 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Cycloidal Trajectory Realization on Staircase with Optimal Trajectory Tracking Control based on Neural Network Temporal Quantized Lagrange Dynamics (NNTQLD)
Dec 02, 2020
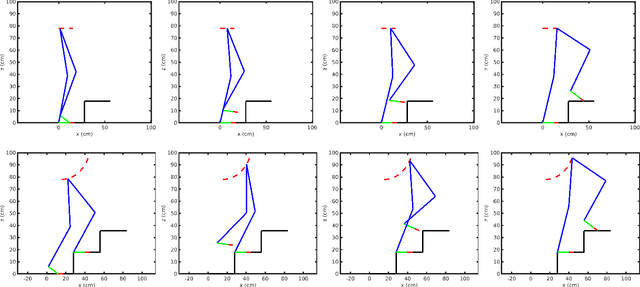
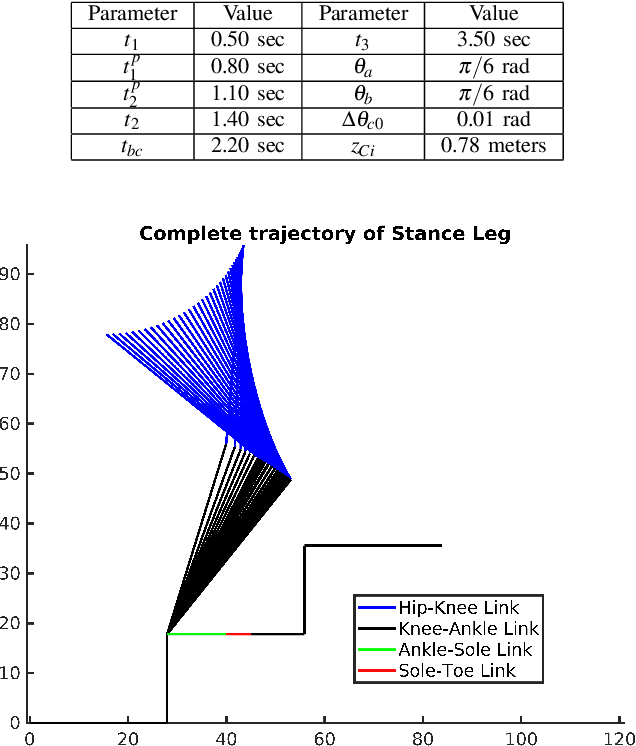
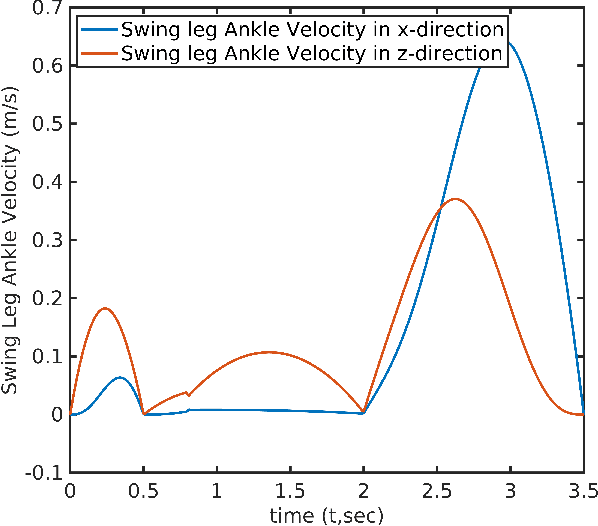
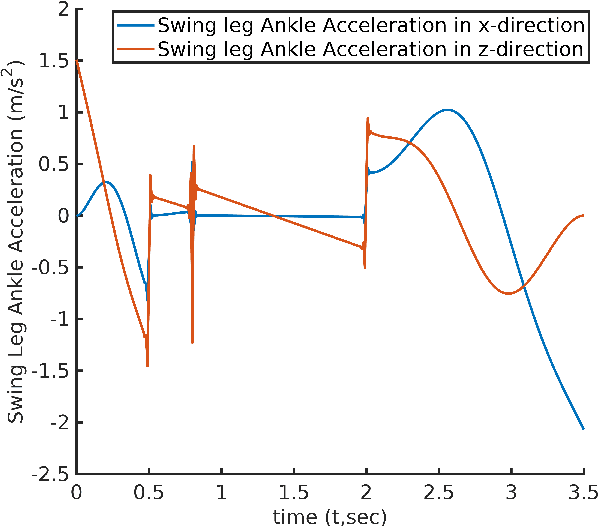
In this paper, a novel optimal technique for joint angles trajectory tracking control of a biped robot with toe foot is proposed. For the task of climbing stairs by a 9 link biped model, a cycloid trajectory for swing phase is proposed in such a way that the cycloid variables depend on the staircase dimensions. Zero Moment Point(ZMP) criteria is taken for satisfying stability constraint. This paper mainly can be divided into 4 steps: 1) Planning stable cycloid trajectory for initial step and subsequent step for climbing upstairs. 2) Inverse Kinematics using unsupervised artificial neural network with knot shifting procedure for jerk minimization. 3) Modeling Dynamics for Toe foot biped model using Lagrange Dynamics along with contact modeling using spring damper system , and finally 4) Real time joint angle trajectory tracking optimization using Temporal Quantized Lagrange Dynamics which takes inverse kinematics output from neural network as its inputs. Generated patterns have been simulated in MATLAB.
