 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Automatic Classification of Irregularly Sampled Time Series with Unequal Lengths: A Case Study on Estimated Glomerular Filtration Rate
May 17, 2016
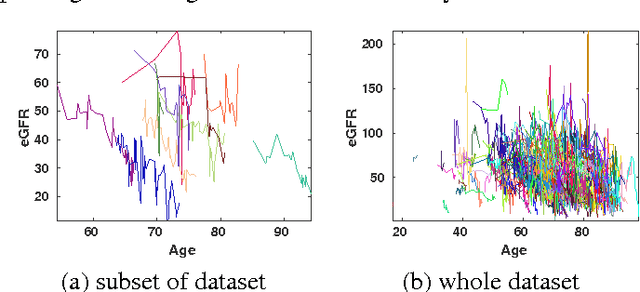

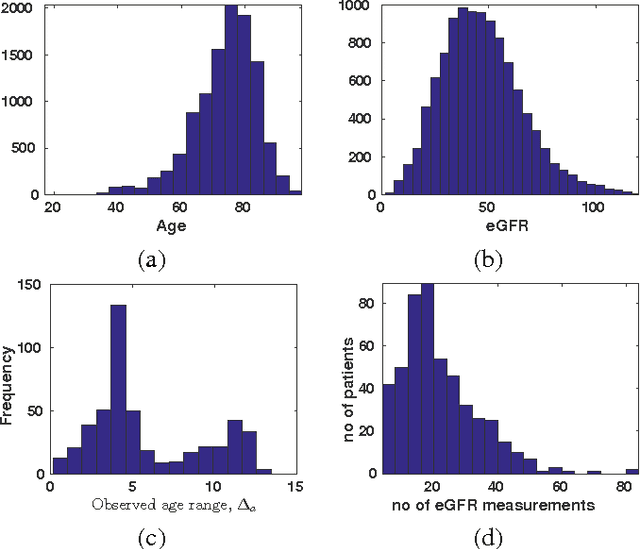
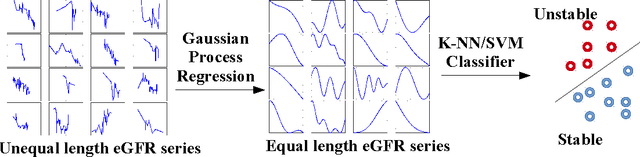
A patient's estimated glomerular filtration rate (eGFR) can provide important information about disease progression and kidney function. Traditionally, an eGFR time series is interpreted by a human expert labelling it as stable or unstable. While this approach works for individual patients, the time consuming nature of it precludes the quick evaluation of risk in large numbers of patients. However, automating this process poses significant challenges as eGFR measurements are usually recorded at irregular intervals and the series of measurements differs in length between patients. Here we present a two-tier system to automatically classify an eGFR trend. First, we model the time series using Gaussian process regression (GPR) to fill in `gaps' by resampling a fixed size vector of fifty time-dependent observations. Second, we classify the resampled eGFR time series using a K-NN/SVM classifier, and evaluate its performance via 5-fold cross validation. Using this approach we achieved an F-score of 0.90, compared to 0.96 for 5 human experts when scored amongst themselves.
Towards an Understanding of Residual Networks Using Neural Tangent Hierarchy (NTH)
Jul 07, 2020
Gradient descent yields zero training loss in polynomial time for deep neural networks despite non-convex nature of the objective function. The behavior of network in the infinite width limit trained by gradient descent can be described by the Neural Tangent Kernel (NTK) introduced in \cite{Jacot2018Neural}. In this paper, we study dynamics of the NTK for finite width Deep Residual Network (ResNet) using the neural tangent hierarchy (NTH) proposed in \cite{Huang2019Dynamics}. For a ResNet with smooth and Lipschitz activation function, we reduce the requirement on the layer width $m$ with respect to the number of training samples $n$ from quartic to cubic. Our analysis suggests strongly that the particular skip-connection structure of ResNet is the main reason for its triumph over fully-connected network.
