 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Population-based Hybrid Approach to Hyperparameter Optimization for Neural Networks
Nov 27, 2020
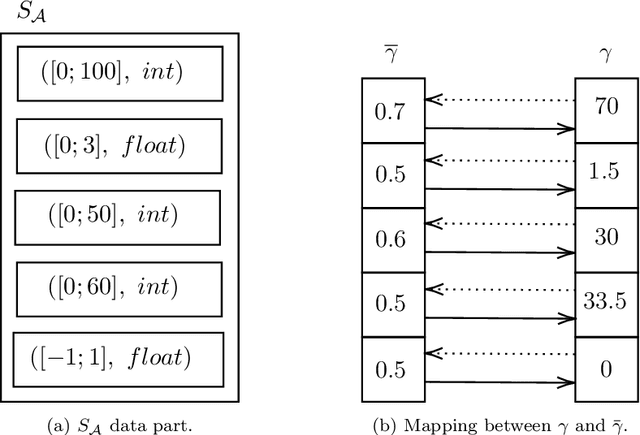
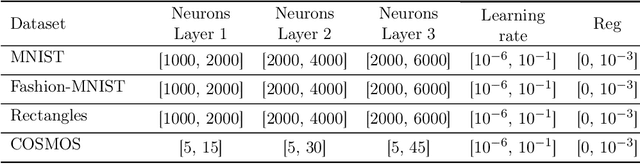
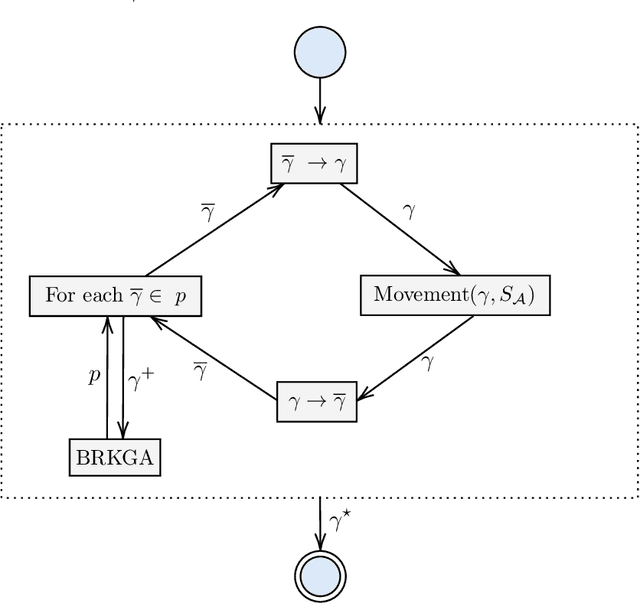
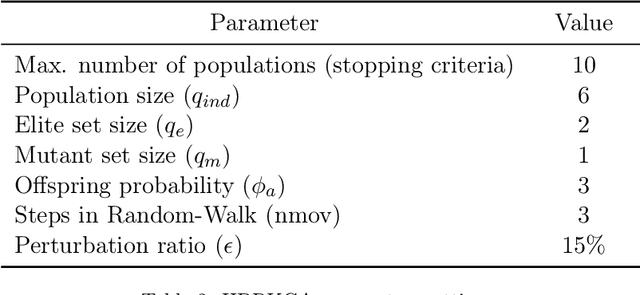
In recent years, large amounts of data have been generated, and computer power has kept growing. This scenario has led to a resurgence in the interest in artificial neural networks. One of the main challenges in training effective neural network models is finding the right combination of hyperparameters to be used. Indeed, the choice of an adequate approach to search the hyperparameter space directly influences the accuracy of the resulting neural network model. Common approaches for hyperparameter optimization are Grid Search, Random Search, and Bayesian Optimization. There are also population-based methods such as CMA-ES. In this paper, we present HBRKGA, a new population-based approach for hyperparameter optimization. HBRKGA is a hybrid approach that combines the Biased Random Key Genetic Algorithm with a Random Walk technique to search the hyperparameter space efficiently. Several computational experiments on eight different datasets were performed to assess the effectiveness of the proposed approach. Results showed that HBRKGA could find hyperparameter configurations that outperformed (in terms of predictive quality) the baseline methods in six out of eight datasets while showing a reasonable execution time.
