 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Winning with Simple Learning Models: Detecting Earthquakes in Groningen, the Netherlands
Jul 08, 2020
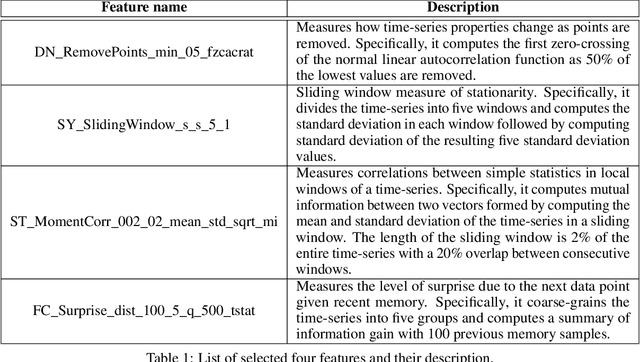
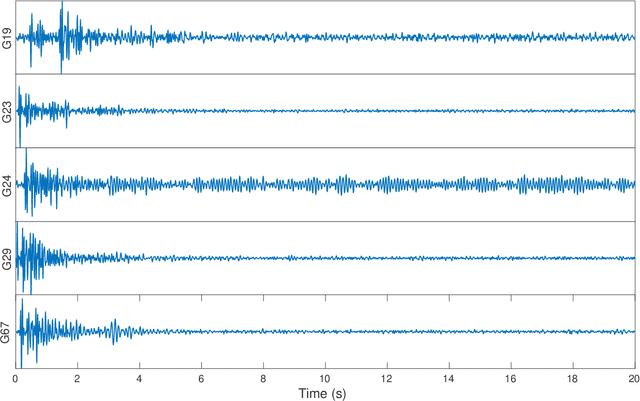
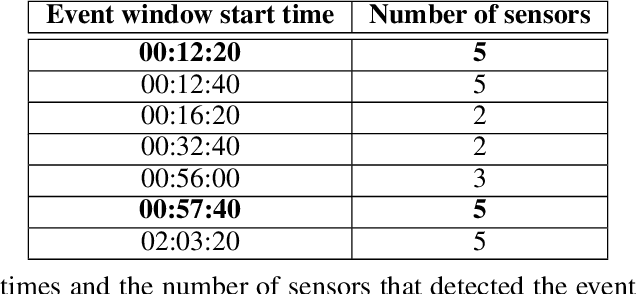
Deep learning is fast emerging as a potential disruptive tool to tackle longstanding research problems across the sciences. Notwithstanding its success across disciplines, the recent trend of the overuse of deep learning is concerning to many machine learning practitioners. Recently, seismologists have also demonstrated the efficacy of deep learning algorithms in detecting low magnitude earthquakes. Here, we revisit the problem of seismic event detection but using a logistic regression model with feature extraction. We select well-discriminating features from a huge database of time-series operations collected from interdisciplinary time-series analysis methods. Using a simple learning model with only five trainable parameters, we detect several low-magnitude induced earthquakes from the Groningen gas field that are not present in the catalog. We note that the added advantage of simpler models is that the selected features add to our understanding of the noise and event classes present in the dataset. Since simpler models are easy to maintain, debug, understand, and train, through this study we underscore that it might be a dangerous pursuit to use deep learning without carefully weighing simpler alternatives.
Can Human Sex Be Learned Using Only 2D Body Keypoint Estimations?
Nov 05, 2020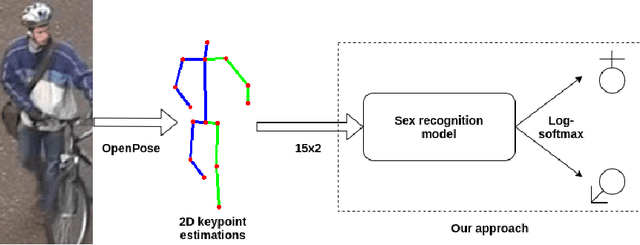
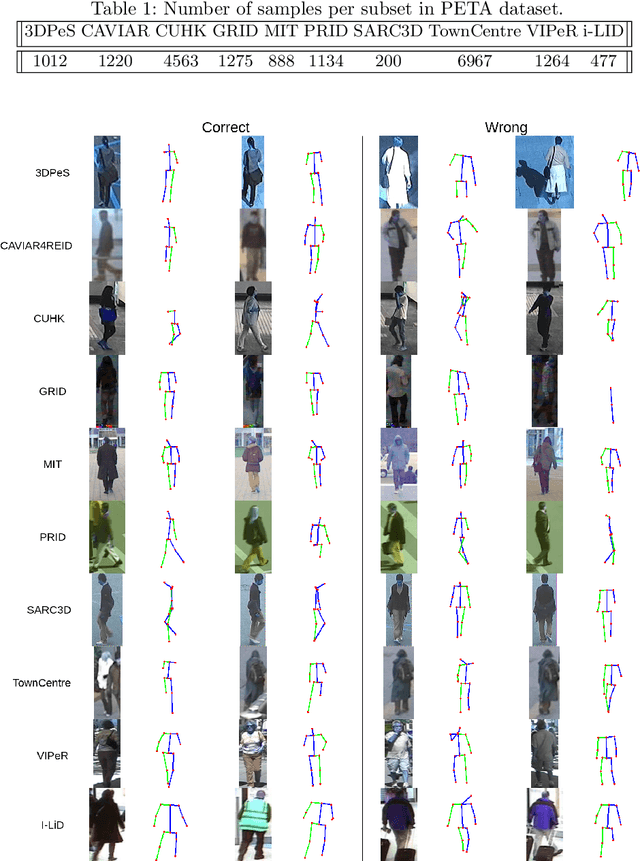
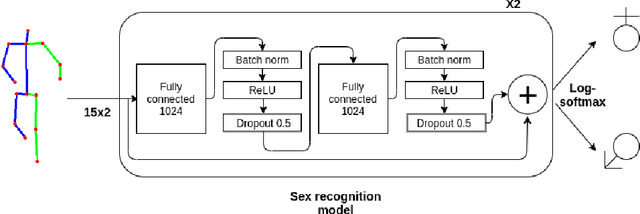
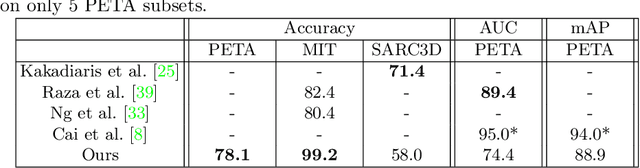
In this paper, we analyze human male and female sex recognition problem and present a fully automated classification system using only 2D keypoints. The keypoints represent human joints. A keypoint set consists of 15 joints and the keypoint estimations are obtained using an OpenPose 2D keypoint detector. We learn a deep learning model to distinguish