 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Conley's fundamental theorem for a class of hybrid systems
May 07, 2020
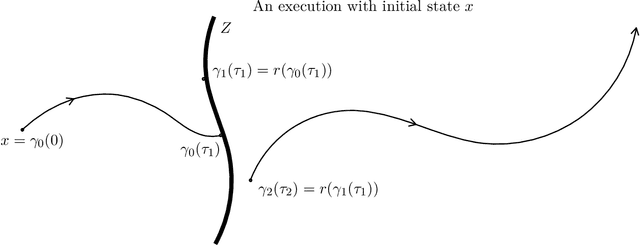
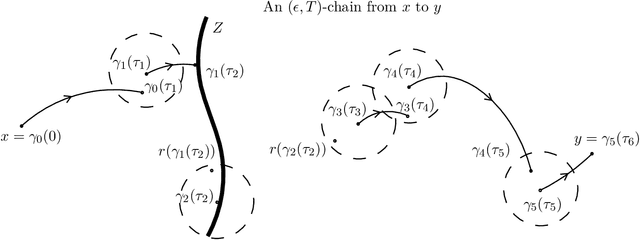
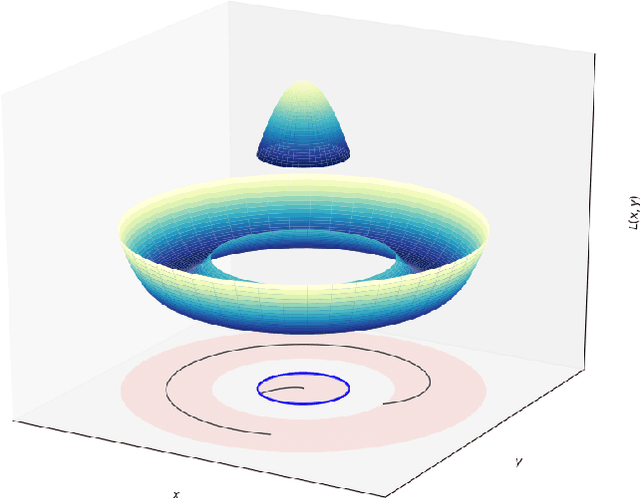
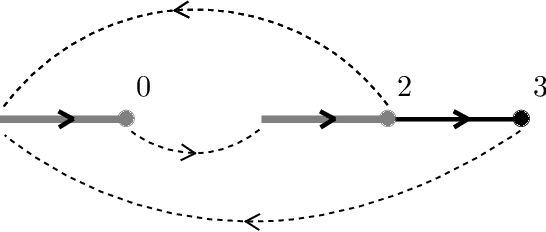
We establish versions of Conley's (i) fundamental theorem and (ii) decomposition theorem for a broad class of hybrid dynamical systems. The hybrid version of (i) asserts that a globally-defined "hybrid complete Lyapunov function" exists for every hybrid system in this class. Motivated by mechanics and control settings where physical or engineered events cause abrupt changes in a system's governing dynamics, our results apply to a large class of Lagrangian hybrid systems (with impacts) studied extensively in the robotics literature. Viewed formally, these results generalize those of Conley and Franks for continuous-time and discrete-time dynamical systems, respectively, on metric spaces. However, we furnish specific examples illustrating how our statement of sufficient conditions represents merely an early step in the longer project of establishing what formal assumptions can and cannot endow hybrid systems models with the topologically well characterized partitions of limit behavior that make Conley's theory so valuable in those classical settings.