Online Model Selection: a Rested Bandit Formulation
Dec 07, 2020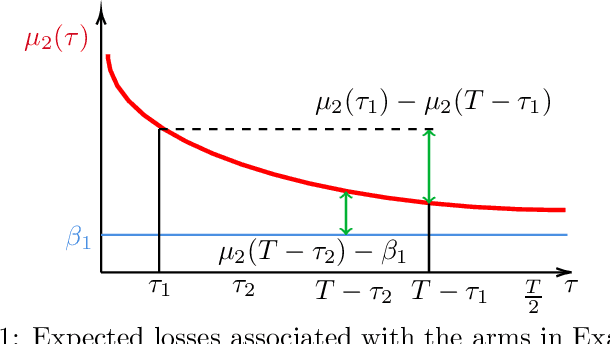
Motivated by a natural problem in online model selection with bandit information, we introduce and analyze a best arm identification problem in the rested bandit setting, wherein arm expected losses decrease with the number of times the arm has been played. The shape of the expected loss functions is similar across arms, and is assumed to be available up to unknown parameters that have to be learned on the fly. We define a novel notion of regret for this problem, where we compare to the policy that always plays the arm having the smallest expected loss at the end of the game. We analyze an arm elimination algorithm whose regret vanishes as the time horizon increases. The actual rate of convergence depends in a detailed way on the postulated functional form of the expected losses. Unlike known model selection efforts in the recent bandit literature, our algorithm exploits the specific structure of the problem to learn the unknown parameters of the expected loss function so as to identify the best arm as quickly as possible. We complement our analysis with a lower bound, indicating strengths and limitations of the proposed solution.
Maximizing Store Revenues using Tabu Search for Floor Space Optimization
Nov 04, 2020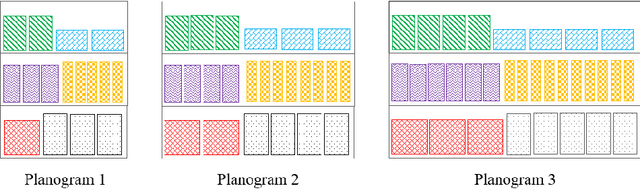
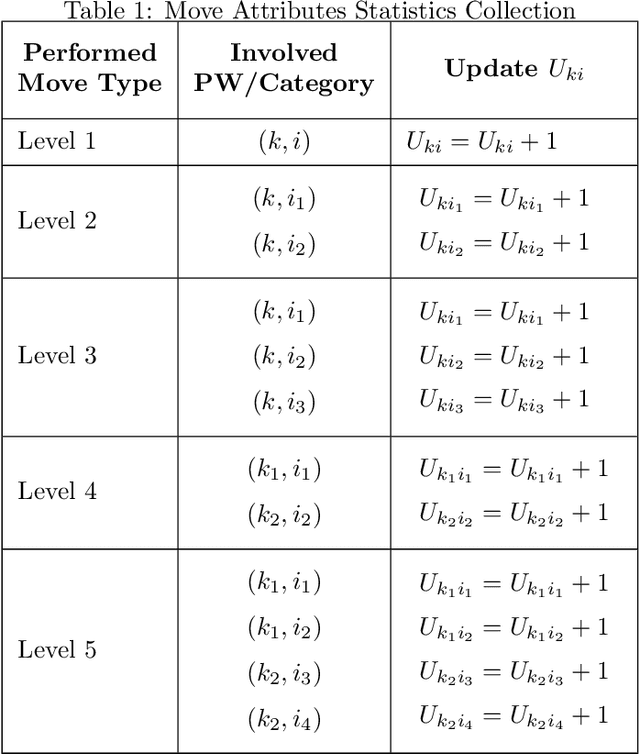
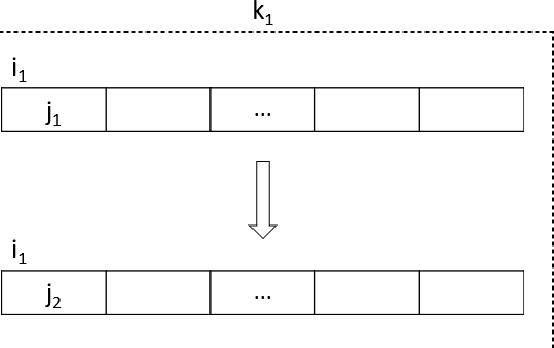
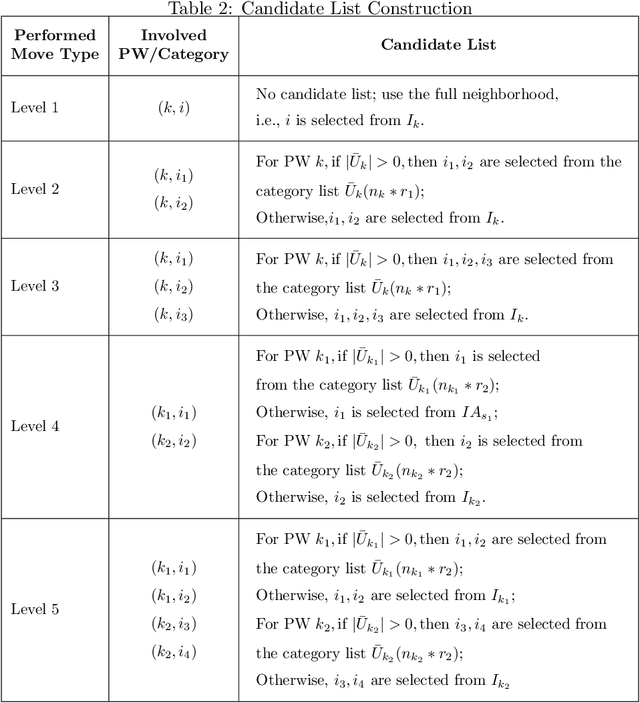
Floor space optimization is a critical revenue management problem commonly encountered by retailers. It maximizes store revenue by optimally allocating floor space to product categories which are assigned to their most appropriate planograms. We formulate the problem as a connected multi-choice knapsack problem with