 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
FedEval: A Benchmark System with a Comprehensive Evaluation Model for Federated Learning
Nov 19, 2020
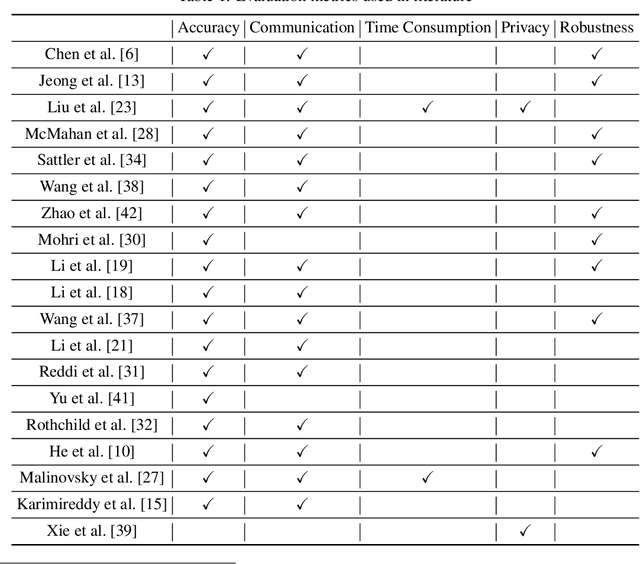
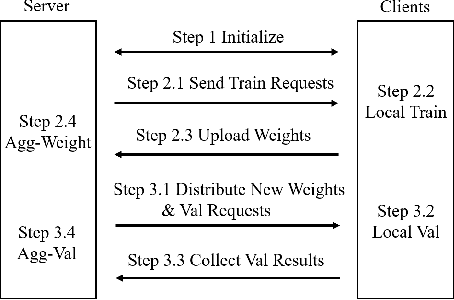
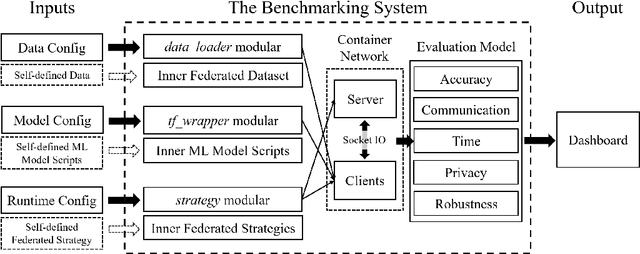
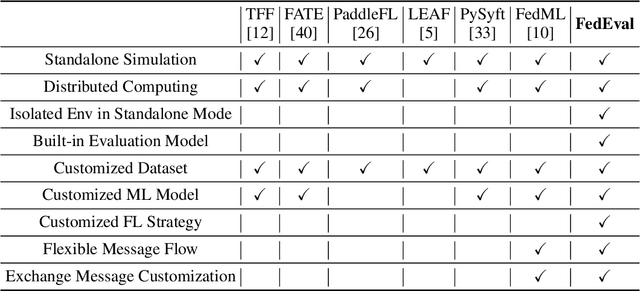
As an innovative solution for privacy-preserving machine learning (ML), federated learning (FL) is attracting much attention from research and industry areas. While new technologies proposed in the past few years do evolve the FL area, unfortunately, the evaluation results presented in these works fall short in integrity and are hardly comparable because of the inconsistent evaluation metrics and the lack of a common platform. In this paper, we propose a comprehensive evaluation framework for FL systems. Specifically, we first introduce the ACTPR model, which defines five metrics that cannot be excluded in FL evaluation, including Accuracy, Communication, Time efficiency, Privacy, and Robustness. Then we design and implement a benchmarking system called FedEval, which enables the systematic evaluation and comparison of existing works under consistent experimental conditions. We then provide an in-depth benchmarking study between the two most widely-used FL mechanisms, FedSGD and FedAvg. The benchmarking results show that FedSGD and FedAvg both have advantages and disadvantages under the ACTPR model. For example, FedSGD is barely influenced by the none independent and identically distributed (non-IID) data problem, but FedAvg suffers from a decline in accuracy of up to 9% in our experiments. On the other hand, FedAvg is more efficient than FedSGD regarding time consumption and communication. Lastly, we excavate a set of take-away conclusions, which are very helpful for researchers in the FL area.