Social Network Analysis of Hadith Narrators from Sahih Bukhari
Feb 03, 2021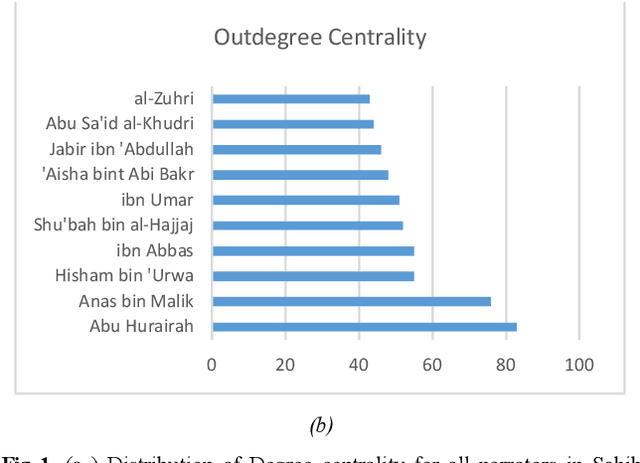
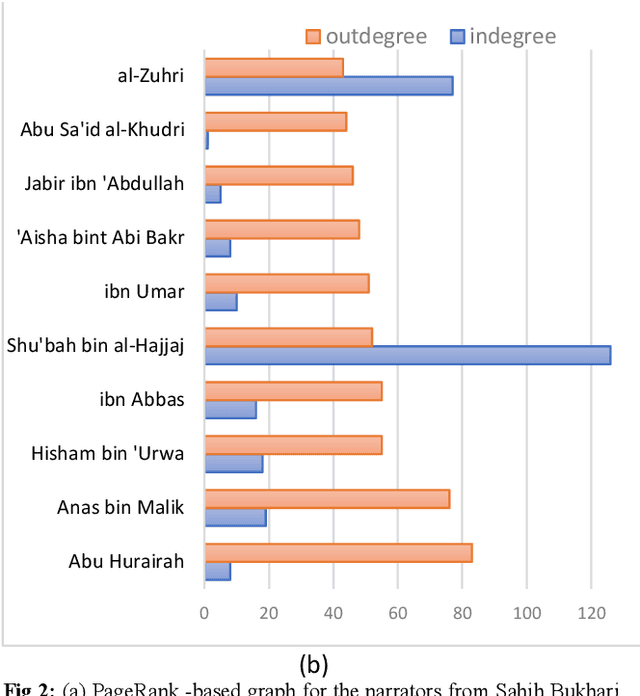
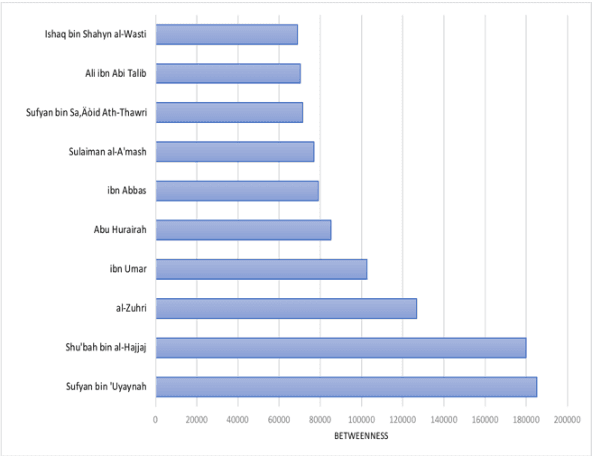
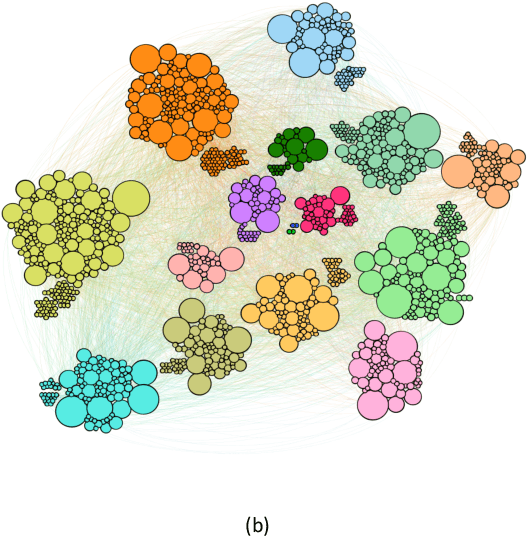
The ahadith, prophetic traditions for the Muslims around the world, are narrations originating from the sayings and the deeds of Prophet Muhammad (pbuh). They are considered one of the fundamental sources of Islamic legislation along with the Quran. The list of persons involved in the narration of each hadith is carefully scrutinized by scholars studying the hadith, with respect to their reputation and authenticity of the hadith. This is due to the its legislative importance in Islamic principles. There were many narrators who contributed to this responsibility of preserving prophetic narrations over the centuries. But to date, no systematic and comprehensive study, based on the social network, has been adapted to understand the contribution of early hadith narrators and the propagation of hadith across generations. In this study, we represented the chain of narrators of the hadith collection from Sahih Bukhari as a social graph. Based on social network analysis (SNA) on this graph, we found that the network of narrators is a scale-free network. We identified a list of influential narrators from the companions as well as the narrators from the second and third-generation who contribute significantly in the propagation of hadith collected in Sahih Bukhari. We discovered sixteen communities from the narrators of Sahih Bukhari. In each of these communities, there are other narrators who contributed significantly to the propagation of prophetic narrations. We also found that most narrators were centered in Makkah and Madinah in the era of companions and, then, gradually the center of hadith narrators shifted towards Kufa, Baghdad and central Asia over a period of time. To the best of our knowledge, this the first comprehensive and systematic study based on SNA, representing the narrators as a social graph to analyze their contribution to the preservation and propagation of hadith.