BP-DIP: A Backprojection based Deep Image Prior
Mar 11, 2020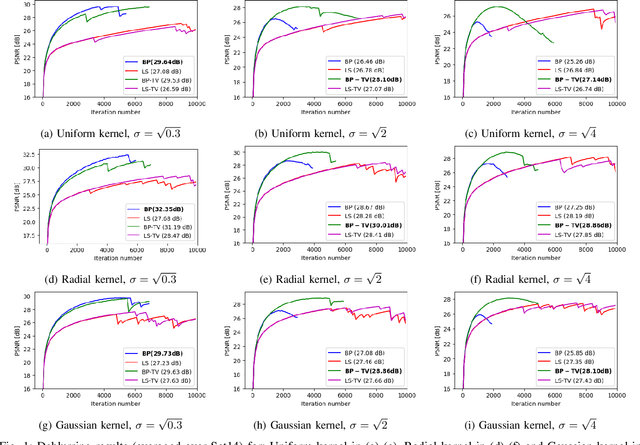

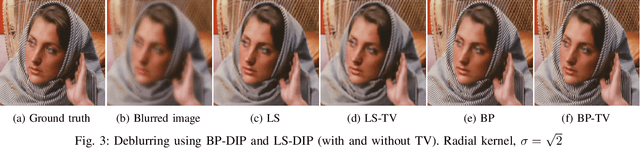
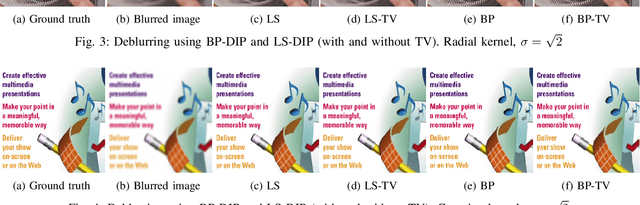
Deep neural networks are a very powerful tool for many computer vision tasks, including image restoration, exhibiting state-of-the-art results. However, the performance of deep learning methods tends to drop once the observation model used in training mismatches the one in test time. In addition, most deep learning methods require vast amounts of training data, which are not accessible in many applications. To mitigate these disadvantages, we propose to combine two image restoration approaches: (i) Deep Image Prior (DIP), which trains a convolutional neural network (CNN) from scratch in test time using the given degraded image. It does not require any training data and builds on the implicit prior imposed by the CNN architecture; and (ii) a backprojection (BP) fidelity term, which is an alternative to the standard least squares loss that is usually used in previous DIP works. We demonstrate the performance of the proposed method, termed BP-DIP, on the deblurring task and show its advantages over the plain DIP, with both higher PSNR values and better inference run-time.
Dynamic Simulation-Guided Design of Tumbling Magnetic Microrobots
Oct 05, 2020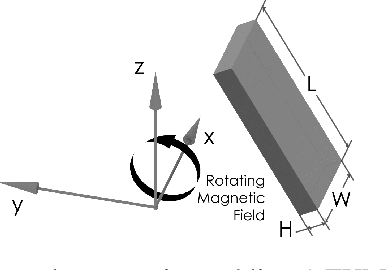
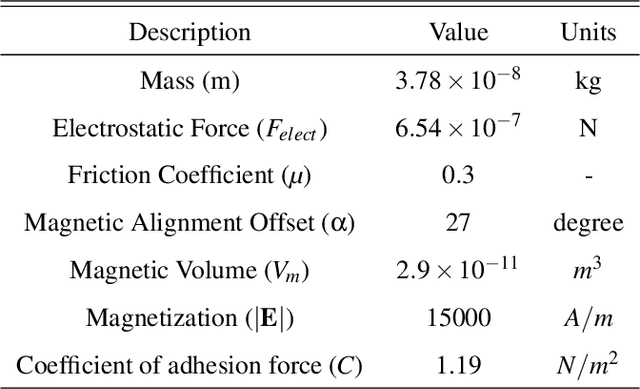
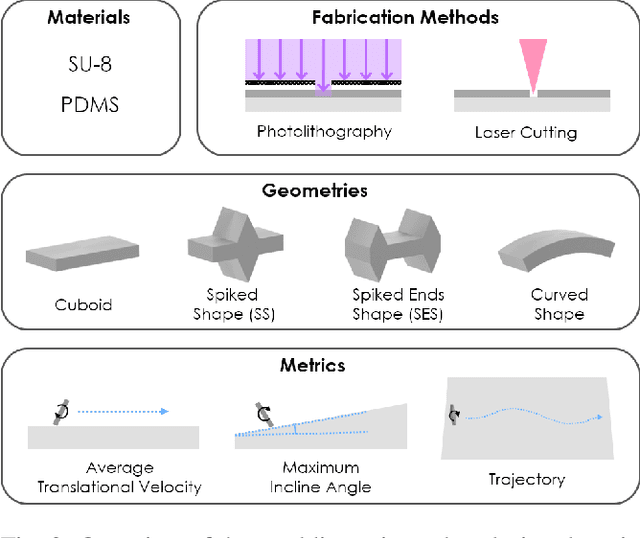
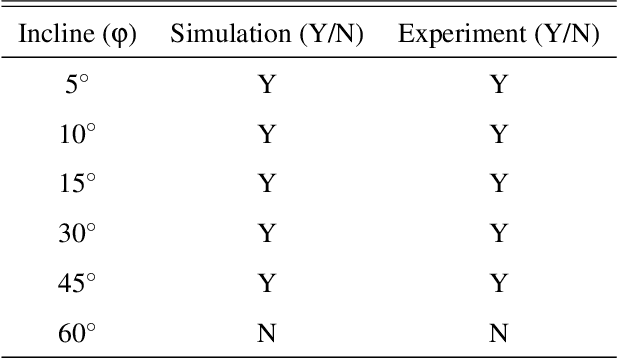
Design of robots at the small scale is a trial-and-error based process, which is costly and time-consuming. There are few dynamic simulation tools available to accurately predict the motion or performance of untethered microrobots as they move over a substrate. At smaller length scales, the influence of adhesion and friction, which scales with surface area, becomes more pronounced. Thus, rigid