an additional global constraint and propose a tabu search based meta-heuristic that exploits the multiple special neighborhood structures. We also incorporate a mechanism to determine how to combine the multiple neighborhood moves. A candidate list strategy based on learning from prior search history is also employed to improve the search quality. The results of computational testing with a set of test problems show that our tabu search heuristic can solve all problems within a reasonable amount of time. Analyses of individual contributions of relevant components of the algorithm were conducted with computational experiments.
Federated Learning for Cellular-connected UAVs: Radio Mapping and Path Planning
Aug 23, 2020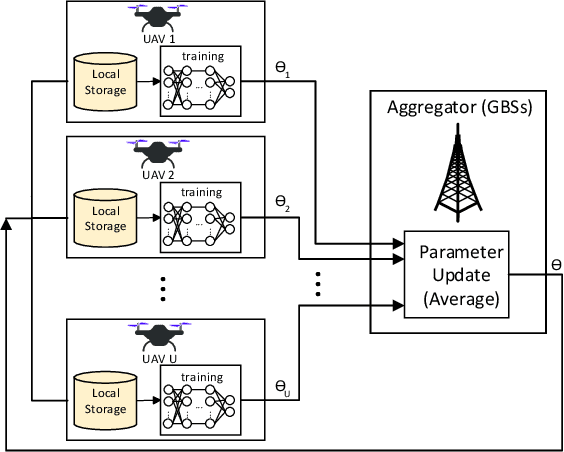
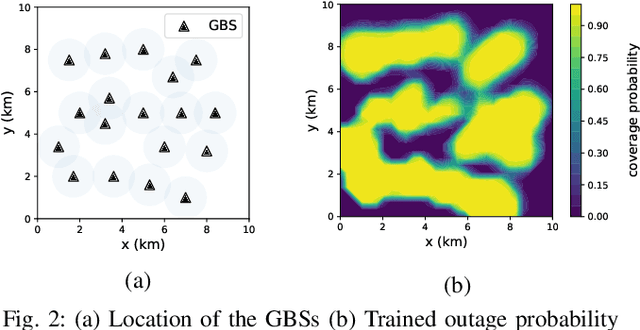
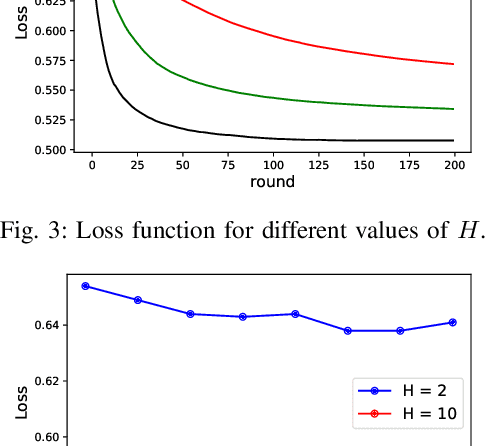
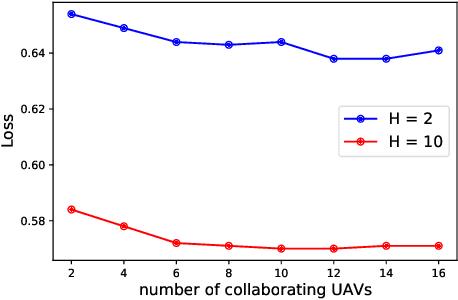
To prolong the lifetime of the unmanned aerial vehicles (UAVs), the UAVs need to fulfill their missions in the shortest possible time. In addition to this requirement, in many applications, the UAVs require a reliable internet connection during their flights. In this paper, we minimize the travel time of the UAVs, ensuring that a probabilistic connectivity constraint is satisfied. To solve this problem, we need a global model of the outage probability in the environment. Since the UAVs have different missions and fly over different areas, their collected data carry local information on the network's connectivity. As a result, the UAVs can not rely on their own experiences to build the global model. This issue affects the path planning of the UAVs. To address this concern, we utilize a two-step approach. In the first step, by using Federated Learning (FL), the UAVs collaboratively build a global model of the outage