 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Damage detection in operational wind turbine blades using a new approach based on machine learning
Jan 25, 2021
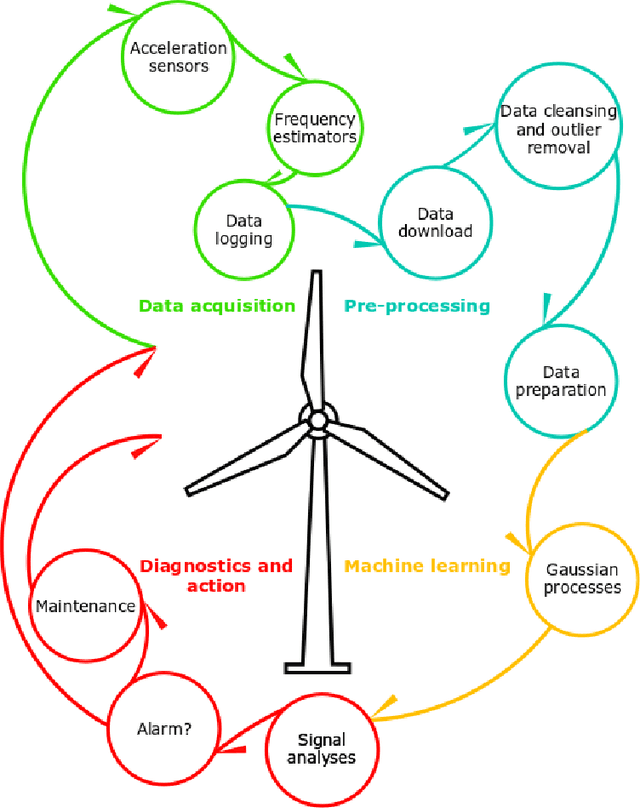
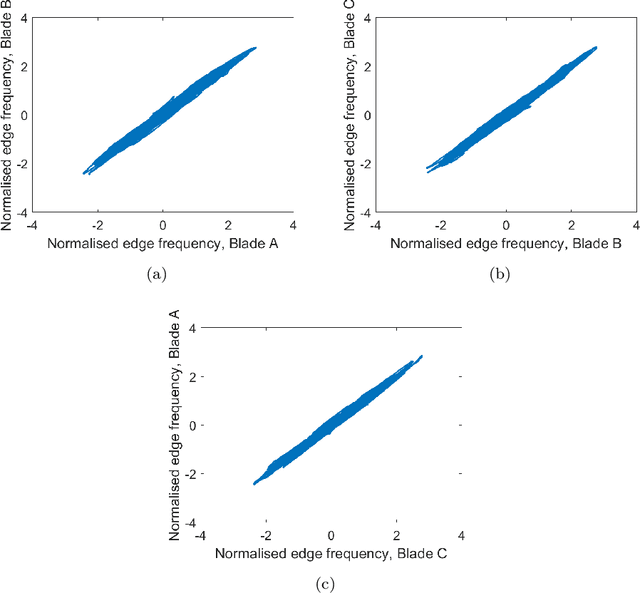
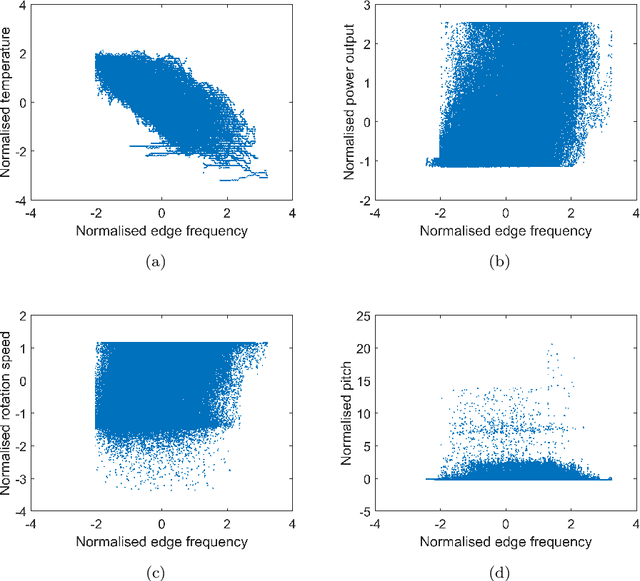
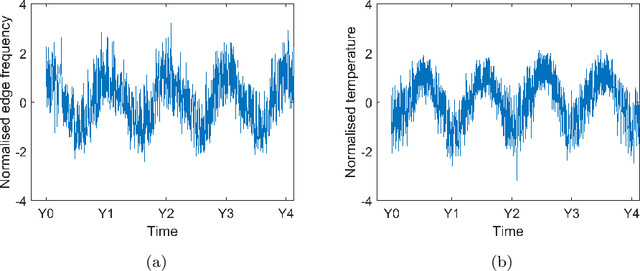
The application of reliable structural health monitoring (SHM) technologies to operational wind turbine blades is a challenging task, due to the uncertain nature of the environments they operate in. In this paper, a novel SHM methodology, which uses Gaussian Processes (GPs) is proposed. The methodology takes advantage of the fact that the blades on a turbine are nominally identical in structural properties and encounter the same environmental and operational variables (EOVs). The properties of interest are the first edgewise frequencies of the blades. The GPs are used to predict the edge frequencies of one blade given that of another, after these relationships between the pairs of blades have been learned when the blades are in a healthy state. In using this approach, the proposed SHM methodology is able to identify when the blades start behaving differently from one another over time. To validate the concept, the proposed SHM system is applied to real onshore wind turbine blade data, where some form of damage was known to have taken place. X-bar control chart analysis of the residual errors between the GP predictions and actual frequencies show that the system successfully identified early onset of damage as early as six months before it was identified and remedied.
