 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
The EOS Decision and Length Extrapolation
Oct 14, 2020
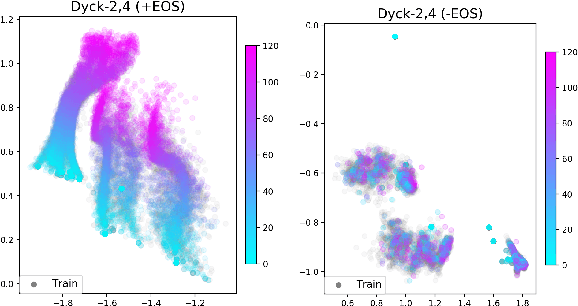
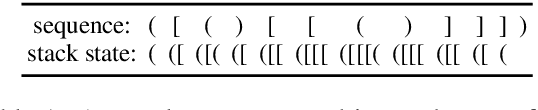
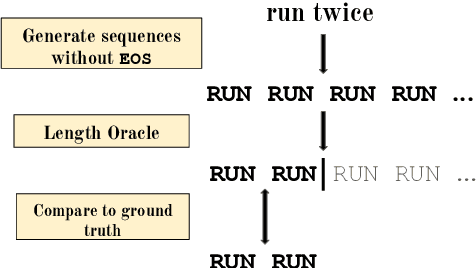
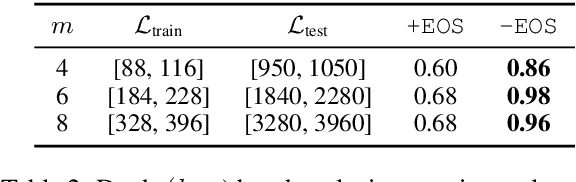
Extrapolation to unseen sequence lengths is a challenge for neural generative models of language. In this work, we characterize the effect on length extrapolation of a modeling decision often overlooked: predicting the end of the generative process through the use of a special end-of-sequence (EOS) vocabulary item. We study an oracle setting - forcing models to generate to the correct sequence length at test time - to compare the length-extrapolative behavior of networks trained to predict EOS (+EOS) with networks not trained to (-EOS). We find that -EOS substantially outperforms +EOS, for example extrapolating well to lengths 10 times longer than those seen at training time in a bracket closing task, as well as achieving a 40% improvement over +EOS in the difficult SCAN dataset length generalization task. By comparing the hidden states and dynamics of -EOS and +EOS models, we observe that +EOS models fail to generalize because they (1) unnecessarily stratify their hidden states by their linear position is a sequence (structures we call length manifolds) or (2) get stuck in clusters (which we refer to as length attractors) once the EOS token is the highest-probability prediction.
Artificial Neural Networks for Sensor Data Classification on Small Embedded Systems
Dec 15, 2020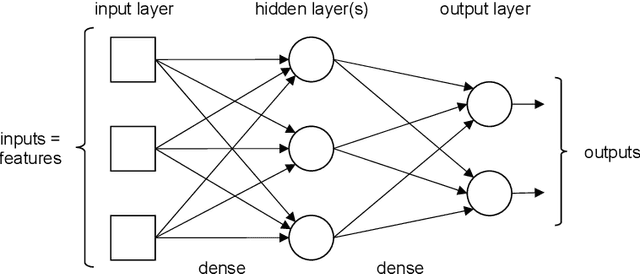
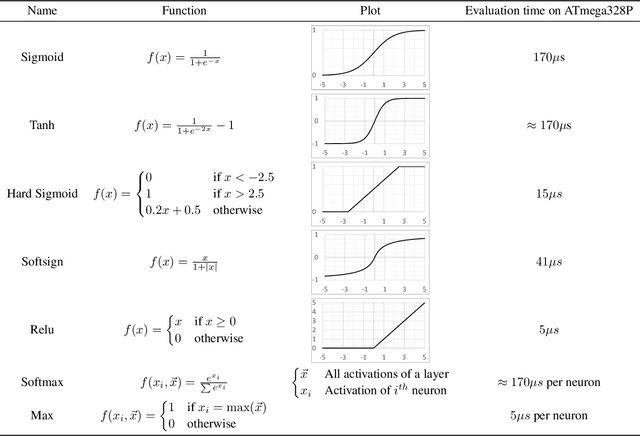
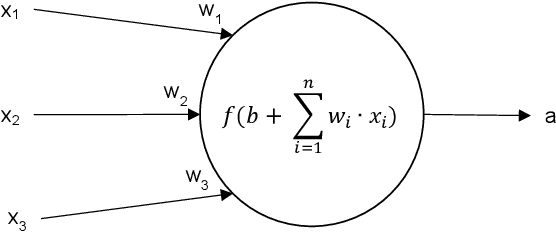

In this paper we investigate the usage of machine learning for interpreting measured sensor values in sensor modules. In particular we analyze the potential of artificial neural networks (ANNs) on low-cost micro-controllers with a few kilobytes of memory to semantically enrich data captured by sensors. The focus is on classifying temporal data series with a high level of reliability. Design and implementation of ANNs are analyzed considering Feed Forward Neural Networks (FFNNs) and Recurrent Neural Networks (RNNs). We validate the developed ANNs in a case study of optical hand gesture recognition on an 8-bit micro-controller. The best reliability was found for an FFNN with two layers and 1493 parameters requiring an execution time of 36 ms. We propose a workflow to develop ANNs for embedded devices.