body dynamic simulators, which implicitly assume that contact between two bodies can be modeled as point contact are not suitable. In this paper, we present techniques for simulating the motion of microrobots where there can be intermittent and non-point contact between the robot and the substrate. We use these techniques to study the motion of tumbling microrobots of different shapes and select shapes that are optimal for improving locomotion performance. Simulation results are verified using experimental data on linear velocity, maximum climbable incline angle, and microrobot trajectory. Microrobots with improved geometry were fabricated, but limitations in the fabrication process resulted in unexpected manufacturing errors and material/size scale adjustments. The developed simulation model is able to incorporate these limitations and emulate their effect on the microrobot's motion, reproducing the experimental behavior of the tumbling microrobots, further showcasing the effectiveness of having such a dynamic model.
Understanding and Detecting Convergence for Stochastic Gradient Descent with Momentum
Aug 27, 2020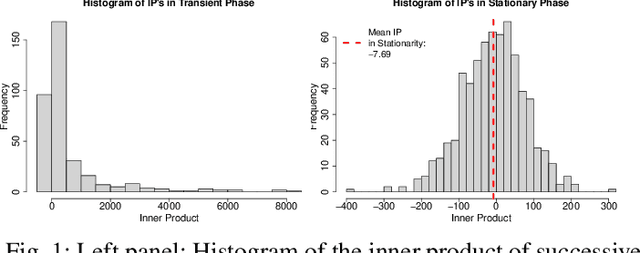
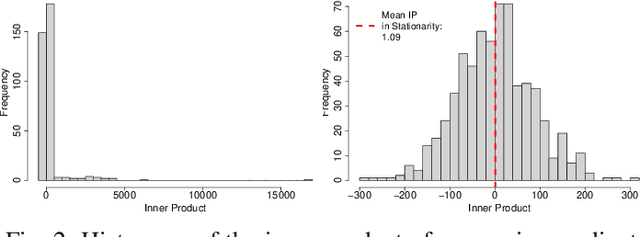
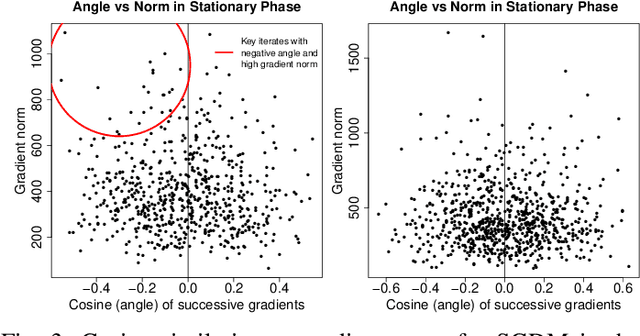
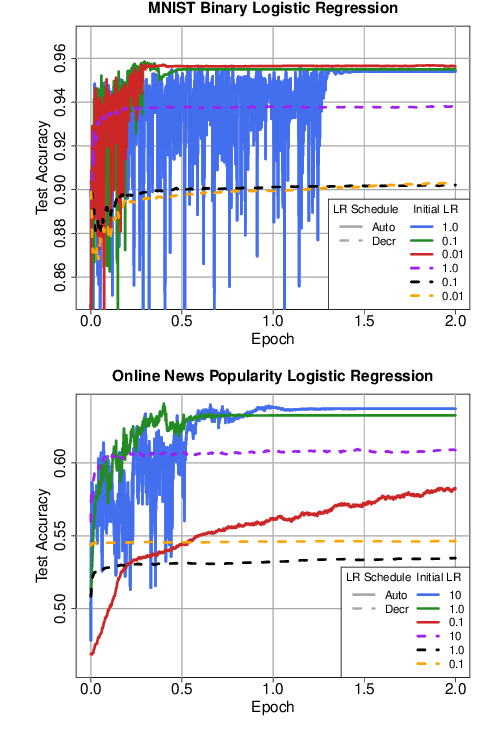
Convergence detection of iterative stochastic optimization methods is of great practical interest. This paper considers stochastic gradient descent (SGD) with a constant learning rate and momentum. We show that there exists a transient phase in which iterates move towards a region of interest, and a stationary phase in which iterates remain bounded in that region around a minimum point. We construct a statistical diagnostic test for convergence to the stationary phase using the inner product between successive gradients and demonstrate that the proposed diagnostic works well. We theoretically and