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors
Aug 20, 2020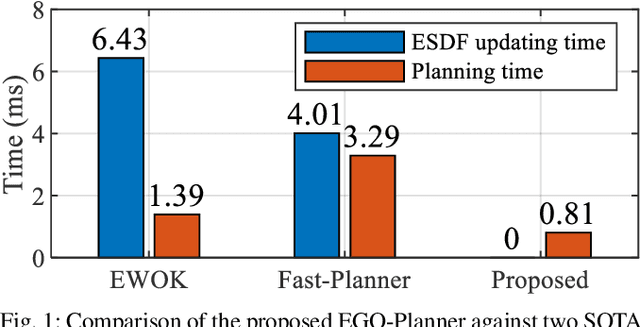
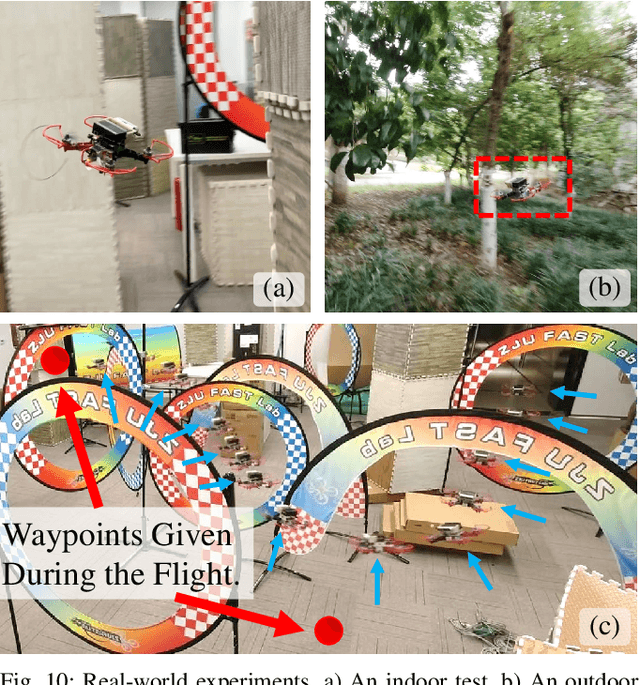
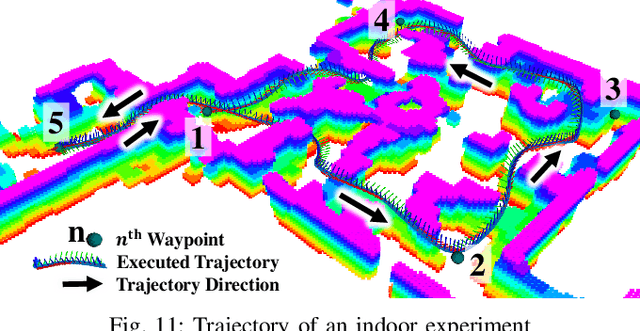
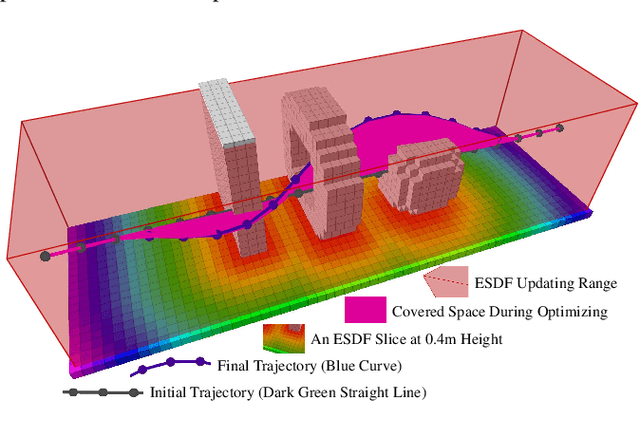
Gradient-based planners are widely used for quadrotor local planning, in which a Euclidean Signed Distance Field (ESDF) is crucial for evaluating gradient magnitude and direction. Nevertheless, computing such a field has much redundancy since the trajectory optimization procedure only covers a very limited subspace of the ESDF updating range. In this paper, an ESDF-free gradient-based planning framework is proposed, which significantly reduces computation time. The main improvement is that the collision term in penalty function is formulated by comparing the colliding trajectory with a collision-free guiding path. The resulting obstacle information will be stored only if the trajectory hits new obstacles, making the planner only extract necessary obstacle information. Then, we lengthen the time allocation if dynamical feasibility is violated. An anisotropic curve fitting algorithm is introduced to adjust higher order derivatives of the trajectory while maintaining the original shape. Benchmark comparisons and real-world experiments verify its robustness and high-performance. The source code is released as ros packages.
