 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
MStream: Fast Streaming Multi-Aspect Group Anomaly Detection
Sep 17, 2020

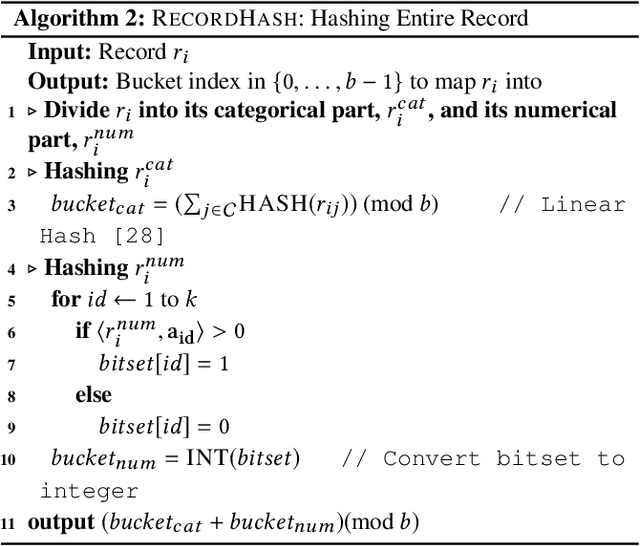
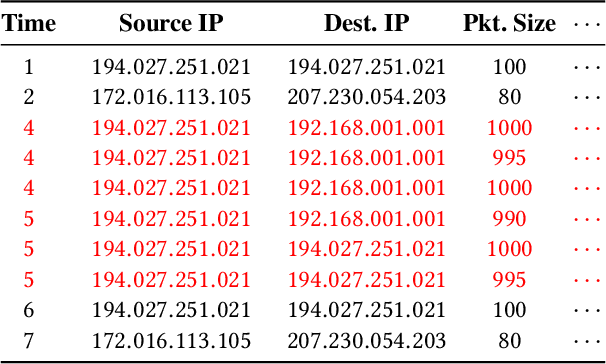
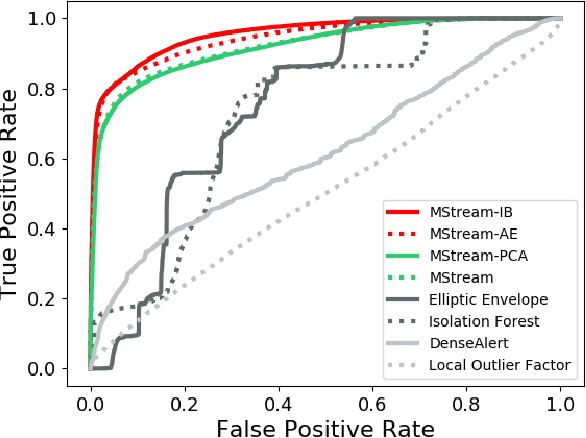
Given a stream of entries in a multi-aspect data setting i.e., entries having multiple dimensions, how can we detect anomalous activities? For example, in the intrusion detection setting, existing work seeks to detect anomalous events or edges in dynamic graph streams, but this does not allow us to take into account additional attributes of each entry. Our work aims to define a streaming multi-aspect data anomaly detection framework, termed MStream, which can detect unusual group anomalies as they occur, in a dynamic manner. MStream has the following properties: (a) it detects anomalies in multi-aspect data including both categorical and numeric attributes; (b) it is online, thus processing each record in constant time and constant memory; (c) it can capture the correlation between multiple aspects of the data. MStream is evaluated over the KDDCUP99, CICIDS-DoS, UNSW-NB 15 and CICIDS-DDoS datasets, and outperforms state-of-the-art baselines.