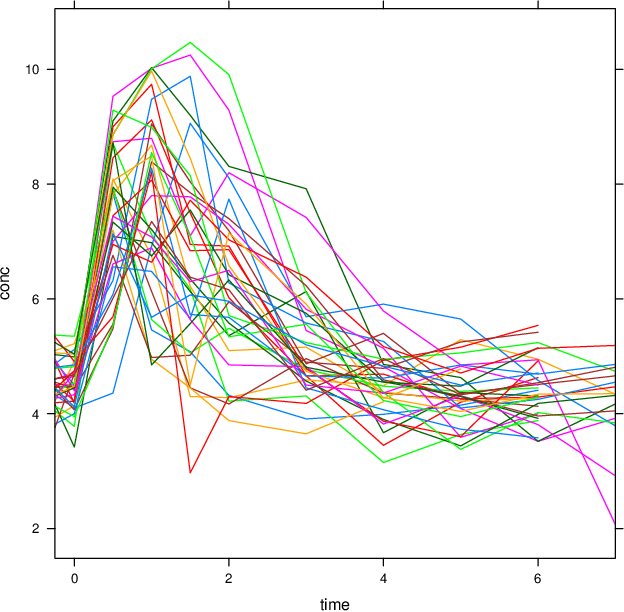
Data-driven detrending of nonstationary fractal time series with echo state networks
Oct 03, 2016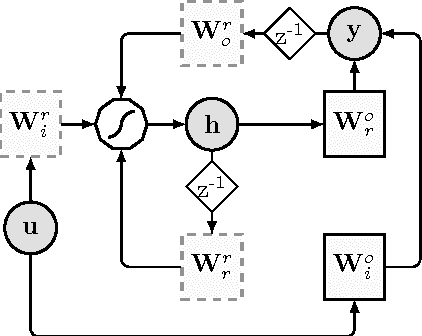
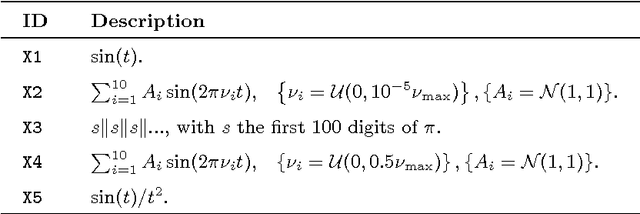
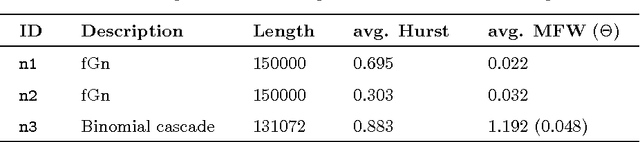
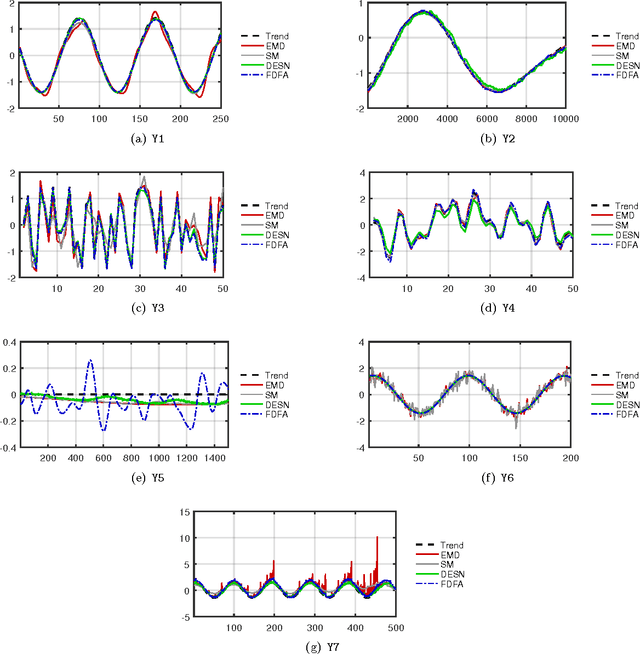
In this paper, we propose a novel data-driven approach for removing trends (detrending) from nonstationary, fractal and multifractal time series. We consider real-valued time series relative to measurements of an underlying dynamical system that evolves through time. We assume that such a dynamical process is predictable to a certain degree by means of a class of recurrent networks called Echo State Network (ESN), which are capable to model a generic dynamical process. In order to isolate the superimposed (multi)fractal component of interest, we define a data-driven filter by leveraging on the ESN prediction capability to identify the trend component of a given input time series. Specifically, the (estimated) trend is removed from the original time series and the residual signal is analyzed with the multifractal detrended fluctuation analysis procedure to verify the correctness of the detrending procedure. In order to demonstrate the effectiveness of the proposed technique, we consider several synthetic time series consisting of different types of trends and fractal noise components with known characteristics. We also process a real-world dataset, the sunspot time series, which is well-known for its multifractal features and has recently gained attention in the complex systems field. Results demonstrate the validity and generality of the proposed detrending method based on ESNs.
