 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Balanced dynamic multiple travelling salesmen: algorithms and continuous approximations
Aug 27, 2020
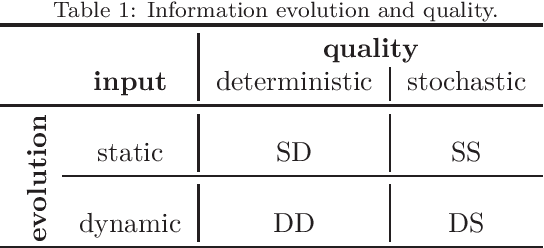
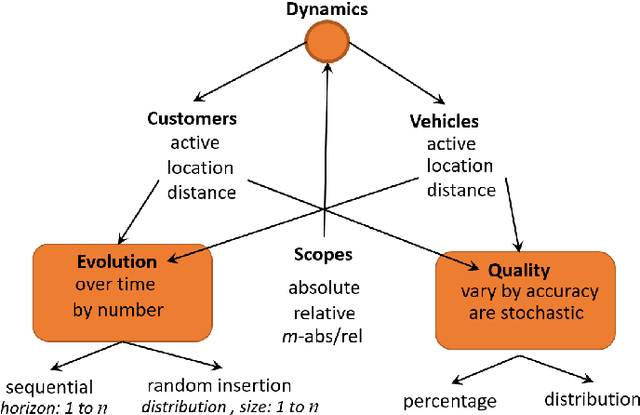
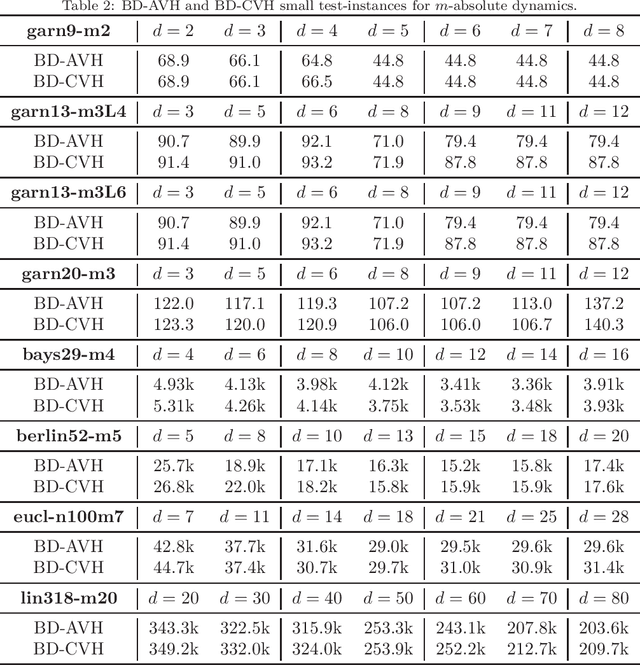
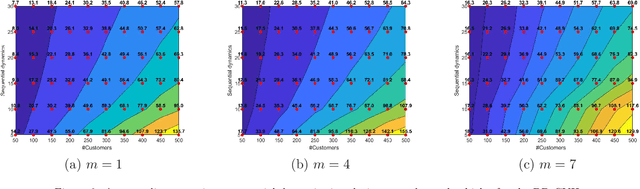
Dynamic routing occurs when customers are not known in advance, e.g. for real-time routing. Two heuristics are proposed that solve the balanced dynamic multiple travelling salesmen problem (BD-mTSP). These heuristics represent operational (tactical) tools for dynamic (online, real-time) routing. Several types and scopes of dynamics are proposed. Particular attention is given to sequential dynamics. The balanced dynamic closest vehicle heuristic (BD-CVH) and the balanced dynamic assignment vehicle heuristic (BD-AVH) are applied to this type of dynamics. The algorithms are tested for instances in the Euclidean plane. Continuous approximation models for the BD-mTSP's are derived and serve as strategic tools for dynamic routing. The models express route lengths using vehicles, customers and dynamic scopes without the need of running an algorithm. A machine learning approach was used to obtain regression models. The mean-average-percentage error of two of these models is below 3%.
