 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Time Series Motion Generation Considering Long Short-Term Motion
Sep 19, 2019
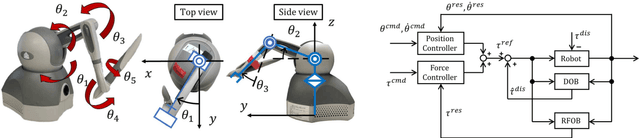
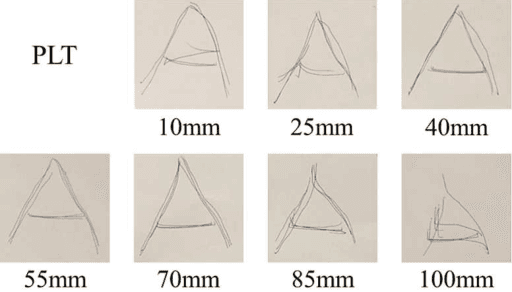
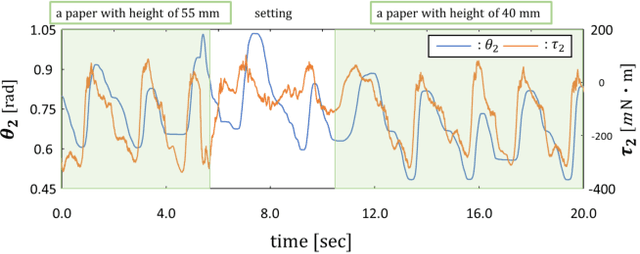
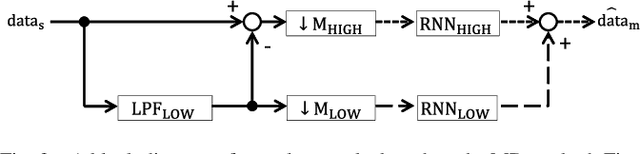
Various adaptive abilities are required for robots interacting with humans in daily life. It is difficult to design adaptive algorithms manually; however, by using end-to-end machine learning, labor can be saved during the design process. In our previous research, a task requiring force adjustment was achieved through imitation learning that considered position and force information using a four-channel bilateral control. Unfortunately, tasks that include long-term (slow) motion are still challenging. Furthermore, during system identification, there is a method known as the multi-decimation (MD) identification method. It separates lower and higher frequencies, and then identifies the parameters characterized at each frequency. Therefore, we proposed utilizing machine learning to take advantage of the MD method to infer short-term and long-term (high and low frequency, respectively) motion. In this paper, long-term motion tasks such as writing a letter using a pen fixed on a robot are discussed. We found differences in suitable sampling periods between position and force information. The validity of the proposed method was then experimentally verified, showing the importance of long-term inference with adequate sampling periods.
