 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Real-Time Visual Tracking and Identification for a Team of Homogeneous Humanoid Robots
Oct 16, 2018
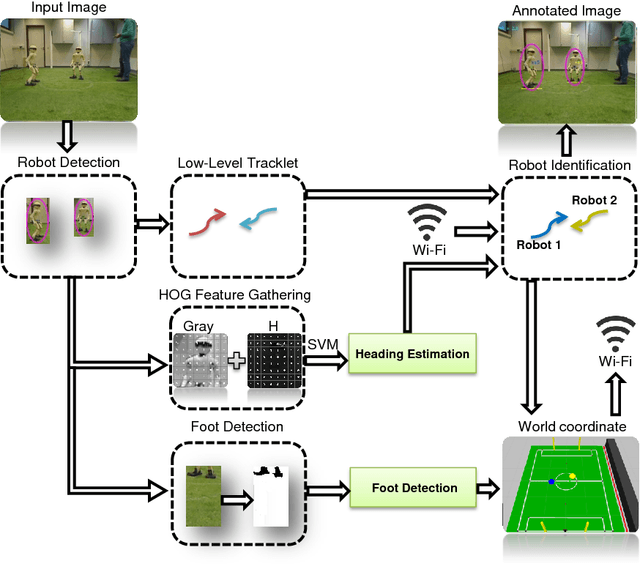
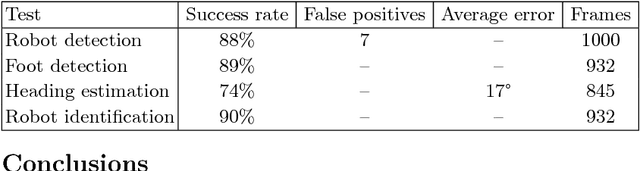

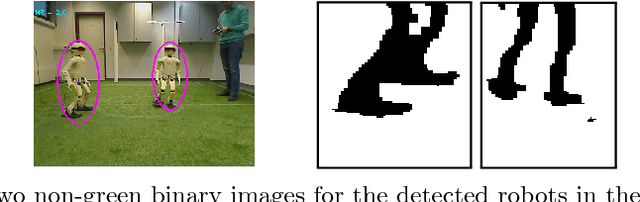
The use of a team of humanoid robots to collaborate in completing a task is an increasingly important field of research. One of the challenges in achieving collaboration, is mutual identification and tracking of the robots. This work presents a real-time vision-based approach to the detection and tracking of robots of known appearance, based on the images captured by a stationary robot. A Histogram of Oriented Gradients descriptor is used to detect the robots and the robot headings are estimated by a multiclass classifier. The tracked robots report their own heading estimate from magnetometer readings. For tracking, a cost function based on position and heading is applied to each of the tracklets, and a globally optimal labeling of the detected robots is found using the Hungarian algorithm. The complete identification and tracking system was tested using two igus Humanoid Open Platform robots on a soccer field. We expect that a similar system can be used with other humanoid robots, such as Nao and DARwIn-OP
* 20th RoboCup International Symposium, Leipzig, Germany, 2016
Compressed Shaping: Concept and FPGA Demonstration
Feb 08, 2021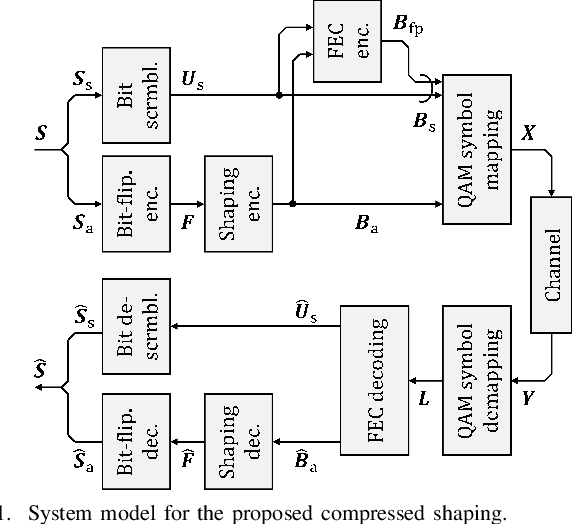
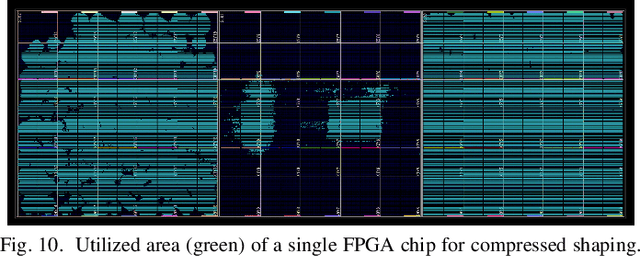
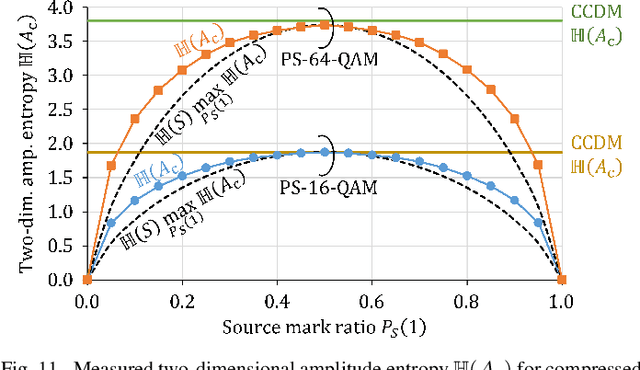
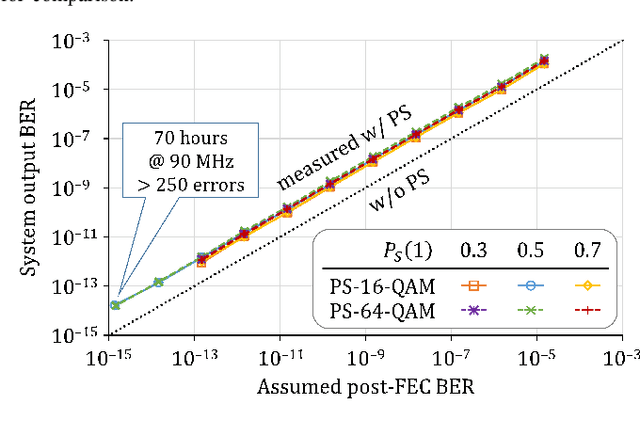