Machine learning prediction of critical transition and system collapse
Dec 02, 2020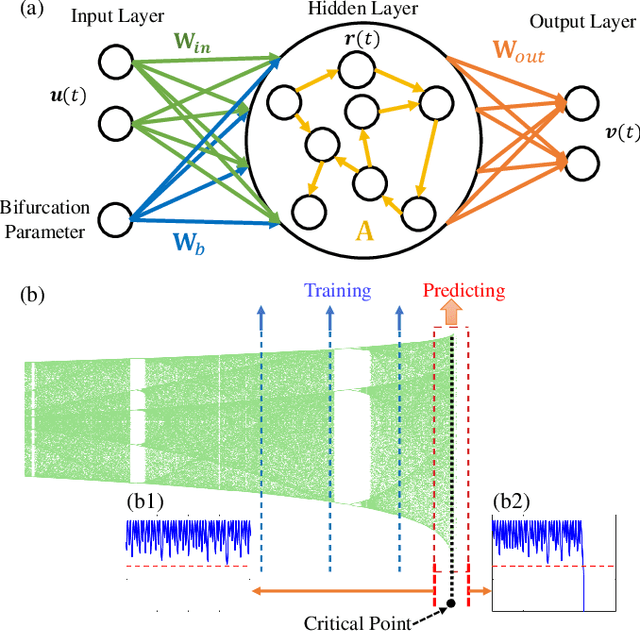
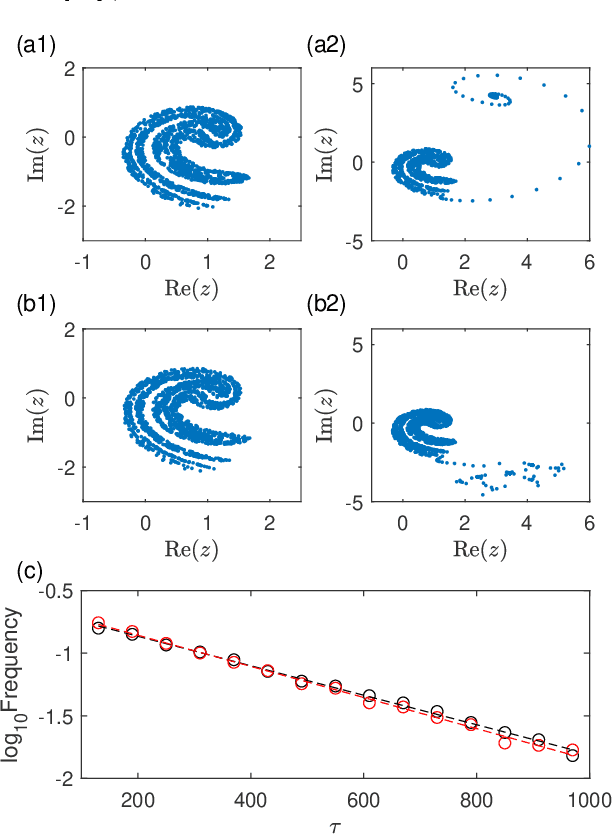
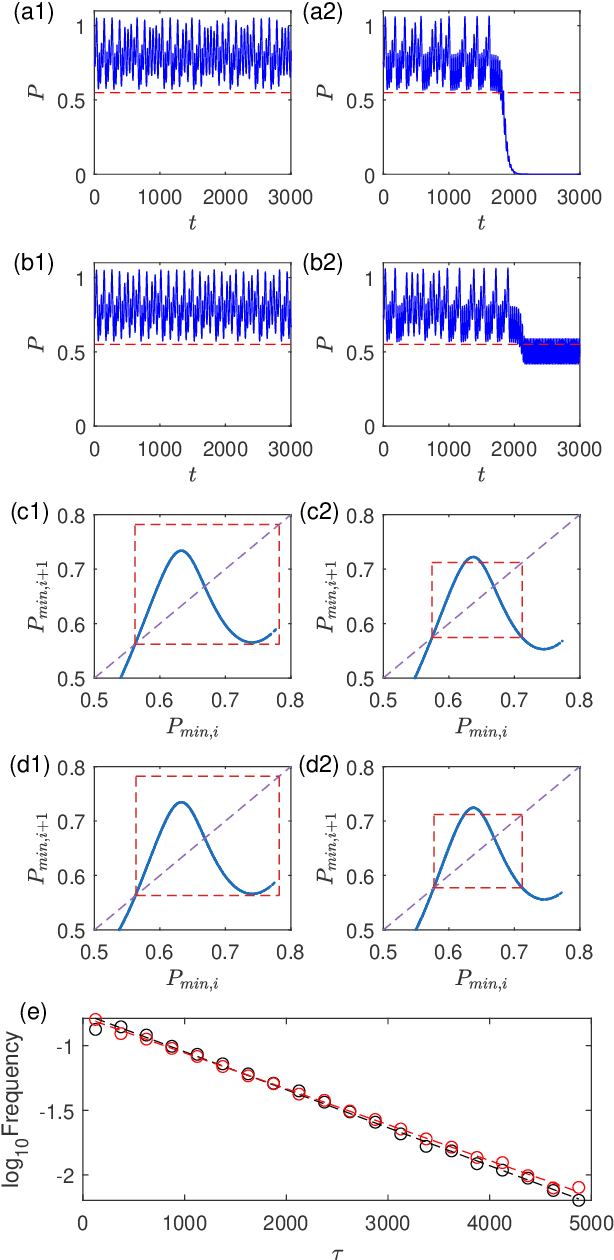
To predict a critical transition due to parameter drift without relying on model is an outstanding problem in nonlinear dynamics and applied fields. A closely related problem is to predict whether the system is already in or if the system will be in a transient state preceding its collapse. We develop a model free, machine learning based solution to both problems by exploiting reservoir computing to incorporate a parameter input channel. We demonstrate that, when the machine is trained in the normal functioning regime with a chaotic attractor (i.e., before the critical transition), the transition point can be predicted accurately. Remarkably, for a parameter drift through the critical point, the machine with the input parameter channel is able to predict not only that the system will be in a transient state, but also the average transient time before the final collapse.