Positive-Congruent Training: Towards Regression-Free Model Updates
Nov 20, 2020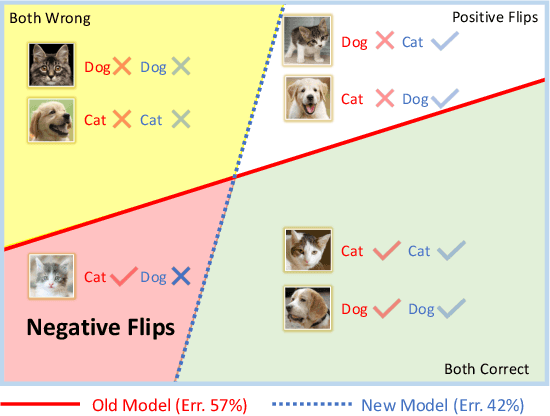

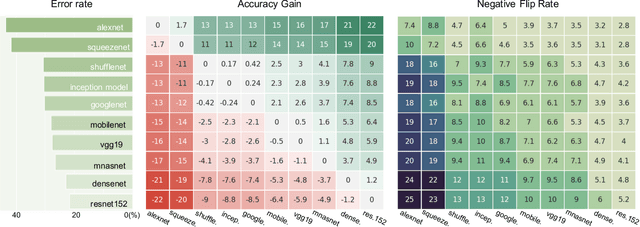
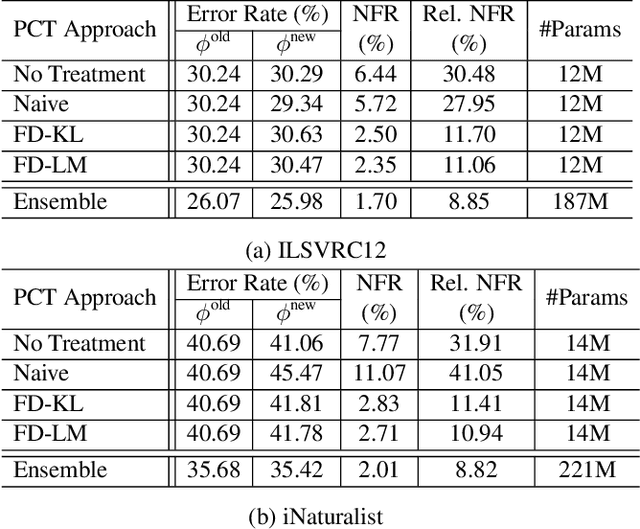
Reducing inconsistencies in the behavior of different versions of an AI system can be as important in practice as reducing its overall error. In image classification, sample-wise inconsistencies appear as "negative flips:" A new model incorrectly predicts the output for a test sample that was correctly classified by the old (reference) model. Positive-congruent (PC) training aims at reducing error rate while at the same time reducing negative flips, thus maximizing congruency with the reference model only on positive predictions, unlike model distillation. We propose a simple approach for PC training, Focal Distillation, which enforces congruence with the reference model by giving more weights to samples that were correctly classified. We also found that, if the reference model itself can be chosen as an ensemble of multiple deep neural networks, negative flips can be further reduced without affecting the new model's accuracy.