HM4: Hidden Markov Model with Memory Management for Visual Place Recognition
Nov 01, 2020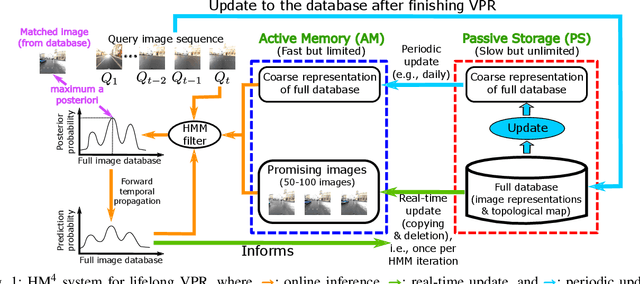
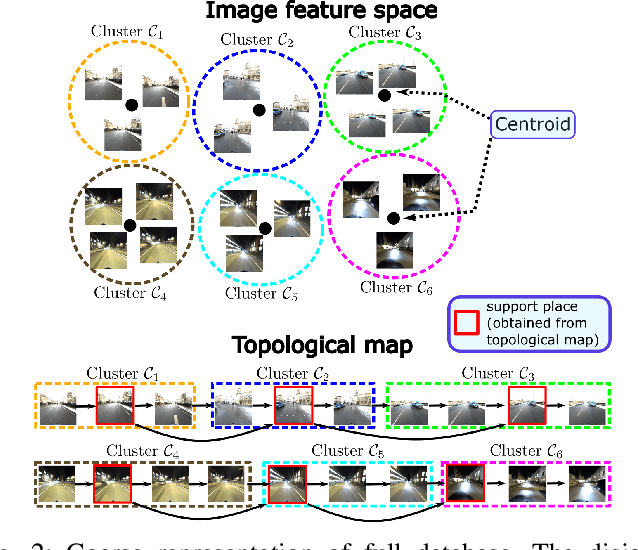
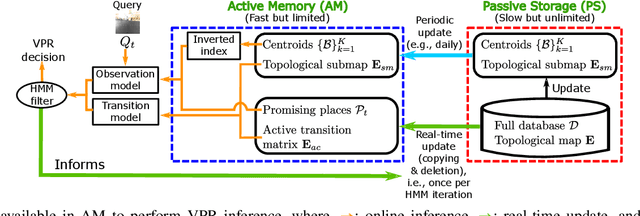
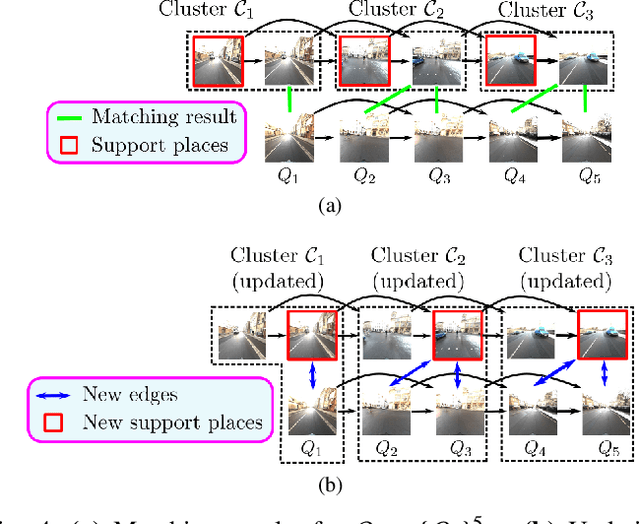
Visual place recognition needs to be robust against appearance variability due to natural and man-made causes. Training data collection should thus be an ongoing process to allow continuous appearance changes to be recorded. However, this creates an unboundedly-growing database that poses time and memory scalability challenges for place recognition methods. To tackle the scalability issue for visual place recognition in autonomous driving, we develop a Hidden Markov Model approach with a two-tiered memory management. Our algorithm, dubbed HM$^4$, exploits temporal look-ahead to transfer promising candidate images between passive storage and active memory when needed. The inference process takes into account both promising images and a coarse representations of the full database. We show that this allows constant time and space inference for a fixed coverage area. The coarse representations can also be updated incrementally to absorb new data. To further reduce the memory requirements, we derive a compact image representation inspired by Locality Sensitive Hashing (LSH). Through experiments on real world data, we demonstrate the excellent scalability and accuracy of the approach under appearance changes and provide comparisons against state-of-the-art techniques.