empirically characterize how momentum can affect the test statistic of the diagnostic, and how the test statistic captures a relatively sparse signal within the gradients in convergence. Finally, we demonstrate an application to automatically tune the learning rate by reducing it each time stationarity is detected, and show the procedure is robust to mis-specified initial rates.
Map-Enhanced Ego-Lane Detection in the Missing Feature Scenarios
Apr 02, 2020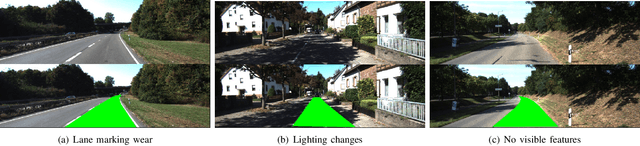
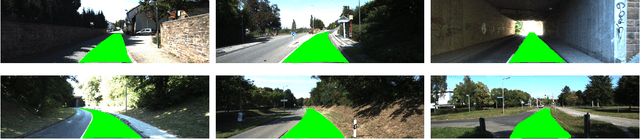
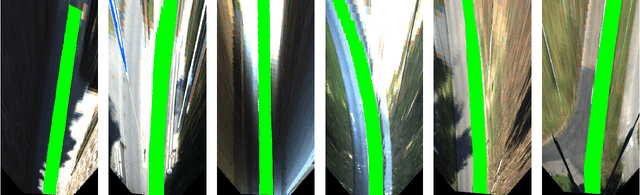
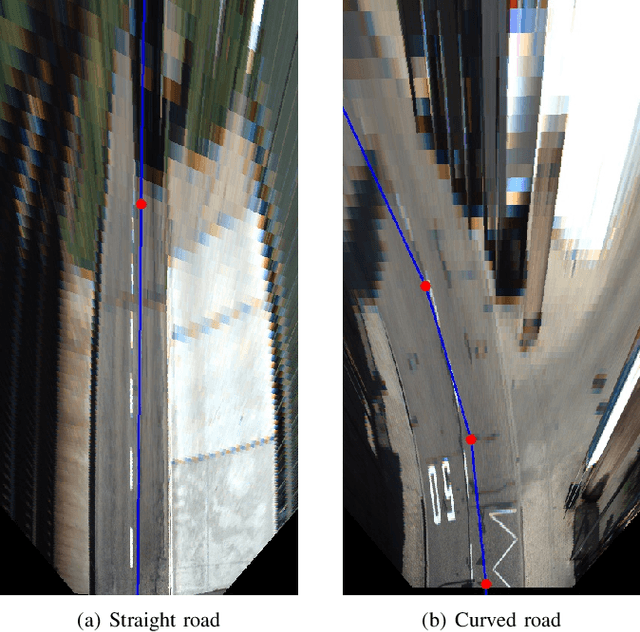
As one of the most important tasks in autonomous driving systems, ego-lane detection has been extensively studied and has achieved impressive results in many scenarios. However, ego-lane detection in the missing feature scenarios is still an unsolved problem. To address this problem, previous methods have been devoted to proposing more complicated feature extraction algorithms, but they are very time-consuming and cannot deal with extreme scenarios. Different from others, this paper exploits prior knowledge contained in digital maps, which has a strong capability to enhance the performance of detection algorithms. Specifically, we employ the road shape extracted from OpenStreetMap as lane model, which is highly consistent with the real lane shape and irrelevant to lane features. In this way, only a few lane features are needed to eliminate the position error between the road shape and the real lane, and a search-based optimization algorithm is proposed. Experiments show that the proposed method can be applied to various scenarios and can run in real-time at a frequency of 20 Hz. At the same time, we evaluated the proposed method on the public KITTI Lane dataset where it achieves state-of-the-art performance. Moreover, our code will be open source after publication.