A Computational Approach to Understanding Empathy Expressed in Text-Based Mental Health Support
Sep 17, 2020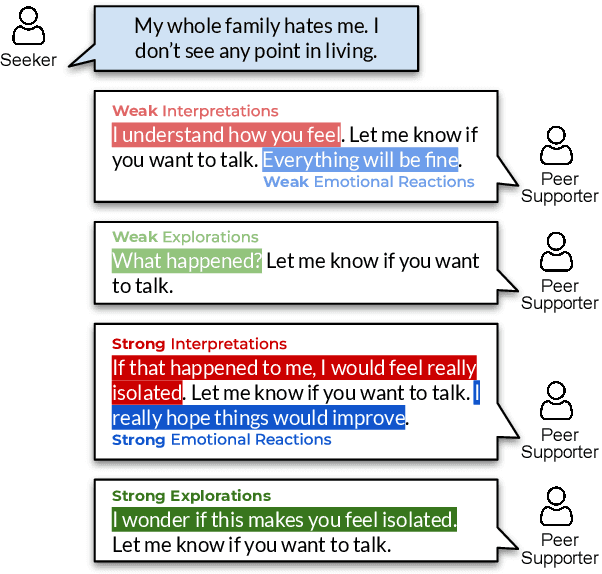
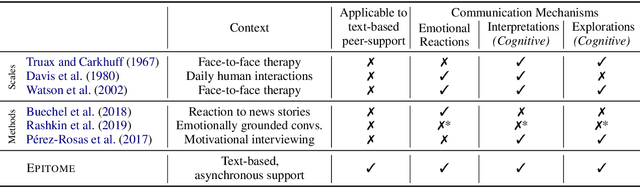
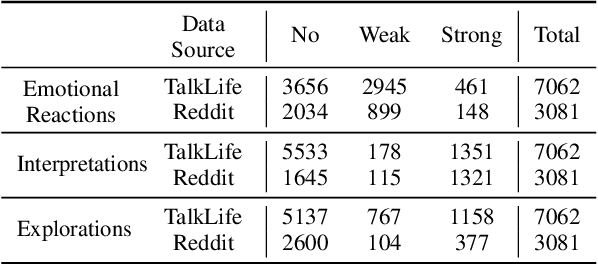
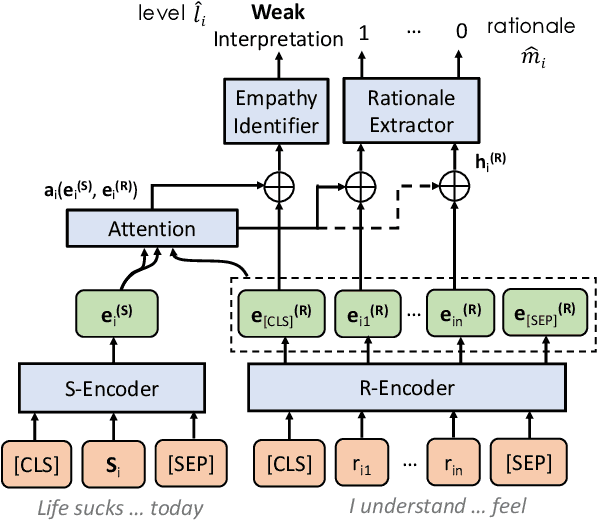
Empathy is critical to successful mental health support. Empathy measurement has predominantly occurred in synchronous, face-to-face settings, and may not translate to asynchronous, text-based contexts. Because millions of people use text-based platforms for mental health support, understanding empathy in these contexts is crucial. In this work, we present a computational approach to understanding how empathy is expressed in online mental health platforms. We develop a novel unifying theoretically-grounded framework for characterizing the communication of empathy in text-based conversations. We collect and share a corpus of 10k (post, response) pairs annotated using this empathy framework with supporting evidence for annotations (rationales). We develop a multi-task RoBERTa-based bi-encoder model for identifying empathy in conversations and extracting rationales underlying its predictions. Experiments demonstrate that our approach can effectively identify empathic conversations. We further apply this model to analyze 235k mental health interactions and show that users do not self-learn empathy over time, revealing opportunities for empathy training and feedback.