Hierarchical Planning for Long-Horizon Manipulation with Geometric and Symbolic Scene Graphs
Dec 14, 2020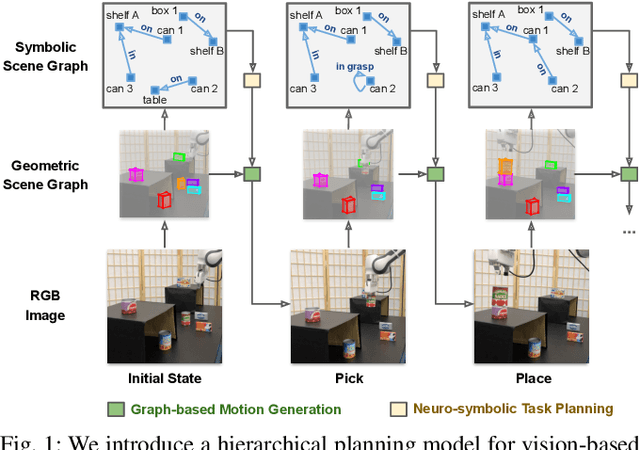
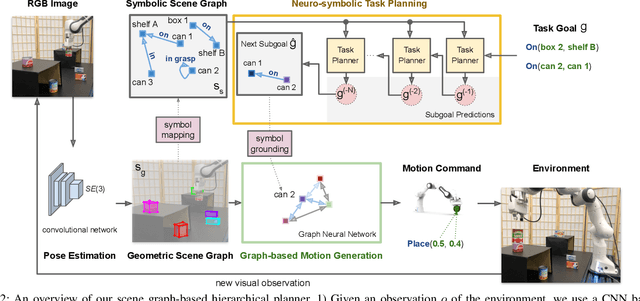
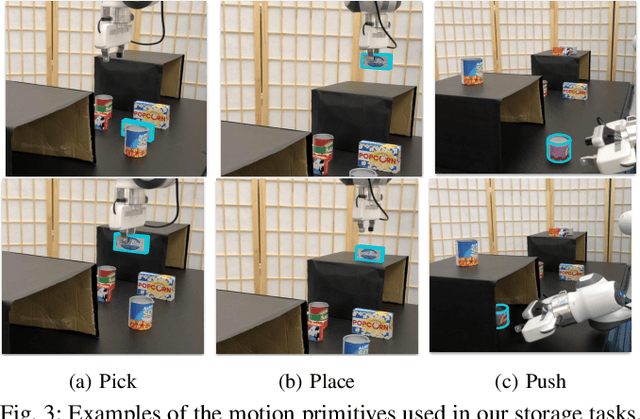
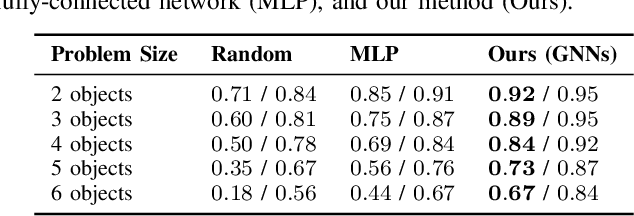
We present a visually grounded hierarchical planning algorithm for long-horizon manipulation tasks. Our algorithm offers a joint framework of neuro-symbolic task planning and low-level motion generation conditioned on the specified goal. At the core of our approach is a two-level scene graph representation, namely geometric scene graph and symbolic scene graph. This hierarchical representation serves as a structured, object-centric abstraction of manipulation scenes. Our model uses graph neural networks to process these scene graphs for predicting high-level task plans and low-level motions. We demonstrate that our method scales to long-horizon tasks and generalizes well to novel task goals. We validate our method in a kitchen storage task in both physical simulation and the real world. Our experiments show that our method achieved over 70% success rate and nearly 90% of subgoal completion rate on the real robot while being four orders of magnitude faster in computation time compared to standard search-based task-and-motion planner.
