 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Small Covers for Near-Zero Sets of Polynomials and Learning Latent Variable Models
Dec 14, 2020
Let $V$ be any vector space of multivariate degree-$d$ homogeneous polynomials with co-dimension at most $k$, and $S$ be the set of points where all polynomials in $V$ {\em nearly} vanish. We establish a qualitatively optimal upper bound on the size of $\epsilon$-covers for $S$, in the $\ell_2$-norm. Roughly speaking, we show that there exists an $\epsilon$-cover for $S$ of cardinality $M = (k/\epsilon)^{O_d(k^{1/d})}$. Our result is constructive yielding an algorithm to compute such an $\epsilon$-cover that runs in time $\mathrm{poly}(M)$. Building on our structural result, we obtain significantly improved learning algorithms for several fundamental high-dimensional probabilistic models with hidden variables. These include density and parameter estimation for $k$-mixtures of spherical Gaussians (with known common covariance), PAC learning one-hidden-layer ReLU networks with $k$ hidden units (under the Gaussian distribution), density and parameter estimation for $k$-mixtures of linear regressions (with Gaussian covariates), and parameter estimation for $k$-mixtures of hyperplanes. Our algorithms run in time {\em quasi-polynomial} in the parameter $k$. Previous algorithms for these problems had running times exponential in $k^{\Omega(1)}$. At a high-level our algorithms for all these learning problems work as follows: By computing the low-degree moments of the hidden parameters, we are able to find a vector space of polynomials that nearly vanish on the unknown parameters. Our structural result allows us to compute a quasi-polynomial sized cover for the set of hidden parameters, which we exploit in our learning algorithms.
Fundamental Limits on the Maximum Deviations in Control Systems: How Short Can Distribution Tails be Made by Feedback?
Dec 22, 2020