DartMinHash: Fast Sketching for Weighted Sets
May 23, 2020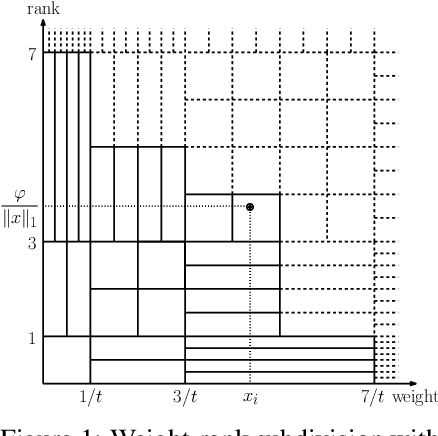
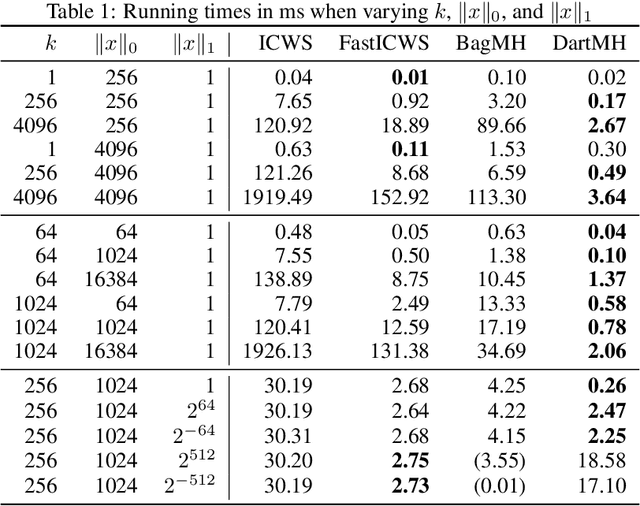
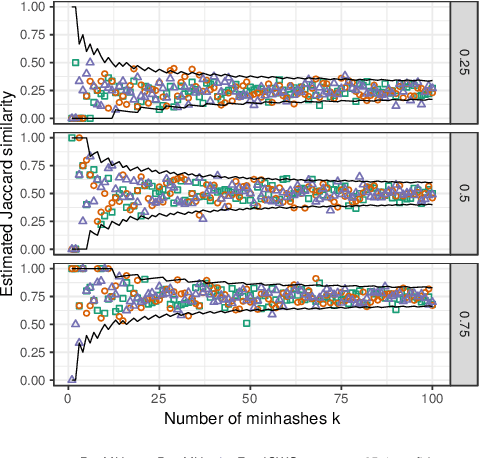
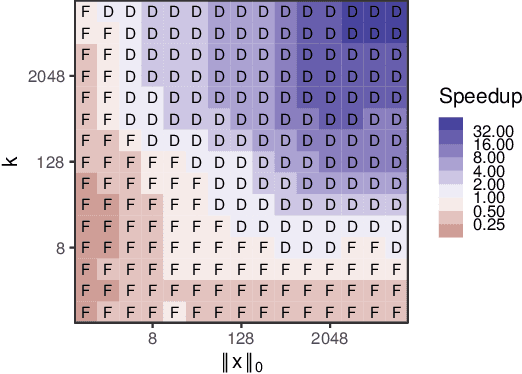
Weighted minwise hashing is a standard dimensionality reduction technique with applications to similarity search and large-scale kernel machines. We introduce a simple algorithm that takes a weighted set $x \in \mathbb{R}_{\geq 0}^{d}$ and computes $k$ independent minhashes in expected time $O(k \log k + \Vert x \Vert_{0}\log( \Vert x \Vert_1 + 1/\Vert x \Vert_1))$, improving upon the state-of-the-art BagMinHash algorithm (KDD '18) and representing the fastest weighted minhash algorithm for sparse data. Our experiments show running times that scale better with $k$ and $\Vert x \Vert_0$ compared to ICWS (ICDM '10) and BagMinhash, obtaining $10$x speedups in common use cases. Our approach also gives rise to a technique for computing fully independent locality-sensitive hash values for $(L, K)$-parameterized approximate near neighbor search under weighted Jaccard similarity in optimal expected time $O(LK + \Vert x \Vert_0)$, improving on prior work even in the case of unweighted sets.
Privacy Preserving Set-Based Estimation Using Partially Homomorphic Encryption
Oct 19, 2020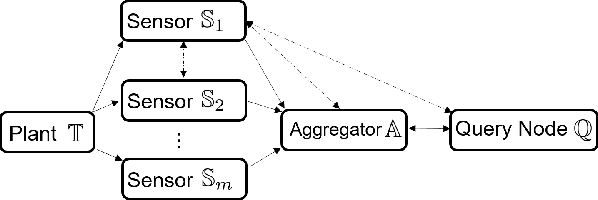
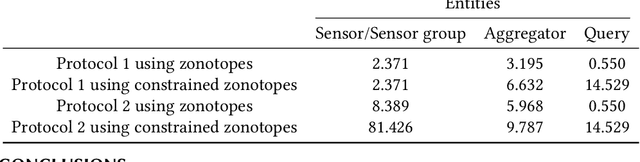
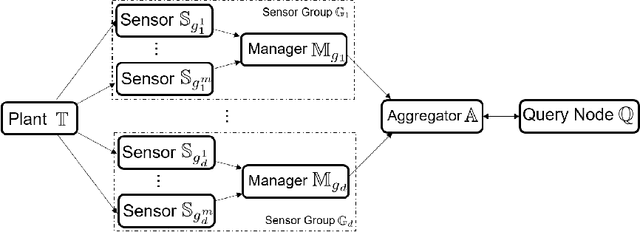
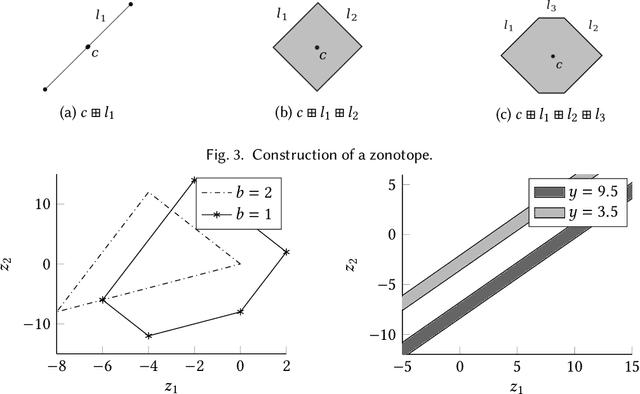
Set-based estimation has gained a lot of attention due to its ability to guarantee state enclosures for safety-critical systems. However, it requires computationally expensive operations, which in turn often requires outsourcing of these operations to cloud-computing platforms. Consequently, this raises some concerns with regard to sharing sensitive information and measurements. This paper presents the first privacy-preserving set-based estimation protocols using partially homomorphic encryption in which we preserve the privacy of the set of all possible estimates and the measurements. We consider a linear discrete-time dynamical system with bounded modeling and measurement uncertainties without any other statistical assumptions. We represent sets by zonotopes and constrained zonotopes as they can