males and females using the keypoints as input and binary labels as output. We use two public datasets in the experimental section - 3DPeople and PETA. On PETA dataset, we report a 77% accuracy. We provide model performance details on both PETA and 3DPeople. To measure the effect of noisy 2D keypoint detections on the performance, we run separate experiments on 3DPeople ground truth and noisy keypoint data. Finally, we extract a set of factors that affect the classification accuracy and propose future work. The advantage of the approach is that the input is small and the architecture is simple, which enables us to run many experiments and keep the real-time performance in inference. The source code, with the experiments and data preparation scripts, are available on GitHub (https://github.com/kristijanbartol/human-sex-classifier).
Time-Critical Dynamic Decision Making
Jan 23, 2013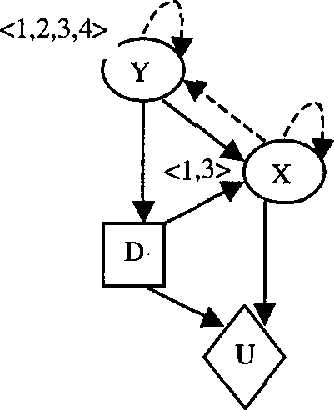
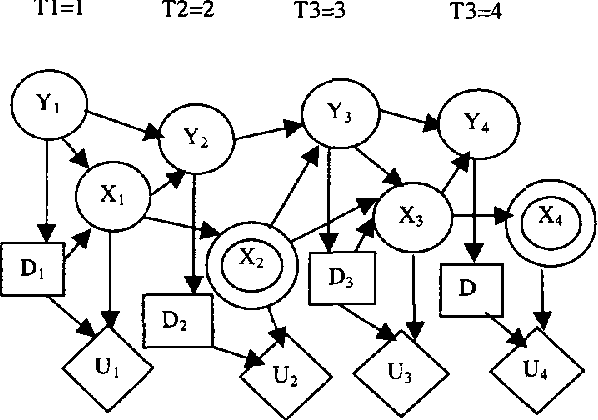
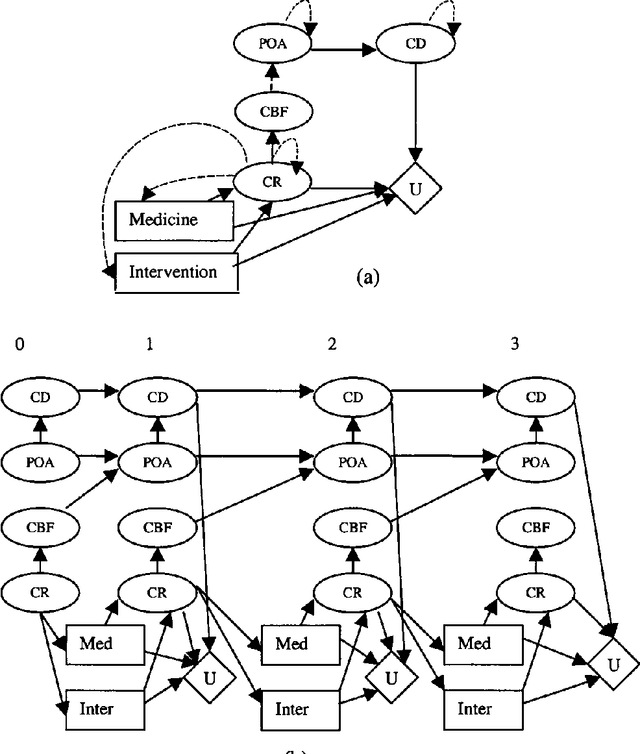
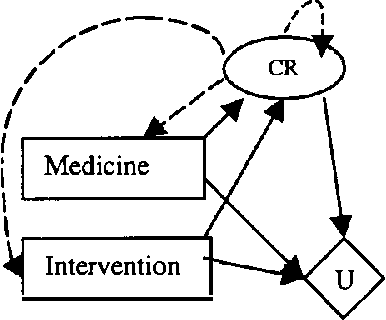
Recent interests in dynamic decision modeling have led to the development of several representation and inference methods. These methods however, have limited application under time critical conditions where a trade-off between model quality and computational tractability is essential. This paper presents an approach to time-critical dynamic decision modeling. A knowledge representation and modeling method called the time-critical dynamic influence diagram is proposed. The formalism has two forms. The condensed form is used for modeling and model abstraction, while the deployed form which can be converted from the condensed form is used for inference purposes. The proposed approach has the ability to represent space-temporal abstraction within the model. A knowledge-based meta-reasoning approach is proposed for the purpose of selecting the best abstracted model that provide the optimal trade-off between model quality and model tractability. An outline of the knowledge-based model construction algorithm is also provided.