Curb Your Normality: On the Quality Requirements of Demand Prediction for Dynamic Public Transport
Aug 31, 2020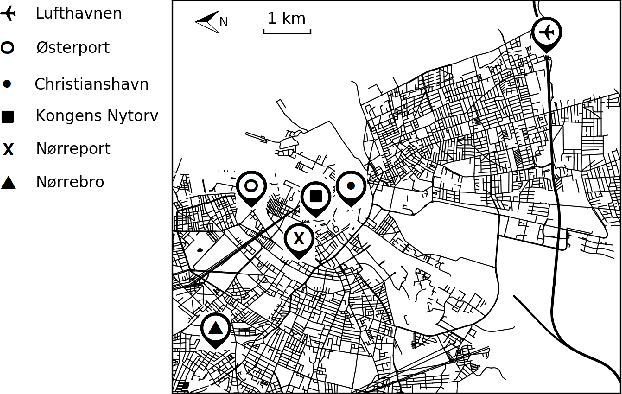
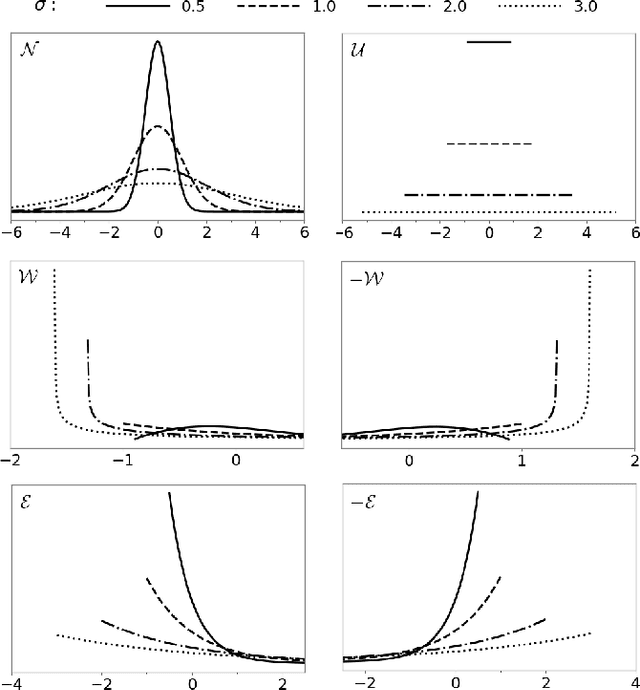
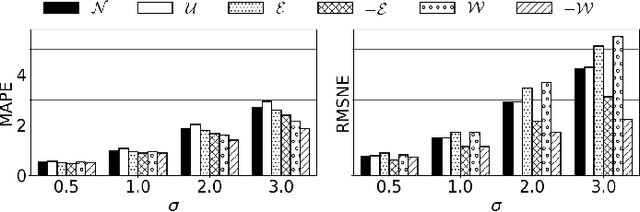
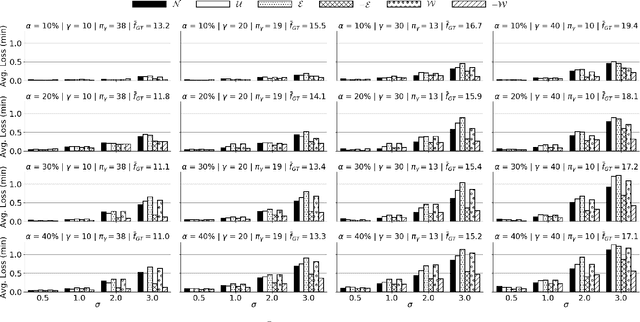
As Public Transport (PT) becomes more dynamic and demand-responsive, it increasingly depends on predictions of transport demand. But how accurate need such predictions be for effective PT operation? We address this question through an experimental case study of PT trips in Metropolitan Copenhagen, Denmark, which we conduct independently of any specific prediction models. First, we simulate errors in demand prediction through unbiased noise distributions that vary considerably in shape. Using the noisy predictions, we then simulate and optimize demand-responsive PT fleets via a commonly used linear programming formulation and measure their performance. Our results suggest that the optimized performance is mainly affected by the skew of the noise distribution and the presence of infrequently large prediction errors. In particular, the optimized performance can improve under non-Gaussian vs. Gaussian noise. We also obtain that dynamic routing can reduce trip time by at least 23% vs. static routing. This reduction is estimated at 809,000 EUR per year in terms of Value of Travel Time Savings for the case study.
Improving Classification through Weak Supervision in Context-specific Conversational Agent Development for Teacher Education
Oct 23, 2020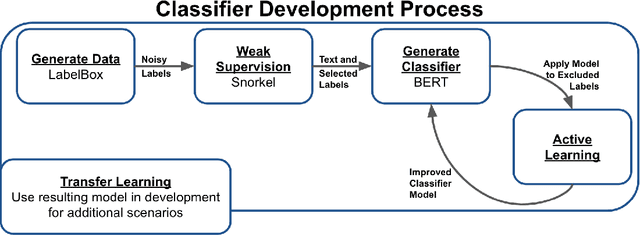

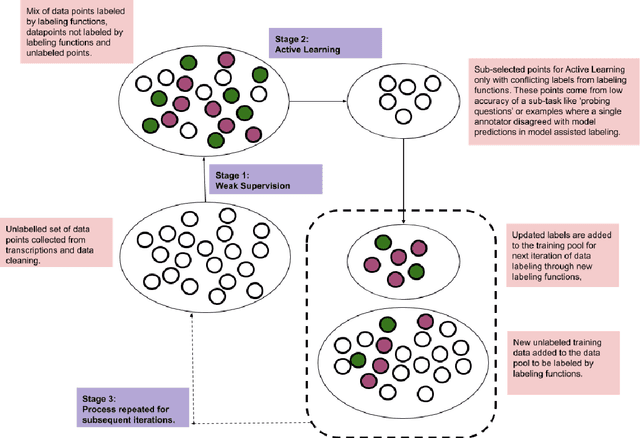
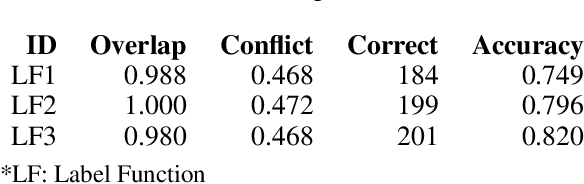
Machine learning techniques applied to the Natural Language Processing (NLP) component of conversational agent development show promising results for improved accuracy and quality of feedback that a conversational agent can provide. The effort required to develop an educational scenario specific conversational agent is time consuming as it requires domain experts to label and annotate noisy data sources such as classroom videos. Previous approaches to modeling annotations have relied on labeling thousands of examples and calculating inter-annotator agreement and majority votes in order to model the necessary scenarios. This method, while proven successful, ignores individual annotator strengths in labeling a data point and under-utilizes examples that do not have a majority vote for labeling. We propose using a multi-task weak supervision method combined with active learning to address these concerns. This approach requires less labeling than traditional methods and shows significant improvements in precision, efficiency, and time-requirements than the majority vote method (Ratner 2019). We demonstrate the validity of this method on the Google Jigsaw data set and then propose a scenario to apply this method using the Instructional Quality Assessment(IQA) to define the categories for labeling. We propose using probabilistic modeling of annotator labeling to generate active learning examples to further label the data. Active learning is able to iteratively improve the training performance and accuracy of the original classification model. This approach combines state-of-the art labeling techniques of weak supervision and active learning to optimize results in the educational domain and could be further used to lessen the data requirements for expanded scenarios within the education domain through transfer learning.