In this paper, we adopt an information-theoretic approach to investigate the fundamental lower bounds on the maximum deviations in feedback control systems, where the plant is linear time-invariant while the controller can generically be any causal functions as long as it stabilizes the plant. It is seen in general that the lower bounds are characterized by the unstable poles (or nonminimum-phase zeros) of the plant as well as the level of randomness (as quantified by the conditional entropy) contained in the disturbance. Such bounds provide fundamental limits on how short the distribution tails in control systems can be made by feedback.
Self-supervised Symmetric Nonnegative Matrix Factorization
Mar 02, 2021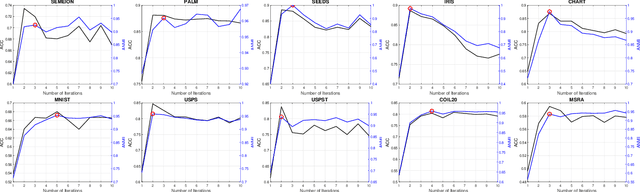
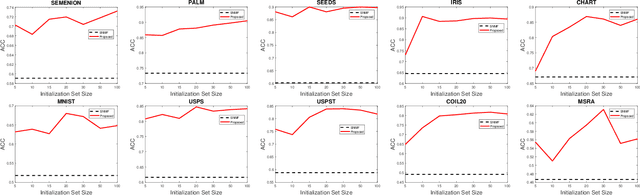
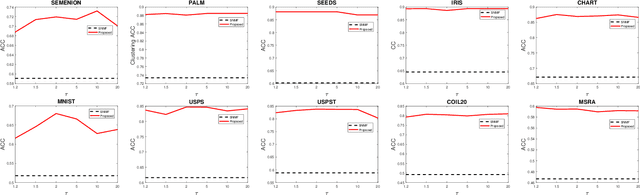
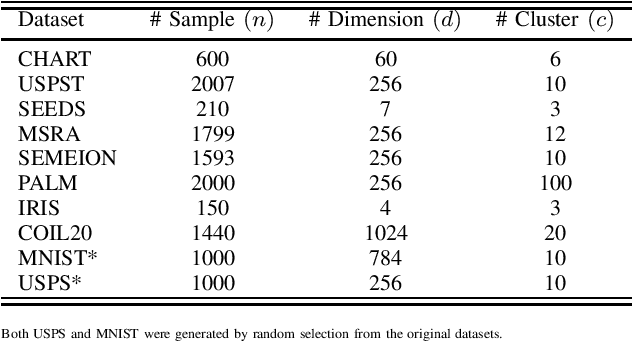
Symmetric nonnegative matrix factorization (SNMF) has demonstrated to be a powerful method for data clustering. However, SNMF is mathematically formulated as a non-convex optimization problem, making it sensitive to the initialization of variables. Inspired by ensemble clustering that aims to seek a better clustering result from a set of clustering results, we propose self-supervised SNMF (S$^3$NMF), which is capable of boosting clustering performance progressively by taking advantage of the sensitivity to initialization characteristic of SNMF, without relying on any additional information. Specifically, we first perform SNMF repeatedly with a random nonnegative matrix for initialization each time, leading to multiple decomposed matrices. Then, we rank the quality of the resulting matrices with adaptively learned weights, from which a new similarity matrix that is expected to be more discriminative is reconstructed for SNMF again. These two steps are iterated until the stopping criterion/maximum number of iterations is achieved. We mathematically formulate S$^3$NMF as a constraint optimization problem, and provide an alternative