Scalable Robust Graph and Feature Extraction for Arbitrary Vessel Networks in Large Volumetric Datasets
Feb 05, 2021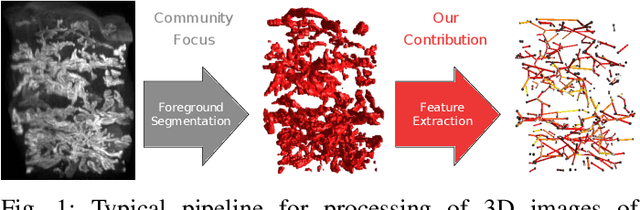
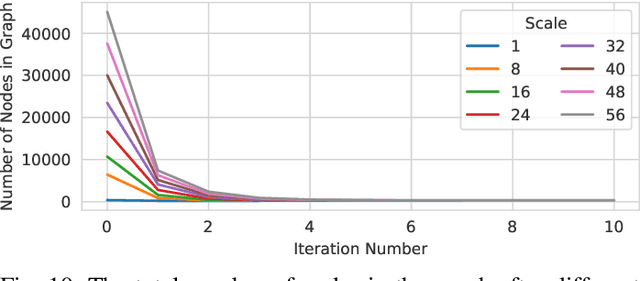
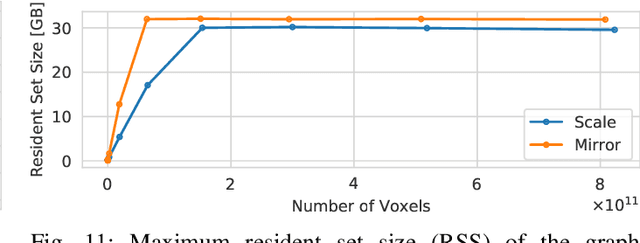
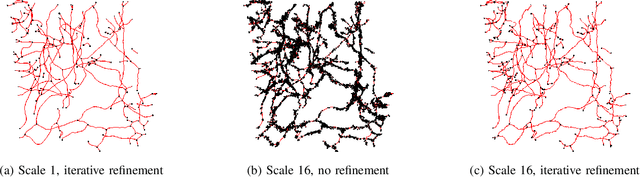
Recent advances in 3D imaging technologies provide novel insights to researchers and reveal finer and more detail of examined specimen, especially in the biomedical domain, but also impose huge challenges regarding scalability for automated analysis algorithms due to rapidly increasing dataset sizes. In particular, existing research towards automated vessel network analysis does not consider memory requirements of proposed algorithms and often generates a large number of spurious branches for structures consisting of many voxels. Additionally, very often these algorithms have further restrictions such as the limitation to tree topologies or relying on the properties of specific image modalities. We present a scalable pipeline (in terms of computational cost, required main memory and robustness) that extracts an annotated abstract graph representation from the foreground segmentation of vessel networks of arbitrary topology and vessel shape. Only a single, dimensionless, a-priori determinable parameter is required. By careful engineering of individual pipeline stages and a novel iterative refinement scheme we are, for the first time, able to analyze the topology of volumes of roughly 1TB on commodity hardware. An implementation of the presented pipeline is publicly available in version 5.1 of the volume rendering and processing engine Voreen (https://www.uni-muenster.de/Voreen/).