A Missing Data Imputation Method for 3D Object Reconstruction using Multi-modal Variational Autoencoder
Jan 25, 2021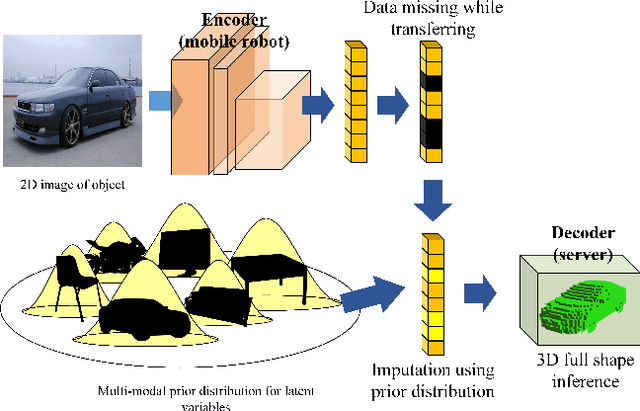
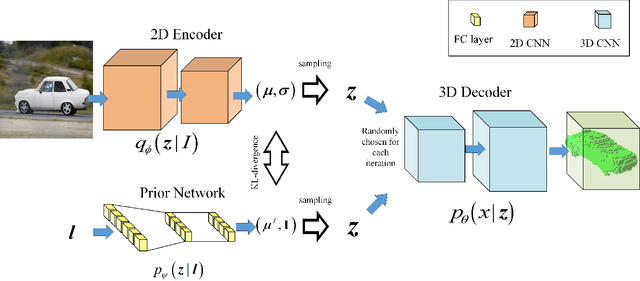
For effective human-robot teaming, it is importantfor the robots to be able to share their visual perceptionwith the human operators. In a harsh remote collaborationsetting, however, it is especially challenging to transfer a largeamount of sensory data over a low-bandwidth network in real-time, e.g., for the task of 3D shape reconstruction given 2Dcamera images. To reduce the burden of data transferring, datacompression techniques such as autoencoder can be utilized toobtain and transmit the data in terms of latent variables in acompact form. However, due to the low-bandwidth limitation orcommunication delay, some of the dimensions of latent variablescan be lost in transit, degenerating the reconstruction results.Moreover, in order to achieve faster transmission, an intentionalover compression can be used where only partial elements ofthe latent variables are used. To handle these incomplete datacases, we propose a method for imputation of latent variableswhose elements are partially lost or manually excluded. Toperform imputation with only some dimensions of variables,exploiting prior information of the category- or instance-levelis essential. In general, a prior distribution used in variationalautoencoders is achieved from all of the training datapointsregardless of their labels. This type of flattened prior makes itdifficult to perform imputation from the category- or instance-level distributions.
Learning low-frequency temporal patterns for quantitative trading
Aug 12, 2020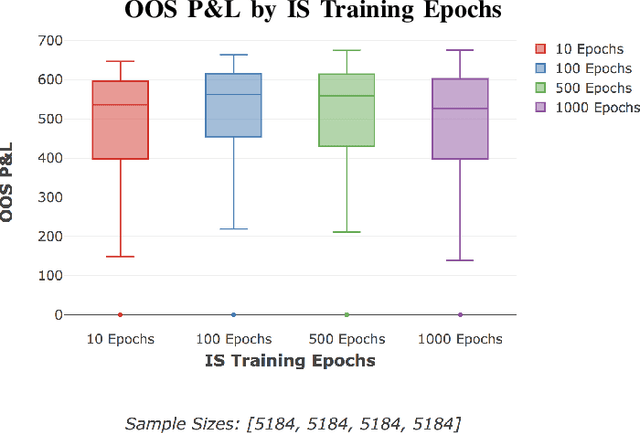
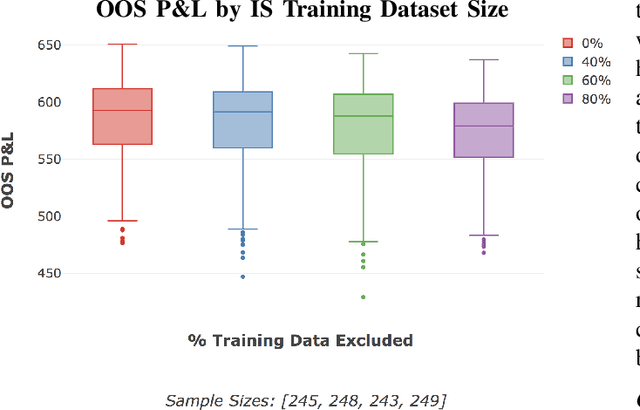
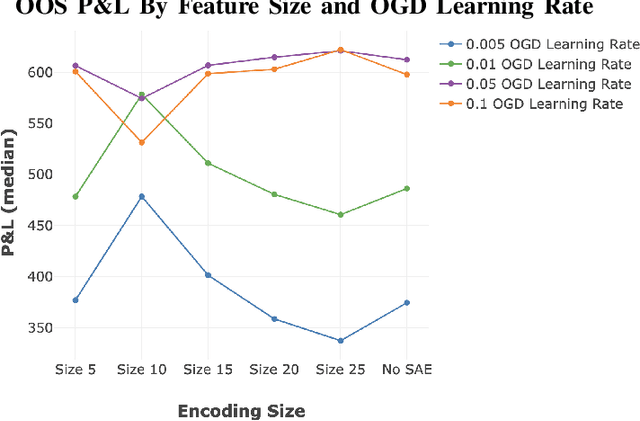
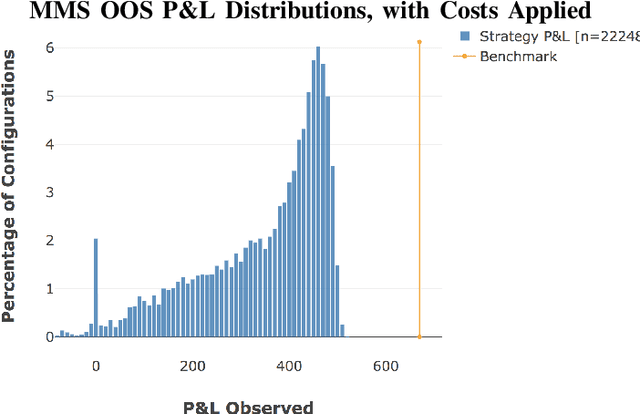
We consider the viability of a modularised mechanistic online machine learning framework to learn signals in low-frequency financial time series data. The framework is proved on daily sampled closing time-series data from JSE equity markets. The input patterns are vectors of pre-processed sequences of daily, weekly and monthly or quarterly sampled feature