Primal-dual Learning for the Model-free Risk-constrained Linear Quadratic Regulator
Dec 02, 2020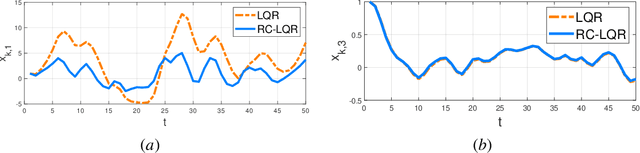
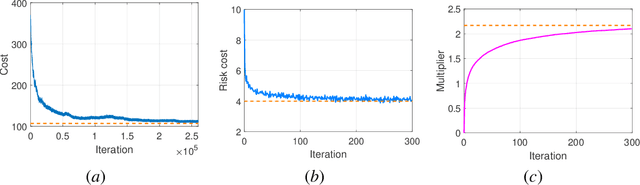
Risk-aware control, though with promise to tackle unexpected events, requires a known exact dynamical model. In this work, we propose a model-free framework to learn a risk-aware controller with a focus on the linear system. We formulate it as a discrete-time infinite-horizon LQR problem with a state predictive variance constraint. To solve it, we parameterize the policy with a feedback gain pair and leverage primal-dual methods to optimize it by solely using data. We first study the optimization landscape of the Lagrangian function and establish the strong duality in spite of its non-convex nature. Alongside, we find that the Lagrangian function enjoys an important local gradient dominance property, which is then exploited to develop a convergent random search algorithm to learn the dual function. Furthermore, we propose a primal-dual algorithm with global convergence to learn the optimal policy-multiplier pair. Finally, we validate our results via simulations.
Real-time 3D scene description using Spheres, Cones and Cylinders
Mar 12, 2016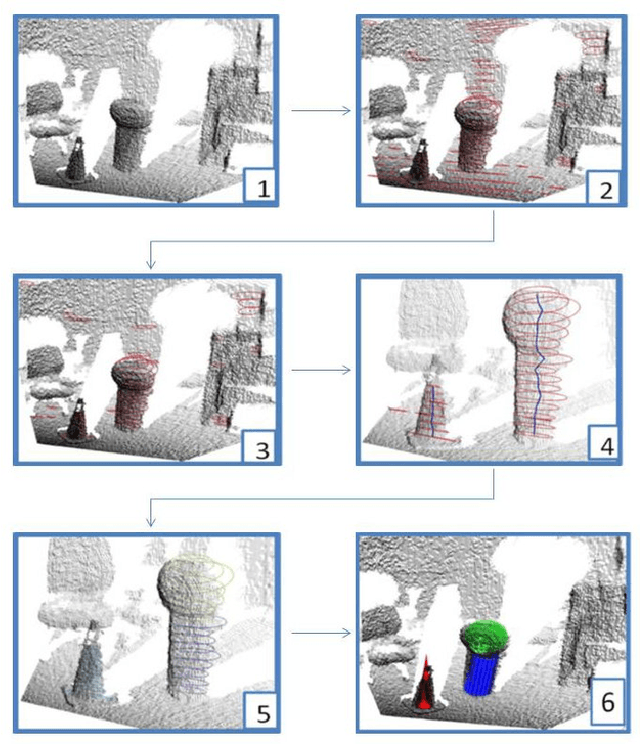
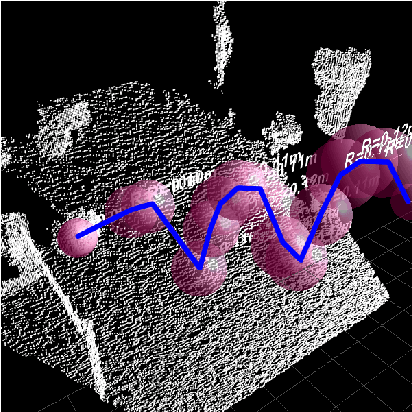
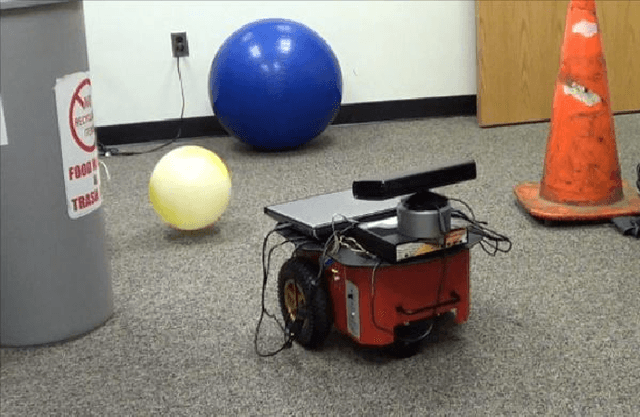
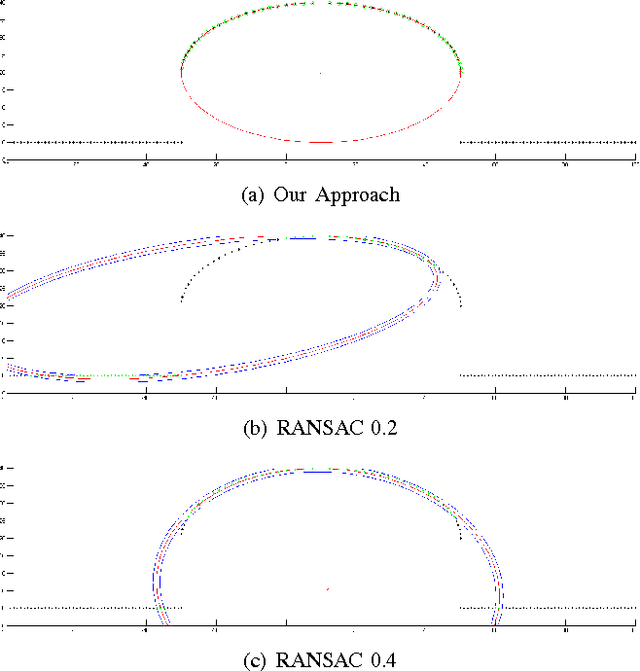
The paper describes a novel real-time algorithm for finding 3D geometric primitives (cylinders, cones and spheres) from 3D range data. In its core, it performs a fast model fitting with a model update in constant time (O(1)) for each new data point added to the model. We use a three stage approach.The first step inspects 1.5D sub spaces, to find ellipses. The next stage uses these ellipses as input by examining their neighborhood structure to form sets of candidates for the 3D geometric primitives. Finally, candidate ellipses are fitted to the geometric primitives. The complexity for point processing is O(n); additional