probability in the environment. In the second step, by using the global model obtained in the first step and rapidly-exploring random trees (RRTs), we propose an algorithm to optimize UAVs' paths. Simulation results show the effectiveness of this two-step approach for UAV networks.
Deep ConvLSTM with self-attention for human activity decoding using wearables
May 02, 2020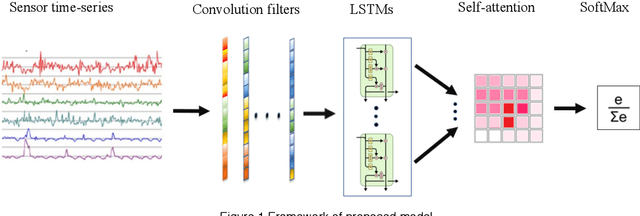
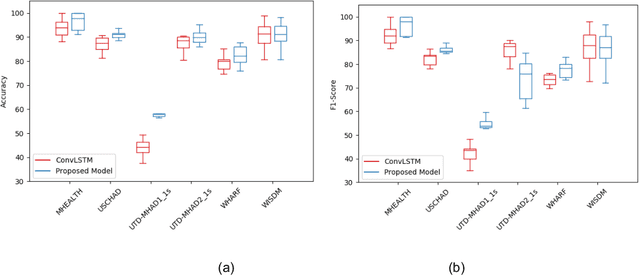

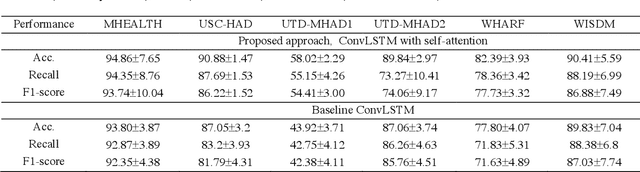
Decoding human activity accurately from wearable sensors can aid in applications related to healthcare and context awareness. The present approaches in this domain use recurrent and/or convolutional models to capture the spatio-temporal features from time series data from multiple sensors. We propose a deep neural network architecture that not only captures the spatio-temporal features of multiple sensor time series data, but also selects, learns important time points by utilizing a self-attention mechanism. We show the validity of the proposed approach across different data sampling strategies on six public datasets and demonstrate that the self-attention mechanism gave significant improvement in performance over deep networks using a combination of recurrent and convolution networks. We also show that the proposed approach gave a statistically significant performance enhancement over previous state-of-the-art methods for the tested datasets. The proposed methods open avenues for better decoding of human activity from multiple body sensors over extended periods of time. The code implementation for the proposed model is available at https://github.com/isukrit/encodingHumanActivity
FENet: A Frequency Extraction Network for Obstructive Sleep Apnea Detection
Jan 08, 2021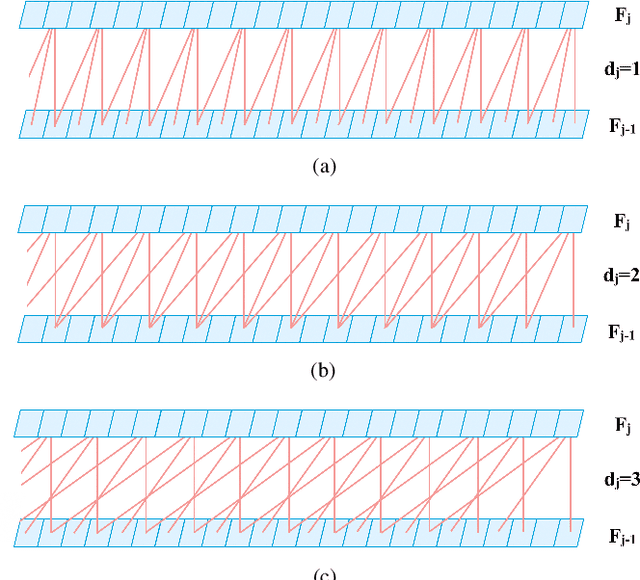