changes. The data processing is split into a batch processed step where features are learnt using a stacked autoencoder via unsupervised learning, and then both batch and online supervised learning are carried out using these learnt features, with the output being a point prediction of measured time-series feature fluctuations. Weight initializations are implemented with restricted Boltzmann machine pre-training, and variance based initializations. Historical simulations are then run using an online feedforward neural network initialised with the weights from the batch training and validation step. The validity of results are considered under a rigorous assessment of backtest overfitting using both combinatorially symmetrical cross validation and probabilistic and deflated Sharpe ratios. Results are used to develop a view on the phenomenology of financial markets and the value of complex historical data-analysis for trading under the unstable adaptive dynamics that characterise financial markets.
Driving Tasks Transfer in Deep Reinforcement Learning for Decision-making of Autonomous Vehicles
Sep 07, 2020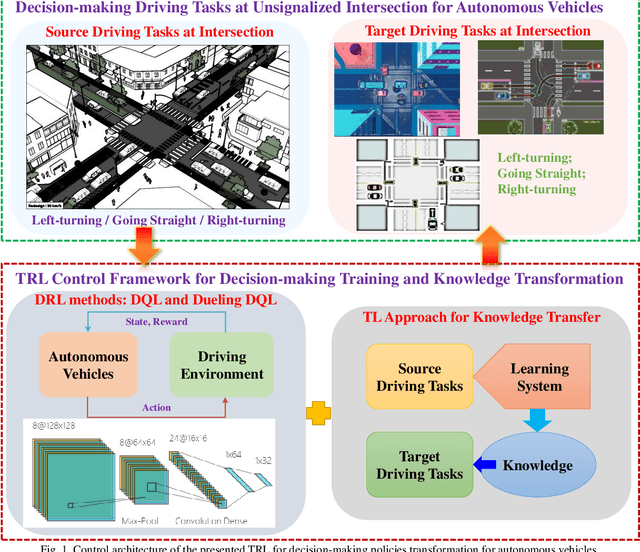
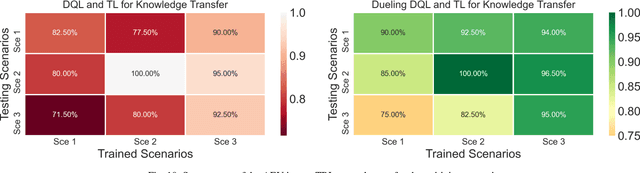
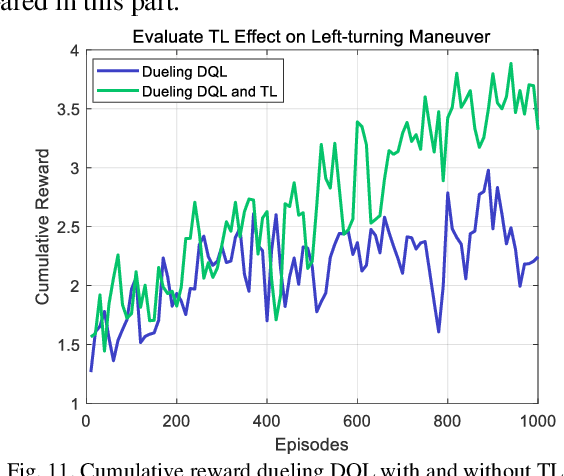
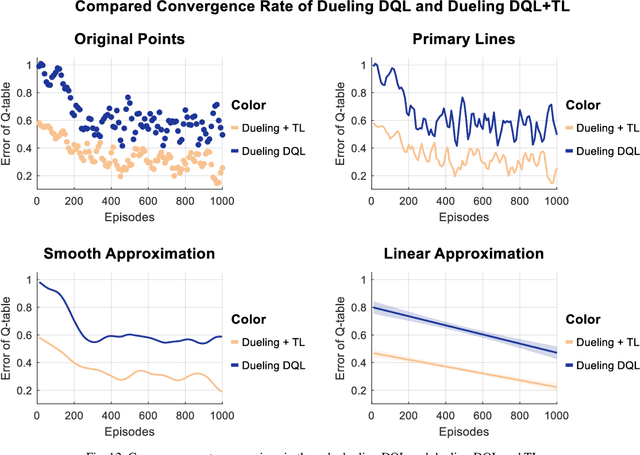
Knowledge transfer is a promising concept to achieve real-time decision-making for autonomous vehicles. This paper constructs a transfer deep reinforcement learning framework to transform the driving tasks in inter-section environments. The driving missions at the un-signalized intersection are cast into a left turn, right turn, and running straight for automated vehicles. The goal of the autonomous ego vehicle (AEV) is to drive through the intersection situation efficiently and safely. This objective promotes the studied vehicle to increase its speed and avoid crashing other vehicles. The decision-making pol-icy learned from one driving task is transferred and evaluated in another driving mission. Simulation results reveal that the decision-making strategies related to similar tasks are transferable. It indicates that the presented control framework could reduce the time consumption and realize online implementation.