time of lower order is needed for working on significantly smaller amount of mid-level objects. This allows the approach to process 30 frames per second on Kinect depth data, which suggests this approach as a pre-processing step for 3D real-time higher level tasks in robotics, like tracking or feature based mapping.
Simultaneous Greedys: A Swiss Army Knife for Constrained Submodular Maximization
Sep 29, 2020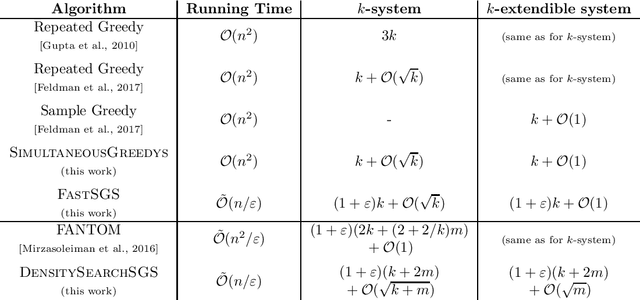
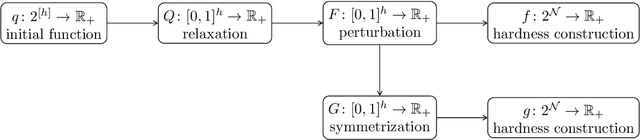
In this paper, we present SimultaneousGreedys, a deterministic algorithm for constrained submodular maximization. At a high level, the algorithm maintains $\ell$ solutions and greedily updates them in a simultaneous fashion, rather than a sequential one. SimultaneousGreedys achieves the tightest known approximation guarantees for both $k$-extendible systems and the more general $k$-systems, which are $(k+1)^2/k = k + \mathcal{O}(1)$ and $(1 + \sqrt{k+2})^2 = k + \mathcal{O}(\sqrt{k})$, respectively. This is in contrast to previous algorithms, which are designed to provide tight approximation guarantees in one setting, but not both. Furthermore, these approximation guarantees further improve to $k+1$ when the objective is monotone. We demonstrate that the algorithm may be modified to run in nearly linear time with an arbitrarily small loss in the approximation. This leads to the first nearly linear time algorithm for submodular maximization over $k$-extendible systems and $k$-systems. Finally, the technique is flexible enough to incorporate the intersection of $m$ additional knapsack constraints, while retaining similar approximation guarantees, which are roughly $k + 2m + \mathcal{O}(\sqrt{k+m})$ for $k$-systems and $k+2m + \mathcal{O}(\sqrt{m})$ for $k$-extendible systems. To complement our algorithmic contributions, we provide a hardness result which states that no algorithm making polynomially many queries to the value and independence oracles can achieve an approximation better than $k + 1/2 + \varepsilon$.