Dyslexia detection from EEG signals using SSA component correlation and Convolutional Neural Networks
Oct 26, 2020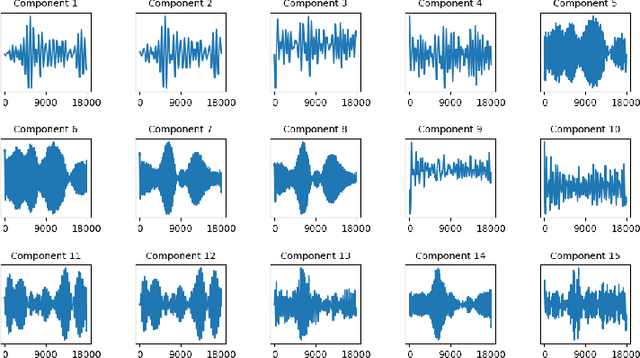
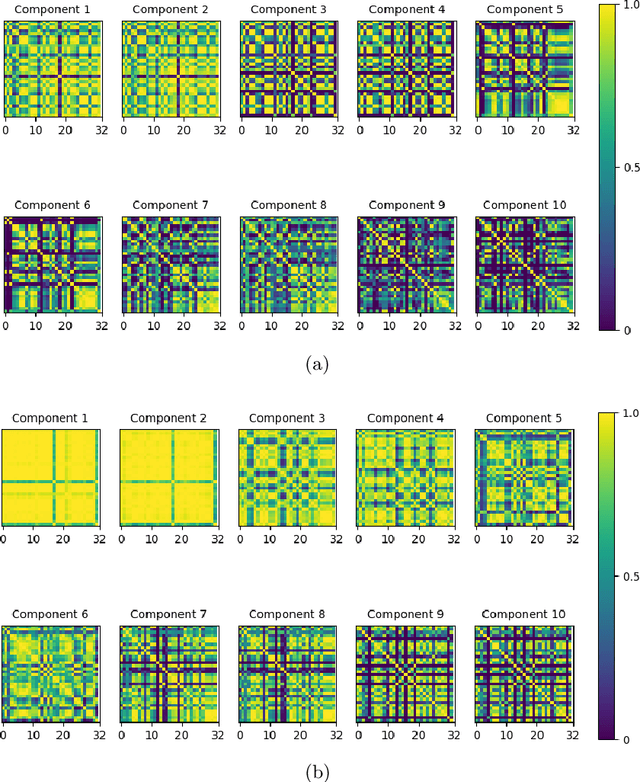
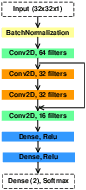
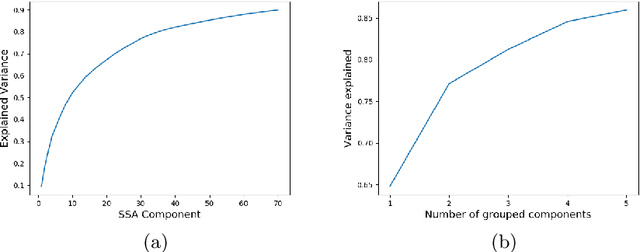
Objective dyslexia diagnosis is not a straighforward task since it is traditionally performed by means of the intepretation of different behavioural tests. Moreover, these tests are only applicable to readers. This way, early diagnosis requires the use of specific tasks not only related to reading. Thus, the use of Electroencephalography (EEG) constitutes an alternative for an objective and early diagnosis that can be used with pre-readers. In this way, the extraction of relevant features in EEG signals results crucial for classification. However, the identification of the most relevant features is not straighforward, and predefined statistics in the time or frequency domain are not always discriminant enough. On the other hand, classical processing of EEG signals based on extracting EEG bands frequency descriptors, usually make some assumptions on the raw signals that could cause indormation loosing. In this work we propose an alternative for analysis in the frequency domain based on Singluar Spectrum Analysis (SSA) to split the raw signal into components representing different oscillatory modes. Moreover, correlation matrices obtained for each component among EEG channels are classfied using a Convolutional Neural network.