Incandescent Bulb and LED Brake Lights:Novel Analysis of Reaction Times
Oct 20, 2020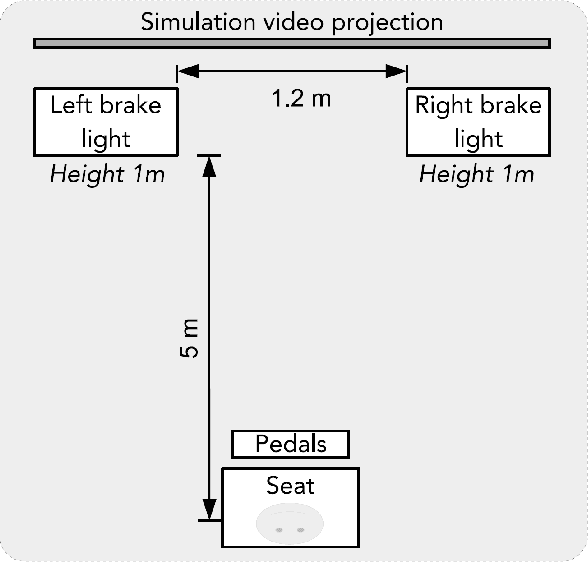
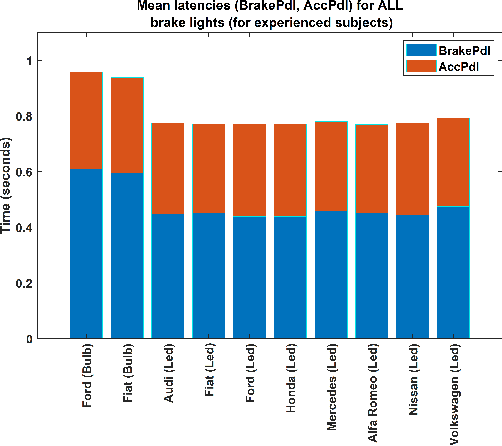
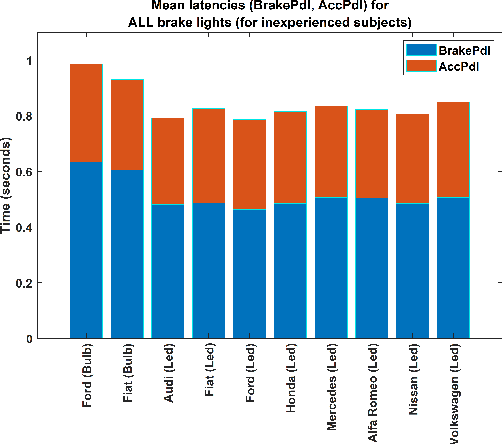
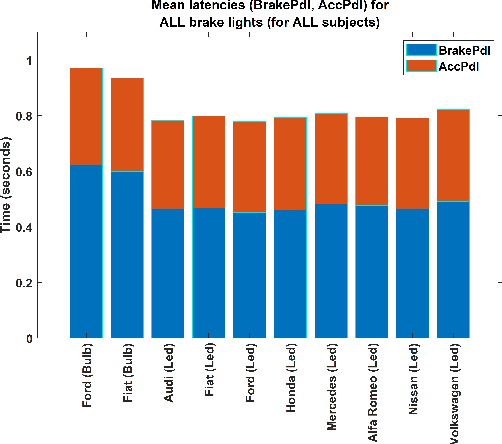
Rear-end collision accounts for around 8% of all vehicle crashes in the UK, with the failure to notice or react to a brake light signal being a major contributory cause. Meanwhile traditional incandescent brake light bulbs on vehicles are increasingly being replaced by a profusion of designs featuring LEDs. In this paper, we investigate the efficacy of brake light design using a novel approach to recording subject reaction times in a simulation setting using physical brake light assemblies. The reaction times of 22 subjects were measured for ten pairs of LED and incandescent bulb brake lights. Three events were investigated for each subject, namely the latency of brake light activation to accelerator release (BrakeAcc), the latency of accelerator release to brake pedal depression (AccPdl), and the cumulative time from light activation to brake pedal depression (BrakePdl). To our knowledge, this is the first study in which reaction times have been split into BrakeAcc and AccPdl. Results indicate that the two brake lights containing incandescent bulbs led to significantly slower reaction times compared to the tested eight LED lights. BrakeAcc results also show that experienced subjects were quicker to respond to the activation of brake lights by releasing the accelerator pedal. Interestingly, the analysis also revealed that the type of brake light influenced the AccPdl time, although experienced subjects did not always act quicker than inexperienced subjects. Overall, the study found that different designs of brake light can significantly influence driver response times.