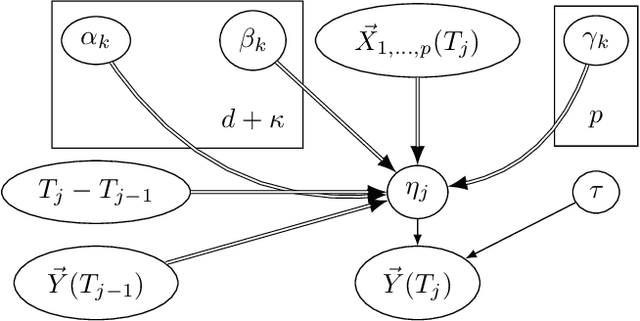
Modeling and Predicting Trust Dynamics in Human-Robot Teaming: A Bayesian Inference Approach
Jul 26, 2020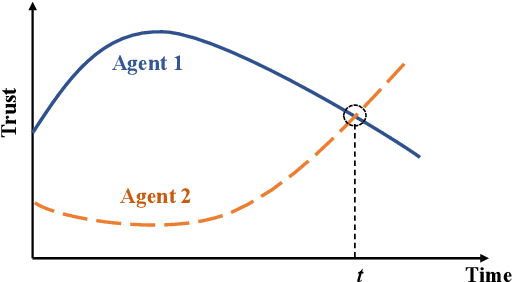
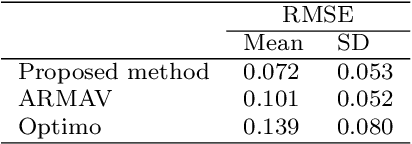
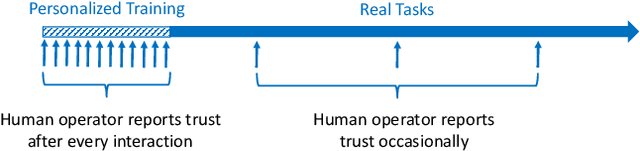
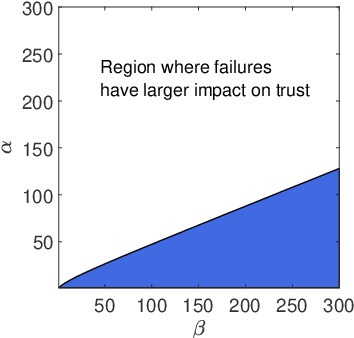
Trust in automation, or more recently trust in autonomy, has received extensive research attention in the past two decades. The majority of prior literature adopted a ``snapshot" view of trust and typically evaluated trust through questionnaires administered at the end of an experiment. This "snapshot" view, however, does not acknowledge that trust is a time-variant variable that can strengthen or decay over time. To fill the research gap, the present study aims to model trust dynamics when a human interacts with a robotic agent over time. The underlying premise of the study is that by interacting with a robotic agent and observing its performance over time, a rational human agent will update his/her trust in the robotic agent accordingly. Based on this premise, we develop a personalized trust prediction model based on Beta distribution and learn its parameters using Bayesian inference. Our proposed model adheres to three major properties of trust dynamics reported in prior empirical studies. We tested the proposed method using an existing dataset involving 39 human participants interacting with four drones in a simulated surveillance mission. The proposed method obtained a Root Mean Square Error (RMSE) of 0.072, significantly outperforming existing prediction methods. Moreover, we identified three distinctive types of trust dynamics, the Bayesian decision maker, the oscillator, and the disbeliever, respectively. This prediction model can be used for the design of individualized and adaptive technologies.