Real-Time User-Guided Image Colorization with Learned Deep Priors
May 08, 2017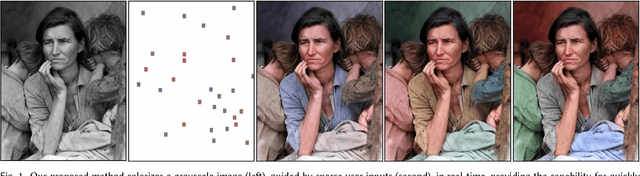
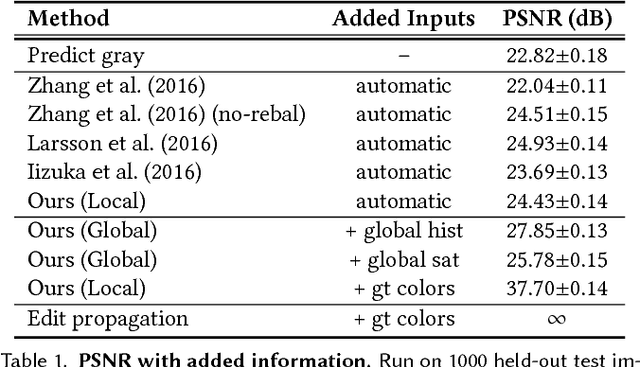
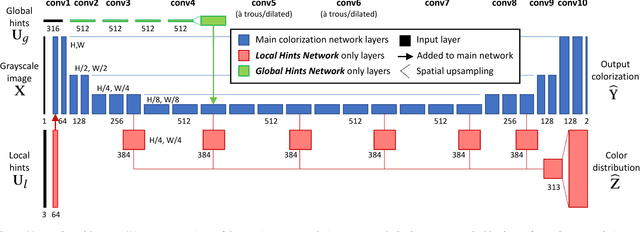
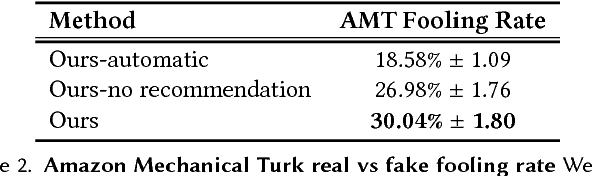
We propose a deep learning approach for user-guided image colorization. The system directly maps a grayscale image, along with sparse, local user "hints" to an output colorization with a Convolutional Neural Network (CNN). Rather than using hand-defined rules, the network propagates user edits by fusing low-level cues along with high-level semantic information, learned from large-scale data. We train on a million images, with simulated user inputs. To guide the user towards efficient input selection, the system recommends likely colors based on the input image and current user inputs. The colorization is performed in a single feed-forward pass, enabling real-time use. Even with randomly simulated user inputs, we show that the proposed system helps novice users quickly create realistic colorizations, and offers large improvements in colorization quality with just a minute of use. In addition, we demonstrate that the framework can incorporate other user "hints" to the desired colorization, showing an application to color histogram transfer. Our code and models are available at https://richzhang.github.io/ideepcolor.