Search-Space Characterization for Real-time Heuristic Search
Aug 15, 2013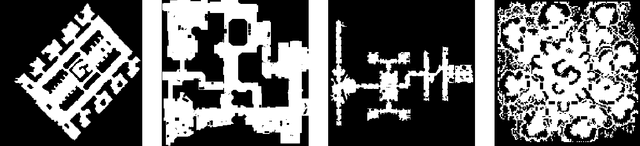
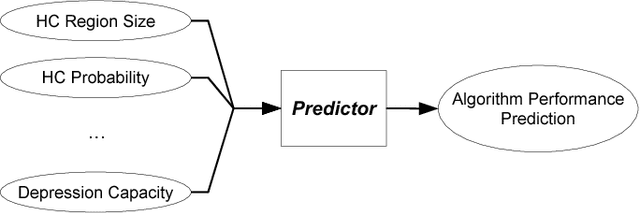
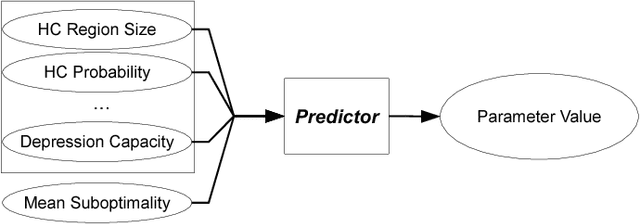
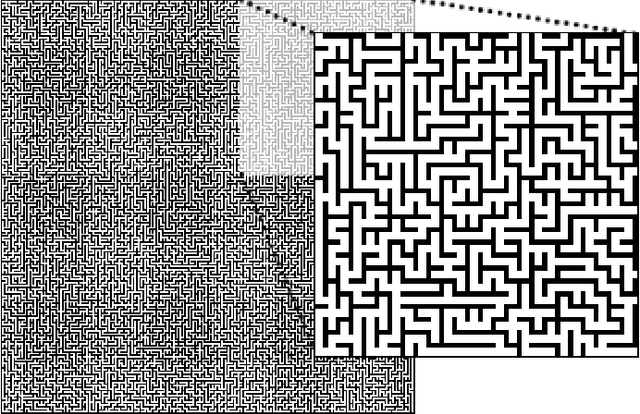
Recent real-time heuristic search algorithms have demonstrated outstanding performance in video-game pathfinding. However, their applications have been thus far limited to that domain. We proceed with the aim of facilitating wider applications of real-time search by fostering a greater understanding of the performance of recent algorithms. We first introduce eight algorithm-independent complexity measures for search spaces and correlate their values with algorithm performance. The complexity measures are statistically shown to be significant predictors of algorithm performance across a set of commercial video-game maps. We then extend this analysis to a wider variety of search spaces in the first application of database-driven real-time search to domains outside of video-game pathfinding. In doing so, we gain insight into algorithm performance and possible enhancement as well as into search space complexity.
Reinforcement Learning approach for Real Time Strategy Games Battle city and S3
Feb 16, 2016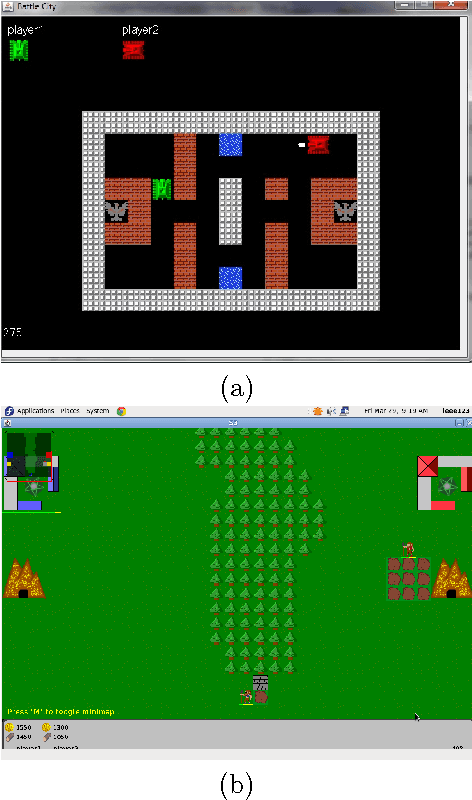
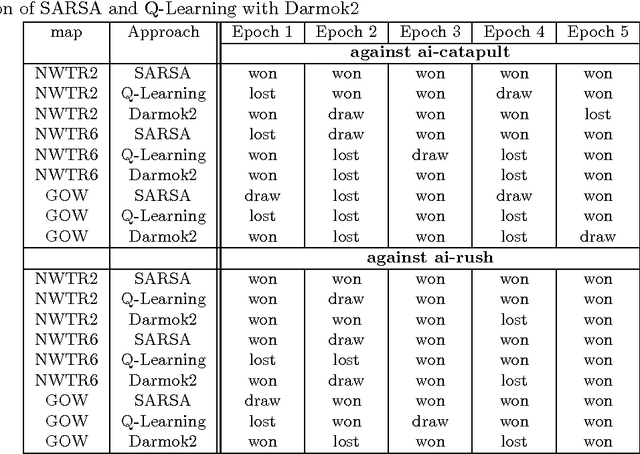
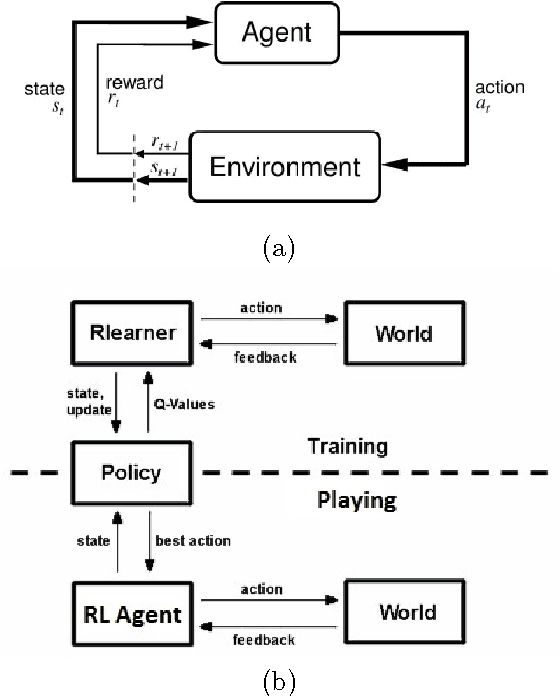
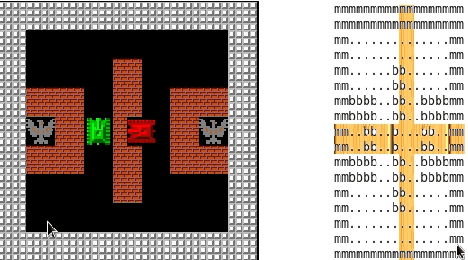