Braille to Text Translation for Bengali Language: A Geometric Approach
Dec 02, 2020
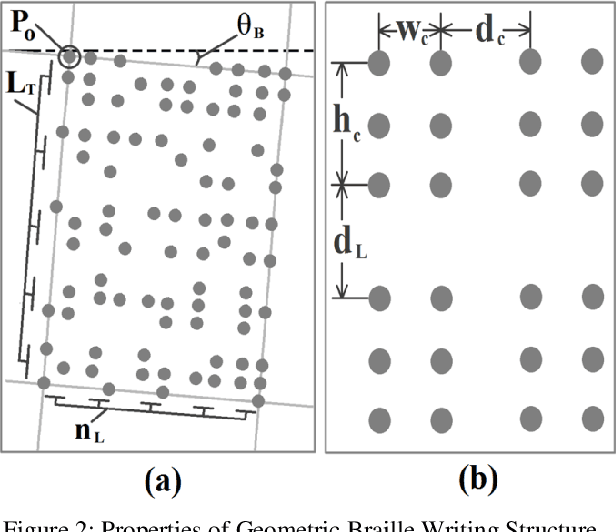
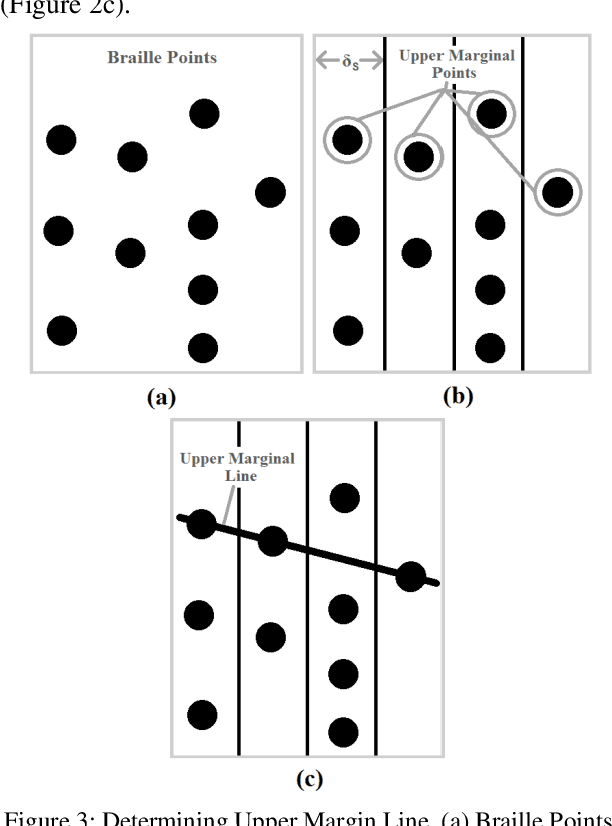
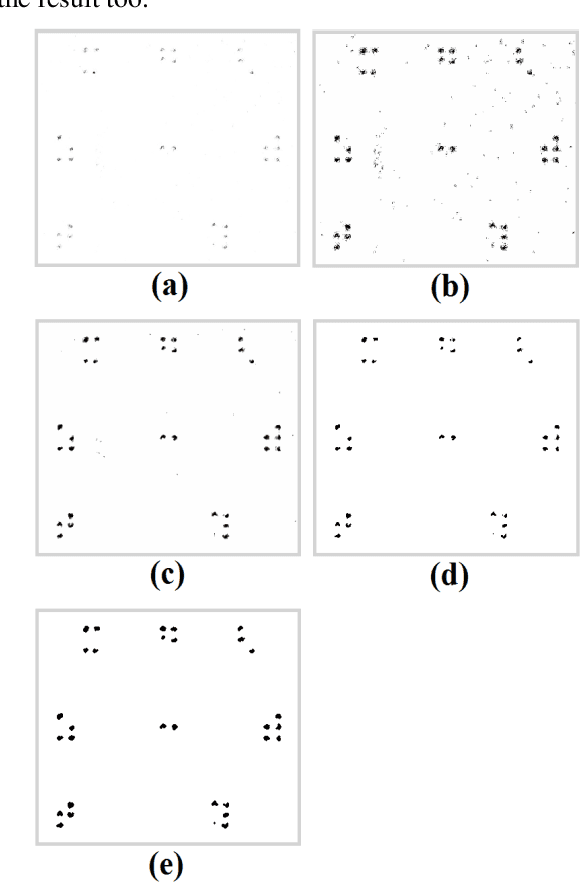
Braille is the only system to visually impaired people for reading and writing. However, general people cannot read Braille. So, teachers and relatives find it hard to assist them with learning. Almost every major language has software solutions for this translation purpose. However, in Bengali there is an absence of this useful tool. Here, we propose Braille to Text Translator, which takes image of these tactile alphabets, and translates them to plain text. Image deterioration, scan-time page rotation, and braille dot deformation are the principal issues in this scheme. All of these challenges are directly checked using special image processing and geometric structure analysis. The technique yields 97.25% accuracy in recognizing Braille characters.