Transfer learning of chaotic systems
Nov 15, 2020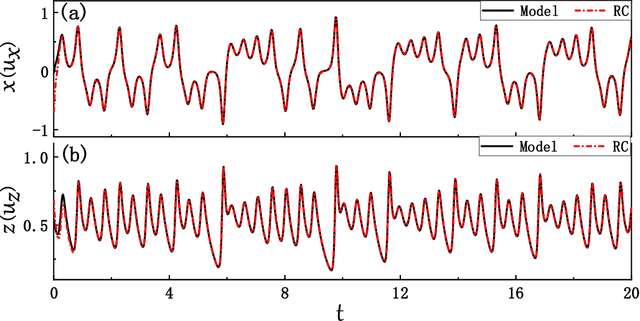
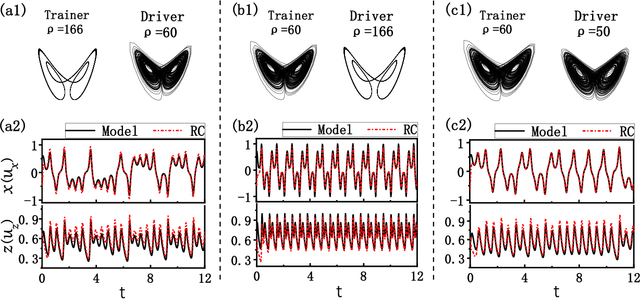
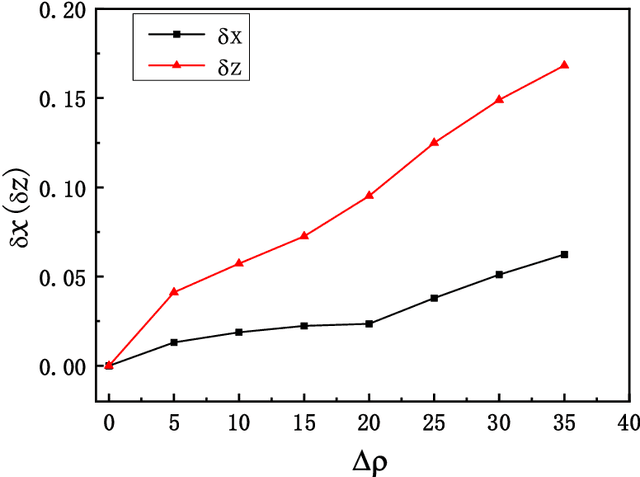
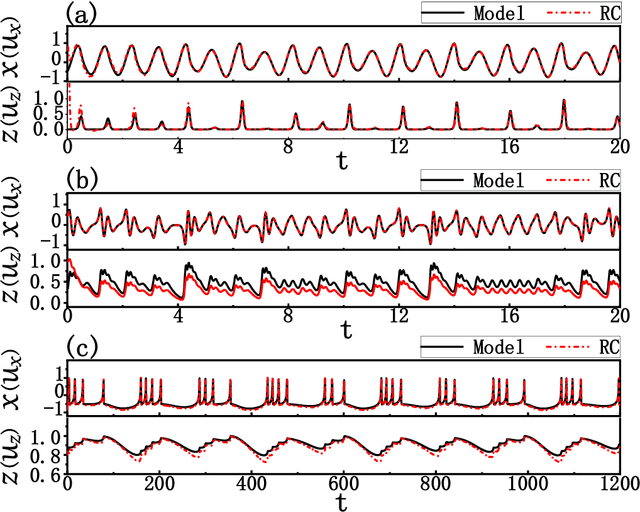
Can a neural network trained by the time series of system A be used to predict the evolution of system B? This problem, knowing as transfer learning in a broad sense, is of great importance in machine learning and data mining, yet has not been addressed for chaotic systems. Here we investigate transfer learning of chaotic systems from the perspective of synchronization-based state inference, in which a reservoir computer trained by chaotic system A is used to infer the unmeasured variables of chaotic system B, while A is different from B in either parameter or dynamics. It is found that if systems A and B are different in parameter, the reservoir computer can be well synchronized to system B. However, if systems A and B are different in dynamics, the reservoir computer fails to synchronize with system B in general. Knowledge transfer along a chain of coupled reservoir computers is also studied, and it is found that, although the reservoir computers are trained by different systems, the unmeasured variables of the driving system can be successfully inferred by the remote reservoir computer. Finally, by an experiment of chaotic pendulum, we show that the knowledge learned from the modeling system can be used to predict the evolution of the experimental system.