compactly represent high-dimensional sets and are closed under linear maps and Minkowski addition. By selectively encrypting some parameters of the used set representations, we are able to intersect sets in the encrypted domain, which enables guaranteed state estimation while ensuring the privacy goals. In particular, we show that our protocols achieve computational privacy using formal cryptographic definitions of computational indistinguishability. We demonstrate the efficiency of our approach by localizing a mobile quadcopter using custom ultra-wideband wireless devices. Our code and data are available online.
Characterizing Policy Divergence for Personalized Meta-Reinforcement Learning
Oct 09, 2020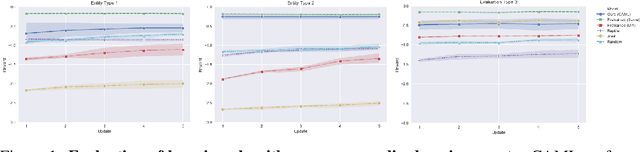
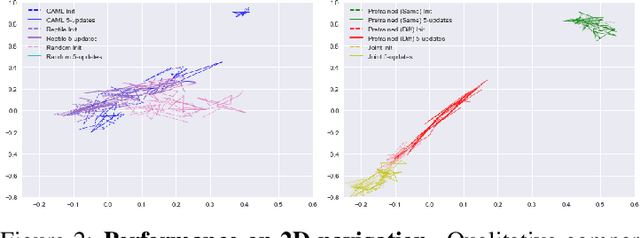
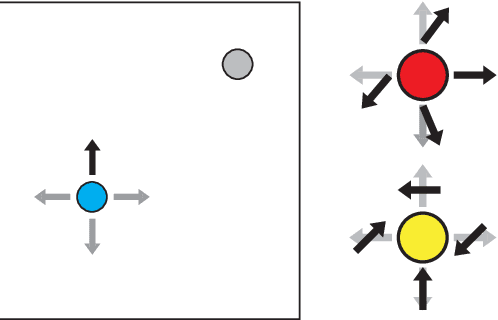
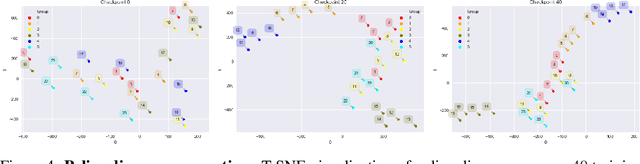
Despite ample motivation from costly exploration and limited trajectory data, rapidly adapting to new environments with few-shot reinforcement learning (RL) can remain a challenging task, especially with respect to personalized settings. Here, we consider the problem of recommending optimal policies to a set of multiple entities each with potentially different characteristics, such that individual entities may parameterize distinct environments with unique transition dynamics. Inspired by existing literature in meta-learning, we extend previous work by focusing on the notion that certain environments are more similar to each other than others in personalized settings, and propose a model-free meta-learning algorithm that prioritizes past experiences by relevance during gradient-based adaptation. Our algorithm involves characterizing past policy divergence through methods in inverse reinforcement learning, and we illustrate how such metrics are able to effectively distinguish past policy parameters by the environment they were deployed in, leading to more effective fast adaptation during test time. To study personalization more effectively we introduce a navigation testbed to specifically incorporate environment diversity across training episodes, and demonstrate that our approach outperforms meta-learning alternatives with respect to few-shot reinforcement learning in personalized settings.