Integration of IRS in Indoor VLC Systems: Challenges, Potential and Promising Solutions
Jan 15, 2021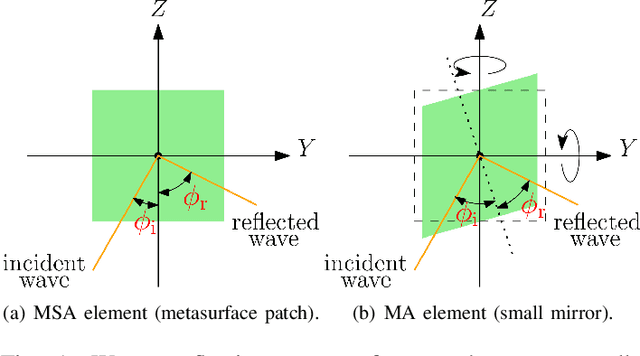
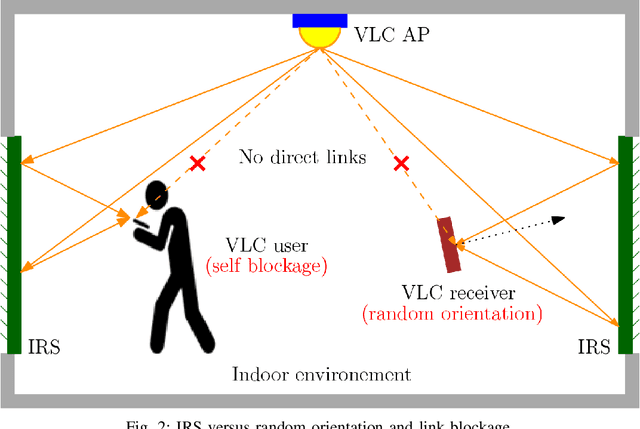
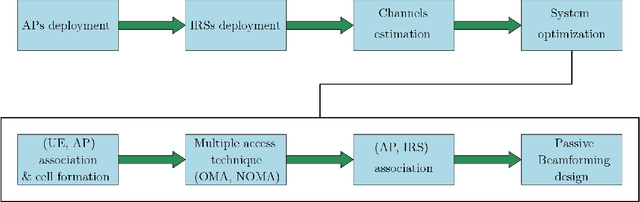
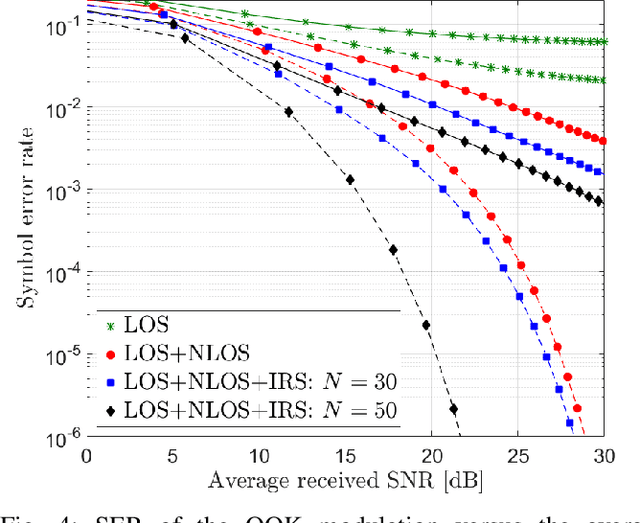
Visible light communication (VLC) is an optical wireless communication technology that is considered a promising solution for high-speed indoor connectivity. Unlike the case in conventional radio-frequency wireless systems, the VLC channel is not isotropic, meaning that the device orientation affects the channel gain significantly. In addition, due to the use of optical frequency bands, the presence of different obstacles (e.g., walls, human bodies, furniture) may easily block the VLC links. One solution to overcome these issues is the integration of the intelligent reflective surface (IRS), which is a new and revolutionizing technology that has the potential to significantly improve the performance of wireless networks. IRS is capable of smartly reconfiguring the wireless propagation environment with the use of massive low-cost passive reflecting elements integrated on a planar surface. In this paper, a framework for integrating IRS in indoor VLC systems is presented. We give an overview of IRS, including its advantages, different types and main applications in VLC systems, where we demonstrate the potential of IRS in overcoming the effects of random device orientation and links blockages. We discuss key factors pertaining to the design and integration of IRS in VLC systems, namely, the deployment of IRSs, the channel state information acquisition, the optimization of IRS configuration and the real-time IRS control. We also lay out a number of promising research directions that center around the integration of IRS in indoor VLC systems.