Recommender Engine for Continuous Time Quantum Monte Carlo Methods
Dec 06, 2016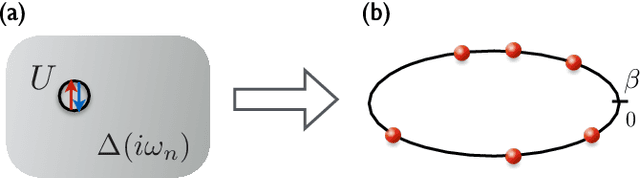
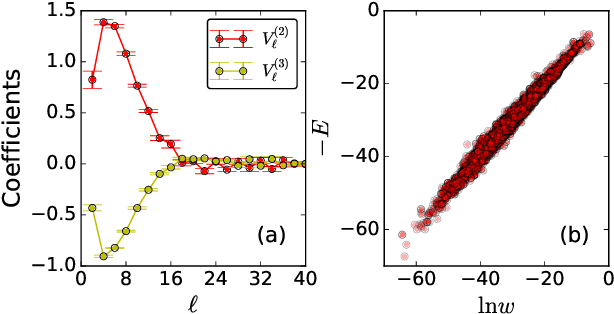
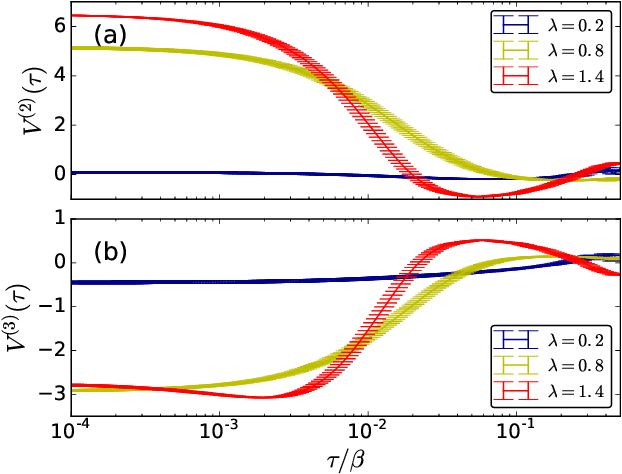
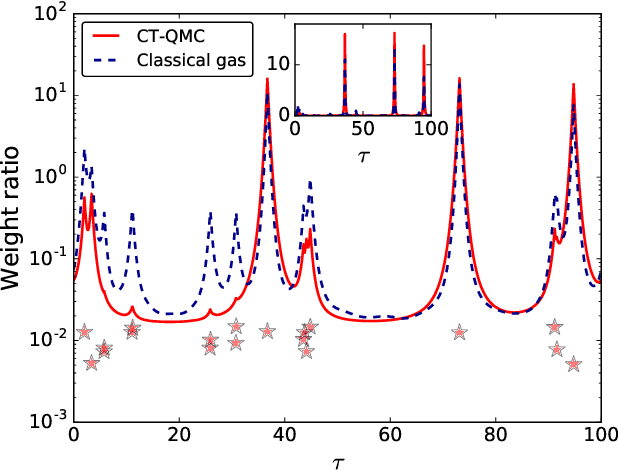
Recommender systems play an essential role in the modern business world. They recommend favorable items like books, movies, and search queries to users based on their past preferences. Applying similar ideas and techniques to Monte Carlo simulations of physical systems boosts their efficiency without sacrificing accuracy. Exploiting the quantum to classical mapping inherent in the continuous-time quantum Monte Carlo methods, we construct a classical molecular gas model to reproduce the quantum distributions. We then utilize powerful molecular simulation techniques to propose efficient quantum Monte Carlo updates. The recommender engine approach provides a general way to speed up the quantum impurity solvers.
* 4.5 pages + half page supplementary material
Exploring Contextualized Neural Language Models for Temporal Dependency Parsing
Apr 30, 2020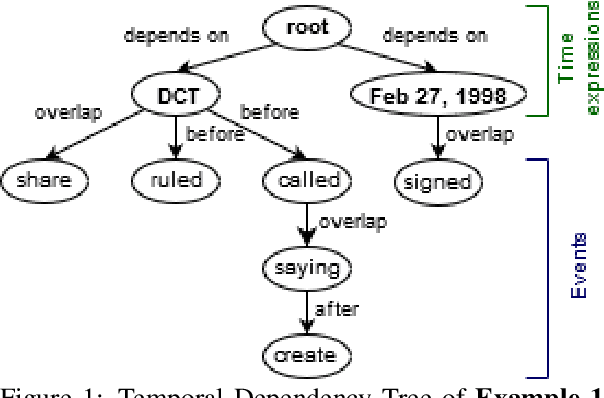
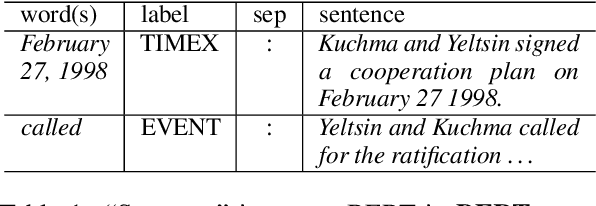
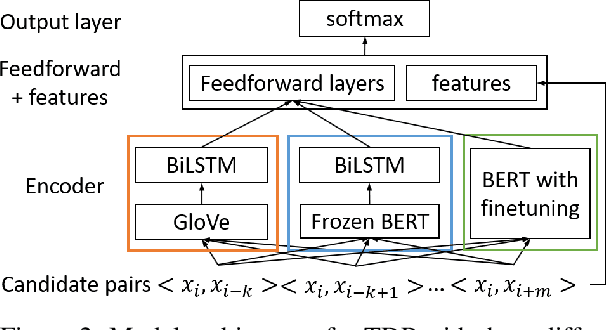
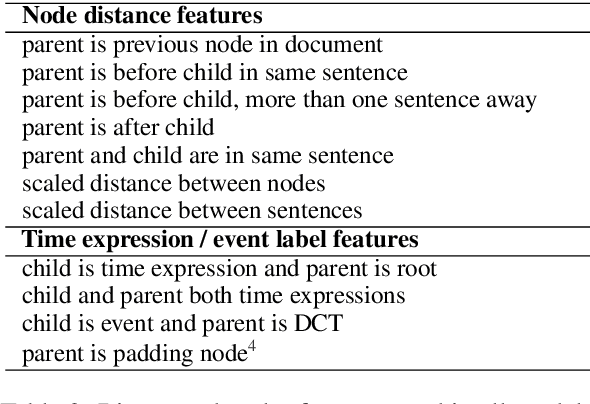
Extracting temporal relations between events and time expressions has many applications such as constructing event timelines and time-related question answering. It is a challenging problem that requires syntactic and semantic information at sentence or discourse levels, which may be captured by deep language models such as BERT (Devlin et al., 2019). In this paper, we developed several variants of BERT-based temporal dependency parser, and show that BERT significantly improves temporal dependency parsing (Zhang and Xue,2018a). Source code and trained models will be made available at github.com.