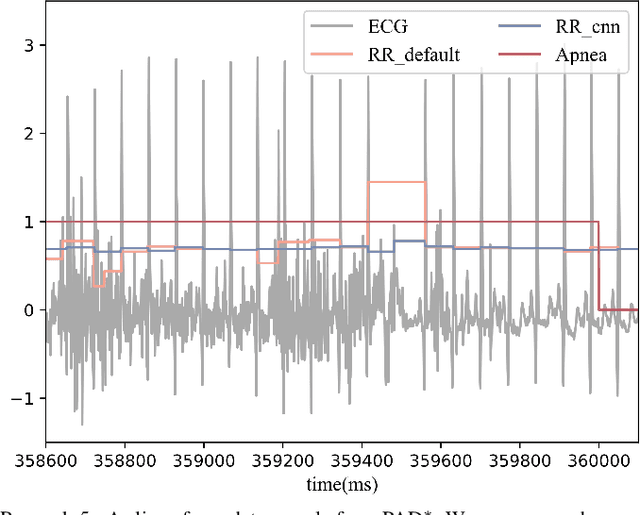
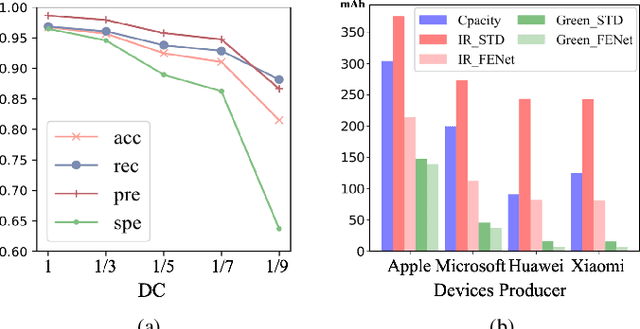
Obstructive Sleep Apnea (OSA) is a highly prevalent but inconspicuous disease that seriously jeopardizes the health of human beings. Polysomnography (PSG), the gold standard of detecting OSA, requires multiple specialized sensors for signal collection, hence patients have to physically visit hospitals and bear the costly treatment for a single detection. Recently, many single-sensor alternatives have been proposed to improve the cost efficiency and convenience. Among these methods, solutions based on RR-interval (i.e., the interval between two consecutive pulses) signals reach a satisfactory balance among comfort, portability and detection accuracy. In this paper, we advance RR-interval based OSA detection by considering its real-world practicality from energy perspectives. As photoplethysmogram (PPG) pulse sensors are commonly equipped on smart wrist-worn wearable devices (e.g., smart watches and wristbands), the energy efficiency of the detection model is crucial to fully support an overnight observation on patients. This creates challenges as the PPG sensors are unable to keep collecting continuous signals due to the limited battery capacity on smart wrist-worn devices. Therefore, we propose a novel Frequency Extraction Network (FENet), which can extract features from different frequency bands of the input RR-interval signals and generate continuous detection results with downsampled, discontinuous RR-interval signals. With the help of the one-to-multiple structure, FENet requires only one-third of the operation time of the PPG sensor, thus sharply cutting down the energy consumption and enabling overnight diagnosis. Experimental results on real OSA datasets reveal the state-of-the-art performance of FENet.