In this paper we proposed reinforcement learning algorithms with the generalized reward function. In our proposed method we use Q-learning and SARSA algorithms with generalised reward function to train the reinforcement learning agent. We evaluated the performance of our proposed algorithms on two real-time strategy games called BattleCity and S3. There are two main advantages of having such an approach as compared to other works in RTS. (1) We can ignore the concept of a simulator which is often game specific and is usually hard coded in any type of RTS games (2) our system can learn from interaction with any opponents and quickly change the strategy according to the opponents and do not need any human traces as used in previous works. Keywords : Reinforcement learning, Machine learning, Real time strategy, Artificial intelligence.
Mining and modeling complex leadership-followership dynamics of movement data
Oct 04, 2020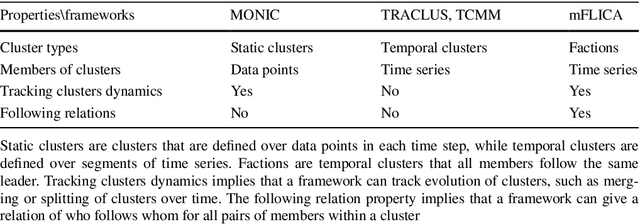
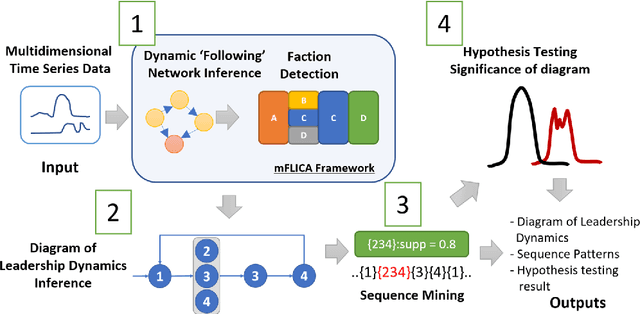
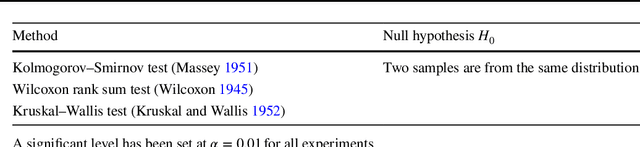
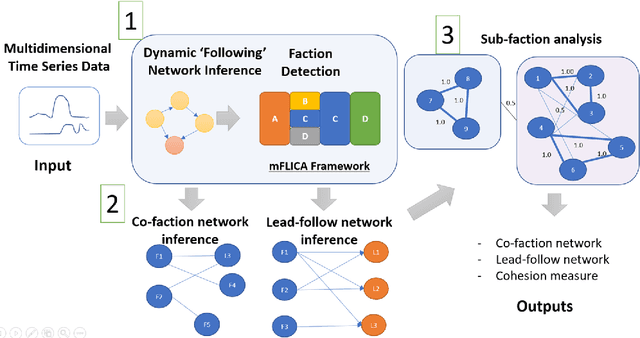
Leadership and followership are essential parts of collective decision and organization in social animals, including humans. In nature, relationships of leaders and followers are dynamic and vary with context or temporal factors. Understanding dynamics of leadership and followership, such as how leaders and followers change, emerge, or converge, allows scientists to gain more insight into group decision-making and collective behavior in general. However, given only data of individual activities, it is challenging to infer the dynamics of leaders and followers. In this paper, we focus on mining and modeling frequent patterns of leading and following. We