Probabilistic shaping (PS) has been widely studied and applied to optical fiber communications. The encoder of PS expends the number of bit slots and controls the probability distribution of channel input symbols. Not only studies focused on PS but also most works on optical fiber communications have assumed source uniformity (i.e. equal probability of marks and spaces) so far. On the other hand, the source information is in general nonuniform, unless bit-scrambling or other source coding techniques to balance the bit probability is performed. Interestingly,one can exploit the source nonuniformity to reduce the entropy of the channel input symbols with the PS encoder, which leads to smaller required signal-to-noise ratio at a given input logic rate. This benefit is equivalent to a combination of data compression and PS, and thus we call this technique compressed shaping. In this work, we explain its theoretical background in detail, and verify the concept by both numerical simulation and a field programmable gate array (FPGA) implementation of such a system. In particular, we find that compressed shaping can reduce power consumption in forward error correction decoding by up to 90% in nonuniform source cases. The additional hardware resources required for compressed shaping are not significant compared with forward error correction coding, and a real-time back-to-back test is successfully demonstrated.
Challenges of Applying Deep Reinforcement Learning in Dynamic Dispatching
Nov 09, 2020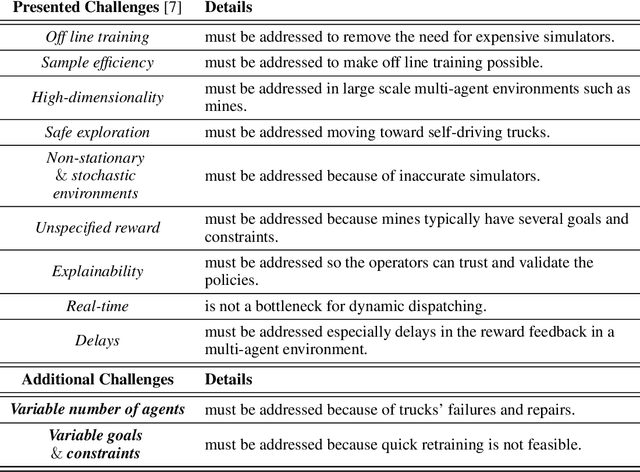
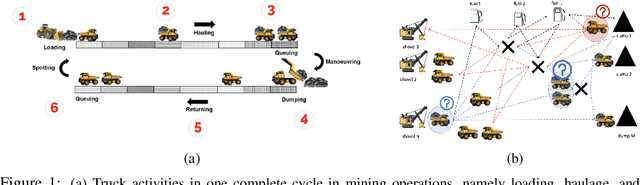
Dynamic dispatching aims to smartly allocate the right resources to the right place at the right time. Dynamic dispatching is one of the core problems for operations optimization in the mining industry. Theoretically, deep reinforcement learning (RL) should be a natural fit to solve this problem. However, the industry relies on heuristics or even human intuitions, which are often short-sighted and sub-optimal solutions. In this paper, we review the main challenges in using deep RL to address the dynamic dispatching problem in the mining industry.