Deep Learning based Covert Attack Identification for Industrial Control Systems
Sep 25, 2020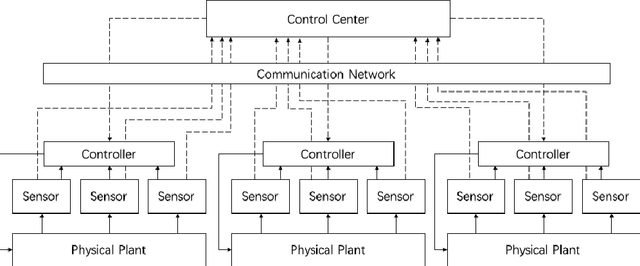
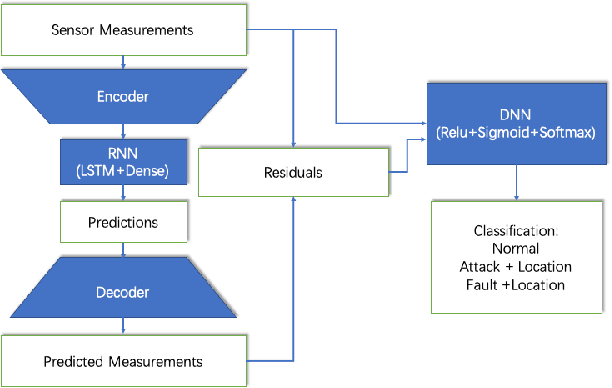
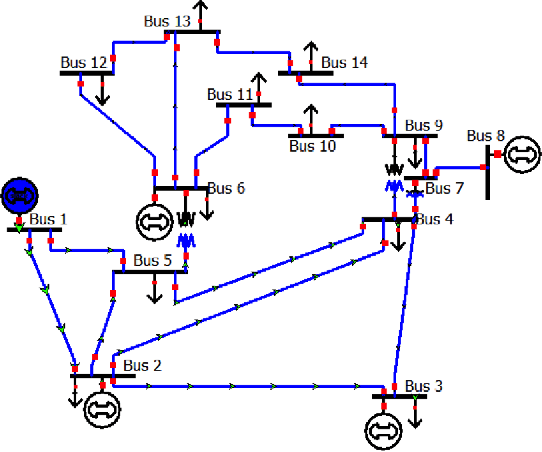
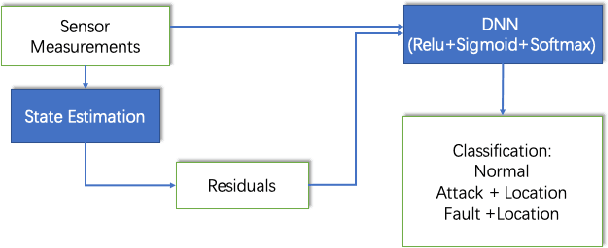
Cybersecurity of Industrial Control Systems (ICS) is drawing significant concerns as data communication increasingly leverages wireless networks. A lot of data-driven methods were developed for detecting cyberattacks, but few are focused on distinguishing them from equipment faults. In this paper, we develop a data-driven framework that can be used to detect, diagnose, and localize a type of cyberattack called covert attacks on smart grids. The framework has a hybrid design that combines an autoencoder, a recurrent neural network (RNN) with a Long-Short-Term-Memory (LSTM) layer, and a Deep Neural Network (DNN). This data-driven framework considers the temporal behavior of a generic physical system that extracts features from the time series of the sensor measurements that can be used for detecting covert attacks, distinguishing them from equipment faults, as well as localize the attack/fault. We evaluate the performance of the proposed method through a realistic simulation study on the IEEE 14-bus model as a typical example of ICS. We compare the performance of the proposed method with the traditional model-based method to show its applicability and efficacy.