optimization algorithm to solve it with the theoretical convergence guaranteed. Extensive experimental results on $10$ commonly used benchmark datasets demonstrate the significant advantage of our S$^3$NMF over $12$ state-of-the-art methods in terms of $5$ quantitative metrics. The source code is publicly available at https://github.com/jyh-learning/SSSNMF.
BMART-Enabled Field-Map Combination of Projection-Reconstruction Phase-Cycled SSFP Cardiac Cine for Banding and Flow-Artifact Reduction
Feb 23, 2021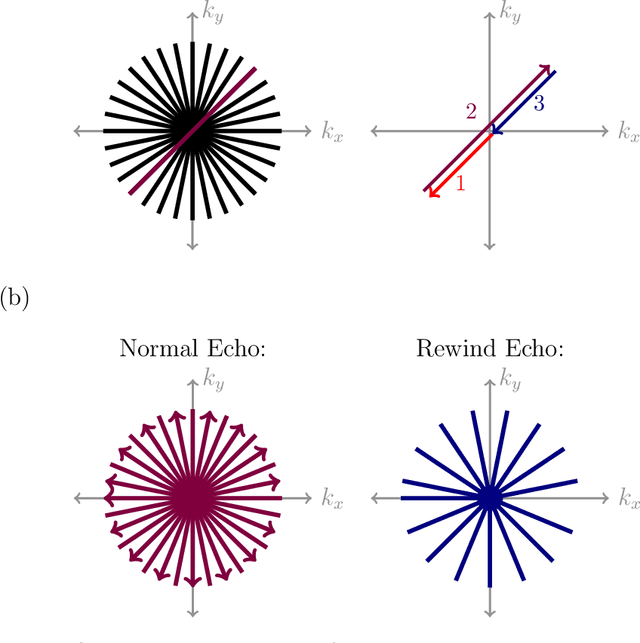
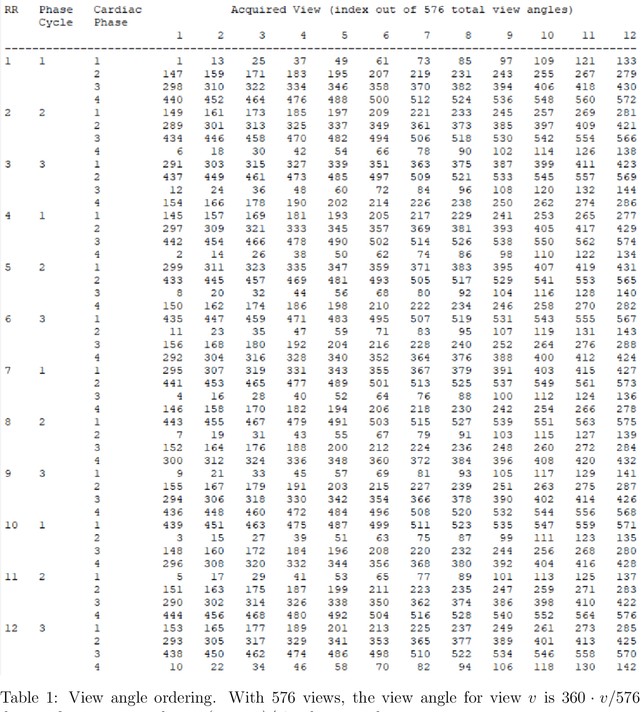
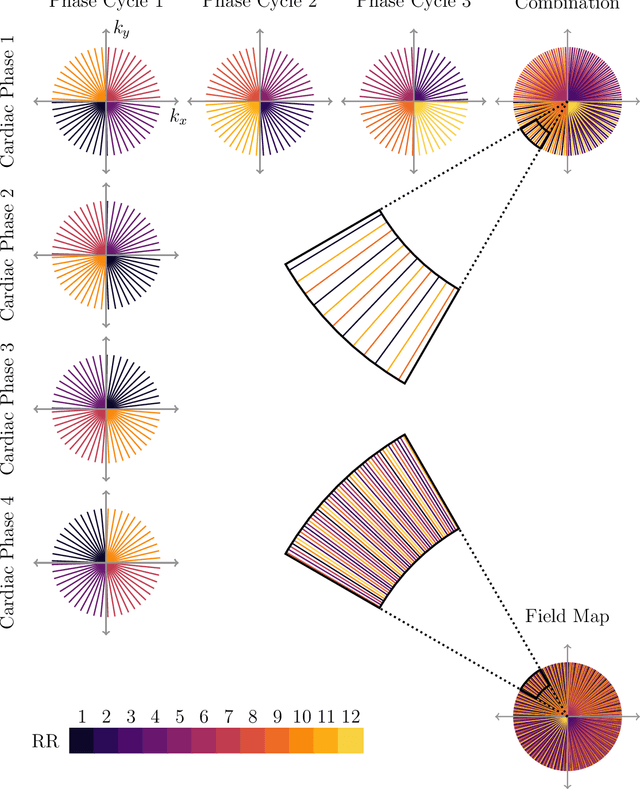
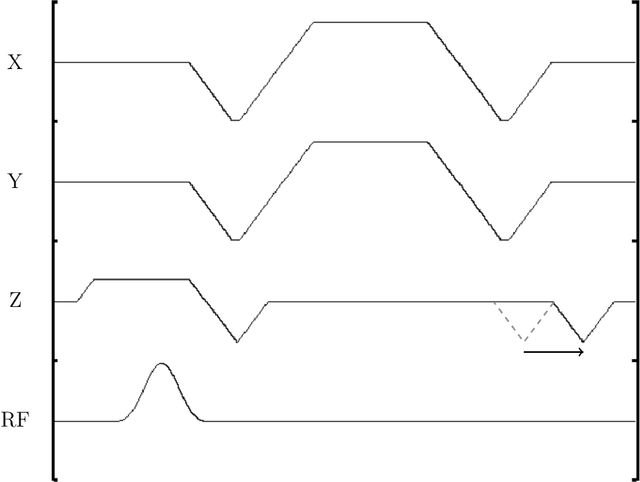
Purpose: To develop a method for banding-free bSSFP cardiac cine with substantially reduced flow artifacts. Methods: A projection-reconstruction (PR) trajectory is proposed for a frequency-modulated cine sequence, facilitating reconstruction of three phase cycles and a field-map time series from a short, breath-held scan. Data is also acquired during the gradient rewinders to enable generation of field maps using BMART, B$_0$ mapping using rewinding trajectories, where the rewind data forms the second TE image for calculating the field map. A field-map-based combination method is developed which weights the phase-cycle component images to include only passband signal in the final cine images, and exclude stopband and near-band flow artifacts. Results: The weights derived from the BMART-generated field maps mask out banding and near-band flow artifacts in and around the heart. Therefore, the field-map-based phase-cycle combination, which is facilitated by the PR acquisition with BMART, results in more homogeneous blood pools and reduced hyperintense regions than root-sum-of-squares. Conclusion: With the proposed techniques, using a non-Cartesian trajectory for a frequency-modulated cine sequence enables flow-artifact-reduced banding-free cardiac imaging within a short breath-hold.