Improving Model Accuracy for Imbalanced Image Classification Tasks by Adding a Final Batch Normalization Layer: An Empirical Study
Nov 12, 2020
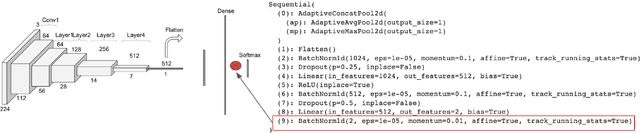
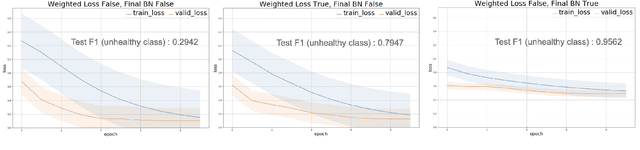
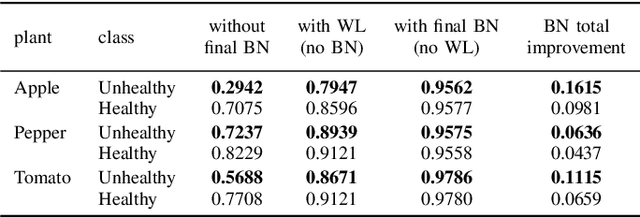
Some real-world domains, such as Agriculture and Healthcare, comprise early-stage disease indications whose recording constitutes a rare event, and yet, whose precise detection at that stage is critical. In this type of highly imbalanced classification problems, which encompass complex features, deep learning (DL) is much needed because of its strong detection capabilities. At the same time, DL is observed in practice to favor majority over minority classes and consequently suffer from inaccurate detection of the targeted early-stage indications. To simulate such scenarios, we artificially generate skewness (99% vs. 1%) for certain plant types out of the PlantVillage dataset as a basis for classification of scarce visual cues through transfer learning. By randomly and unevenly picking healthy and unhealthy samples from certain plant types to form a training set, we consider a base experiment as fine-tuning ResNet34 and VGG19 architectures and then testing the model performance on a balanced dataset of healthy and unhealthy images. We empirically observe that the initial F1 test score jumps from 0.29 to 0.95 for the minority class upon adding a final Batch Normalization (BN) layer just before the output layer in VGG19. We demonstrate that utilizing an additional BN layer before the output layer in modern CNN architectures has a considerable impact in terms of minimizing the training time and testing error for minority classes in highly imbalanced data sets. Moreover, when the final BN is employed, minimizing the loss function may not be the best way to assure a high F1 test score for minority classes in such problems. That is, the network might perform better even if it is not confident enough while making a prediction; leading to another discussion about why softmax output is not a good uncertainty measure for DL models.