MorphEyes: Variable Baseline Stereo For Quadrotor Navigation
Nov 05, 2020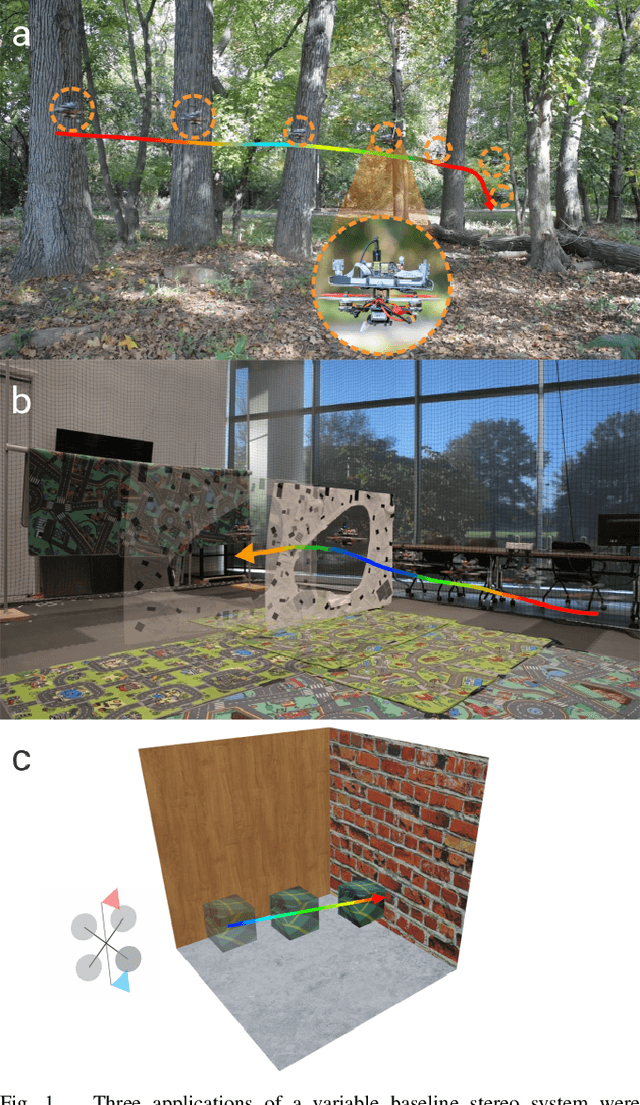
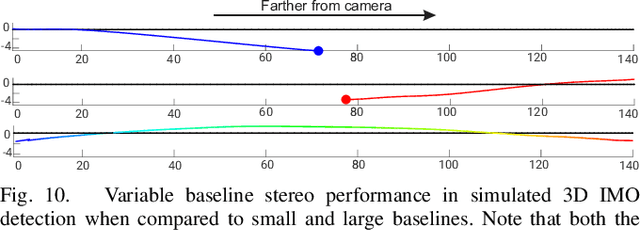
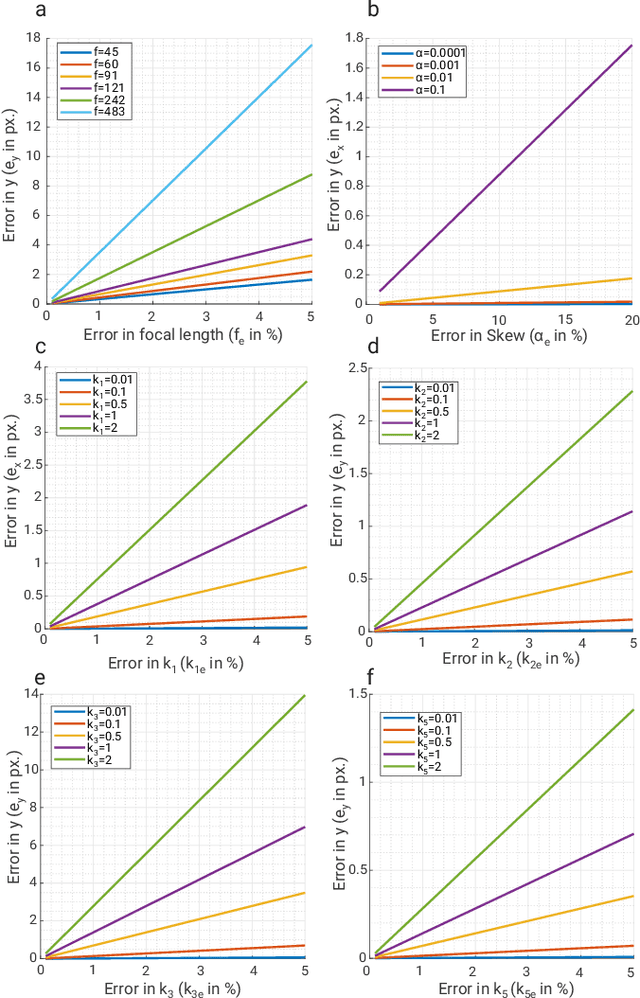
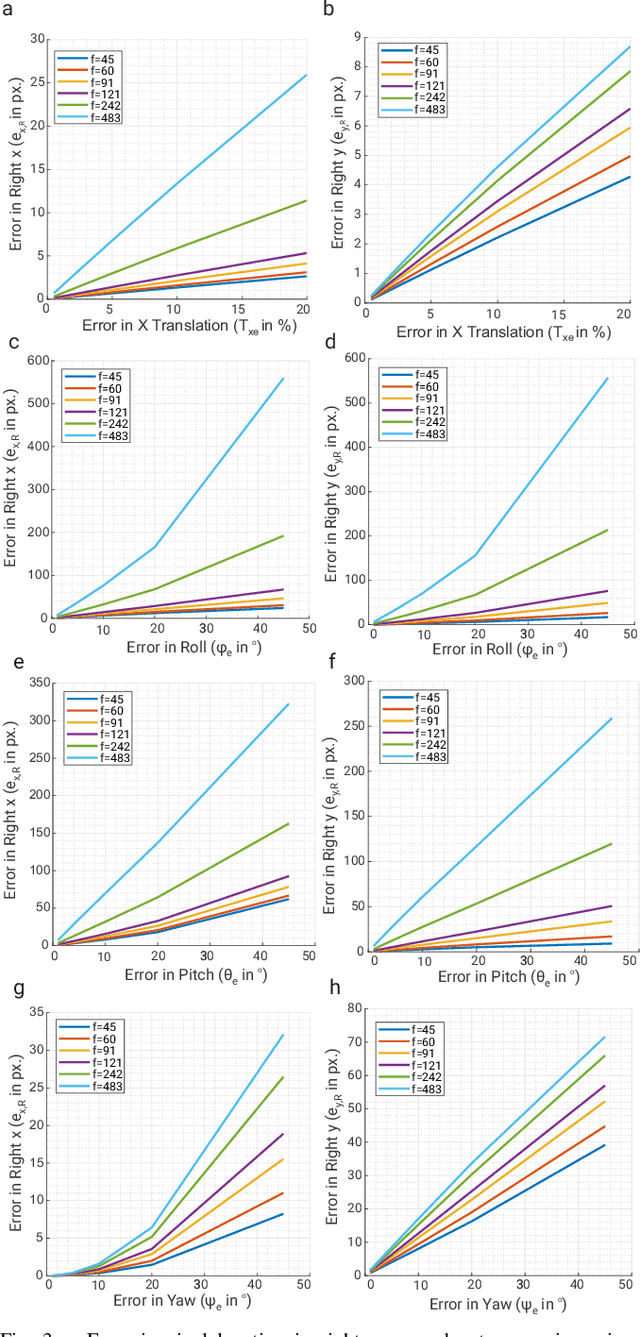
Morphable design and depth-based visual control are two upcoming trends leading to advancements in the field of quadrotor autonomy. Stereo-cameras have struck the perfect balance of weight and accuracy of depth estimation but suffer from the problem of depth range being limited and dictated by the baseline chosen at design time. In this paper, we present a framework for quadrotor navigation based on a stereo camera system whose baseline can be adapted on-the-fly. We present a method to calibrate the system at a small number of discrete baselines and interpolate the parameters for the entire baseline range. We present an extensive theoretical analysis of calibration and synchronization errors. We showcase three different applications of such a system for quadrotor navigation: (a) flying through a forest, (b) flying through an unknown shaped/location static/dynamic gap, and (c) accurate 3D pose detection of an independently moving object. We show that our variable baseline system is more accurate and robust in all three scenarios. To our knowledge, this is the first work that applies the concept of morphable design to achieve a variable baseline stereo vision system on a quadrotor.