Combining Control Barrier Functions and Behavior Trees for Multi-Agent Underwater Coverage Missions
Aug 21, 2020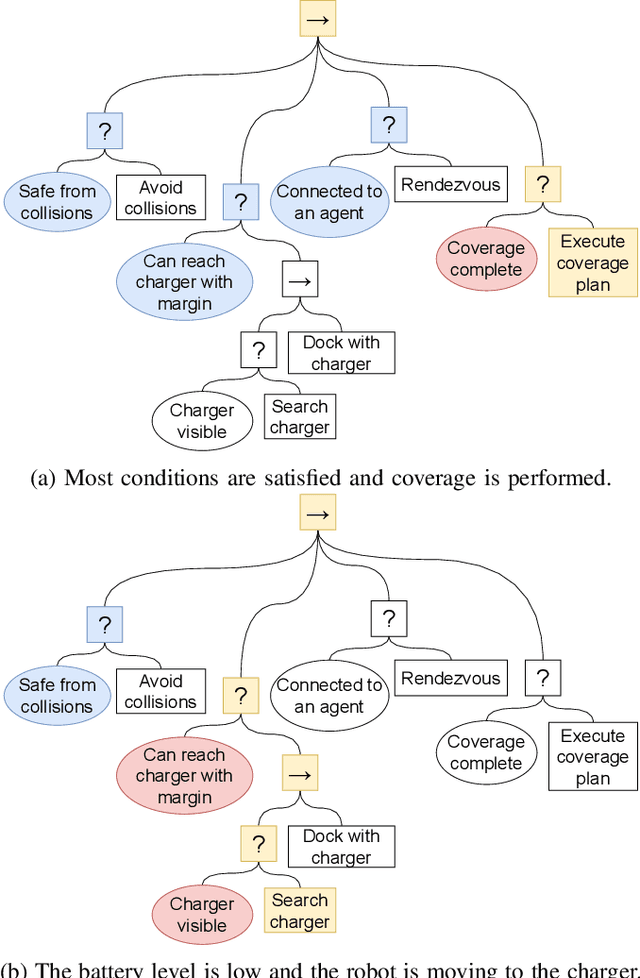
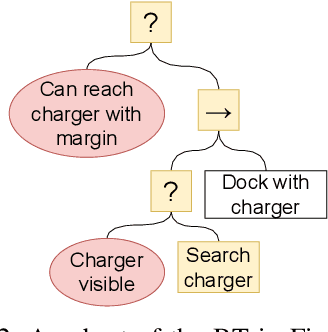
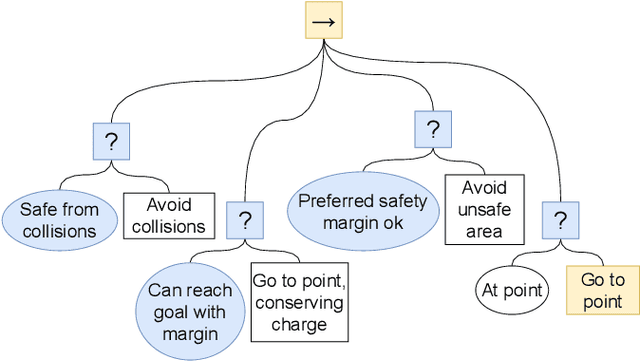
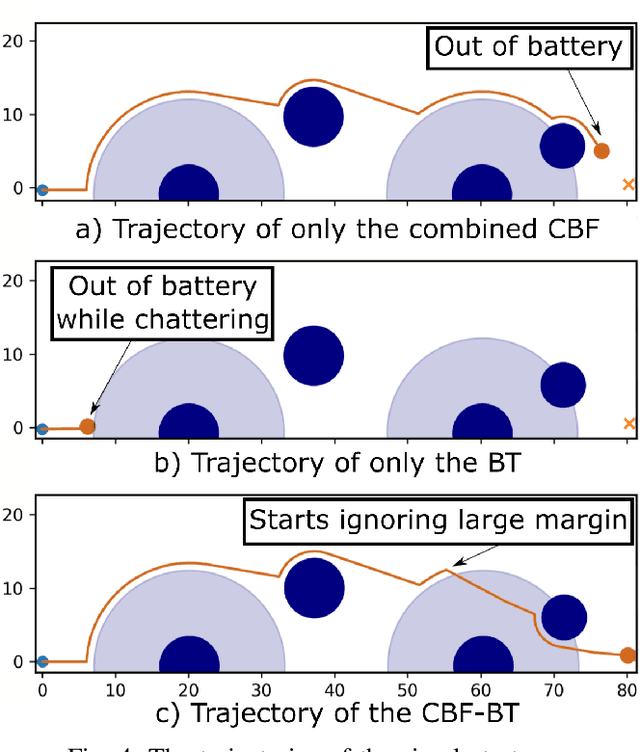
Robot missions typically involve a number of desired objectives, such as avoiding collisions, staying connected to other robots, gathering information using sensors and returning to the charging station before the battery runs out. Some of these objectives need to be taken into account at the same time, such as avoiding collisions and staying connected, while others are focused upon during different parts of the executions, such as returning to the charging station and connectivity maintenance. In this paper, we show how Control Barrier Functions(CBFs) and Behavior Trees(BTs) can be combined in a principled manner to achieve both types of task compositions, with performance guarantees in terms of mission completion. We illustrate our method with a simulated underwater coverage mission.