Night vision obstacle detection and avoidance based on Bio-Inspired Vision Sensors
Oct 29, 2020
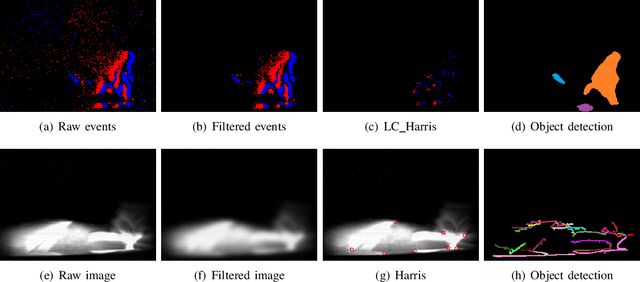
Moving towards autonomy, unmanned vehicles rely heavily on state-of-the-art collision avoidance systems (CAS). However, the detection of obstacles especially during night-time is still a challenging task since the lighting conditions are not sufficient for traditional cameras to function properly. Therefore, we exploit the powerful attributes of event-based cameras to perform obstacle detection in low lighting conditions. Event cameras trigger events asynchronously at high output temporal rate with high dynamic range of up to 120 $dB$. The algorithm filters background activity noise and extracts objects using robust Hough transform technique. The depth of each detected object is computed by triangulating 2D features extracted utilising LC-Harris. Finally, asynchronous adaptive collision avoidance (AACA) algorithm is applied for effective avoidance. Qualitative evaluation is compared using event-camera and traditional camera.
Optimizing Neural Networks via Koopman Operator Theory
Jun 11, 2020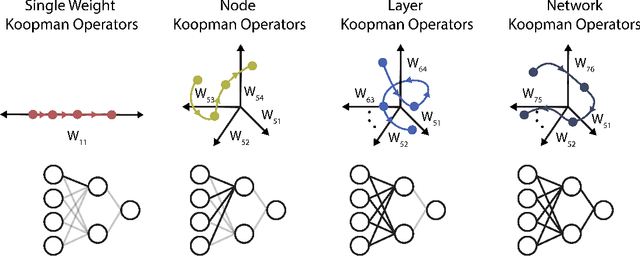
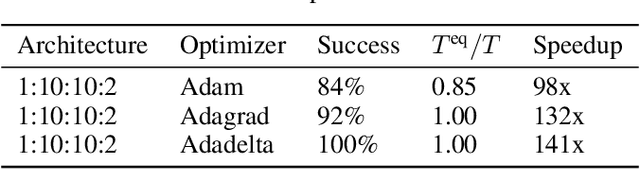
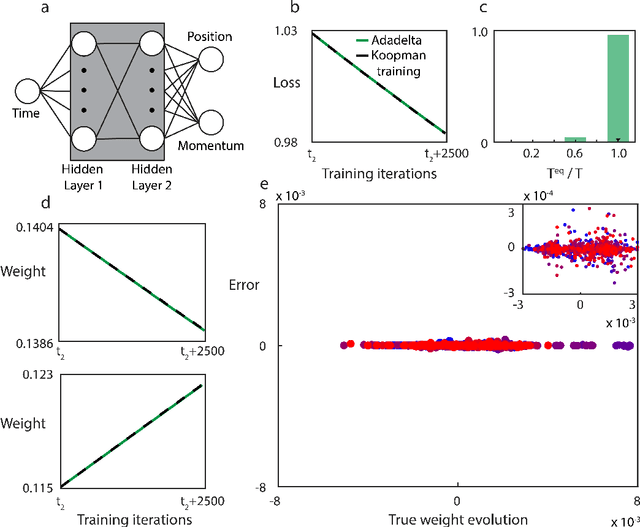

Koopman operator theory, a powerful framework for discovering the underlying dynamics of nonlinear dynamical systems, was recently shown to be intimately connected with neural network training. In this work, we take the first steps in making use of this connection. As Koopman operator theory is a linear theory, a successful implementation of it in evolving network weights and biases offers the promise of accelerated training, especially in the context of deep networks, where optimization is inherently a non-convex problem. We show that Koopman operator theory methods allow for accurate predictions of the weights and biases of a feedforward, fully connected deep network over a non-trivial range of training time. During this time window, we find that our approach is at least 10x faster than gradient descent based methods, in line with the results expected from our complexity analysis. We highlight additional methods by which our results can be expanded to broader classes of networks and larger time intervals, which shall be the focus of future work in this novel intersection between dynamical systems and neural network theory.