Free annotated data for deep learning in microscopy? A hitchhiker's guide
Oct 08, 2020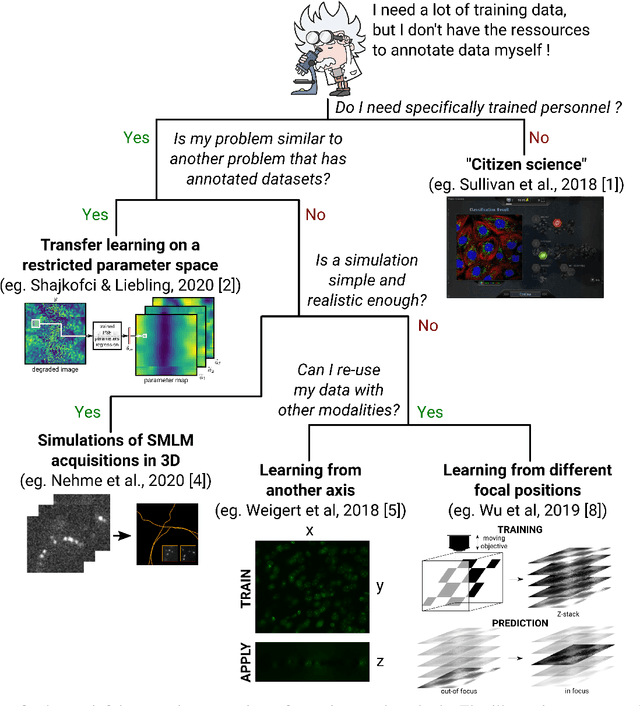
In microscopy, the time burden and cost of acquiring and annotating large datasets that many deep learning models take as a prerequisite, often appears to make these methods impractical. Can this requirement for annotated data be relaxed? Is it possible to borrow the knowledge gathered from datasets in other application fields and leverage it for microscopy? Here, we aim to provide an overview of methods that have recently emerged to successfully train learning-based methods in bio-microscopy.
A Hysteretic Q-learning Coordination Framework for Emerging Mobility Systems in Smart Cities
Nov 05, 2020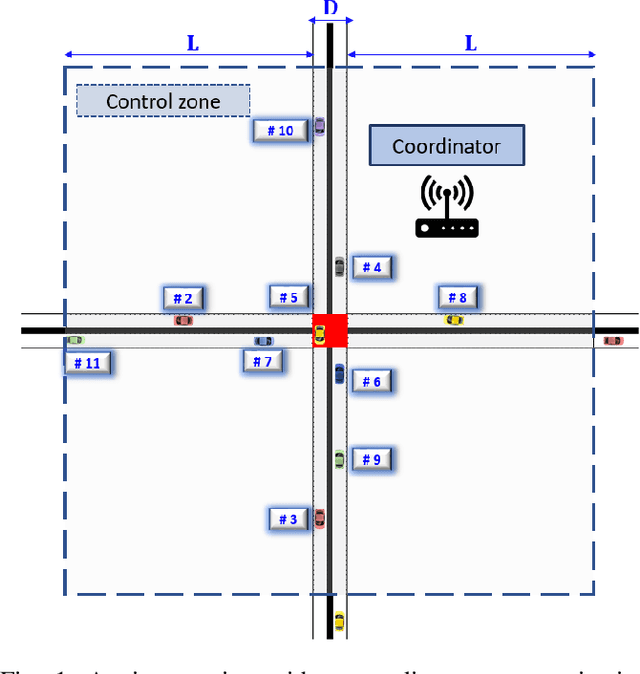
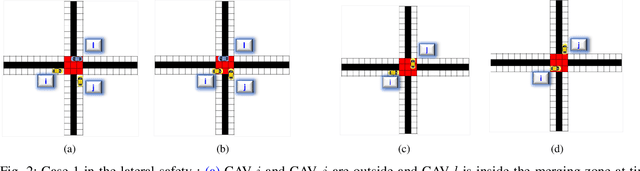
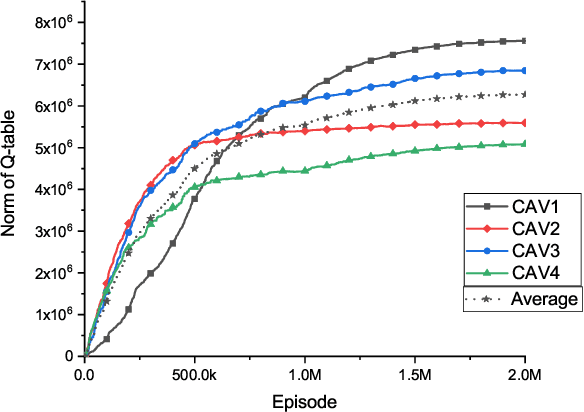
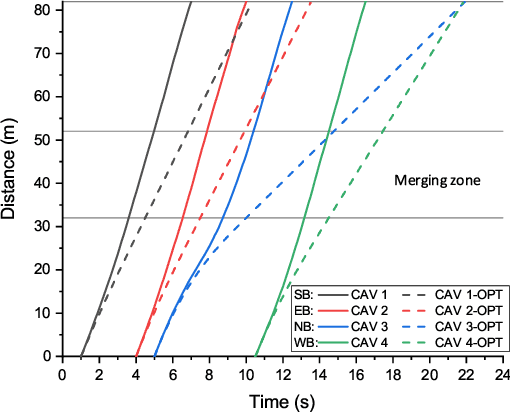
Connected and automated vehicles (CAVs) can alleviate traffic congestion, air pollution, and improve safety. In this paper, we provide a decentralized coordination framework for CAVs at a signal-free intersection to minimize travel time and improve fuel efficiency. We employ a simple yet powerful reinforcement learning approach, an off-policy temporal difference learning called Q-learning, enhanced with a coordination mechanism to address this problem. Then, we integrate a first-in-first-out queuing policy to improve the performance of our system. We demonstrate the efficacy of our proposed approach through simulation and comparison with the classical optimal control method based on Pontryagin's minimum principle.