Anomaly Detection in Multivariate Non-stationary Time Series for Automatic DBMS Diagnosis
Oct 09, 2017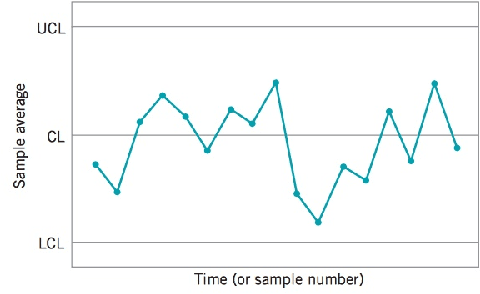
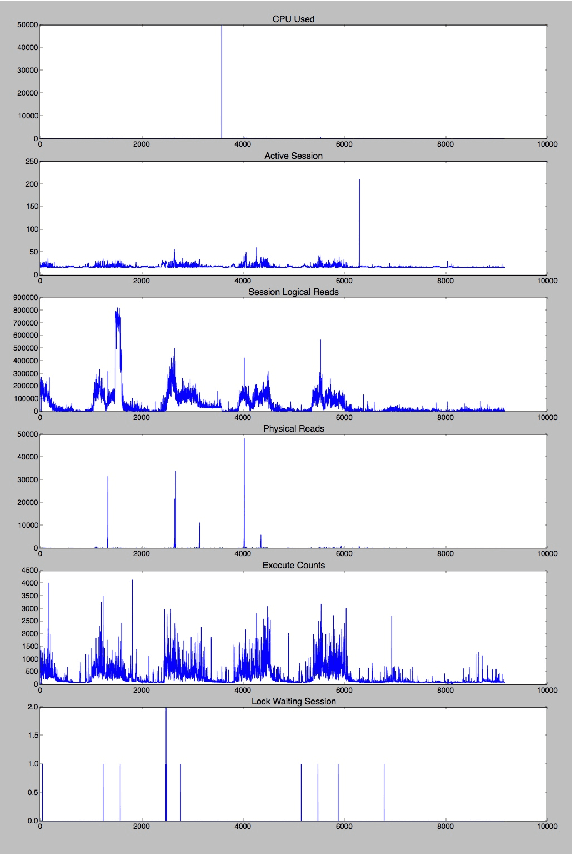
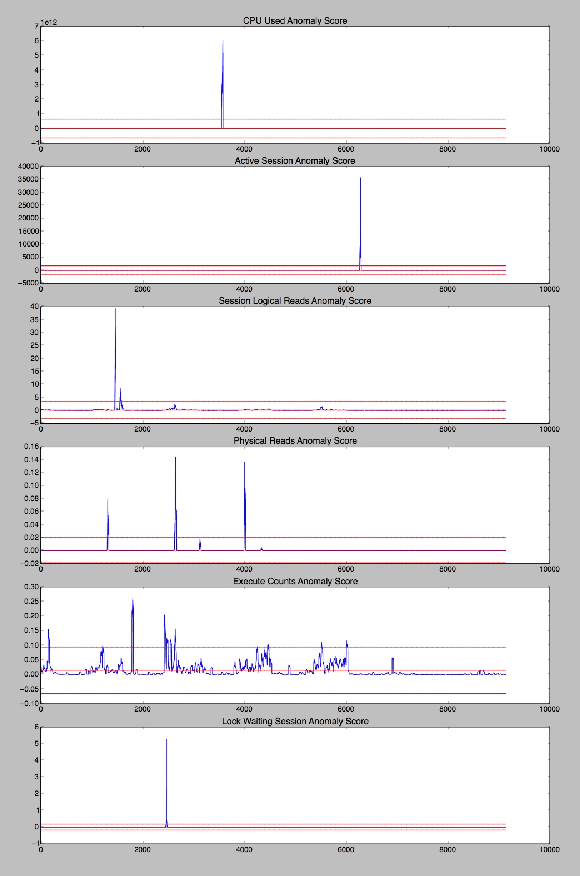
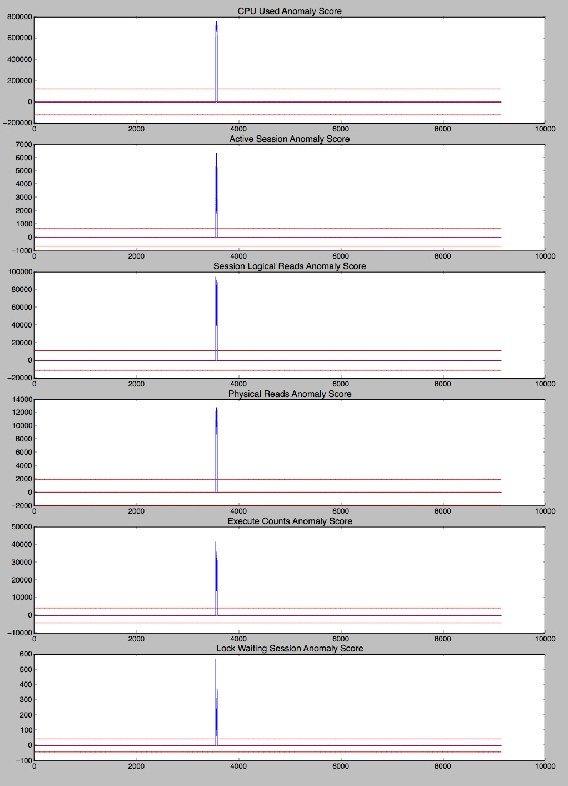
Anomaly detection in database management systems (DBMSs) is difficult because of increasing number of statistics (stat) and event metrics in big data system. In this paper, I propose an automatic DBMS diagnosis system that detects anomaly periods with abnormal DB stat metrics and finds causal events in the periods. Reconstruction error from deep autoencoder and statistical process control approach are applied to detect time period with anomalies. Related events are found using time series similarity measures between events and abnormal stat metrics. After training deep autoencoder with DBMS metric data, efficacy of anomaly detection is investigated from other DBMSs containing anomalies. Experiment results show effectiveness of proposed model, especially, batch temporal normalization layer. Proposed model is used for publishing automatic DBMS diagnosis reports in order to determine DBMS configuration and SQL tuning.
Physics-aware deep neural networks for surrogate modeling of turbulent natural convection
Mar 05, 2021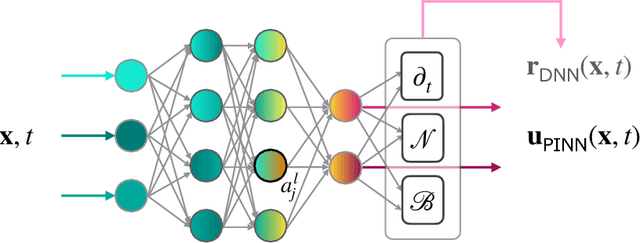
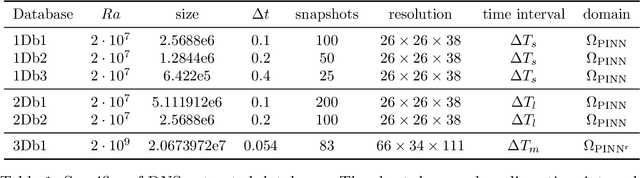
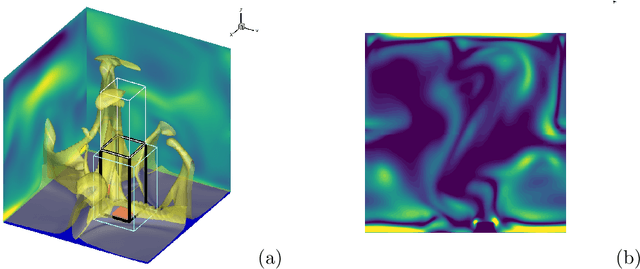