Fast and Accurate Multi-Body Simulation with Stiff Viscoelastic Contacts
Jan 18, 2021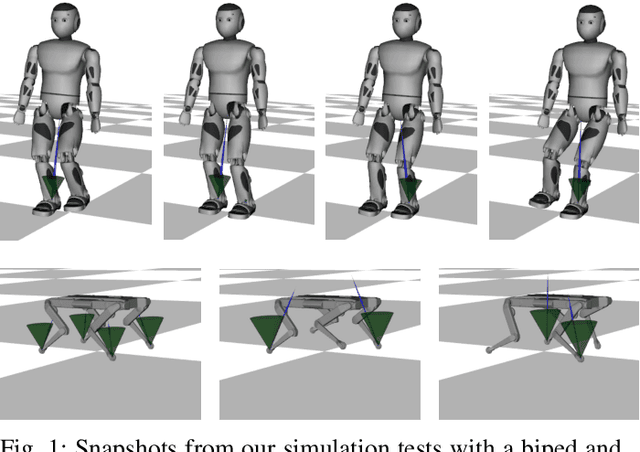
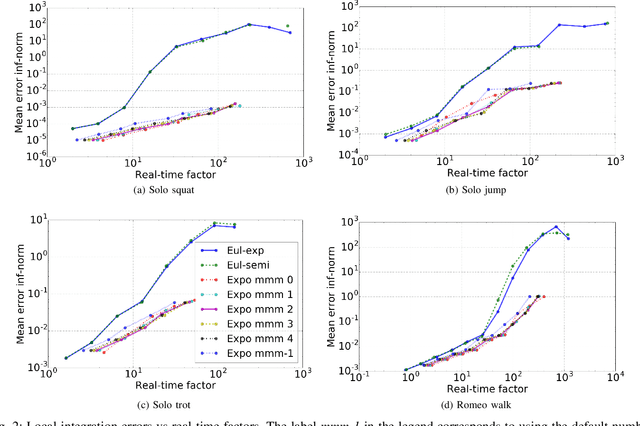
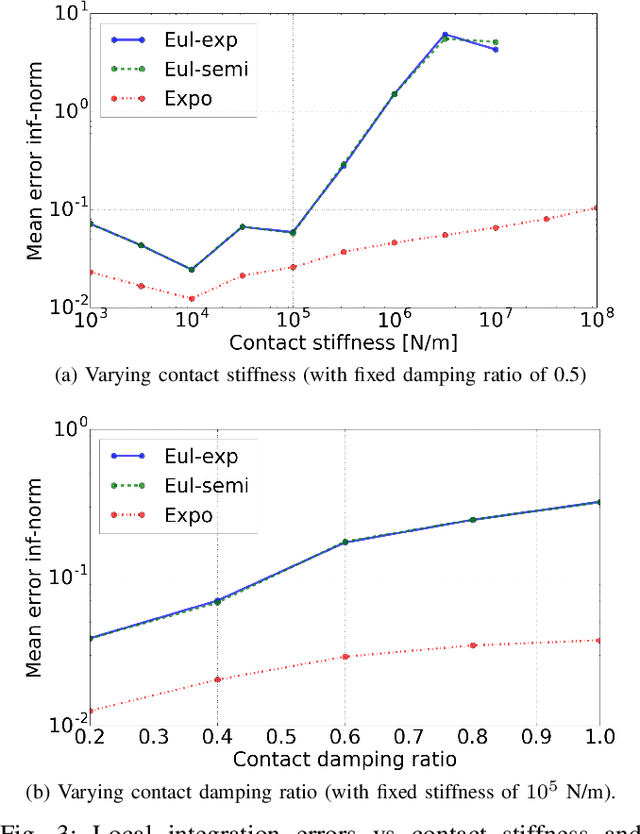
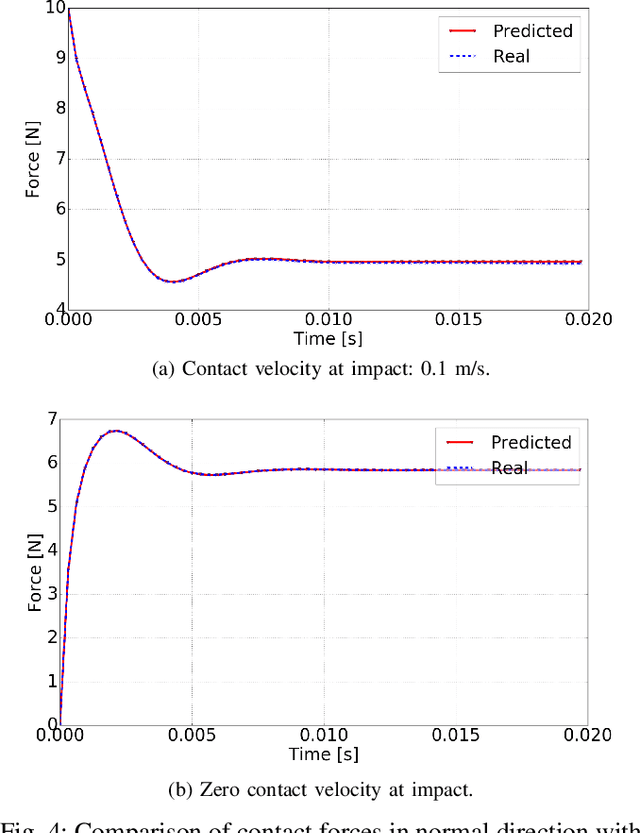
The simulation of multi-body systems with frictional contacts is a fundamental tool for many fields, such as robotics, computer graphics, and mechanics. Hard frictional contacts are particularly troublesome to simulate because they make the differential equations stiff, calling for computationally demanding implicit integration schemes. We suggest to tackle this issue by using exponential integrators, a long-standing class of integration schemes (first introduced in the 60's) that in recent years has enjoyed a resurgence of interest. We show that this scheme can be easily applied to multi-body systems subject to stiff viscoelastic contacts, producing accurate results at lower computational cost than classic explicit schemes. In our tests with quadruped and biped robots, our method demonstrated stable behaviors with large time steps (10 ms) and stiff contacts ($10^5$ N/m). Its excellent properties, especially for fast and coarse simulations, make it a valuable candidate for many applications in robotics, such as simulation, Model Predictive Control, Reinforcement Learning, and controller design.