Real-time force control of an SEA-based body weight support unit with the 2-DOF control structure
Sep 11, 2018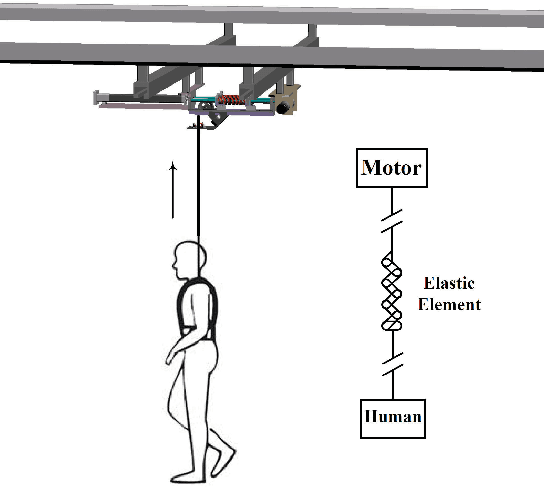
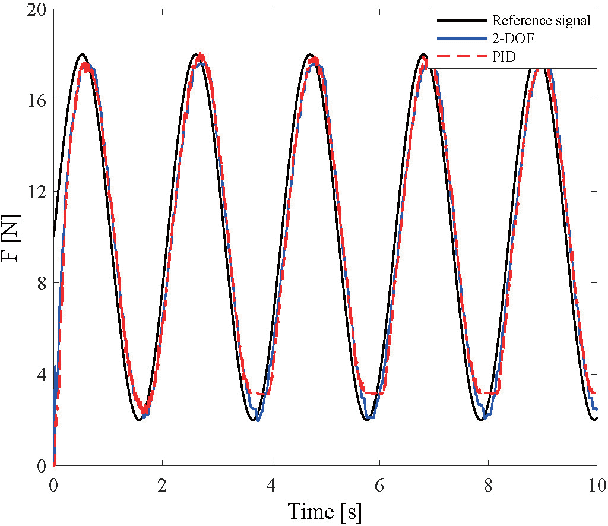
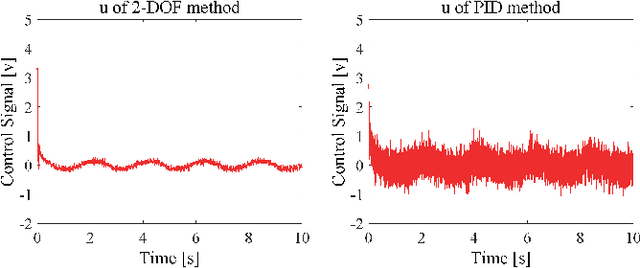
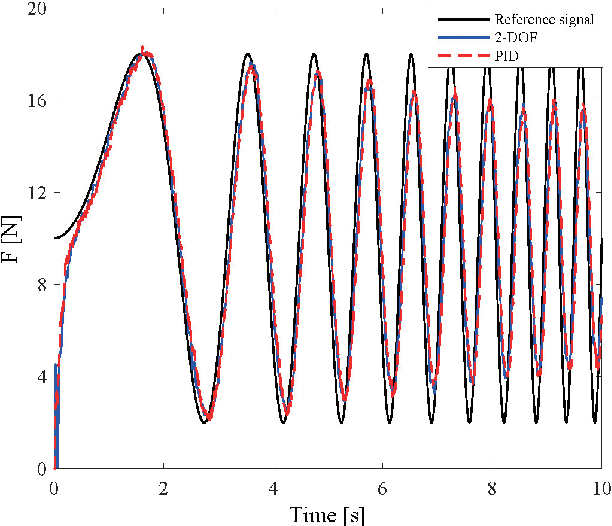
Body weight support (BWS) is a fundamental technique in rehabilitation. Along with the dramatic progressing of rehabilitation science and engineering, BWS is quickly evolving with new initiatives and has attracted deep research effort in recent years. We have built up a novel gravity offloading system, in which the patient is allowed to move freely in the three-dimensional Cartesian space and receives support against gravity. Thus, the patients, especially for those that suffer from neurological injury such as stroke or spinal cord injury, can focus their residual motor control capabilities on essential therapeutic trainings of balance and gait. The real-time force control performance is critical for the BWS unit to provide suitable support and avoid disturbance. In this work, we have re-designed our BWS unit with a series elastic actuation structure to improve the human-robot interaction performance. Further, the 2 degrees of freedom (2-DOF) control approach was taken for accurate and robust BWS force control. Both simulation and experimental results have validated the efficacy of the BWS design and real-time control methods.