Recent works have explored the potential of machine learning as data-driven turbulence closures for RANS and LES techniques. Beyond these advances, the high expressivity and agility of physics-informed neural networks (PINNs) make them promising candidates for full fluid flow PDE modeling. An important question is whether this new paradigm, exempt from the traditional notion of discretization of the underlying operators very much connected to the flow scales resolution, is capable of sustaining high levels of turbulence characterized by multi-scale features? We investigate the use of PINNs surrogate modeling for turbulent Rayleigh-B{\'e}nard (RB) convection flows in rough and smooth rectangular cavities, mainly relying on DNS temperature data from the fluid bulk. We carefully quantify the computational requirements under which the formulation is capable of accurately recovering the flow hidden quantities. We then propose a new padding technique to distribute some of the scattered coordinates-at which PDE residuals are minimized-around the region of labeled data acquisition. We show how it comes to play as a regularization close to the training boundaries which are zones of poor accuracy for standard PINNs and results in a noticeable global accuracy improvement at iso-budget. Finally, we propose for the first time to relax the incompressibility condition in such a way that it drastically benefits the optimization search and results in a much improved convergence of the composite loss function. The RB results obtained at high Rayleigh number Ra = 2 $\bullet$ 10 9 are particularly impressive: the predictive accuracy of the surrogate over the entire half a billion DNS coordinates yields errors for all flow variables ranging between [0.3% -- 4%] in the relative L 2 norm, with a training relying only on 1.6% of the DNS data points.
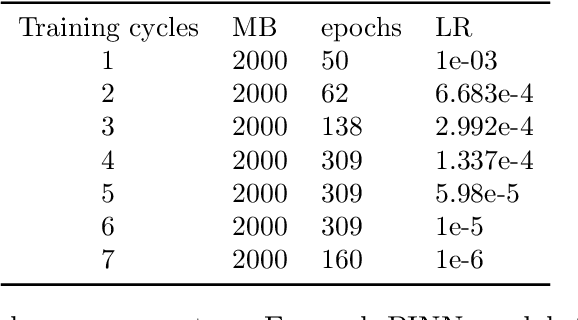
Object sorting using faster R-CNN
Dec 29, 2020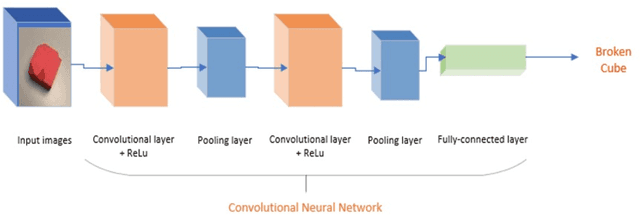
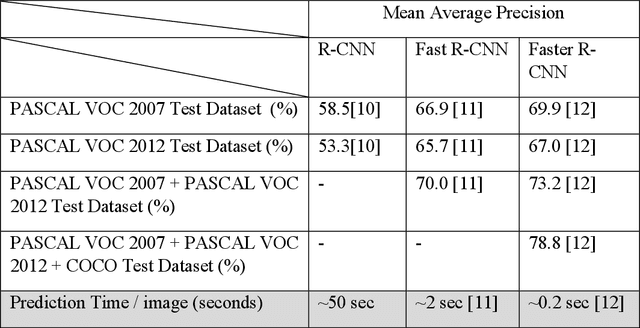
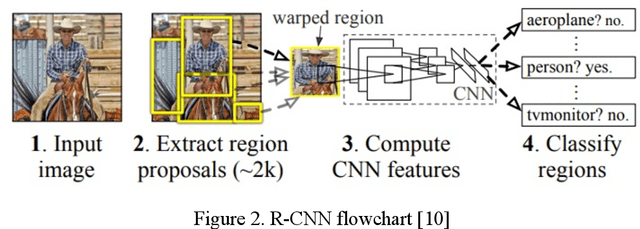
In a factory production line, different industry parts need to be quickly differentiated and sorted for further process. Parts can be of different colors and shapes. It is tedious for humans to differentiate and sort these objects in appropriate categories. Automating this process would save more time and cost. In the automation process, choosing an appropriate model to detect and classify different objects based on specific features is more challenging. In this paper, three different neural network models are compared to the object sorting system. They are namely CNN, Fast R-CNN, and Faster R-CNN. These models are tested, and their performance is analyzed. Moreover, for the object sorting system, an Arduino-controlled 5 DoF (degree of freedom) robot arm is programmed to grab and drop symmetrical objects to the targeted zone. Objects are categorized into classes based on color, defective and non-defective objects.