A Hierarchical Deep Actor-Critic Learning Method for Joint Distribution System State Estimation
Dec 04, 2020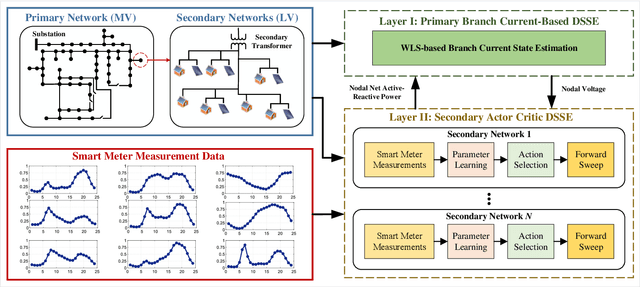
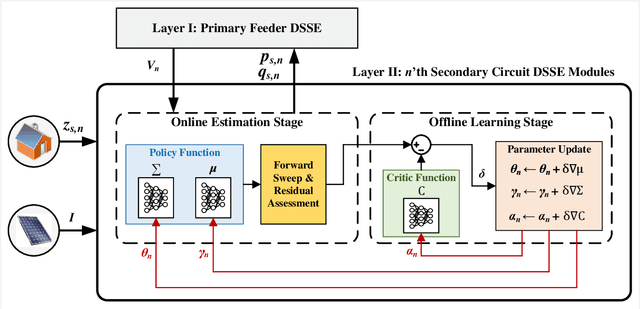
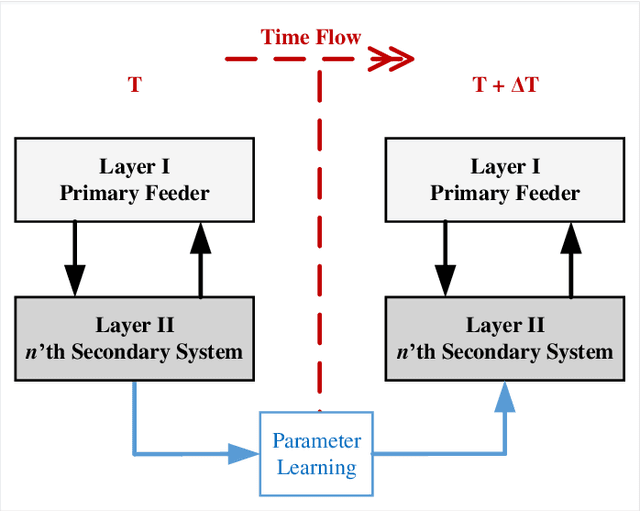
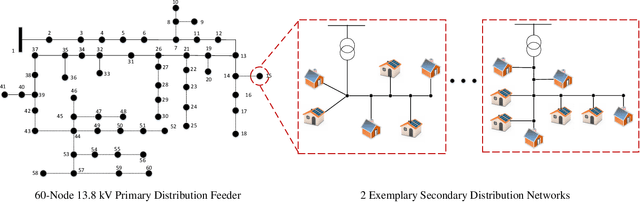
Due to increasing penetration of volatile distributed photovoltaic (PV) resources, real-time monitoring of customers at the grid-edge has become a critical task. However, this requires solving the distribution system state estimation (DSSE) jointly for both primary and secondary levels of distribution grids, which is computationally complex and lacks scalability to large systems. To achieve near real-time solutions for DSSE, we present a novel hierarchical reinforcement learning-aided framework: at the first layer, a weighted least squares (WLS) algorithm solves the DSSE over primary medium-voltage feeders; at the second layer, deep actor-critic (A-C) modules are trained for each secondary transformer using measurement residuals to estimate the states of low-voltage circuits and capture the impact of PVs at the grid-edge. While the A-C parameter learning process takes place offline, the trained A-C modules are deployed online for fast secondary grid state estimation; this is the key factor in scalability and computational efficiency of the framework. To maintain monitoring accuracy, the two levels exchange boundary information with each other at the secondary nodes, including transformer voltages (first layer to second layer) and active/reactive total power injection (second layer to first layer). This interactive information passing strategy results in a closed-loop structure that is able to track optimal solutions at both layers in few iterations. Moreover, our model can handle the topology changes using the Jacobian matrices of the first layer. We have performed numerical experiments using real utility data and feeder models to verify the performance of the proposed framework.