A Compact Gated-Synapse Model for Neuromorphic Circuits
Jun 29, 2020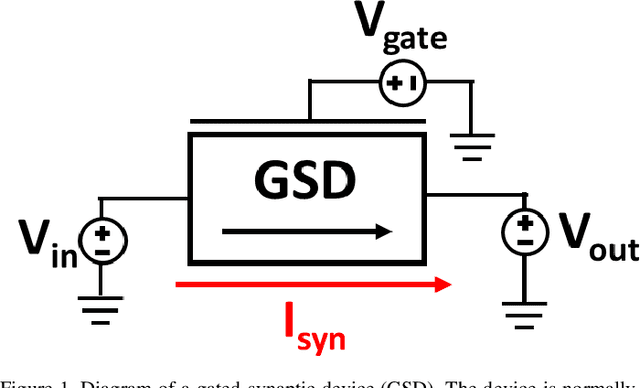
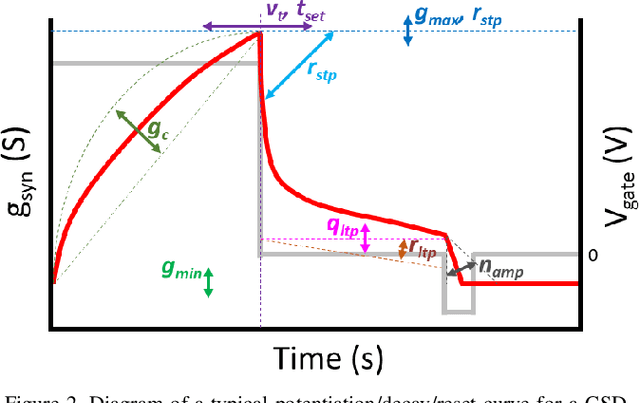
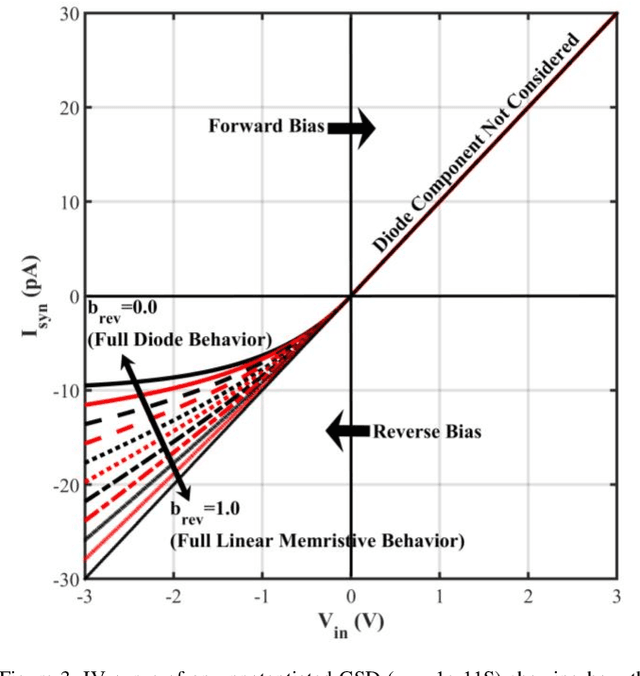
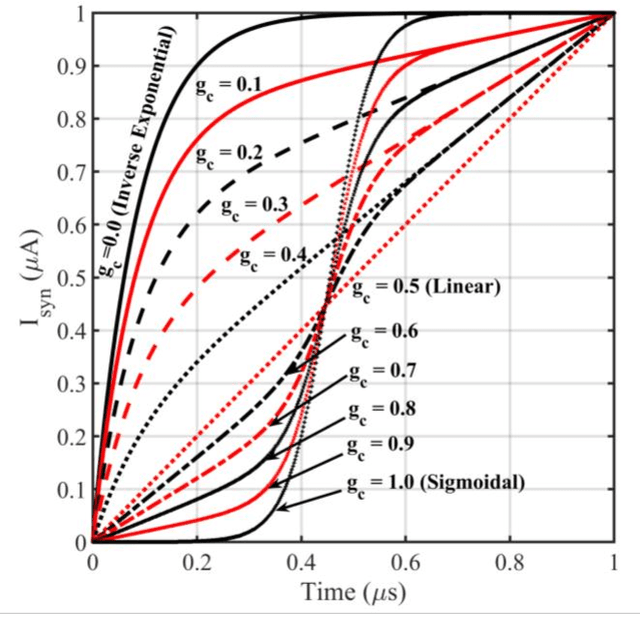
This work reports a compact behavioral model for gated-synaptic memory. The model is developed in Verilog-A for easy integration into computer-aided design of neuromorphic circuits using emerging memory. The model encompasses various forms of gated synapses within a single framework and is not restricted to only a single type. The behavioral theory of the model is described in detail along with a full list of the default parameter settings. The model includes parameters such as a device's ideal set time, threshold voltage, general evolution of the conductance with respect to time, decay of the device's state, etc. Finally, the model's validity is shown via extensive simulation and fitting to experimentally reported data on published gated-synapses.
VideoMix: Rethinking Data Augmentation for Video Classification
Dec 07, 2020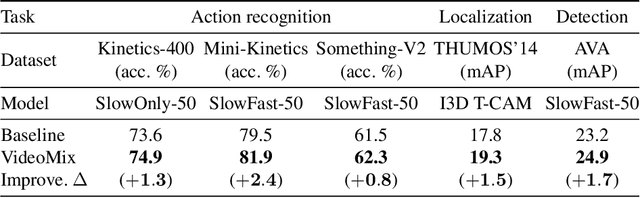
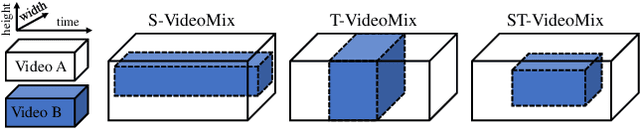
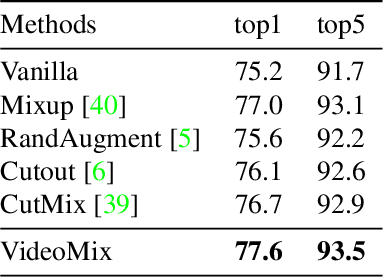
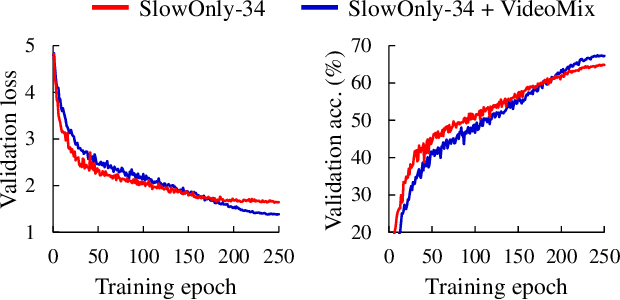
State-of-the-art video action classifiers often suffer from overfitting. They tend to be biased towards specific objects and scene cues, rather than the foreground action content, leading to sub-optimal generalization performances. Recent data augmentation strategies have been reported to address the overfitting problems in static image classifiers. Despite the effectiveness on the static image classifiers, data augmentation has rarely been studied for videos. For the first time in the field, we systematically analyze the efficacy of various data augmentation strategies on the video classification task. We then propose a powerful augmentation strategy VideoMix. VideoMix creates a new training video by inserting a video cuboid into another video. The ground truth labels are mixed proportionally to the number of voxels from each video. We show that VideoMix lets a model learn beyond the object and scene biases and extract more robust cues for action recognition. VideoMix consistently outperforms other augmentation baselines on Kinetics and the challenging Something-Something-V2 benchmarks. It also improves the weakly-supervised action localization performance on THUMOS'14. VideoMix pretrained models exhibit improved accuracies on the video detection task (AVA).