Asymptotically Optimal Information-Directed Sampling
Nov 11, 2020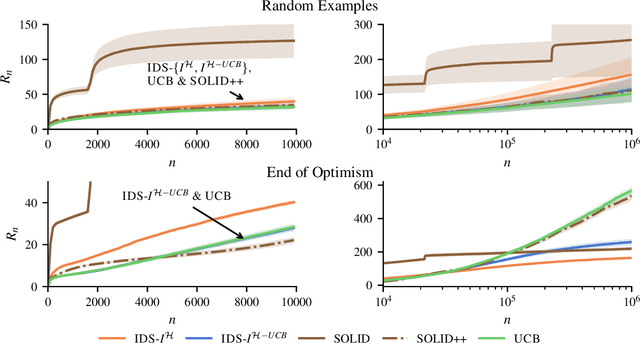
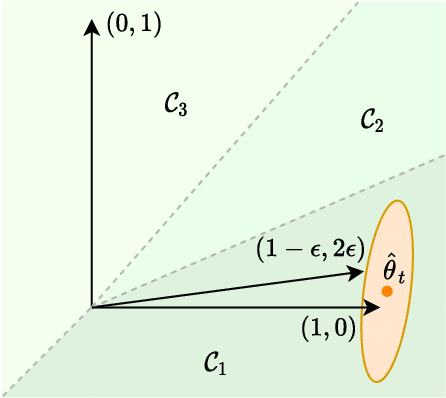
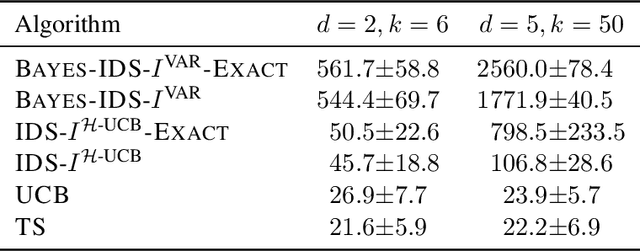
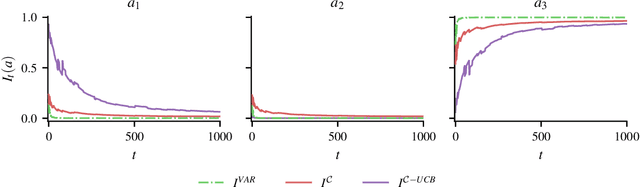
We introduce a computationally efficient algorithm for finite stochastic linear bandits. The approach is based on the frequentist information-directed sampling (IDS) framework, with an information gain potential that is derived directly from the asymptotic regret lower bound. We establish frequentist regret bounds, which show that the proposed algorithm is both asymptotically optimal and worst-case rate optimal in finite time. Our analysis sheds light on how IDS trades off regret and information to incrementally solve the semi-infinite concave program that defines the optimal asymptotic regret. Along the way, we uncover interesting connections towards a recently proposed two-player game approach and the Bayesian IDS algorithm.
Pixel precise unsupervised detection of viral particle proliferation in cellular imaging data
Nov 10, 2020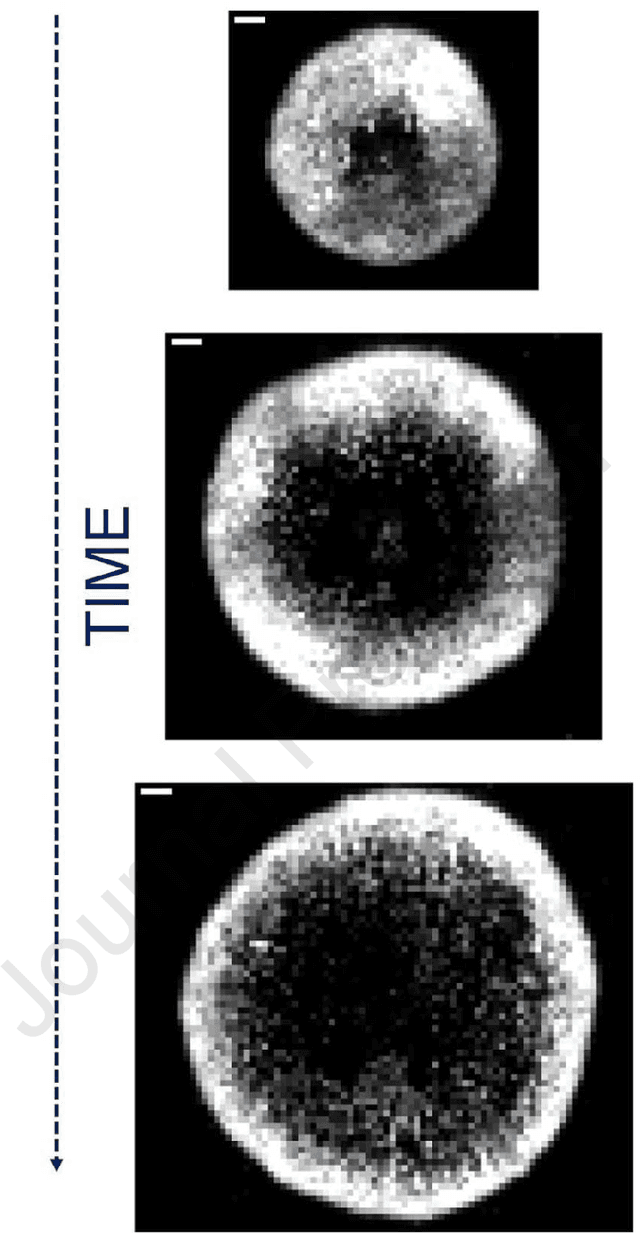
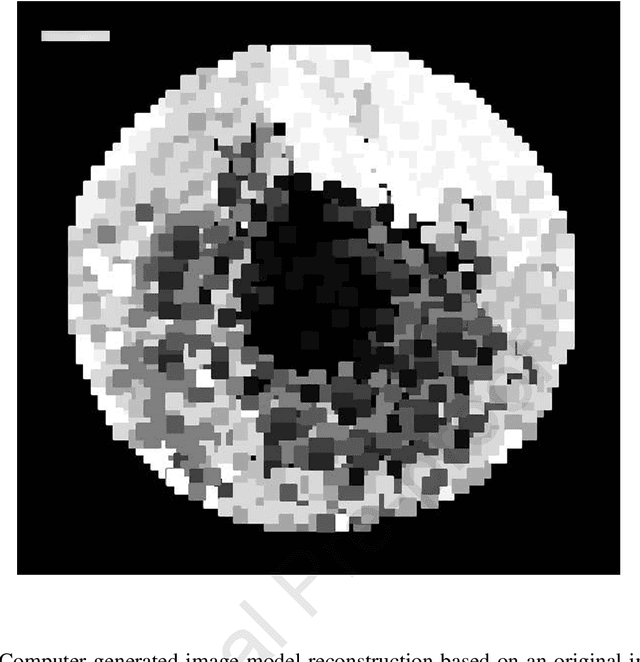
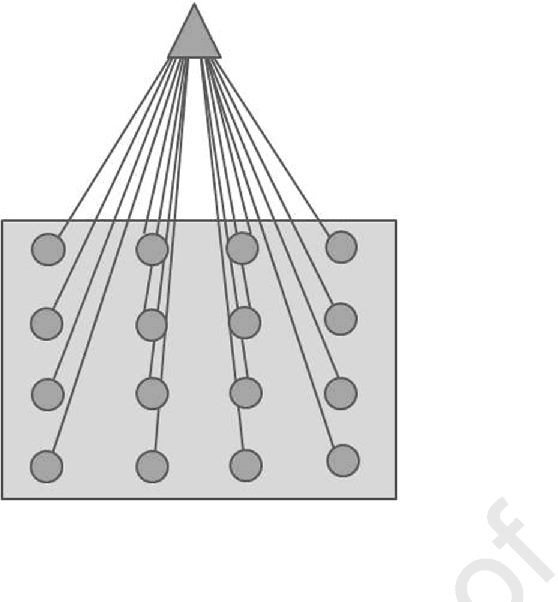
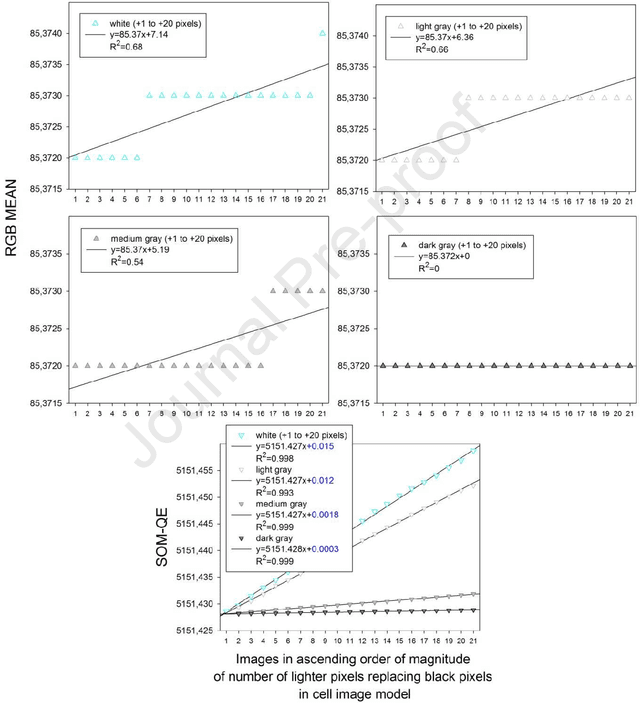
Cellular and molecular imaging techniques and models have been developed to characterize single stages of viral proliferation after focal infection of cells in vitro. The fast and automatic classification of cell imaging data may prove helpful prior