Hindsight Experience Replay with Kronecker Product Approximate Curvature
Oct 09, 2020
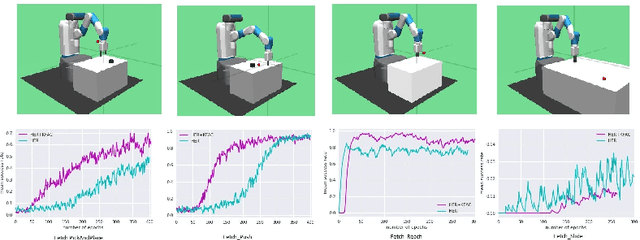

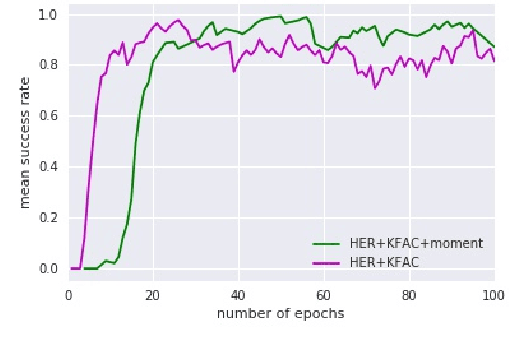
Hindsight Experience Replay (HER) is one of the efficient algorithm to solve Reinforcement Learning tasks related to sparse rewarded environments.But due to its reduced sample efficiency and slower convergence HER fails to perform effectively. Natural gradients solves these challenges by converging the model parameters better. It avoids taking bad actions that collapse the training performance. However updating parameters in neural networks requires expensive computation and thus increase in training time. Our proposed method solves the above mentioned challenges with better sample efficiency and faster convergence with increased success rate. A common failure mode for DDPG is that the learned Q-function begins to dramatically overestimate Q-values, which then leads to the policy breaking, because it exploits the errors in the Q-function. We solve this issue by including Twin Delayed Deep Deterministic Policy Gradients(TD3) in HER. TD3 learns two Q-functions instead of one and it adds noise tothe target action, to make it harder for the policy to exploit Q-function errors. The experiments are done with the help of OpenAis Mujoco environments. Results on these environments show that our algorithm (TDHER+KFAC) performs better inmost of the scenarios
A Reactive Autonomous Camera System for the RAVEN II Surgical Robot
Oct 09, 2020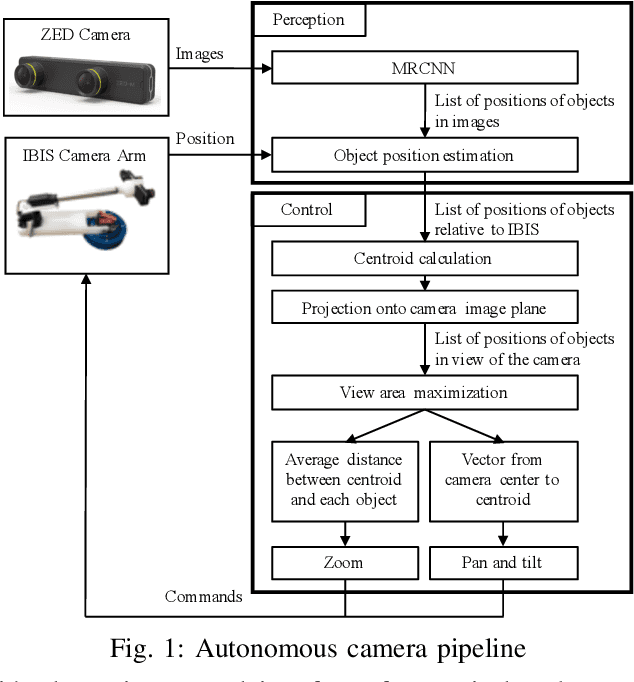
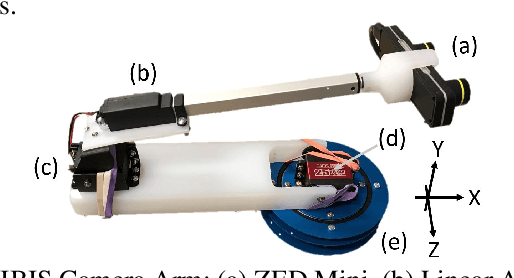
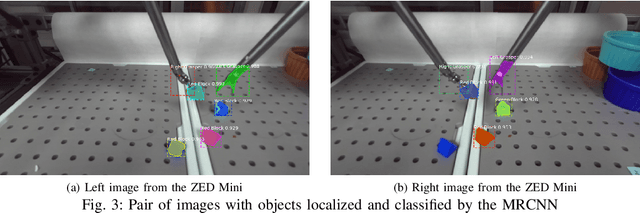
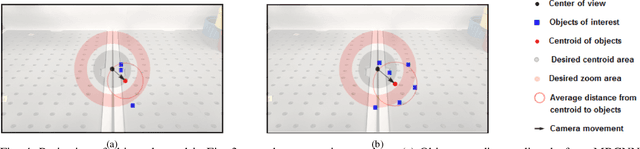
The endoscopic camera of a surgical robot provides surgeons with a magnified 3D view of the surgical field, but repositioning it increases mental workload and operation time. Poor camera placement contributes to safety-critical events when surgical tools move out of the view of the camera. This paper presents a proof of concept of an autonomous camera system for the Raven II surgical robot that aims to reduce surgeon workload