* 10 pages, 10 figures, 5 tables
Towards Social & Engaging Peer Learning: Predicting Backchanneling and Disengagement in Children
Jul 22, 2020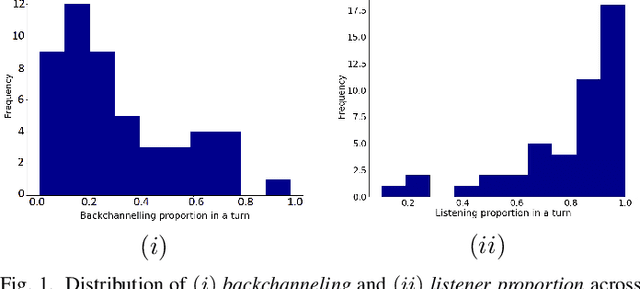
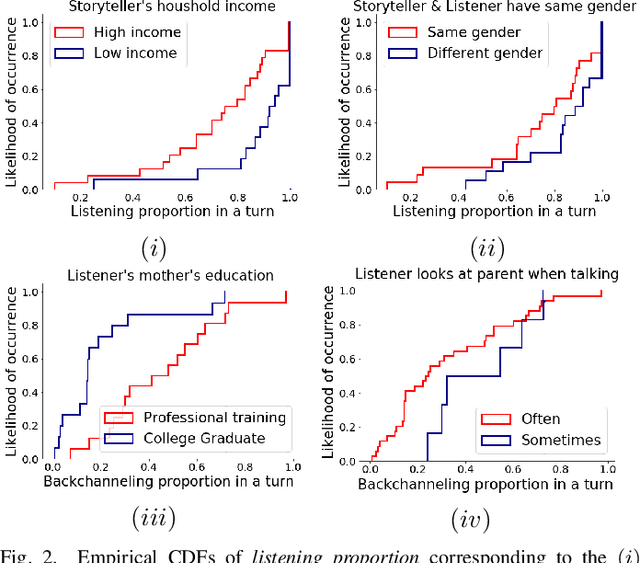
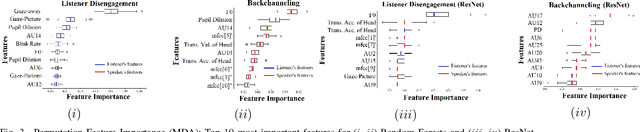
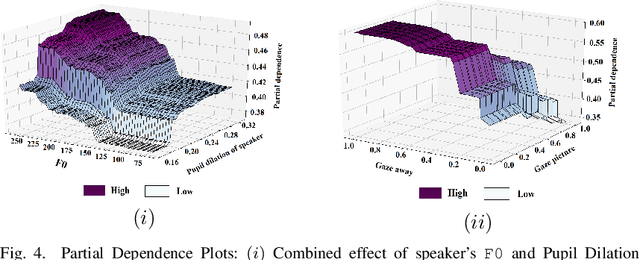
Social robots and interactive computer applications have the potential to foster early language development in young children by acting as peer learning companions. However, studies have found that children only trust robots which behave in a natural and interpersonal manner. To help robots come across as engaging and attentive peer learning companions, we develop models to predict whether the listener will lose attention (Listener Disengagement Prediction, LDP) and the extent to which a robot should generate backchanneling responses (Backchanneling Extent Prediction, BEP) in the next few seconds. We pose LDP and BEP as time series classification problems and conduct several experiments to assess the impact of different time series characteristics and feature sets on the predictive performance of our model. Using statistics & machine learning, we also examine which socio-demographic factors influence the amount of time children spend backchanneling and listening to their peers. To lend interpretability to our models, we also analyzed critical features responsible for their predictive performance. Our experiments revealed the utility of multimodal features such as pupil dilation, blink rate, head movements, facial action units which have never been used before. We also found that the dynamics of time series features are rich predictors of listener disengagement and backchanneling.