The Road Towards 6G: A Comprehensive Survey
Feb 02, 2021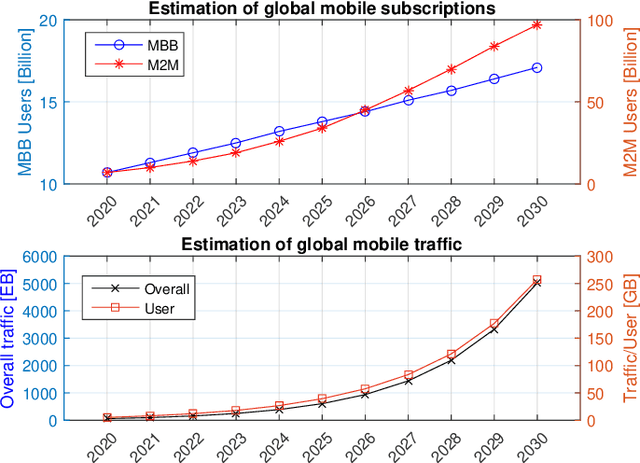
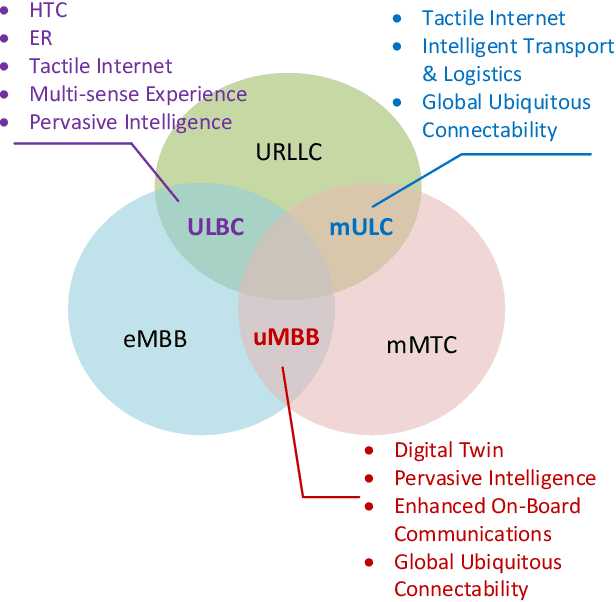
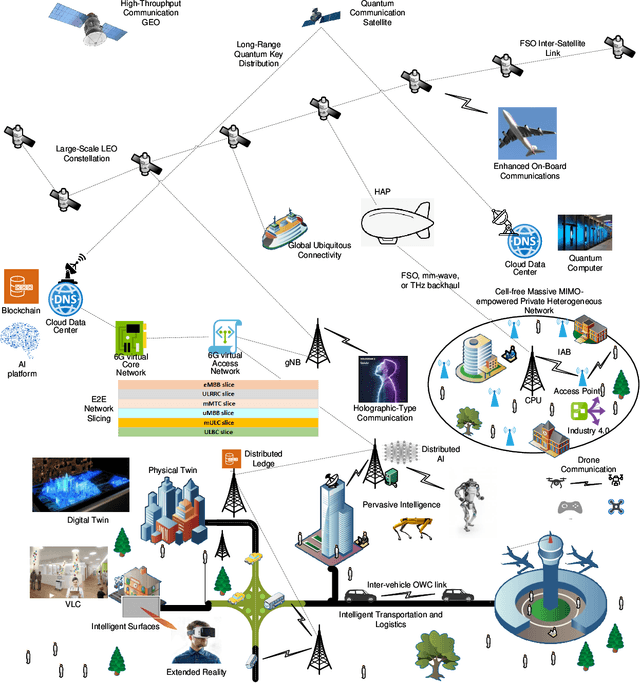
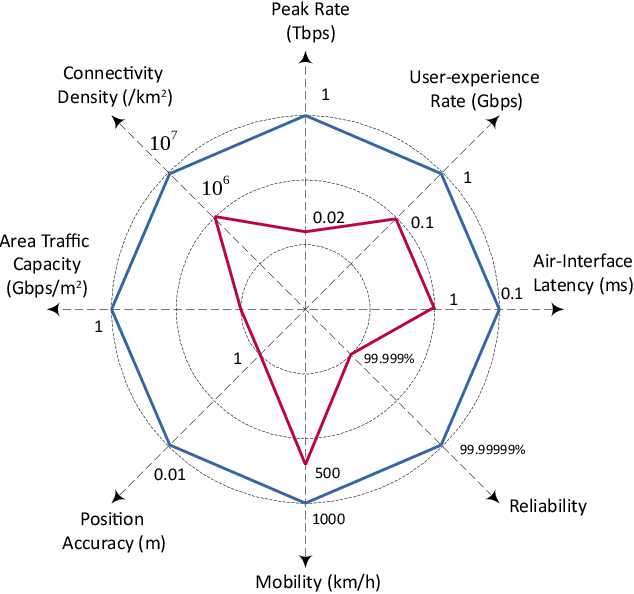
As of today, the fifth generation (5G) mobile communication system has been rolled out in many countries and the number of 5G subscribers already reaches a very large scale. It is time for academia and industry to shift their attention towards the next generation. At this crossroad, an overview of the current state of the art and a vision of future communications are definitely of interest. This article thus aims to provide a comprehensive survey to draw a picture of the sixth generation (6G) system in terms of drivers, use cases, usage scenarios, requirements, key performance indicators (KPIs), architecture, and enabling technologies. First, we attempt to answer the question of "Is there any need for 6G?" by shedding light on its key driving factors, in which we predict the explosive growth of mobile traffic until 2030, and envision potential use cases and usage scenarios. Second, the technical requirements of 6G are discussed and compared with those of 5G with respect to a set of KPIs in a quantitative manner. Third, the state-of-the-art 6G research efforts and activities from representative institutions and countries are summarized, and a tentative roadmap of definition, specification, standardization, and regulation is projected. Then, we identify a dozen of potential technologies and introduce their principles, advantages, challenges, and open research issues. Finally, the conclusions are drawn to paint a picture of "What 6G may look like?". This survey is intended to serve as an enlightening guideline to spur interests and further investigations for subsequent research and development of 6G communications systems.