High Dimensional Bayesian Optimization Assisted by Principal Component Analysis
Jul 02, 2020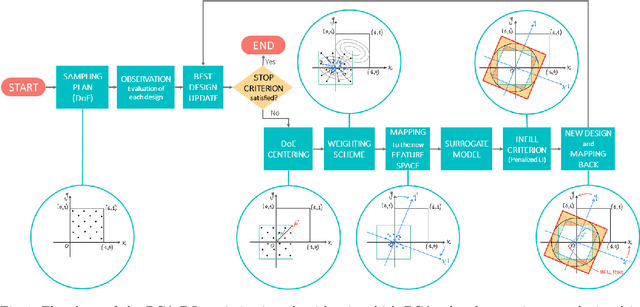
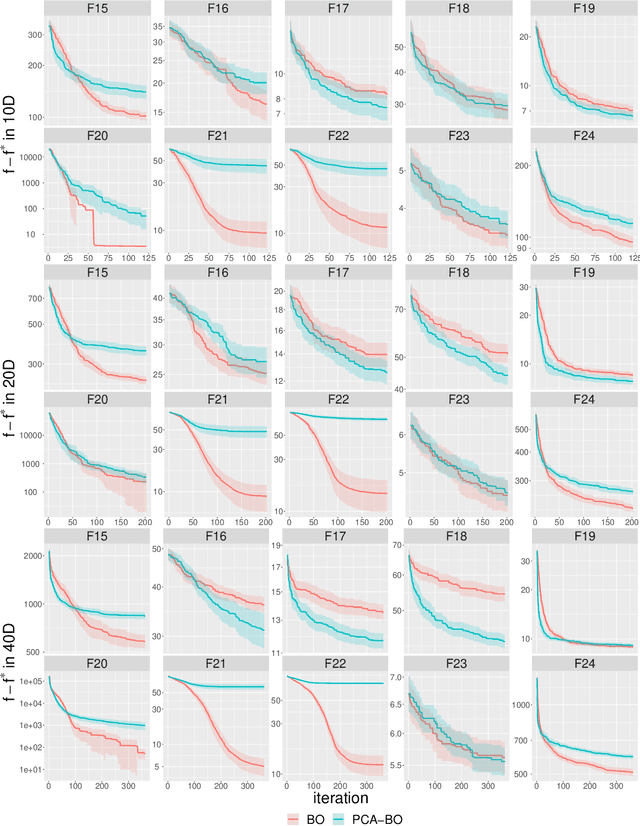
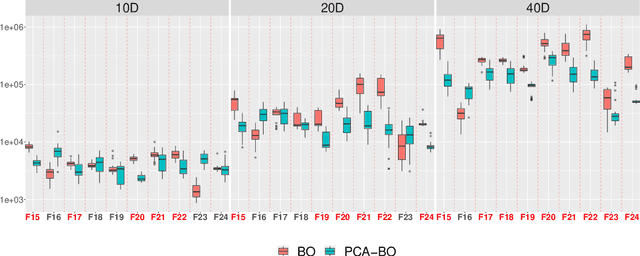
Bayesian Optimization (BO) is a surrogate-assisted global optimization technique that has been successfully applied in various fields, e.g., automated machine learning and design optimization. Built upon a so-called infill-criterion and Gaussian Process regression (GPR), the BO technique suffers from a substantial computational complexity and hampered convergence rate as the dimension of the search spaces increases. Scaling up BO for high-dimensional optimization problems remains a challenging task. In this paper, we propose to tackle the scalability of BO by hybridizing it with a Principal Component Analysis (PCA), resulting in a novel PCA-assisted BO (PCA-BO) algorithm. Specifically, the PCA procedure learns a linear transformation from all the evaluated points during the run and selects dimensions in the transformed space according to the variability of evaluated points. We then construct the GPR model, and the infill-criterion in the space spanned by the selected dimensions. We assess the performance of our PCA-BO in terms of the empirical convergence rate and CPU time on multi-modal problems from the COCO benchmark framework. The experimental results show that PCA-BO can effectively reduce the CPU time incurred on high-dimensional problems, and maintains the convergence rate on problems with an adequate global structure. PCA-BO therefore provides a satisfactory trade-off between the convergence rate and computational efficiency opening new ways to benefit from the strength of BO approaches in high dimensional numerical optimization.