Sampling Without Time: Recovering Echoes of Light via Temporal Phase Retrieval
Jan 27, 2017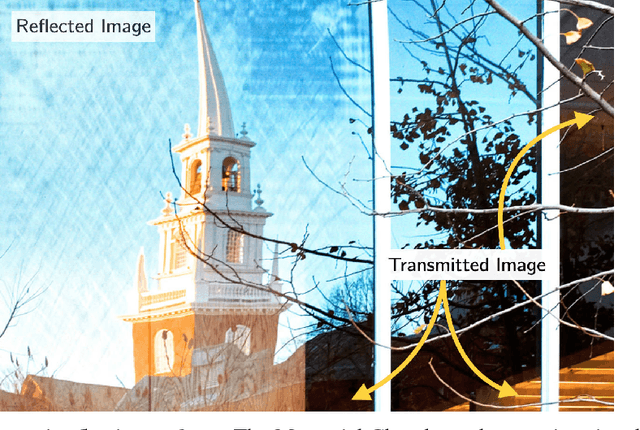
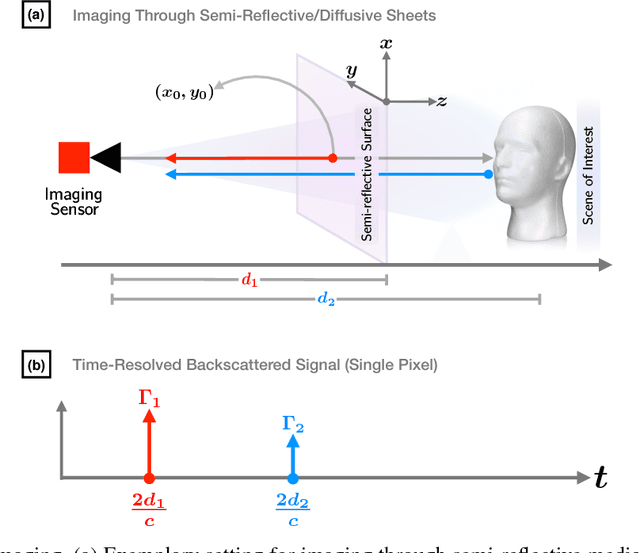
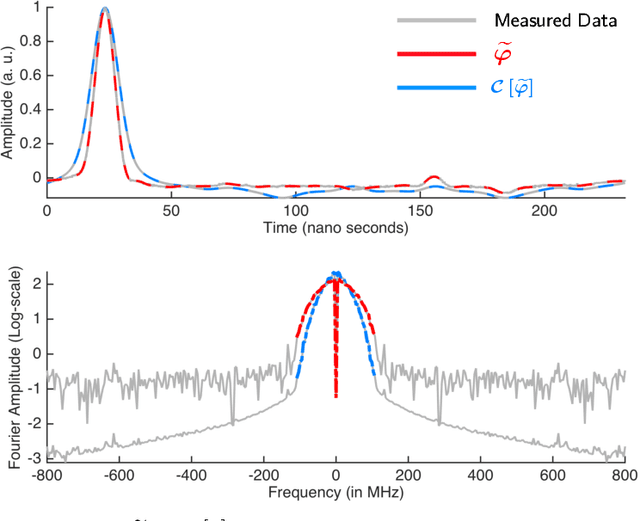
This paper considers the problem of sampling and reconstruction of a continuous-time sparse signal without assuming the knowledge of the sampling instants or the sampling rate. This topic has its roots in the problem of recovering multiple echoes of light from its low-pass filtered and auto-correlated, time-domain measurements. Our work is closely related to the topic of sparse phase retrieval and in this context, we discuss the advantage of phase-free measurements. While this problem is ill-posed, cues based on physical constraints allow for its appropriate regularization. We validate our theory with experiments based on customized, optical time-of-flight imaging sensors. What singles out our approach is that our sensing method allows for temporal phase retrieval as opposed to the usual case of spatial phase retrieval. Preliminary experiments and results demonstrate a compelling capability of our phase-retrieval based imaging device.