Irregular-Time Bayesian Networks
Mar 15, 2012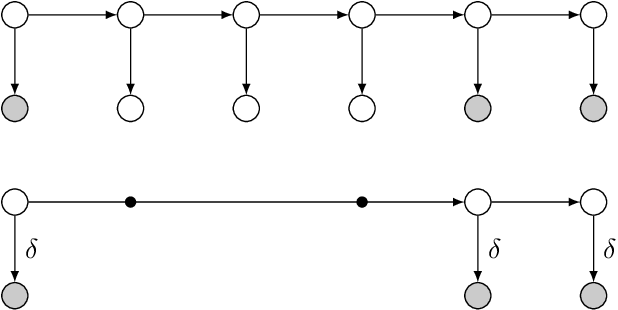
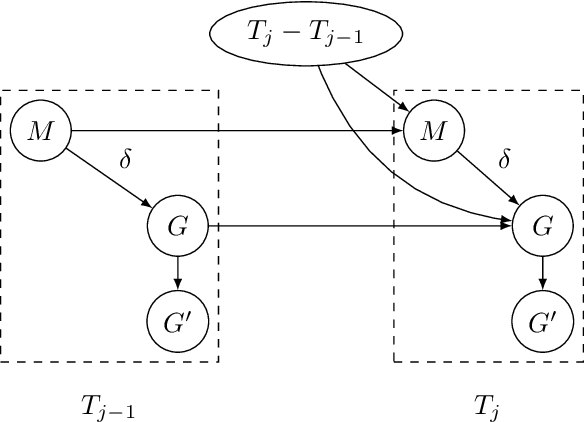
In many fields observations are performed irregularly along time, due to either measurement limitations or lack of a constant immanent rate. While discrete-time Markov models (as Dynamic Bayesian Networks) introduce either inefficient computation or an information loss to reasoning about such processes, continuous-time Markov models assume either a discrete state space (as Continuous-Time Bayesian Networks), or a flat continuous state space (as stochastic differential equations). To address these problems, we present a new modeling class called Irregular-Time Bayesian Networks (ITBNs), generalizing Dynamic Bayesian Networks, allowing substantially more compact representations, and increasing the expressivity of the temporal dynamics. In addition, a globally optimal solution is guaranteed when learning temporal systems, provided that they are fully observed at the same irregularly spaced time-points, and a semiparametric subclass of ITBNs is introduced to allow further adaptation to the irregular nature of the available data.
Fast Adaptation of Manipulator Trajectories to Task Perturbation By Differentiating through the Optimal Solution
Nov 01, 2020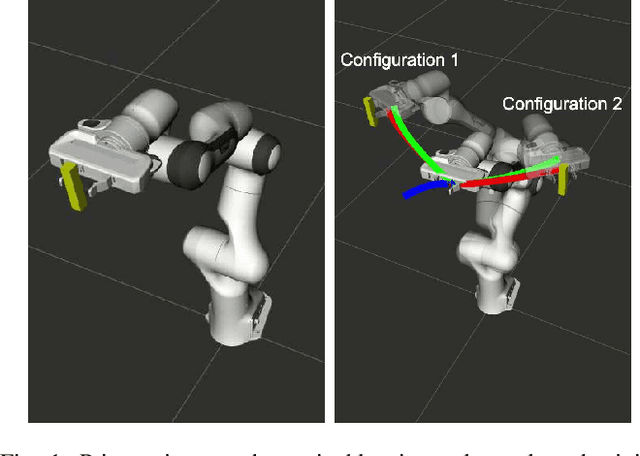
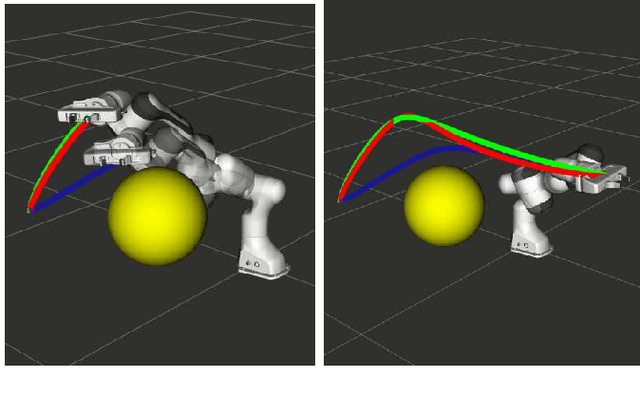
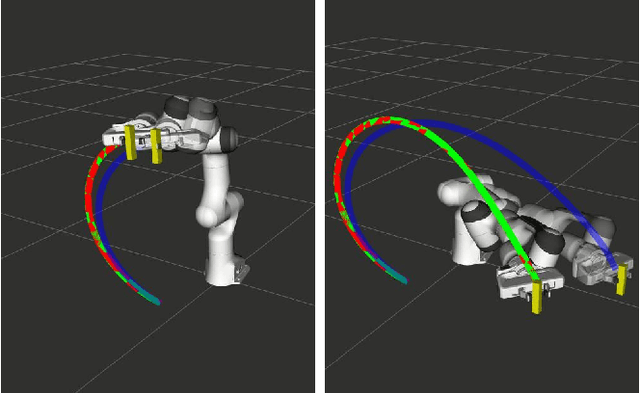
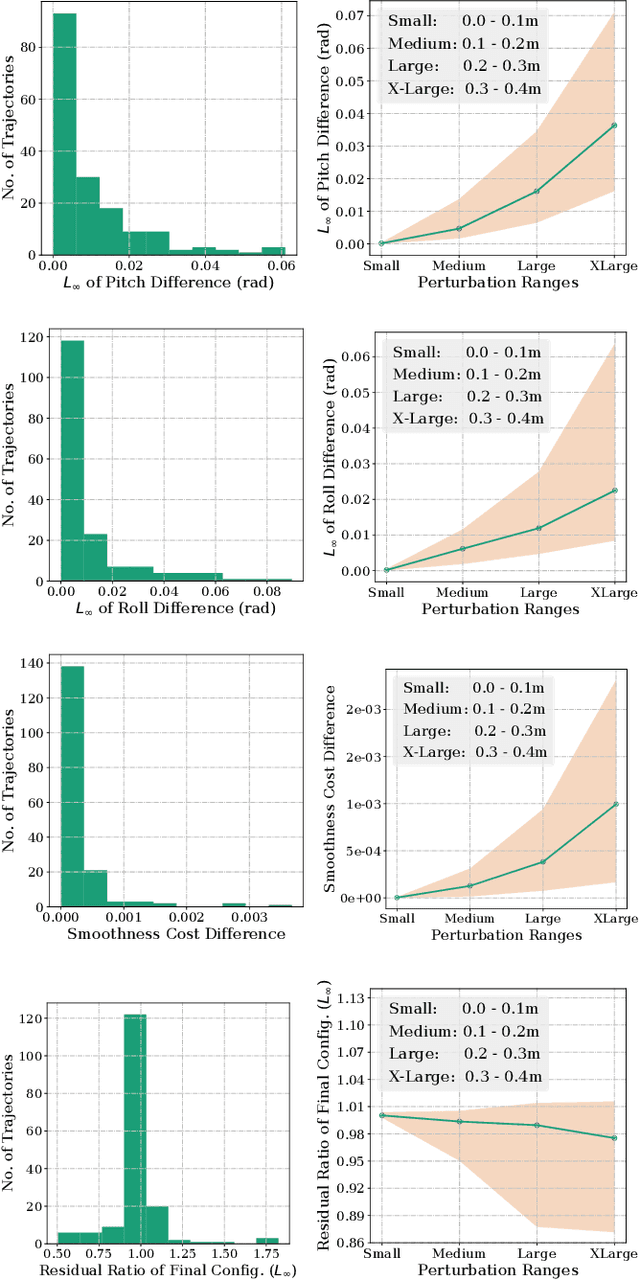
Joint space trajectory optimization under end-effector task constraints leads to a challenging non-convex problem. Thus, a real-time adaptation of prior computed trajectories to perturbation in task constraints often becomes intractable. Existing works use the so-called warm-starting of trajectory optimization to improve computational performance. We present a fundamentally different approach that relies on deriving analytical gradients of the optimal solution with respect to the task constraint parameters. This gradient map characterizes the direction in which the prior computed joint trajectories need to be deformed to comply with the new task constraints. Subsequently, we develop an iterative line-search algorithm for computing the scale of deformation. Our algorithm provides near real-time adaptation of joint trajectories for a diverse class of task perturbations such as (i) changes in initial and final joint configurations of end-effector orientation-constrained trajectories and (ii) changes in end-effector goal or way-points under end-effector orientation constraints. We relate each of these examples to real-world applications ranging from learning from demonstration to obstacle avoidance. We also show that our algorithm produces trajectories with quality similar to what one would obtain by solving the trajectory optimization from scratch with warm-start initialization. But most importantly, our algorithm achieves a worst-case speed-up of 160x over the latter approach.