formalize new computational problems and propose a framework that can be used to address several questions regarding group movement. We use the leadership inference framework, mFLICA, to infer the time series of leaders and their factions from movement datasets and then propose an approach to mine and model frequent patterns of both leadership and followership dynamics. We evaluate our framework performance by using several simulated datasets, as well as the real-world dataset of baboon movement to demonstrate the applications of our framework. These are novel computational problems and, to the best of our knowledge, there are no existing comparable methods to address them. Thus, we modify and extend an existing leadership inference framework to provide a non-trivial baseline for comparison. Our framework performs better than this baseline in all datasets. Our framework opens the opportunities for scientists to generate testable scientific hypotheses about the dynamics of leadership in movement data.
* This accepted manuscript is made publicly available 12 months after official publication, which is complied with the publisher policy. The final publication is available at link.springer.com
Multi-Agent Deep Reinforcement Learning enabled Computation Resource Allocation in a Vehicular Cloud Network
Aug 17, 2020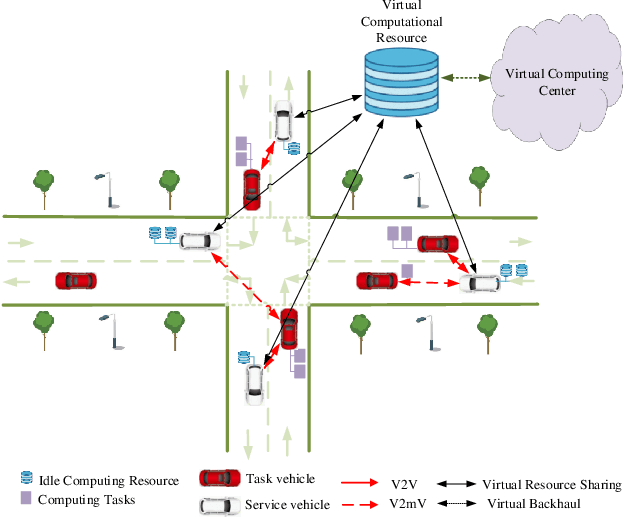
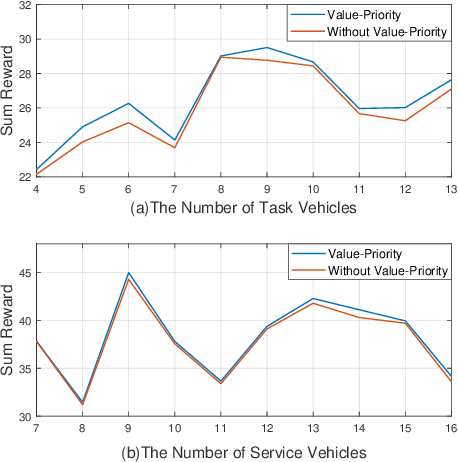
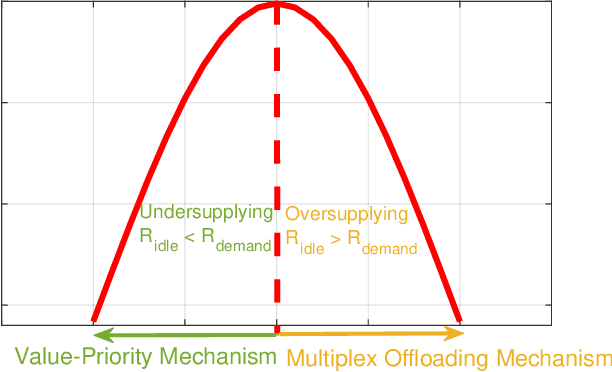
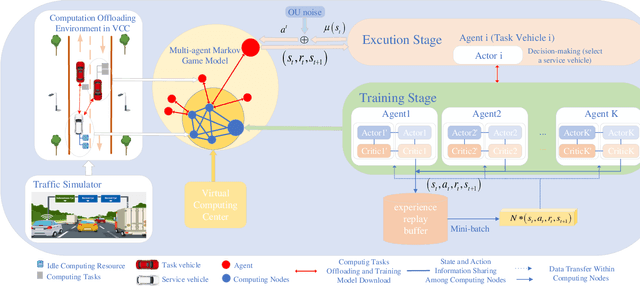