Self-adapting Robustness in Demand Learning
Nov 21, 2020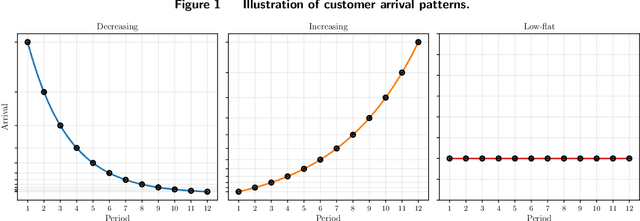
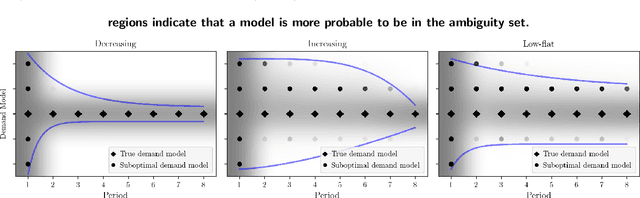
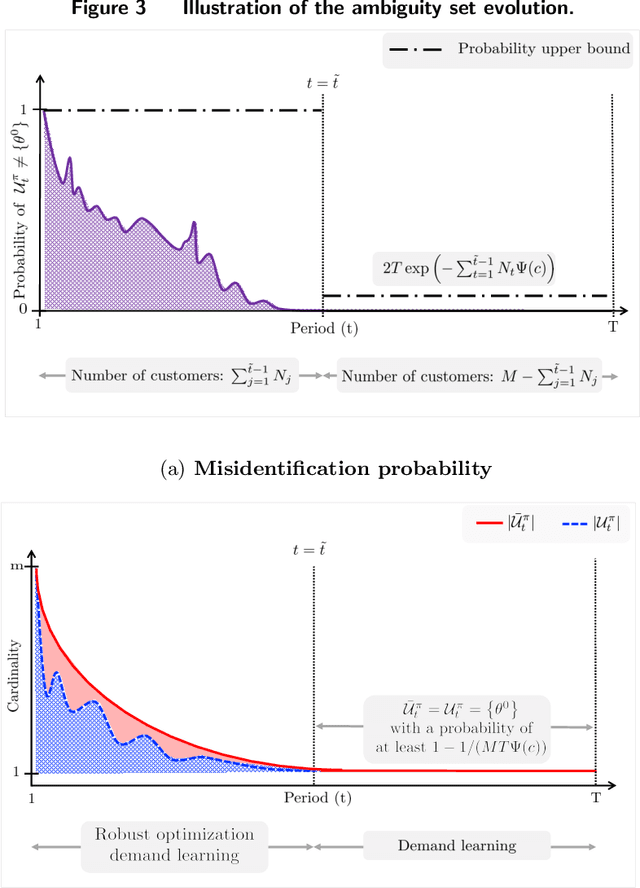
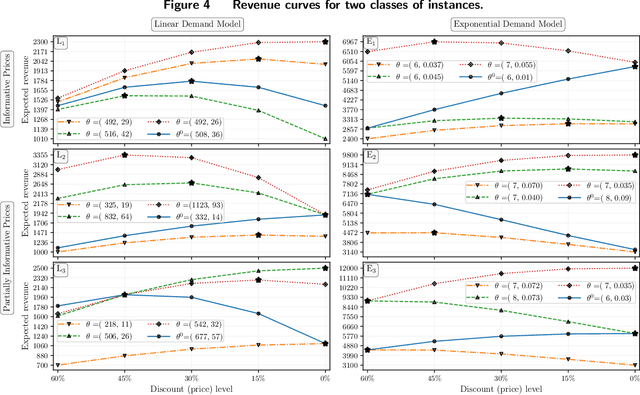
We study dynamic pricing over a finite number of periods in the presence of demand model ambiguity. Departing from the typical no-regret learning environment, where price changes are allowed at any time, pricing decisions are made at pre-specified points in time and each price can be applied to a large number of arrivals. In this environment, which arises in retailing, a pricing decision based on an incorrect demand model can significantly impact cumulative revenue. We develop an adaptively-robust-learning (ARL) pricing policy that learns the true model parameters from the data while actively managing demand model ambiguity. It optimizes an objective that is robust with respect to a self-adapting set of demand models, where a given model is included in this set only if the sales data revealed from prior pricing decisions makes it "probable". As a result, it gracefully transitions from being robust when demand model ambiguity is high to minimizing regret when this ambiguity diminishes upon receiving more data. We characterize the stochastic behavior of ARL's self-adapting ambiguity sets and derive a regret bound that highlights the link between the scale of revenue loss and the customer arrival pattern. We also show that ARL, by being conscious of both model ambiguity and revenue, bridges the gap between a distributionally robust policy and a follow-the-leader policy, which focus on model ambiguity and revenue, respectively. We numerically find that the ARL policy, or its extension thereof, exhibits superior performance compared to distributionally robust, follow-the-leader, and upper-confidence-bound policies in terms of expected revenue and/or value at risk.