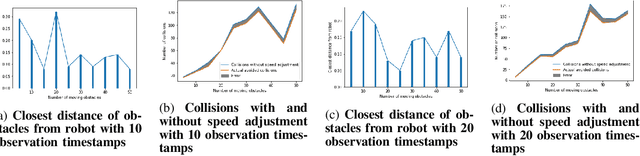
Machine Learning for Cataract Classification and Grading on Ophthalmic Imaging Modalities: A Survey
Dec 09, 2020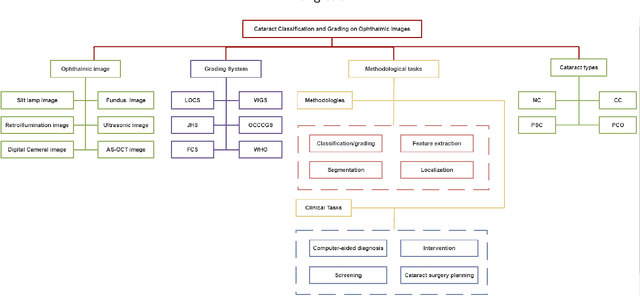
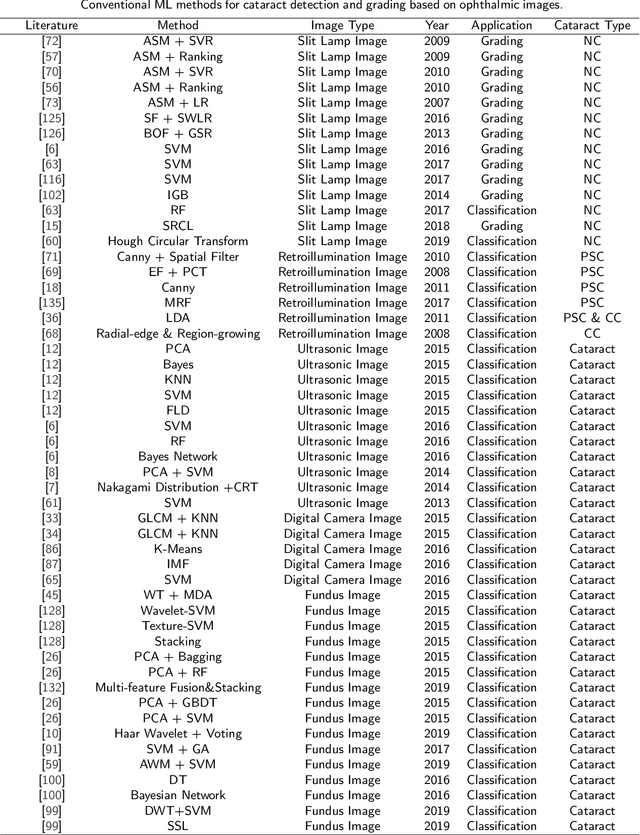

Cataract is one of the leading causes of reversible visual impairment and blindness globally. Over the years, researchers have achieved significant progress in developing state-of-the-art artificial intelligence techniques for automatic cataract classification and grading, helping clinicians prevent and treat cataract in time. This paper provides a comprehensive survey of recent advances in machine learning for cataract classification and grading based on ophthalmic images. We summarize existing literature from two research directions: conventional machine learning techniques and deep learning techniques. This paper also provides insights into existing works of both merits and limitations. In addition, we discuss several challenges of automatic cataract classification and grading based on machine learning techniques and present possible solutions to these challenges for future research.