In this paper, we investigate the computational resource allocation problem in a distributed Ad-Hoc vehicular network with no centralized infrastructure support. To support the ever increasing computational needs in such a vehicular network, the distributed virtual cloud network (VCN) is formed, based on which a computational resource sharing scheme through offloading among nearby vehicles is proposed. In view of the time-varying computational resource in VCN, the statistical distribution characteristics for computational resource are analyzed in detail. Thereby, a resource-aware combinatorial optimization objective mechanism is proposed. To alleviate the non-stationary environment caused by the typically multi-agent environment in VCN, we adopt a centralized training and decentralized execution framework. In addition, for the objective optimization problem, we model it as a Markov game and propose a DRL based multi-agent deep deterministic reinforcement learning (MADDPG) algorithm to solve it. Interestingly, to overcome the dilemma of lacking a real central control unit in VCN, the allocation is actually completed on the vehicles in a distributed manner. The simulation results are presented to demonstrate our scheme's effectiveness.
Local-Global Video-Text Interactions for Temporal Grounding
Apr 16, 2020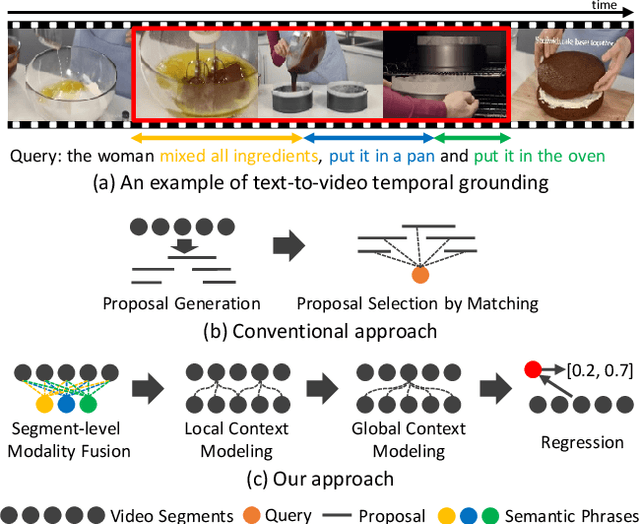
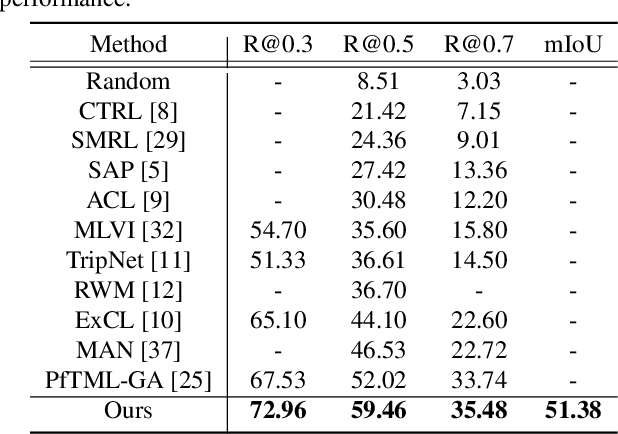
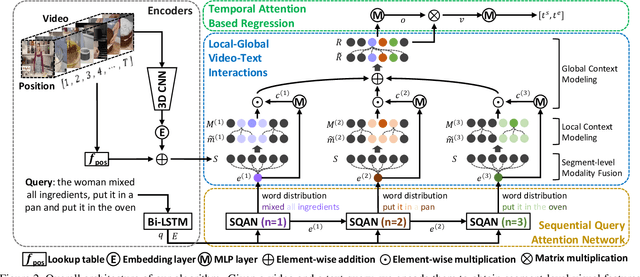
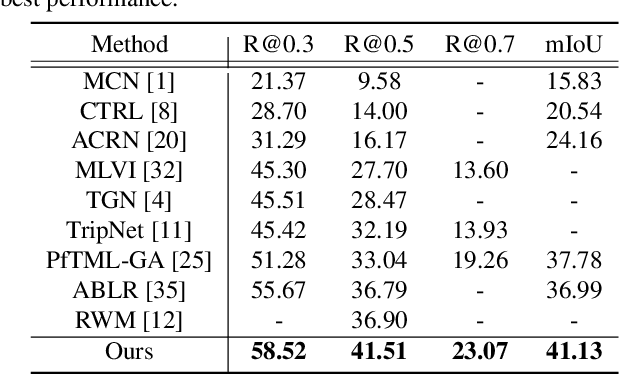