Thinking While Moving: Deep Reinforcement Learning with Concurrent Control
Apr 17, 2020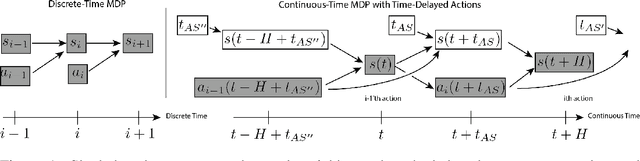
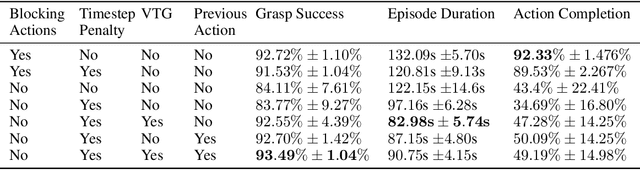
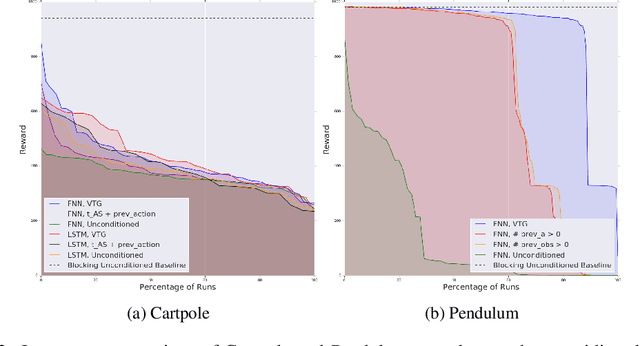

We study reinforcement learning in settings where sampling an action from the policy must be done concurrently with the time evolution of the controlled system, such as when a robot must decide on the next action while still performing the previous action. Much like a person or an animal, the robot must think and move at the same time, deciding on its next action before the previous one has completed. In order to develop an algorithmic framework for such concurrent control problems, we start with a continuous-time formulation of the Bellman equations, and then discretize them in a way that is aware of system delays. We instantiate this new class of approximate dynamic programming methods via a simple architectural extension to existing value-based deep reinforcement learning algorithms. We evaluate our methods on simulated benchmark tasks and a large-scale robotic grasping task where the robot must "think while moving".
A Flexible and Modular Body-Machine Interface for Individuals Living with Severe Disabilities
Jul 29, 2020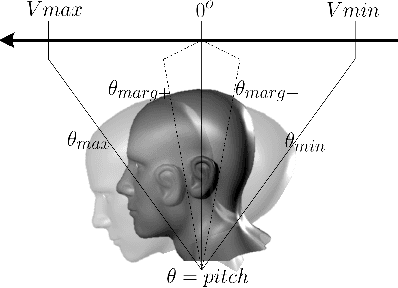
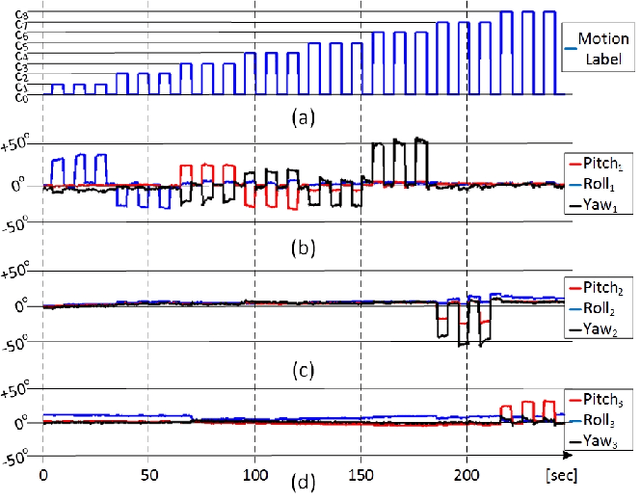
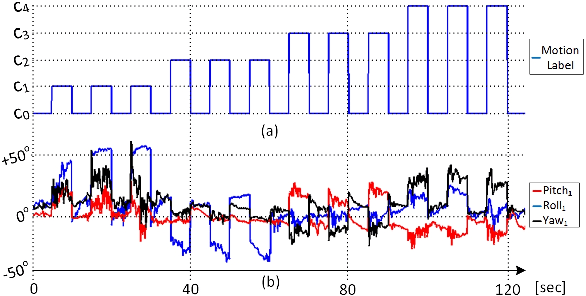
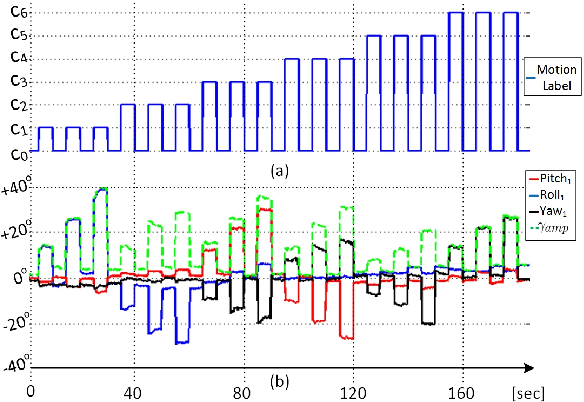
This paper presents a control interface to translate the residual body motions of individuals living with severe disabilities, into control commands for body-machine interaction. A custom, wireless, wearable multi-sensor network is used to collect motion data from multiple points on the body in real-time. The solution proposed successfully leverage electromyography gesture recognition techniques for the recognition of inertial measurement units-based commands (IMU), without the need for cumbersome and noisy surface electrodes. Motion pattern recognition is performed using a computationally inexpensive classifier (Linear Discriminant Analysis) so that the solution can be deployed onto lightweight embedded platforms. Five participants (three able-bodied and two living with upper-body disabilities) presenting different motion limitations (e.g. spasms, reduced motion range) were recruited. They were asked to perform up to 9 different motion classes, including head, shoulder, finger, and foot motions, with respect to their residual functional capacities. The measured prediction performances show an average accuracy of 99.96% for able-bodied individuals and 91.66% for participants with upper-body disabilities. The recorded dataset has also been made available online to the research community. Proof of concept for the real-time use of the system is given through an assembly task replicating activities of daily living using the JACO arm from Kinova Robotics.