Cross-language sentiment analysis of European Twitter messages duringthe COVID-19 pandemic
Aug 27, 2020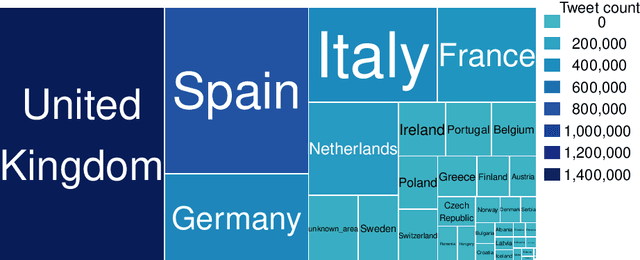
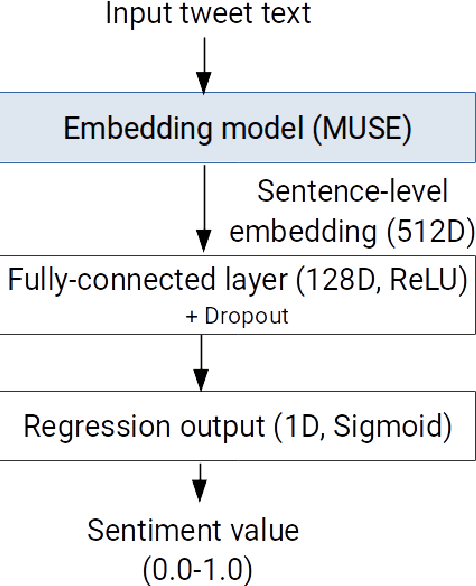
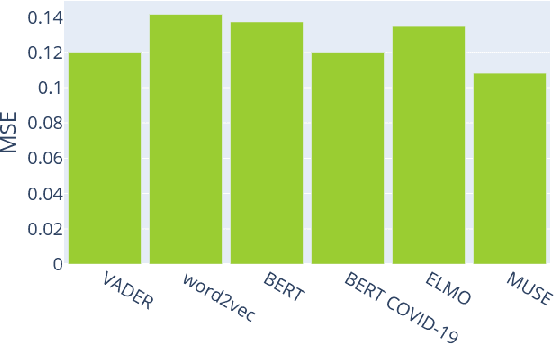
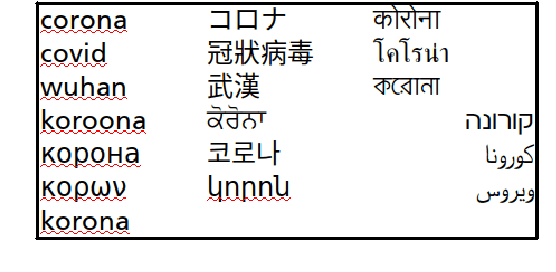
Social media data can be a very salient source of information during crises. User-generated messages provide a window into people's minds during such times, allowing us insights about their moods and opinions. Due to the vast amounts of such messages, a large-scale analysis of population-wide developments becomes possible. In this paper, we analyze Twitter messages (tweets) collected during the first months of the COVID-19 pandemic in Europe with regard to their sentiment. This is implemented with a neural network for sentiment analysis using multilingual sentence embeddings. We separate the results by country of origin, and correlate their temporal development with events in those countries. This allows us to study the effect of the situation on people's moods. We see, for example, that lockdown announcements correlate with a deterioration of mood in almost all surveyed countries, which recovers within a short time span.
NITES: A Non-Parametric Interpretable Texture Synthesis Method
Sep 02, 2020

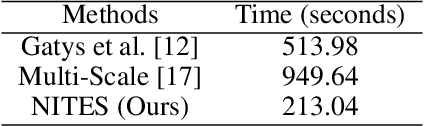
A non-parametric interpretable texture synthesis method, called the NITES method, is proposed in this work. Although automatic synthesis of visually pleasant texture can be achieved by deep neural networks nowadays, the associated generation models are mathematically intractable and their training demands higher computational cost. NITES offers a new texture synthesis solution to address these shortcomings. NITES is mathematically transparent and efficient in training and inference. The input is a single exemplary texture image. The NITES method crops out patches from the input and analyzes the statistical properties of these texture patches to obtain their joint spatial-spectral representations. Then, the probabilistic distributions of samples in the joint spatial-spectral spaces are characterized. Finally, numerous texture images that are visually similar to the exemplary texture image can be generated automatically. Experimental results are provided to show the superior quality of generated texture images and efficiency of the proposed NITES method in terms of both training and inference time.