to any further comparison of representative experimental data to mathematical models of viral propagation in host cells. Here, we use computer generated images drawn from a reproduction of an imaging model from a previously published study of experimentally obtained cell imaging data representing progressive viral particle proliferation in host cell monolayers. Inspired by experimental time-based imaging data, here in this study viral particle increase in time is simulated by a one-by-one increase, across images, in black or gray single pixels representing dead or partially infected cells, and hypothetical remission by a one-by-one increase in white pixels coding for living cells in the original image model. The image simulations are submitted to unsupervised learning by a Self-Organizing Map (SOM) and the Quantization Error in the SOM output (SOM-QE) is used for automatic classification of the image simulations as a function of the represented extent of viral particle proliferation or cell recovery. Unsupervised classification by SOM-QE of 160 model images, each with more than three million pixels, is shown to provide a statistically reliable, pixel precise, and fast classification model that outperforms human computer-assisted image classification by RGB image mean computation. The automatic classification procedure proposed here provides a powerful approach to understand finely tuned mechanisms in the infection and proliferation of virus in cell lines in vitro or other cells.
Green Offloading in Fog-Assisted IoT Systems: An Online Perspective Integrating Learning and Control
Aug 01, 2020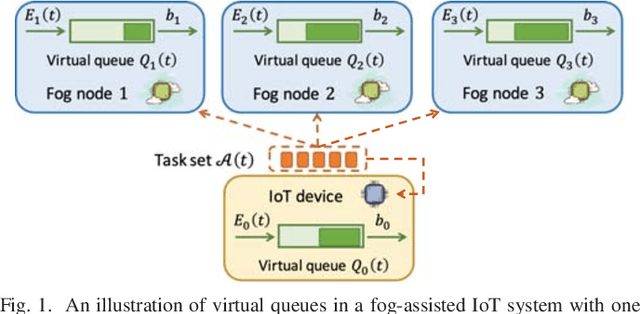
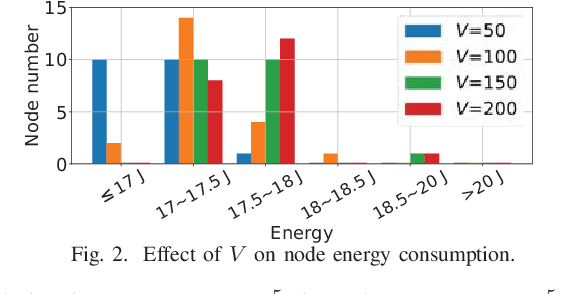
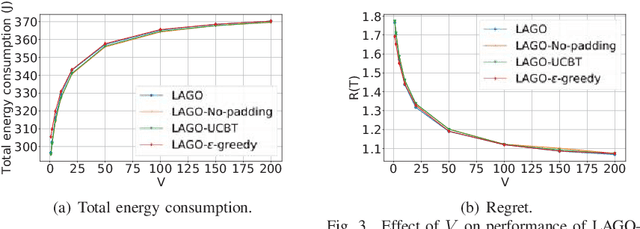
In fog-assisted IoT systems, it is a common practice to offload tasks from IoT devices to their nearby fog nodes to reduce task processing latencies and energy consumptions. However, the design of online energy-efficient scheme is still an open problem because of various uncertainties in system dynamics such as processing capacities and transmission rates. Moreover, the decision-making process is constrained by resource limits on fog nodes and IoT devices, making the design even more complicated. In this paper, we formulate such a task offloading problem with unknown system dynamics as a combinatorial multi-armed bandit (CMAB) problem with long-term constraints on time-averaged energy consumptions. Through an effective integration of online learning and online control, we propose a \textit{Learning-Aided Green Offloading} (LAGO) scheme. In LAGO, we employ bandit learning methods to handle the exploitation-exploration tradeoff and utilize virtual queue techniques to deal with the long-term constraints. Our theoretical analysis shows that LAGO can reduce the average task latency with a tunable sublinear regret bound over a finite time horizon and satisfy the long-term time-averaged energy constraints. We conduct extensive simulations to verify such theoretical results.