Estimating Nonplanar Flow from 2D Motion-blurred Widefield Microscopy Images via Deep Learning
Feb 14, 2021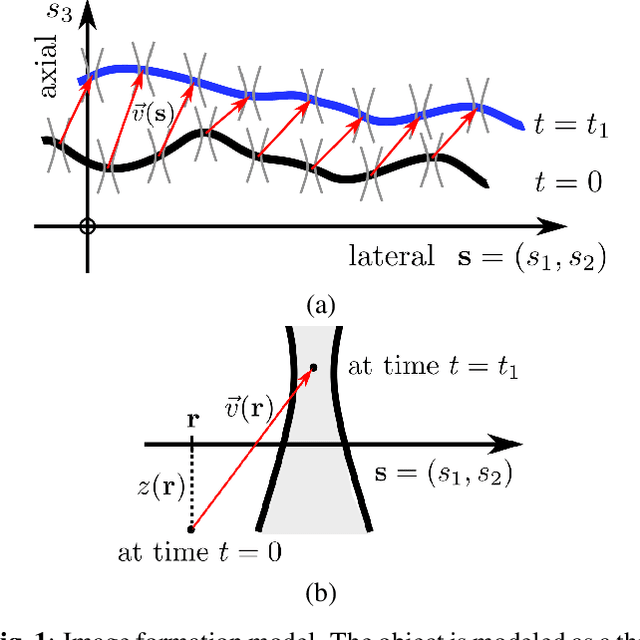
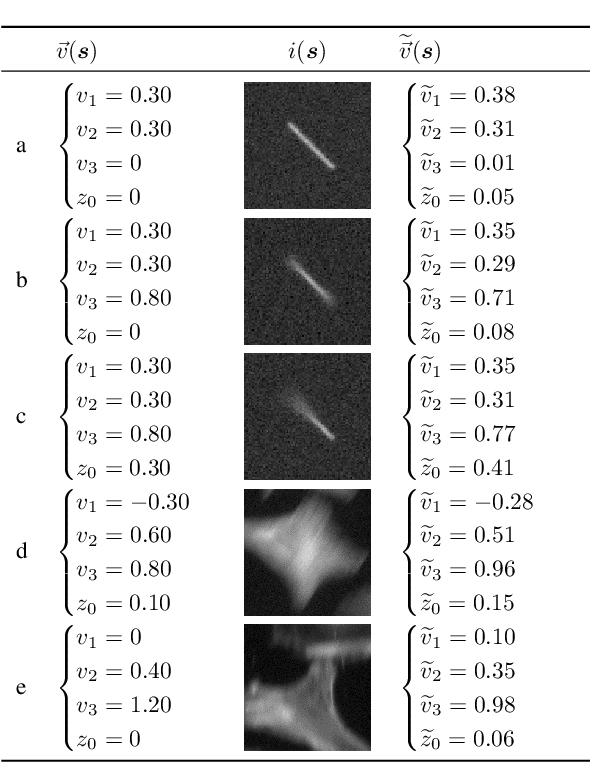
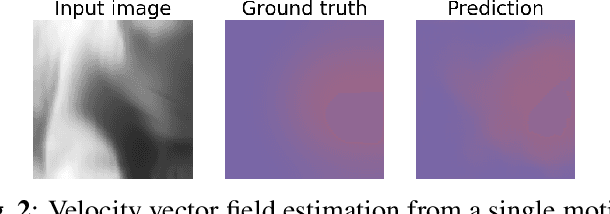
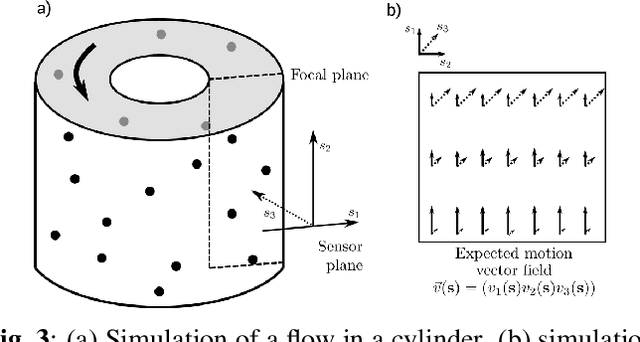
Optical flow is a method aimed at predicting the movement velocity of any pixel in the image and is used in medicine and biology to estimate flow of particles in organs or organelles. However, a precise optical flow measurement requires images taken at high speed and low exposure time, which induces phototoxicity due to the increase in illumination power. We are looking here to estimate the three-dimensional movement vector field of moving out-of-plane particles using normal light conditions and a standard microscope camera. We present a method to predict, from a single textured wide-field microscopy image, the movement of out-of-plane particles using the local characteristics of the motion blur. We estimated the velocity vector field from the local estimation of the blur model parameters using an deep neural network and achieved a prediction with a regression coefficient of 0.92 between the ground truth simulated vector field and the output of the network. This method could enable microscopists to gain insights about the dynamic properties of samples without the need for high-speed cameras or high-intensity light exposure.