This paper addresses the problem of text-to-video temporal grounding, which aims to identify the time interval in a video semantically relevant to a text query. We tackle this problem using a novel regression-based model that learns to extract a collection of mid-level features for semantic phrases in a text query, which corresponds to important semantic entities described in the query (e.g., actors, objects, and actions), and reflect bi-modal interactions between the linguistic features of the query and the visual features of the video in multiple levels. The proposed method effectively predicts the target time interval by exploiting contextual information from local to global during bi-modal interactions. Through in-depth ablation studies, we find out that incorporating both local and global context in video and text interactions is crucial to the accurate grounding. Our experiment shows that the proposed method outperforms the state of the arts on Charades-STA and ActivityNet Captions datasets by large margins, 7.44\% and 4.61\% points at Recall@tIoU=0.5 metric, respectively. Code is available in https://github.com/JonghwanMun/LGI4temporalgrounding.
Tell me what this is: Few-Shot Incremental Object Learning by a Robot
Jul 15, 2020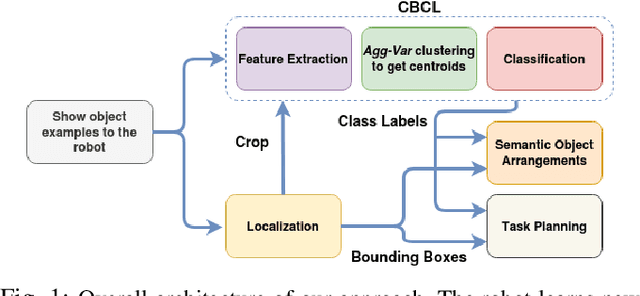
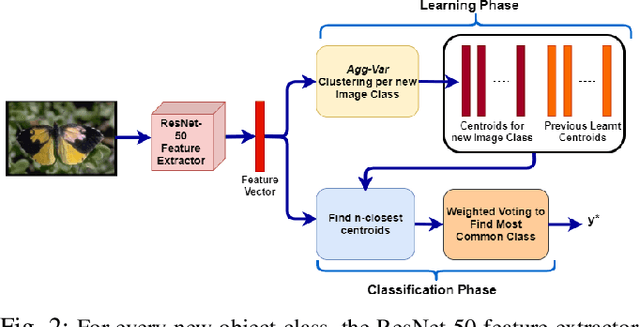
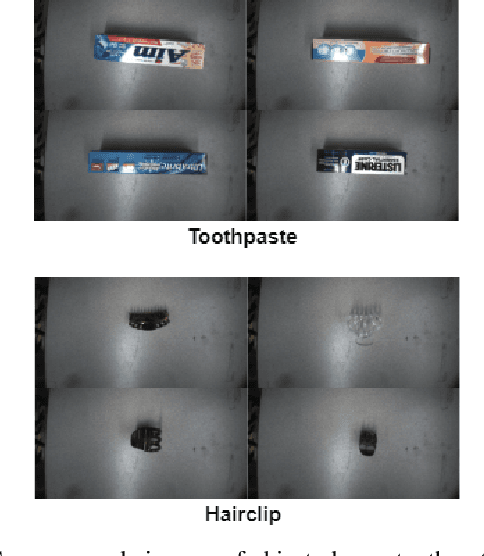
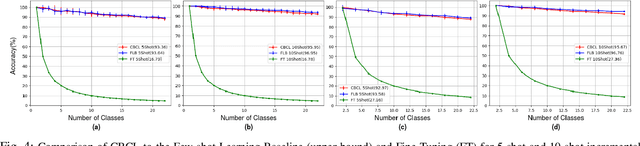
For many applications, robots will need to be incrementally trained to recognize the specific objects needed for an application. This paper presents a practical system for incrementally training a robot to recognize different object categories using only a small set of visual examples provided by a human. The paper uses a recently developed