Data-Driven Bandit Learning for Proactive Cache Placement in Fog-Assisted IoT Systems
Aug 01, 2020
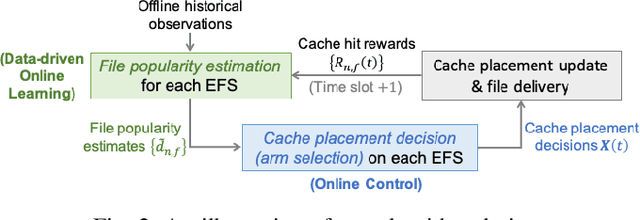
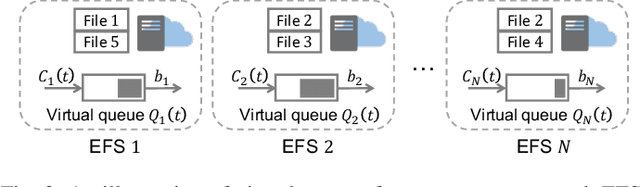
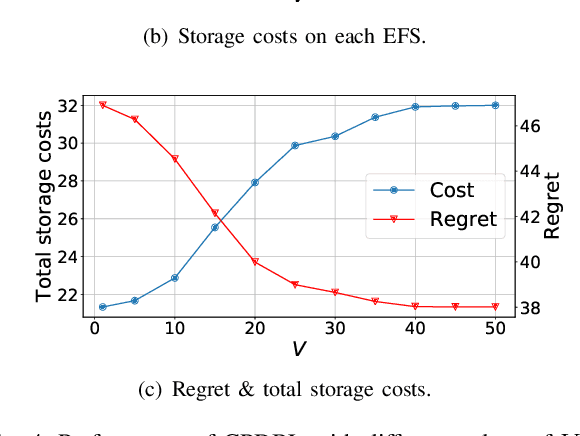
In Fog-assisted IoT systems, it is a common practice to cache popular content at the network edge to achieve high quality of service. Due to uncertainties in practice such as unknown file popularities, cache placement scheme design is still an open problem with unresolved challenges: 1) how to maintain time-averaged storage costs under budgets, 2) how to incorporate online learning to aid cache placement to minimize performance loss (a.k.a. regret), and 3) how to exploit offline history information to further reduce regret. In this paper, we formulate the cache placement problem with unknown file popularities as a constrained combinatorial multi-armed bandit (CMAB) problem. To solve the problem, we employ virtual queue techniques to manage time-averaged constraints, and adopt data-driven bandit learning methods to integrate offline history information into online learning to handle exploration-exploitation tradeoff. With an effective combination of online control and data-driven online learning, we devise a Cache Placement scheme with Data-driven Bandit Learning called CPDBL. Our theoretical analysis and simulations show that CPDBL achieves a sublinear time-averaged regret under long-term storage cost constraints.