Real-Time Dense Mapping for Self-driving Vehicles using Fisheye Cameras
Sep 17, 2018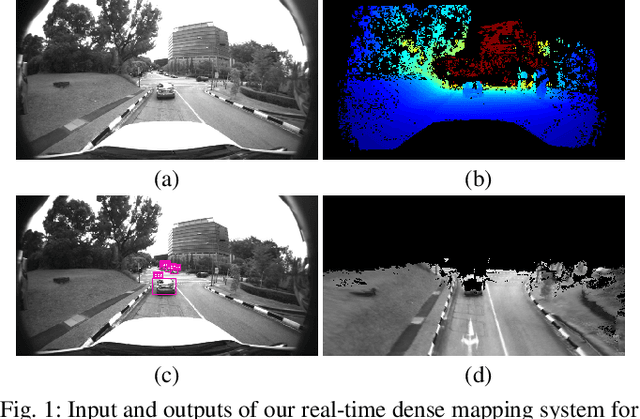
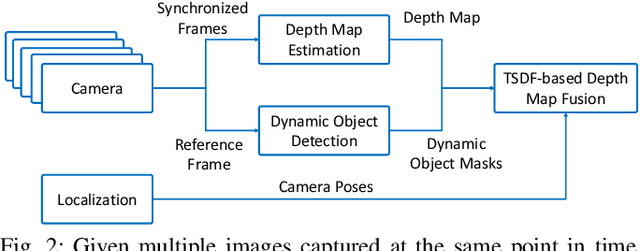

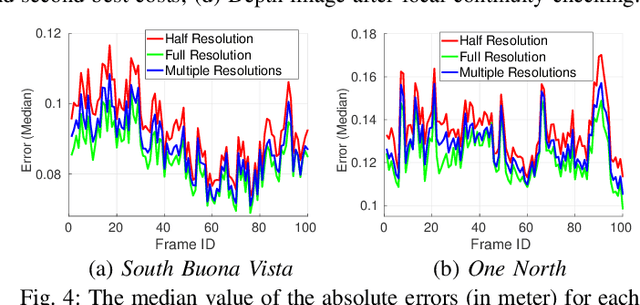
We present a real-time dense geometric mapping algorithm for large-scale environments. Unlike existing methods which use pinhole cameras, our implementation is based on fisheye cameras which have larger field of view and benefit some other tasks including Visual-Inertial Odometry, localization and object detection around vehicles. Our algorithm runs on in-vehicle PCs at 15 Hz approximately, enabling vision-only 3D scene perception for self-driving vehicles. For each synchronized set of images captured by multiple cameras, we first compute a depth map for a reference camera using plane-sweeping stereo. To maintain both accuracy and efficiency, while accounting for the fact that fisheye images have a rather low resolution, we recover the depths using multiple image resolutions. We adopt the fast object detection framework YOLOv3 to remove potentially dynamic objects. At the end of the pipeline, we fuse the fisheye depth images into the truncated signed distance function (TSDF) volume to obtain a 3D map. We evaluate our method on large-scale urban datasets, and results show that our method works well even in complex environments.