state-of-the-art method for few-shot incremental learning of objects. After learning the object classes incrementally, the robot performs a table cleaning task organizing objects into categories specified by the human. We also demonstrate the system's ability to learn arrangements of objects and predict missing or incorrectly placed objects. Experimental evaluations demonstrate that our approach achieves nearly the same performance as a system trained with all examples at one time (batch training), which constitutes a theoretical upper bound.
A Fourier State Space Model for Bayesian ODE Filters
Jul 22, 2020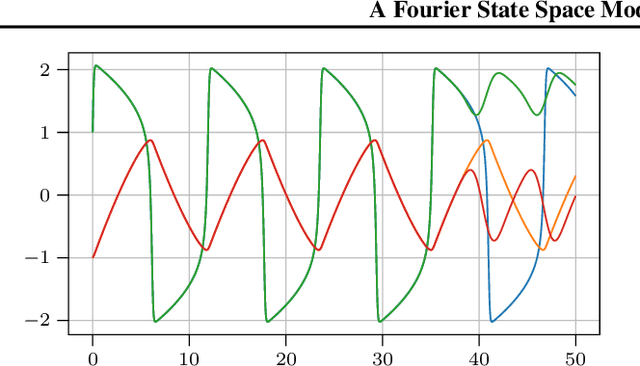
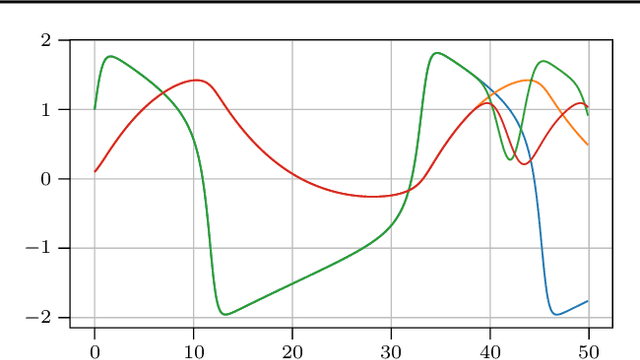
Gaussian ODE filtering is a probabilistic numerical method to solve ordinary differential equations (ODEs). It computes a Bayesian posterior over the solution from evaluations of the vector field defining the ODE. Its most popular version, which employs an integrated Brownian motion prior, uses Taylor expansions of the mean to extrapolate forward and has the same convergence rates as classical numerical methods. As the solution of many important ODEs are periodic functions (oscillators), we raise the question whether Fourier expansions can also be brought to bear within the framework of Gaussian ODE filtering. To this end, we construct a Fourier state space model for ODEs and a `hybrid' model that combines a Taylor (Brownian motion) and Fourier state space model. We show by experiments how the hybrid model might become useful in cheaply predicting until the end of the time domain.