The Consequences of the Framing of Machine Learning Risk Prediction Models: Evaluation of Sepsis in General Wards
Jan 26, 2021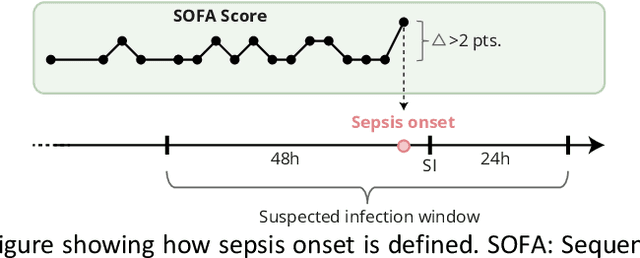

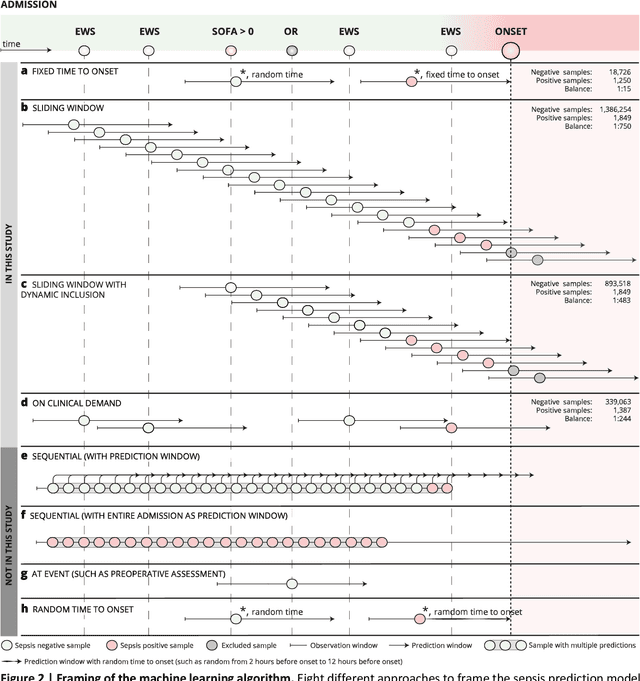

Objectives: To evaluate the consequences of the framing of machine learning risk prediction models. We evaluate how framing affects model performance and model learning in four different approaches previously applied in published artificial-intelligence (AI) models. Setting and participants: We analysed structured secondary healthcare data from 221,283 citizens from four Danish municipalities who were 18 years of age or older. Results: The four models had similar population level performance (a mean area under the receiver operating characteristic curve of 0.73 to 0.82), in contrast to the mean average precision, which varied greatly from 0.007 to 0.385. Correspondingly, the percentage of missing values also varied between framing approaches. The on-clinical-demand framing, which involved samples for each time the clinicians made an early warning score assessment, showed the lowest percentage of missing values among the vital sign parameters, and this model was also able to learn more temporal dependencies than the others. The Shapley additive explanations demonstrated opposing interpretations of SpO2 in the prediction of sepsis as a consequence of differentially framed models. Conclusions: The profound consequences of framing mandate attention from clinicians and AI developers, as the understanding and reporting of framing are pivotal to the successful development and clinical implementation of future AI technology. Model framing must reflect the expected clinical environment. The importance of proper problem framing is by no means exclusive to sepsis prediction and applies to most clinical risk prediction models.
On-Manifold Preintegration for Real-Time Visual-Inertial Odometry
Oct 30, 2016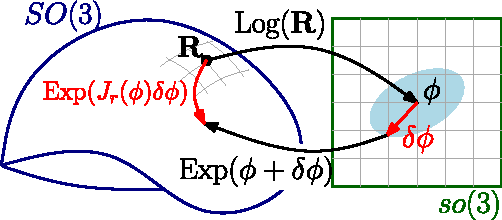
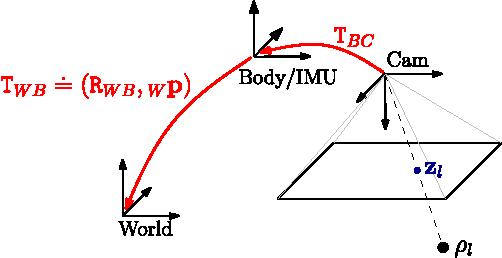
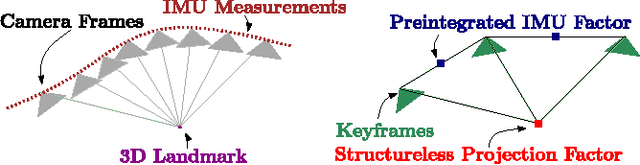
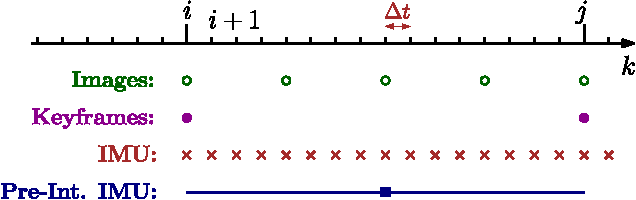
Current approaches for visual-inertial odometry (VIO) are able to attain highly accurate state estimation via nonlinear optimization. However, real-time optimization quickly becomes infeasible as the trajectory grows over time, this problem is further emphasized by the fact that inertial measurements come at high rate, hence leading to fast growth of the number of variables in the optimization. In this paper, we address this issue by preintegrating inertial measurements between selected keyframes into single relative motion constraints. Our first contribution is a \emph{preintegration theory} that properly addresses the manifold structure of the rotation group. We formally discuss the generative measurement model as well as the nature of the rotation noise and derive the expression for the \emph{maximum a posteriori} state estimator. Our theoretical development enables the computation of all necessary Jacobians for the optimization and a-posteriori bias correction in analytic form. The second contribution is to show that the preintegrated IMU model can be seamlessly integrated into a visual-inertial pipeline under the unifying framework of factor graphs. This enables the application of incremental-smoothing algorithms and the use of a \emph{structureless} model for visual measurements, which avoids optimizing over the 3D points, further accelerating the computation. We perform an extensive evaluation of our monocular \VIO pipeline on real and simulated datasets. The results confirm that our modelling effort leads to accurate state estimation in real-time, outperforming state-of-the-art approaches.