Algorithmic Complexities in Backpropagation and Tropical Neural Networks
Jan 03, 2021In this note, we propose a novel technique to reduce the algorithmic complexity of neural network training by using matrices of tropical real numbers instead of matrices of real numbers. Since the tropical arithmetics replaces multiplication with addition, and addition with max, we theoretically achieve several order of magnitude better constant factors in time complexities in the training phase. The fact that we replace the field of real numbers with the tropical semiring of real numbers and yet achieve the same classification results via neural networks come from deep results in topology and analysis, which we verify in our note. We then explore artificial neural networks in terms of tropical arithmetics and tropical algebraic geometry, and introduce the multi-layered tropical neural networks as universal approximators. After giving a tropical reformulation of the backpropagation algorithm, we verify the algorithmic complexity is substantially lower than the usual backpropagation as the tropical arithmetic is free of the complexity of usual multiplication.
Correlating grip force signals from multiple sensors highlights prehensile control strategies in a complex task-user system
Nov 12, 2020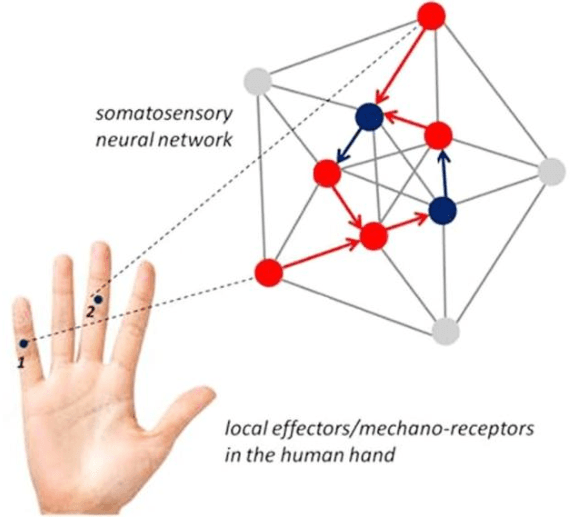
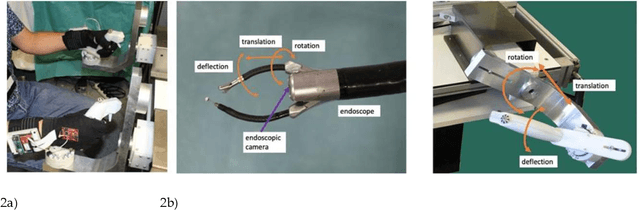
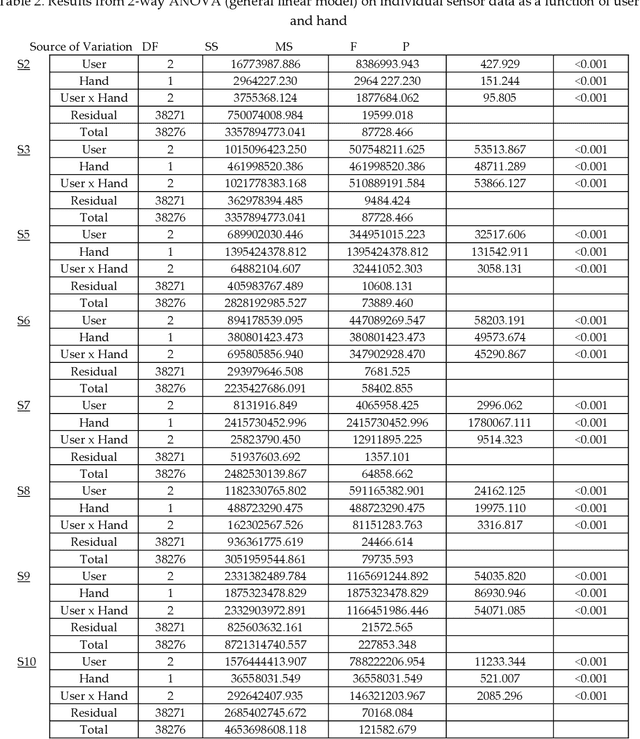
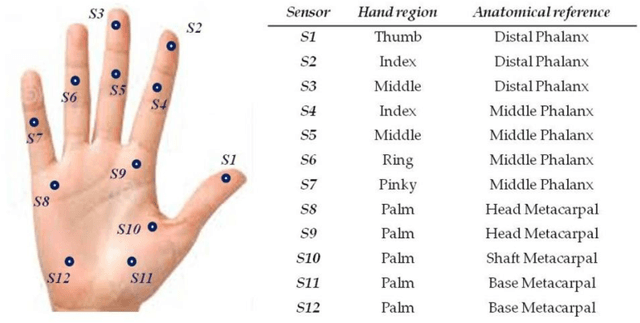
Wearable sensor systems with transmitting capabilities are currently employed for the biometric screening of exercise activities and other performance data. Such technology is generally wireless and enables the noninvasive monitoring of signals to track and trace user behaviors in real time. Examples include signals relative to hand and finger movements or force control reflected by individual grip force data. As will be shown here, these signals directly translate into task, skill, and hand specific, dominant versus non dominant hand, grip force profiles for different measurement loci in the fingers and palm of the hand. The present study draws from thousands of such sensor data recorded from multiple spatial locations. The individual grip force profiles of a highly proficient left handed exper, a right handed dominant hand trained user, and a right handed novice performing an image guided, robot assisted precision task with the dominant or the non dominant hand are analyzed. The step by step statistical approach follows Tukeys detective work principle, guided by explicit functional assumptions relating to somatosensory receptive field organization in the human brain. Correlation analyses in terms of Person Product Moments reveal skill specific differences in covariation patterns in the individual grip force profiles. These can be functionally mapped to from global to local coding principles in the brain networks that govern grip force control and its optimization with a specific task expertise. Implications for the real time monitoring of grip forces and performance training in complex task user systems are brought forward.