Dynamic Graph Neural Network for Traffic Forecasting in Wide Area Networks
Aug 28, 2020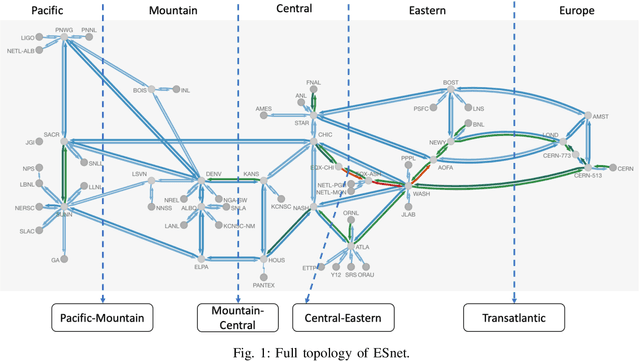
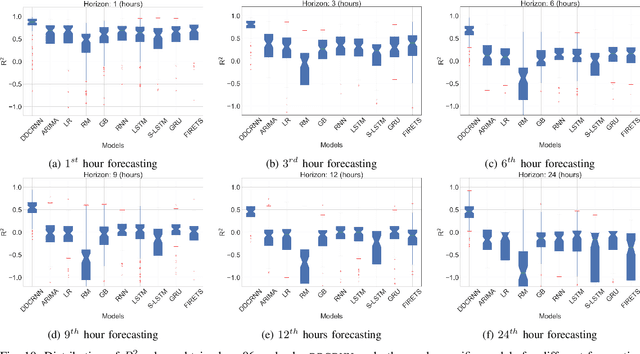
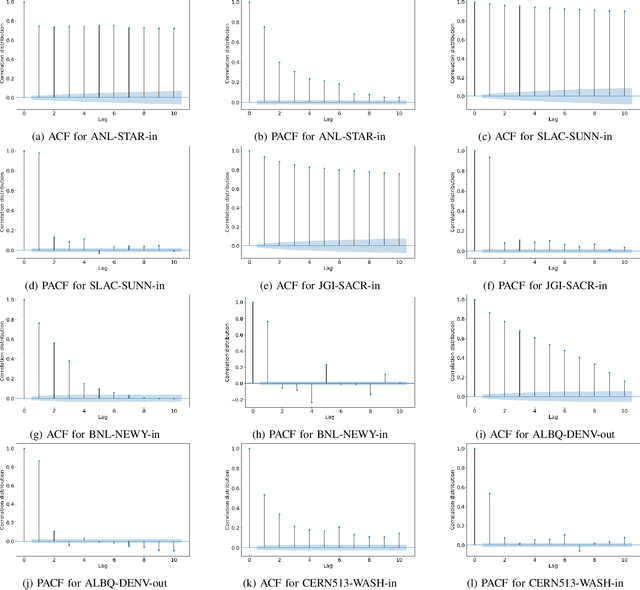
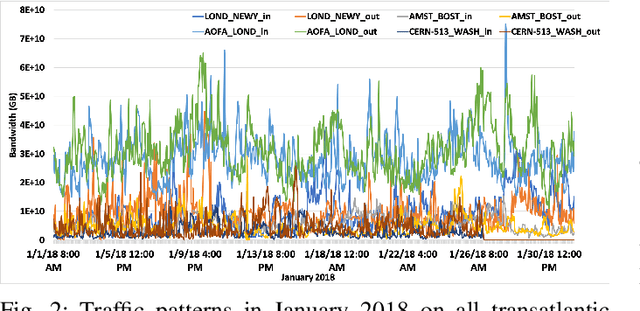
Wide area networking infrastructures (WANs), particularly science and research WANs, are the backbone for moving large volumes of scientific data between experimental facilities and data centers. With demands growing at exponential rates, these networks are struggling to cope with large data volumes, real-time responses, and overall network performance. Network operators are increasingly looking for innovative ways to manage the limited underlying network resources. Forecasting network traffic is a critical capability for proactive resource management, congestion mitigation, and dedicated transfer provisioning. To this end, we propose a nonautoregressive graph-based neural network for multistep network traffic forecasting. Specifically, we develop a dynamic variant of diffusion convolutional recurrent neural networks to forecast traffic in research WANs. We evaluate the efficacy of our approach on real traffic from ESnet, the U.S. Department of Energy's dedicated science network. Our results show that compared to classical forecasting methods, our approach explicitly learns the dynamic nature of spatiotemporal traffic patterns, showing significant improvements in forecasting accuracy. Our technique can surpass existing statistical and deep learning approaches by achieving approximately 20% mean absolute percentage error for multiple hours of forecasts despite dynamic network traffic settings.