Analyzing dynamical disorder for charge transport in organic semiconductors via machine learning
Feb 02, 2021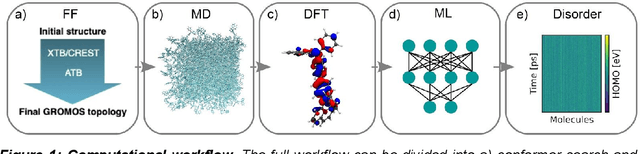
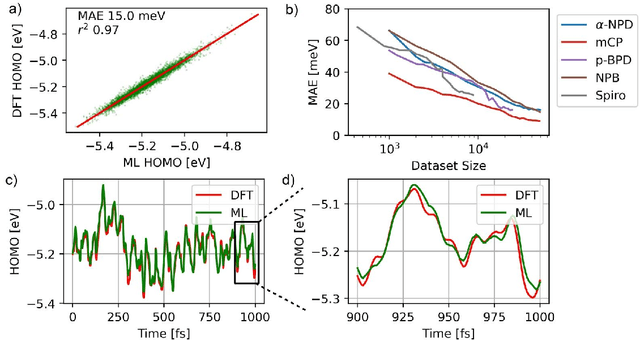
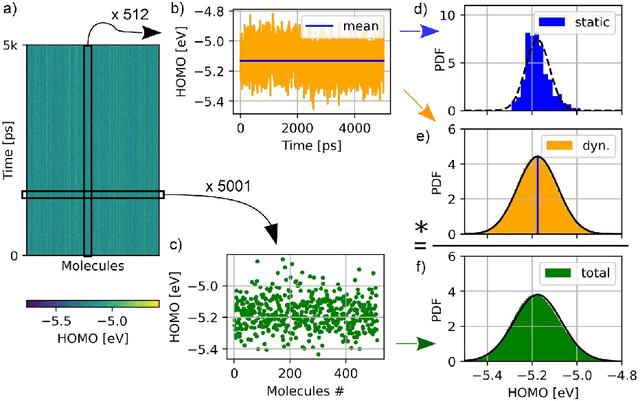
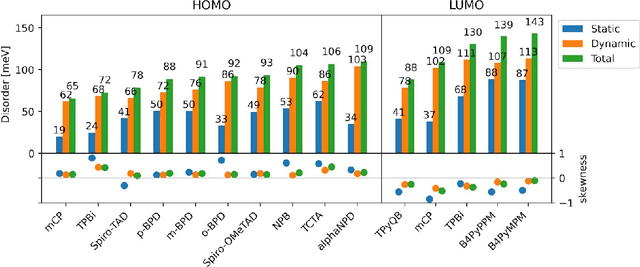
Organic semiconductors are indispensable for today's display technologies in form of organic light emitting diodes (OLEDs) and further optoelectronic applications. However, organic materials do not reach the same charge carrier mobility as inorganic semiconductors, limiting the efficiency of devices. To find or even design new organic semiconductors with higher charge carrier mobility, computational approaches, in particular multiscale models, are becoming increasingly important. However, such models are computationally very costly, especially when large systems and long time scales are required, which is the case to compute static and dynamic energy disorder, i.e. dominant factor to determine charge transport. Here we overcome this drawback by integrating machine learning models into multiscale simulations. This allows us to obtain unprecedented insight into relevant microscopic materials properties, in particular static and dynamic disorder contributions for a series of application-relevant molecules. We find that static disorder and thus the distribution of shallow traps is highly asymmetrical for many materials, impacting widely considered Gaussian disorder models. We furthermore analyse characteristic energy level fluctuation times and compare them to typical hopping rates to evaluate the importance of dynamic disorder for charge transport. We hope that our findings will significantly improve the accuracy of computational methods used to predict application relevant materials properties of organic semiconductors, and thus make these methods applicable for virtual materials design.
A Survey of Knowledge-based Sequential Decision Making under Uncertainty
Aug 19, 2020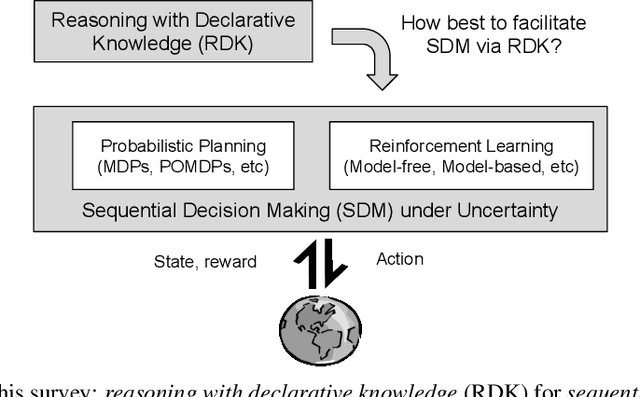
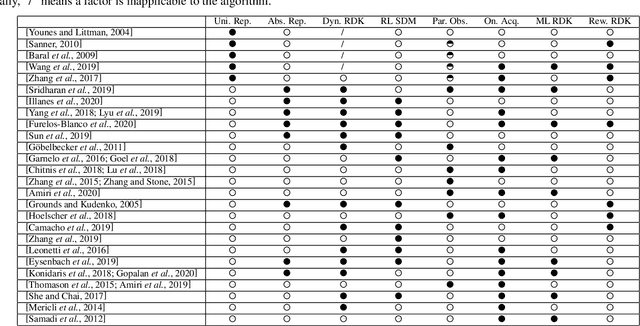
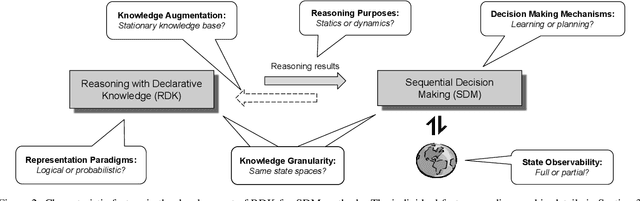
Reasoning with declarative knowledge (RDK) and sequential decision-making (SDM) are two key research areas in artificial intelligence. RDK methods reason with declarative domain knowledge, including commonsense knowledge, that is either provided a priori or acquired over time, while SDM methods (probabilistic planning and reinforcement learning) seek to compute action policies that maximize the expected cumulative utility over a time horizon; both classes of methods reason in the presence of uncertainty. Despite the rich literature in these two areas, researchers have not fully explored their complementary strengths. In this paper, we survey algorithms that leverage RDK methods while making sequential decisions under uncertainty. We discuss significant developments, open problems, and directions for future work.