Double-Adversarial Activation Anomaly Detection: Adversarial Autoencoders are Anomaly Generators
Jan 12, 2021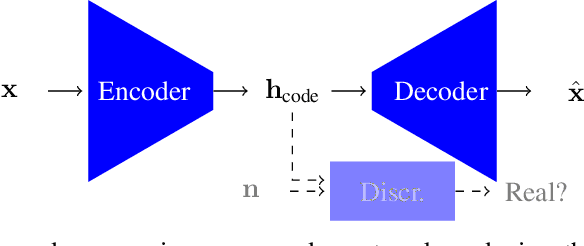
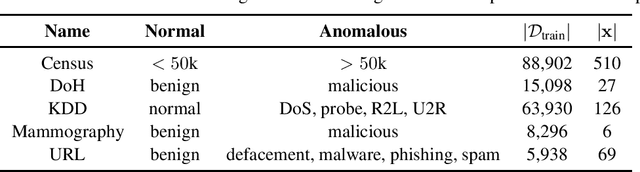
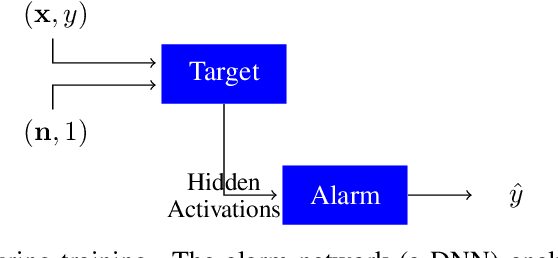
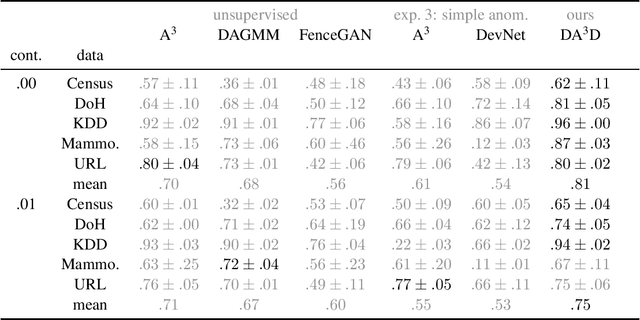
Anomaly detection is a challenging task for machine learning algorithms due to the inherent class imbalance. It is costly and time-demanding to manually analyse the observed data, thus usually only few known anomalies if any are available. Inspired by generative models and the analysis of the hidden activations of neural networks, we introduce a novel unsupervised anomaly detection method called DA3D. Here, we use adversarial autoencoders to generate anomalous counterexamples based on the normal data only. These artificial anomalies used during training allow the detection of real, yet unseen anomalies. With our novel generative approach, we transform the unsupervised task of anomaly detection to a supervised one, which is more tractable by machine learning and especially deep learning methods. DA3D surpasses the performance of state-of-the-art anomaly detection methods in a purely data-driven way, where no domain knowledge is required.
Synthesising a Database of Parameterised Linear and Non-Linear Invariants for Time-Series Constraints
Jan 15, 2019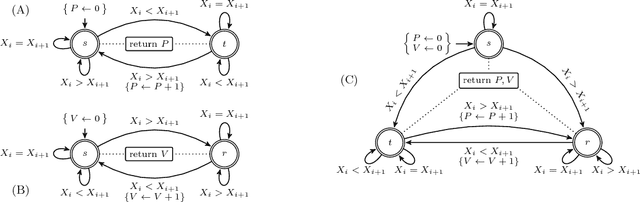
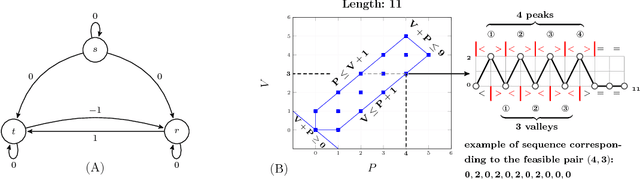
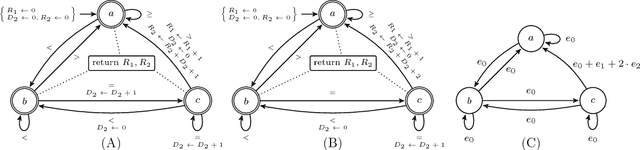
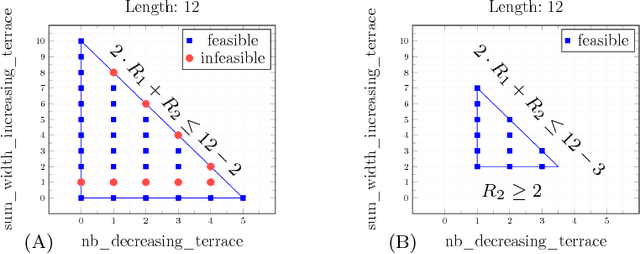
Many constraints restricting the result of some computations over an integer sequence can be compactly represented by register automata. We improve the propagation of the conjunction of such constraints on the same sequence by synthesising a database of linear and non-linear invariants using their register-automaton representation. The obtained invariants are formulae parameterised by a function of the sequence length and proven to be true for any long enough sequence. To assess the quality of such linear invariants, we developed a method to verify whether a generated linear invariant is a facet of the convex hull of the feasible points. This method, as well as the proof of non-linear invariants, are based on the systematic generation of constant-size deterministic finite automata that accept all integer sequences whose result verifies some simple condition. We apply such methodology to a set of 44 time-series constraints and obtain 1400 linear invariants from which 70% are facet defining, and 600 non-linear invariants, which were tested on short-term electricity production problems.
