly, we examine how real-world, time-series noise impacts several similarity approaches used in CL memory addressing. We provide these insights using an approach called Continual Learning Augmentation (CLA) tested on a complex real world problem; emerging market equities investment decision making. CLA provides a test-bed as it can be based on different types of time-series learner, allowing testing of LSTM and sliding window (FFNN) learners side by side. CLA is also used to test several distance approaches used in a memory recall-gate: euclidean distance (ED), dynamic time warping (DTW), auto-encoder (AE) and a novel hybrid approach, warp-AE. We find CLA out-performs simple LSTM and FFNN learners and CLA based on a sliding window (CLA-FFNN) out-performs a LSTM (CLA-LSTM) implementation. While for memory-addressing, ED under-performs DTW and AE but warp-AE shows the best overall performance in a real-world financial task.
Localizing the Common Action Among a Few Videos
Aug 13, 2020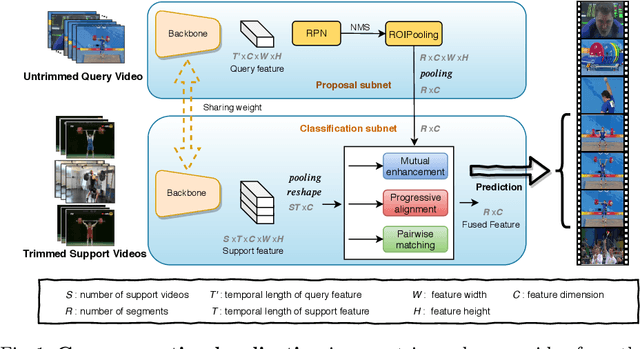
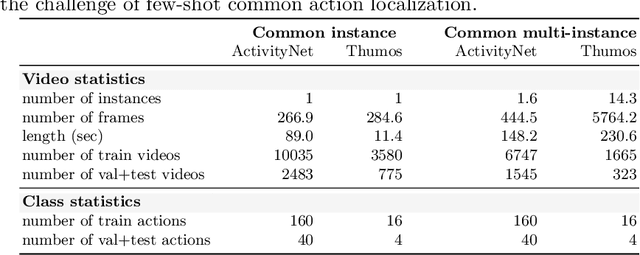
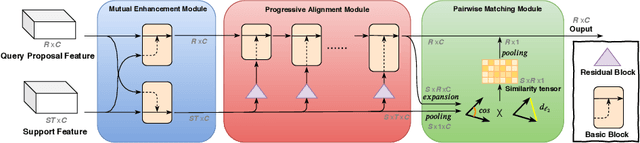
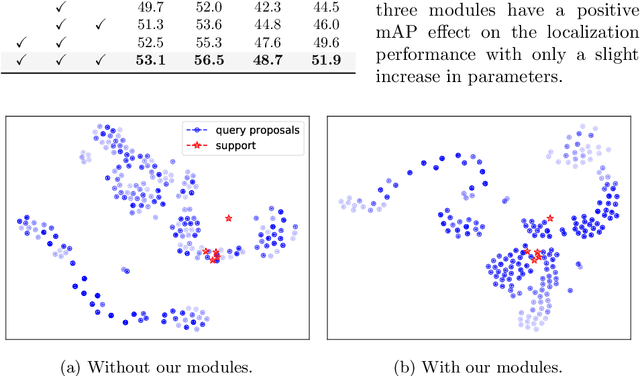
This paper strives to localize the temporal extent of an action in a long untrimmed video. Where existing work leverages many examples with their start, their ending, and/or the class of the action during training time, we propose few-shot common action localization. The start and end of an action in a long untrimmed video is determined based on just a hand-full of trimmed video examples containing the same action, without knowing their common class label. To address this task, we introduce a new 3D convolutional network architecture able to align representations from the support videos with the relevant query video segments. The network contains: (\textit{i}) a mutual enhancement module to simultaneously complement the representation of the few trimmed support videos and the untrimmed query video; (\textit{ii}) a progressive alignment module that iteratively fuses the support videos into the query branch; and (\textit{iii}) a pairwise matching module to weigh the importance of different support videos. Evaluation of few-shot common action localization in untrimmed videos containing a single or multiple action instances demonstrates the effectiveness and general applicability of our proposal.