and improve safety by providing an optimal view of the workspace showing all objects of interest. This system uses transfer learning to localize and classify objects of interest within the view of a stereoscopic camera. The positions and centroid of the objects are estimated and a set of control rules determines the movement of the camera towards a more desired view. Our perception module had an accuracy of 61.21% overall for identifying objects of interest and was able to localize both graspers and multiple blocks in the environment. Comparison of the commands proposed by our system with the desired commands from a survey of 13 participants indicates that the autonomous camera system proposes appropriate movements for the tilt and pan of the camera.
DENS-ECG: A Deep Learning Approach for ECG Signal Delineation
May 18, 2020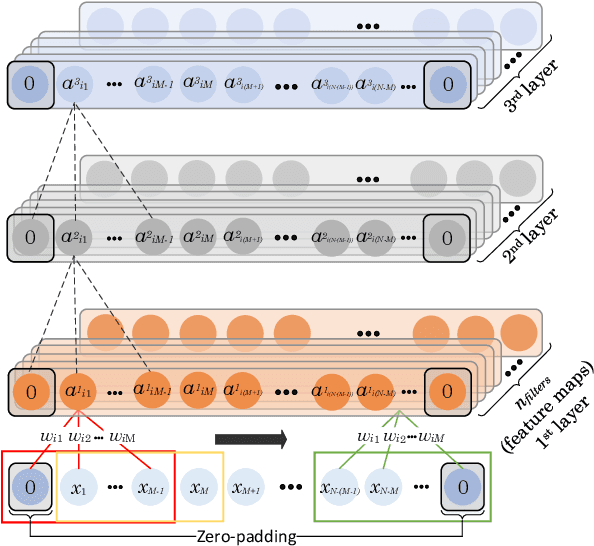

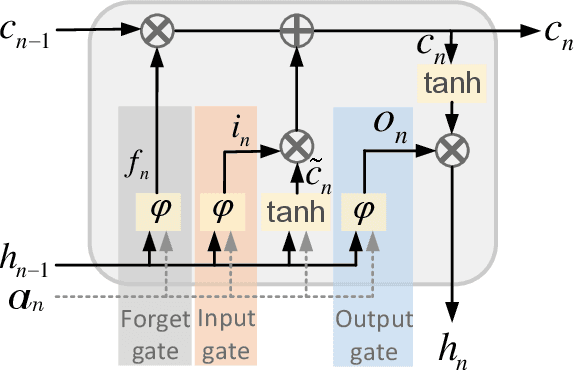
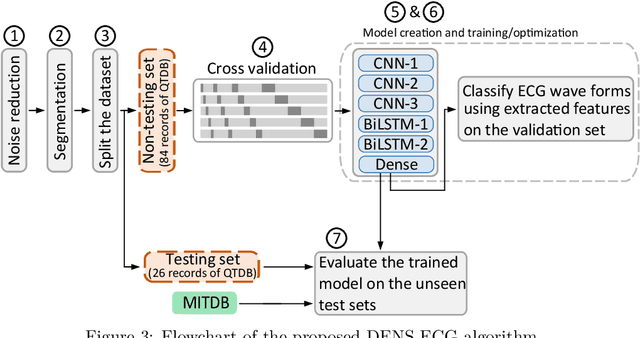
Objectives: With the technological advancements in the field of tele-health monitoring, it is now possible to gather huge amounts of electro-physiological signals such as electrocardiogram (ECG). It is therefore necessary to develop models/algorithms that are capable of analysing these massive amounts of data in real-time. This paper proposes a deep learning model for real-time segmentation of heartbeats. Methods: The proposed algorithm, named as the DENS-ECG algorithm, combines convolutional neural network (CNN) and long short-term memory (LSTM) model to detect onset, peak, and offset of different heartbeat waveforms such as the P-wave, QRS complex, T-wave, and No wave (NW). Using ECG as the inputs, the model learns to extract high level features through the training process, which, unlike other classical machine learning based methods, eliminates the feature engineering step. Results: The proposed DENS-ECG model was trained and validated on a dataset with 105 ECGs of length 15 minutes each and achieved an average sensitivity and precision of 97.95% and 95.68%, respectively, using a 5-fold cross validation. Additionally, the model