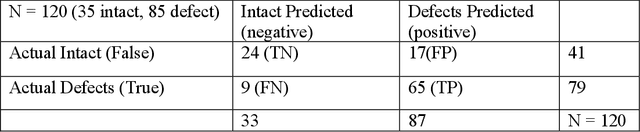
Automatic Defect Detection of Print Fabric Using Convolutional Neural Network
Jan 03, 2021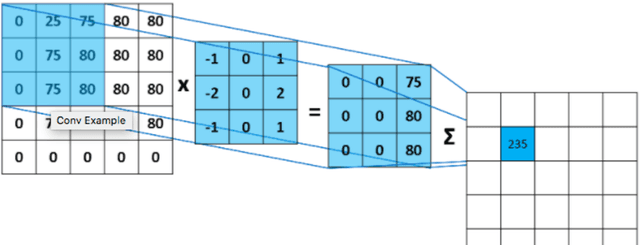
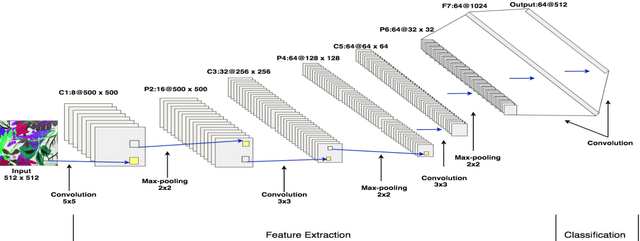
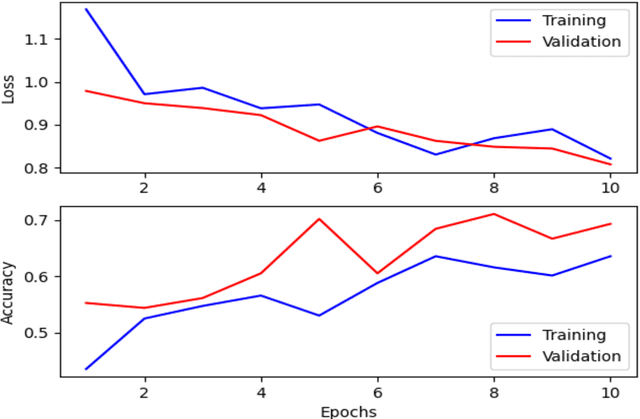
Automatic defect detection is a challenging task because of the variability in texture and type of fabric defects. An effective defect detection system enables manufacturers to improve the quality of processes and products. Automation across the textile manufacturing systems would reduce fabric wastage and increase profitability by saving cost and resources. There are different contemporary research on automatic defect detection systems using image processing and machine learning techniques. These techniques differ from each other based on the manufacturing processes and defect types. Researchers have also been able to establish real-time defect detection system during weaving. Although, there has been research on patterned fabric defect detection, these defects are related to weaving faults such as holes, and warp and weft defects. But, there has not been any research that is designed to detect defects that arise during such as spot and print mismatch. This research has fulfilled this gap by developing a print fabric database and implementing deep convolutional neural network (CNN).