It is time for Factor Graph Optimization for GNSS/INS Integration: Comparison between FGO and EKF
Apr 24, 2020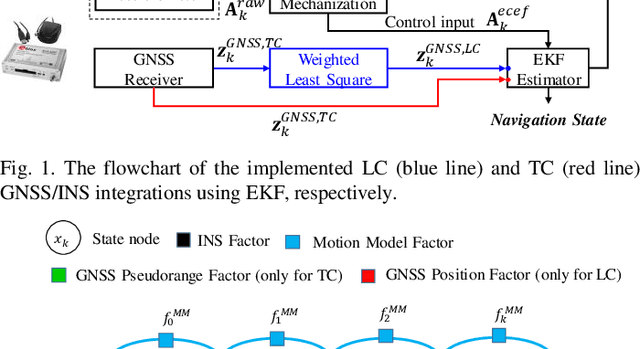
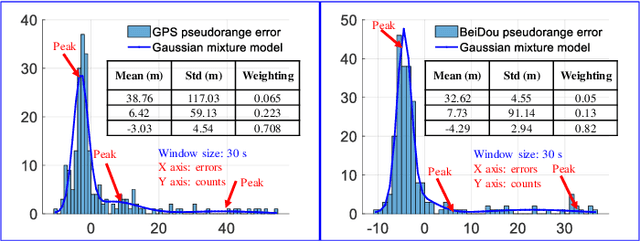
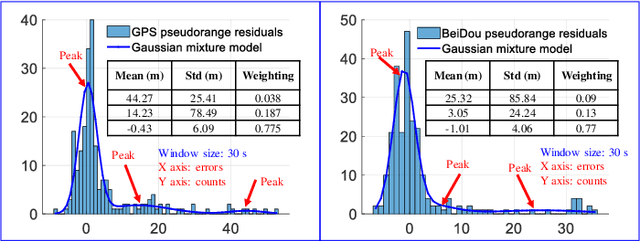
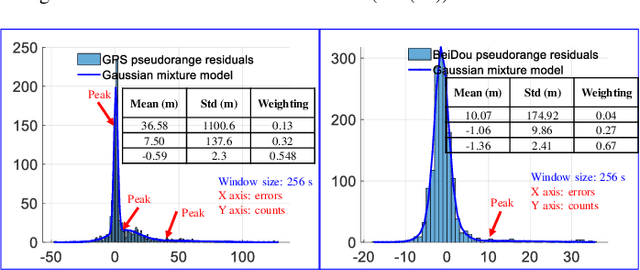
The recently proposed factor graph optimization (FGO) is adopted to integrate GNSS/INS attracted lots of attention and improved the performance over the existing EKF-based GNSS/INS integrations. However, a comprehensive comparison of those two GNSS/INS integration schemes in the urban canyon is not available. Moreover, the performance of the FGO-based GNSS/INS integration rely heavily on the size of the window of optimization. Effectively tuning the window size is still an open question. To fill this gap, this paper evaluates both loosely and tightly-coupled integrations using both EKF and FGO via the challenging dataset collected in the urban canyon. The detailed analysis of the results for the advantages of the FGO is also given in this paper by degenerating the FGO-based estimator to an EKF like estimator. More importantly, we analyze the effects of window size against the performance of FGO, by considering both the GNSS pseudorange error distribution and environmental conditions.
Towards Optimally Efficient Tree Search with Deep Temporal Difference Learning
Jan 07, 2021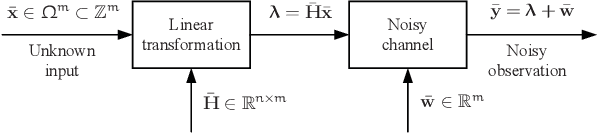
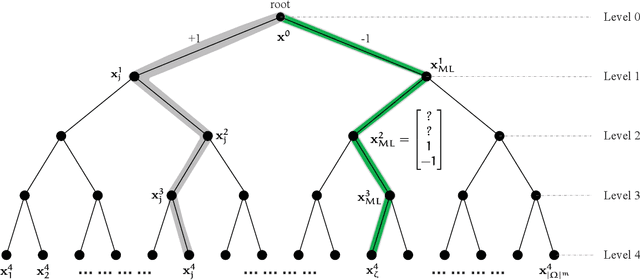
This paper investigates the classical integer least-squares problem which estimates integer signals from linear models. The problem is NP-hard and often arises in diverse applications such as signal processing, bioinformatics, communications and machine learning, to name a few. Since the existing optimal search strategies involve prohibitive complexities, they are hard to be adopted in large-scale problems. To address this issue, we propose a general hyper-accelerated tree search (HATS) algorithm by employing a deep neural network to estimate the optimal heuristic for the underlying simplified memory-bounded A* algorithm, and the proposed algorithm can be easily generalized with other heuristic search algorithms. Inspired by the temporal difference learning, we further propose a training strategy which enables the network to approach the optimal heuristic precisely and consistently, thus the proposed algorithm can reach nearly the optimal efficiency when the estimation error is small enough. Experiments show that the proposed algorithm can reach almost the optimal maximum likelihood estimate performance in large-scale problems, with a very low complexity in both time and space. The code of this paper is avaliable at https://github.com/skypitcher/hats.