was evaluated on an unseen dataset to examine its robustness in QRS detection, which resulted in a sensitivity of 99.61% and precision of 99.52%. Conclusion: The empirical results show the flexibility and accuracy of the combined CNN-LSTM model for ECG signal delineation. Significance: This paper proposes an efficient and easy to use approach using deep learning for heartbeat segmentation, which could potentially be used in real-time tele-health monitoring systems.
SigNet: An Advanced Deep Learning Framework for Radio Signal Classification
Oct 28, 2020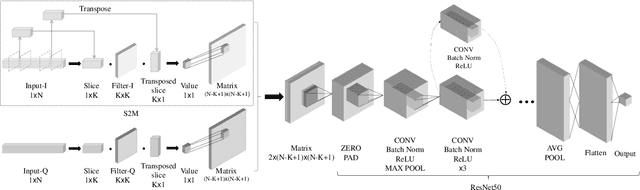
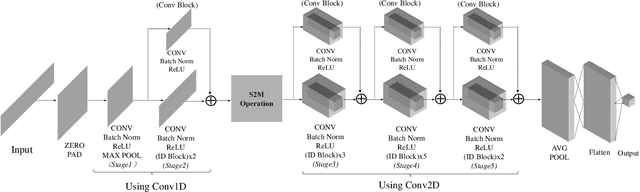
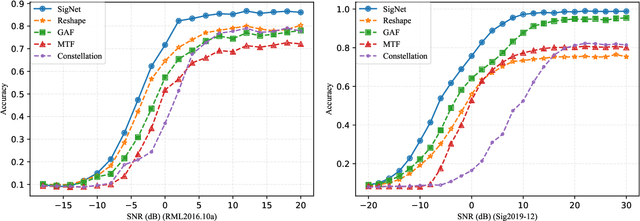
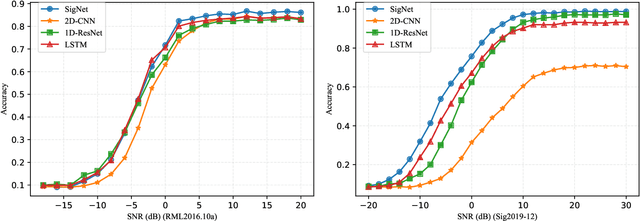
Deep learning methods achieve great success in many areas due to their powerful feature extraction capabilities and end-to-end training mechanism, and recently they are also introduced for radio signal modulation classification. In this paper, we propose a novel deep learning framework called SigNet, where a signal-to-matrix (S2M) operator is adopted to convert the original signal into a square matrix first and is co-trained with a follow-up CNN architecture for classification. This model is further accelerated by integrating 1D convolution operators, leading to the upgraded model SigNet2.0. The experiments on two signal datasets show that both SigNet and SigNet2.0 outperform a number of well-known baselines, achieving the state-of-the-art performance. Notably, they obtain significantly higher accuracy than 1D-ResNet and 2D-CNN (at most increasing 70.5\%), while much faster than LSTM (at most saving 88.0\% training time). More interestingly, our proposed models behave extremely well in few-shot learning when a small training data set is provided. They can achieve a relatively high accuracy even when 1\% training data are kept, while other baseline models may lose their effectiveness much more quickly as the datasets get smaller. Such result suggests that SigNet/SigNet2.0 could be extremely useful in the situations where labeled signal data are difficult to obtain.