Single Stage PFC Flyback AC-DC Converter Design
Dec 23, 2020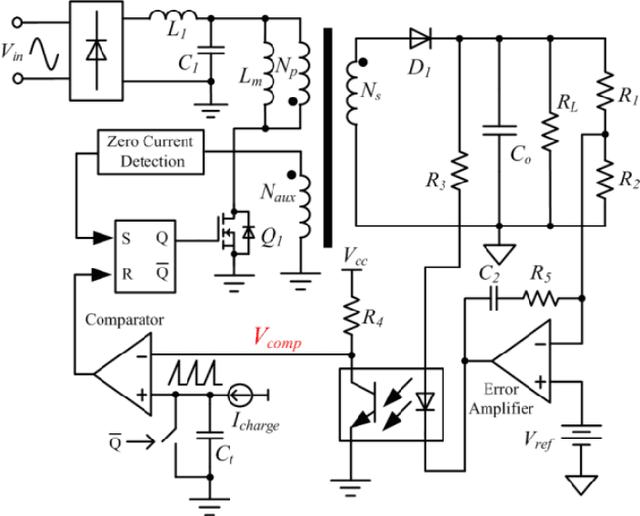
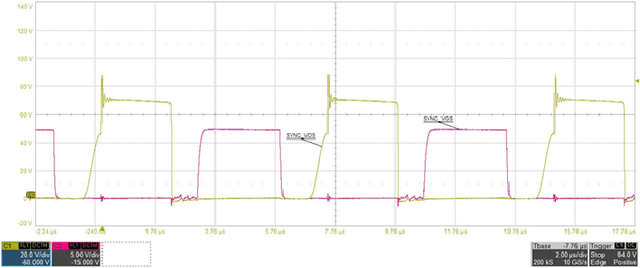
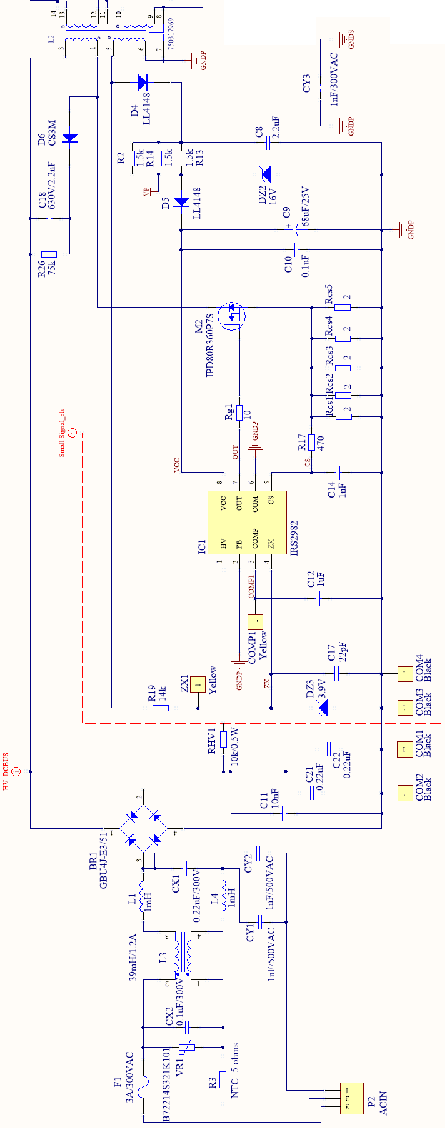
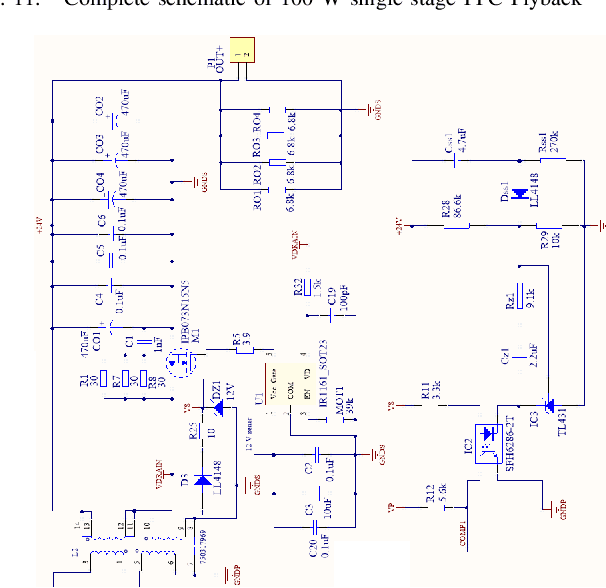
This paper discusses a 100 W single stage Power Factor Correction (PFC) flyback converter operating in boundary mode constant ON time methodology using a synchronous MOS-FET rectifier on the secondary side to achieve higher efficiency. Unlike conventional designs which use two stage approach such as PFC plus a LLC resonant stage or a two stage PFC plus flyback, the proposed design integrates the PFC and constant voltage regulation in a single stage without compromising the efficiency of the converter. The proposed design is advantageous as it has a lower component count. A design of 100 W flyback operating from universal input AC line voltage is demonstrated in this paper. The experimental results show that the power factor (PF) is greater than 0.92 and total harmonic distortion (iTHD) is less than 20% for a load varying from 25 % to 100 %. The experimental results show the advantages of a single stage design.