A Unified Lottery Ticket Hypothesis for Graph Neural Networks
Feb 12, 2021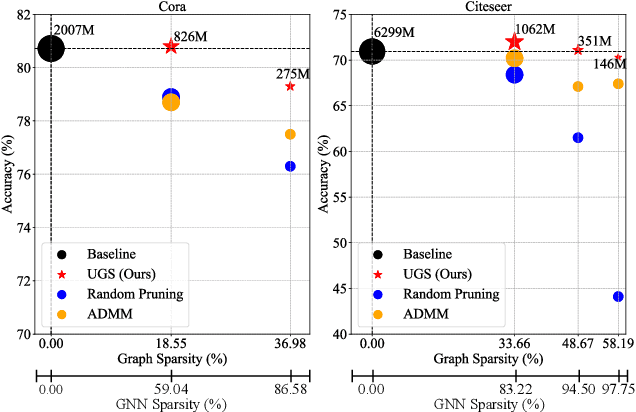
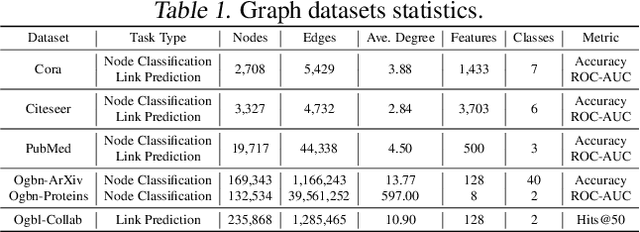
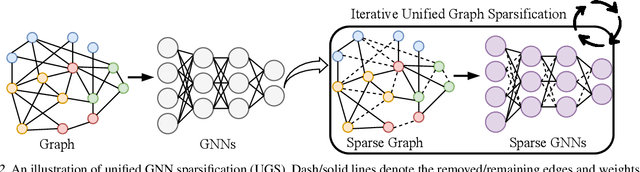
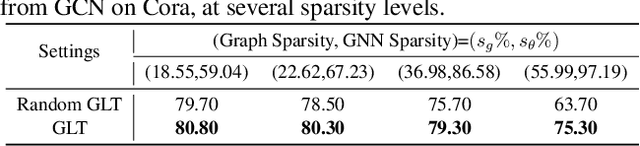
With graphs rapidly growing in size and deeper graph neural networks (GNNs) emerging, the training and inference of GNNs become increasingly expensive. Existing network weight pruning algorithms cannot address the main space and computational bottleneck in GNNs, caused by the size and connectivity of the graph. To this end, this paper first presents a unified GNN sparsification (UGS) framework that simultaneously prunes the graph adjacency matrix and the model weights, for effectively accelerating GNN inference on large-scale graphs. Leveraging this new tool, we further generalize the recently popular lottery ticket hypothesis to GNNs for the first time, by defining a graph lottery ticket (GLT) as a pair of core sub-dataset and sparse sub-network, which can be jointly identified from the original GNN and the full dense graph by iteratively applying UGS. Like its counterpart in convolutional neural networks, GLT can be trained in isolation to match the performance of training with the full model and graph, and can be drawn from both randomly initialized and self-supervised pre-trained GNNs. Our proposal has been experimentally verified across various GNN architectures and diverse tasks, on both small-scale graph datasets (Cora, Citeseer and PubMed), and large-scale datasets from the challenging Open Graph Benchmark (OGB). Specifically, for node classification, our found GLTs achieve the same accuracies with 20%~98% MACs saving on small graphs and 25%~85% MACs saving on large ones. For link prediction, GLTs lead to 48%~97% and 70% MACs saving on small and large graph datasets, respectively, without compromising predictive performance. Codes available at https://github.com/VITA-Group/Unified-LTH-GNN.