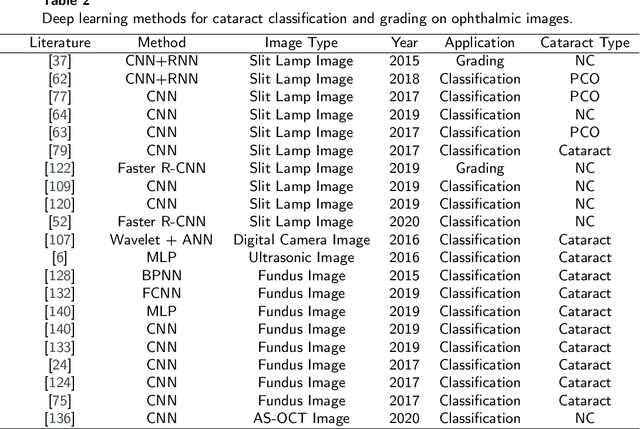
Predictive Probability Path Planning Model For Dynamic Environments
Jul 29, 2020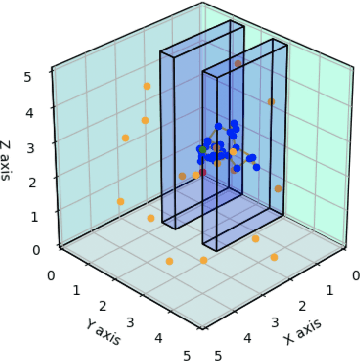
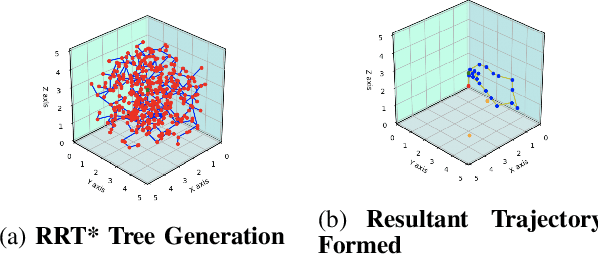
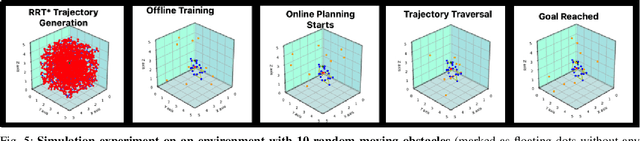
Path planning in dynamic environments is essential to high-risk applications such as unmanned aerial vehicles, self-driving cars, and autonomous underwater vehicles. In this paper, we generate collision-free trajectories for a robot within any given environment with temporal and spatial uncertainties caused due to randomly moving obstacles. We use two Poisson distributions to model the movements of obstacles across the generated trajectory of a robot in both space and time to determine the probability of collision with an obstacle. Measures are taken to avoid an obstacle by intelligently manipulating the speed of the robot at space-time intervals where a larger number of obstacles intersect the trajectory of the robot. Our method potentially reduces the use of computationally expensive collision detection libraries. Based on our experiments, there has been a significant improvement over existing methods in terms of safety, accuracy, execution time and computational cost. Our results show a high level of accuracy between the predicted and actual number of collisions with moving obstacles.
Triclustering in Big Data Setting
Oct 24, 2020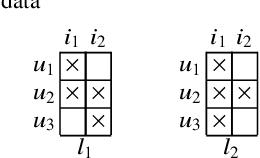
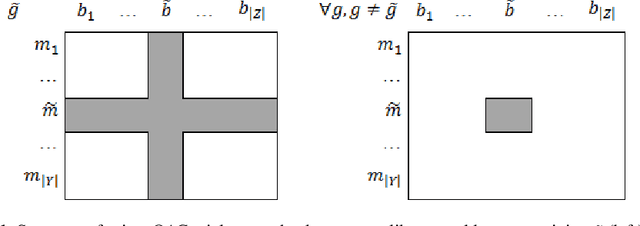
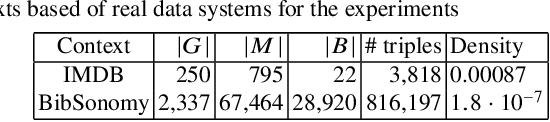
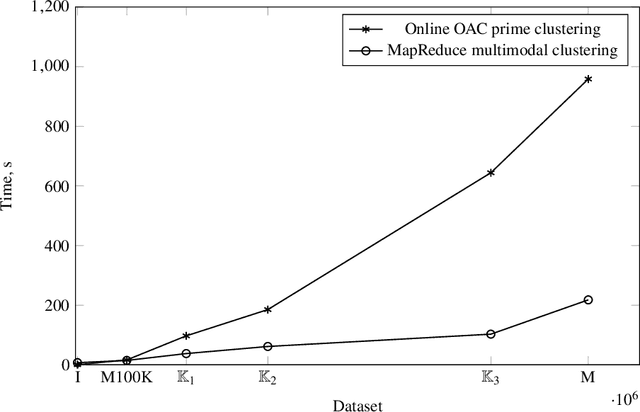
In this paper, we describe versions of triclustering algorithms adapted for efficient calculations in distributed environments with MapReduce model or parallelisation mechanism provided by modern programming languages. OAC-family of triclustering algorithms shows good parallelisation capabilities due to the independent processing of triples of a triadic formal context. We provide the time and space complexity of the algorithms and justify their relevance. We also compare performance gain from using a distributed system and scalability.
* The paper contains an extended version of the prior work presented at the workshop on FCA in the Big Data Era held on June 25, 2019 at Frankfurt University of Applied Sciences, Frankfurt, Germany