A Simple Cooperative Diversity Method Based on Deep-Learning-Aided Relay Selection
Feb 05, 2021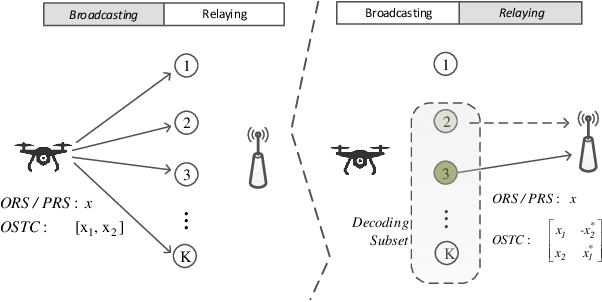
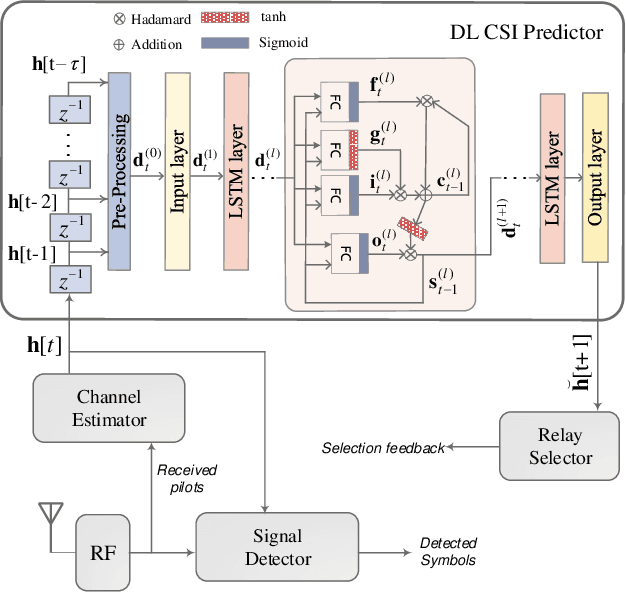
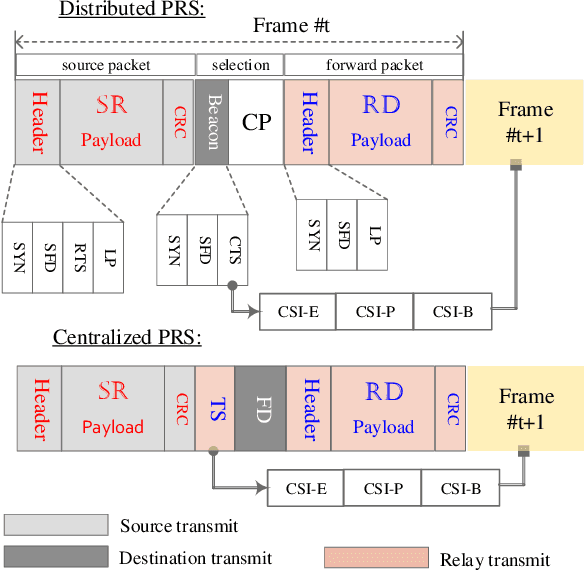
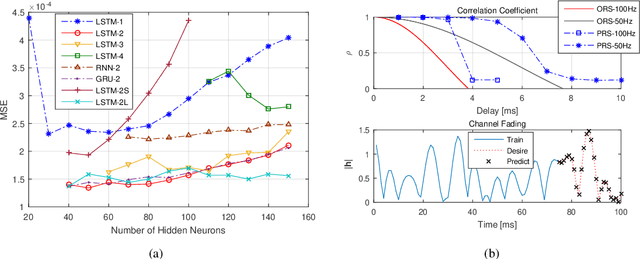
Opportunistic relay selection (ORS) has been recognized as a simple but efficient method for mobile nodes to achieve cooperative diversity in slow fading channels. However, the wrong selection of the best relay arising from outdated channel state information (CSI) in fast time-varying channels substantially degrades its performance. With the proliferation of high-mobility applications and the adoption of higher frequency bands in 5G and beyond systems, the problem of outdated CSI will become more serious. Therefore, the design of a novel cooperative method that is applicable to not only slow fading but also fast fading is increasingly of importance. To this end, we develop and analyze a deep-learning-aided cooperative method coined predictive relay selection (PRS) in this article. It can remarkably improve the quality of CSI through fading channel prediction while retaining the simplicity of ORS by selecting a single opportunistic relay so as to avoid the complexity of multi-relay coordination and synchronization. Information-theoretic analysis and numerical results in terms of outage probability and channel capacity reveal that PRS achieves full diversity gain in slow fading wireless environments and substantially outperforms the existing schemes in fast fading channels.