Real-Time Optical flow-based Video Stabilization for Unmanned Aerial Vehicles
Jan 13, 2017
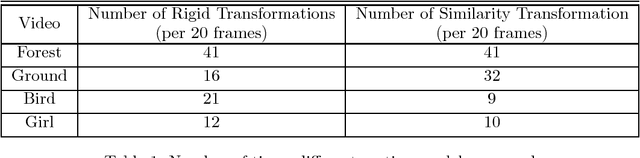

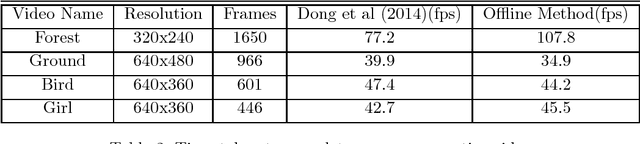
This paper describes the development of a novel algorithm to tackle the problem of real-time video stabilization for unmanned aerial vehicles (UAVs). There are two main components in the algorithm: (1) By designing a suitable model for the global motion of UAV, the proposed algorithm avoids the necessity of estimating the most general motion model, projective transformation, and considers simpler motion models, such as rigid transformation and similarity transformation. (2) To achieve a high processing speed, optical-flow based tracking is employed in lieu of conventional tracking and matching methods used by state-of-the-art algorithms. These two new ideas resulted in a real-time stabilization algorithm, developed over two phases. Stage I considers processing the whole sequence of frames in the video while achieving an average processing speed of 50fps on several publicly available benchmark videos. Next, Stage II undertakes the task of real-time video stabilization using a multi-threading implementation of the algorithm designed in Stage I.
Quantifying the relationship between student enrollment patterns and student performance
Mar 22, 2020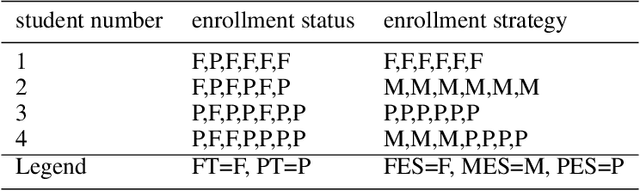

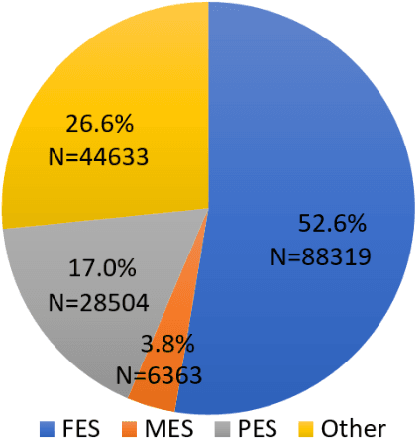
College students are enrolled at each semester with either part time or full time status. While most of the students keep an overall constant enrollment status during their education period, some of them may frequently change their status between full time and part time from one semester to the next. The goal of this research is to exploit the historic patterns to estimate and categorize students$'$ strategy in three different groups of part time, full time and mixed, investigate the educational features of each group and compare their performance. Enrollment strategy refers to the student$'$s mindset for enrollment plan and in one way can be captured from the student$'$s historic enrollment status. Data is collected from the University of Central Florida from 2008 to 2017 and Hidden Markov Model is applied to identify different types of student strategy. Results show that students with Mixed Enrollment Strategy (MES) have features (ex. time to graduation and graduation and halt enrollment ratio) and performances (ex. cumulative GPA) relatively between students with Full time Enrollment Strategy (FES) and students with Part time Enrollment Strategy (PES).