Confidence-Budget Matching for Sequential Budgeted Learning
Feb 05, 2021A core element in decision-making under uncertainty is the feedback on the quality of the performed actions. However, in many applications, such feedback is restricted. For example, in recommendation systems, repeatedly asking the user to provide feedback on the quality of recommendations will annoy them. In this work, we formalize decision-making problems with querying budget, where there is a (possibly time-dependent) hard limit on the number of reward queries allowed. Specifically, we consider multi-armed bandits, linear bandits, and reinforcement learning problems. We start by analyzing the performance of `greedy' algorithms that query a reward whenever they can. We show that in fully stochastic settings, doing so performs surprisingly well, but in the presence of any adversity, this might lead to linear regret. To overcome this issue, we propose the Confidence-Budget Matching (CBM) principle that queries rewards when the confidence intervals are wider than the inverse square root of the available budget. We analyze the performance of CBM based algorithms in different settings and show that they perform well in the presence of adversity in the contexts, initial states, and budgets.
Automatic Detection of Occulted Hard X-ray Flares Using Deep-Learning Methods
Jan 27, 2021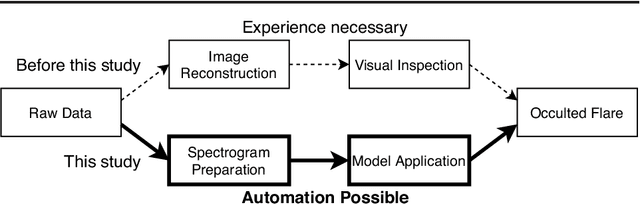
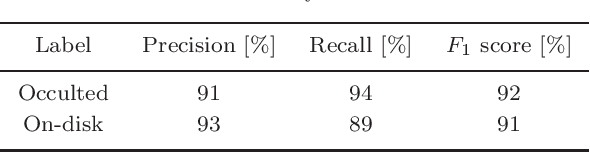
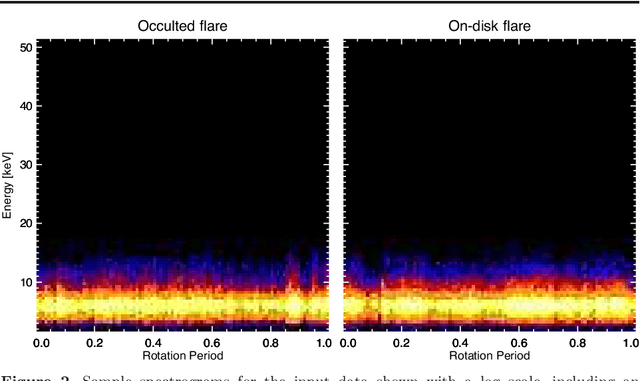

We present a concept for a machine-learning classification of hard X-ray (HXR) emissions from solar flares observed by the Reuven Ramaty High Energy Solar Spectroscopic Imager (RHESSI), identifying flares that are either occulted by the solar limb or located on the solar disk. Although HXR observations of occulted flares are important for particle-acceleration studies, HXR data analyses for past observations were time consuming and required specialized expertise. Machine-learning techniques are promising for this situation, and we constructed a sample model to demonstrate the concept using a deep-learning technique. Input data to the model are HXR spectrograms that are easily produced from RHESSI data. The model can detect occulted flares without the need for image reconstruction nor for visual inspection by experts. A technique of convolutional neural networks was used in this model by regarding the input data as images. Our model achieved a classification accuracy better than 90 %, and the ability for the application of the method to either event screening or for an event alert for occulted flares was successfully demonstrated.