Exploring the Limits of Few-Shot Link Prediction in Knowledge Graphs
Feb 05, 2021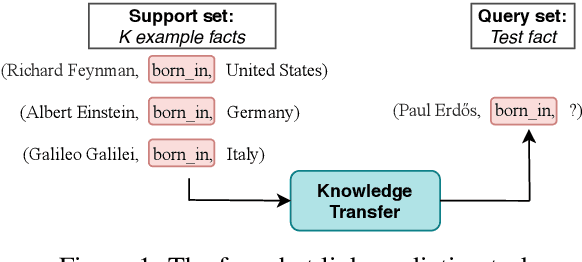
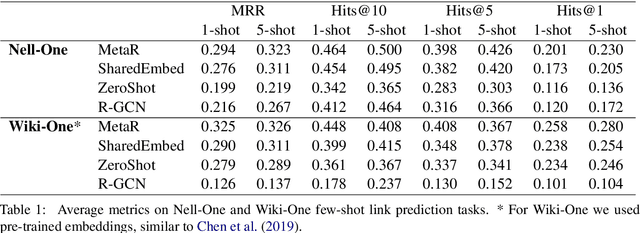

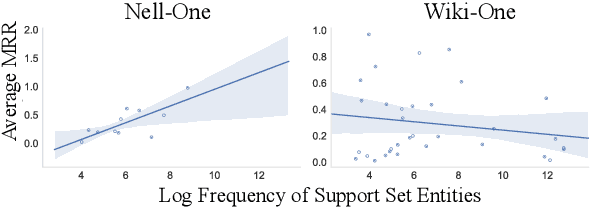
Real-world knowledge graphs are often characterized by low-frequency relations - a challenge that has prompted an increasing interest in few-shot link prediction methods. These methods perform link prediction for a set of new relations, unseen during training, given only a few example facts of each relation at test time. In this work, we perform a systematic study on a spectrum of models derived by generalizing the current state of the art for few-shot link prediction, with the goal of probing the limits of learning in this few-shot setting. We find that a simple zero-shot baseline - which ignores any relation-specific information - achieves surprisingly strong performance. Moreover, experiments on carefully crafted synthetic datasets show that having only a few examples of a relation fundamentally limits models from using fine-grained structural information and only allows for exploiting the coarse-grained positional information of entities. Together, our findings challenge the implicit assumptions and inductive biases of prior work and highlight new directions for research in this area.
* code available at https://github.com/dorajam/few-shot-link-prediction-paper
Interpretability of a Deep Learning Model in the Application of Cardiac MRI Segmentation with an ACDC Challenge Dataset
Mar 15, 2021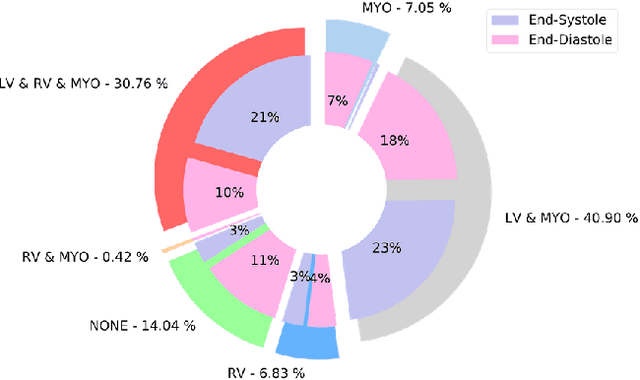
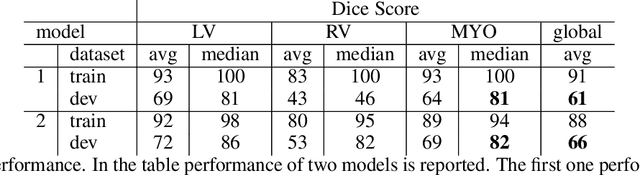
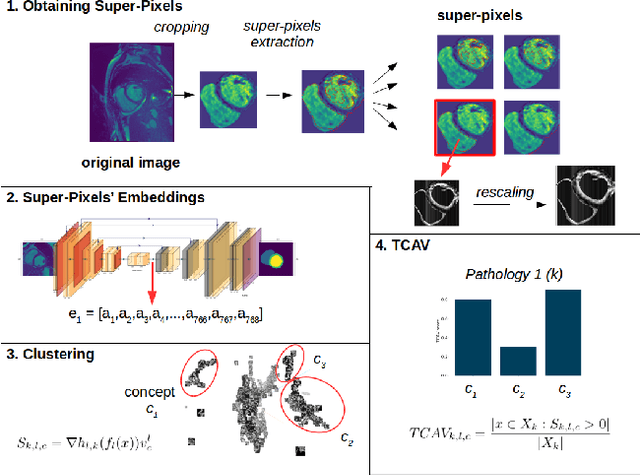
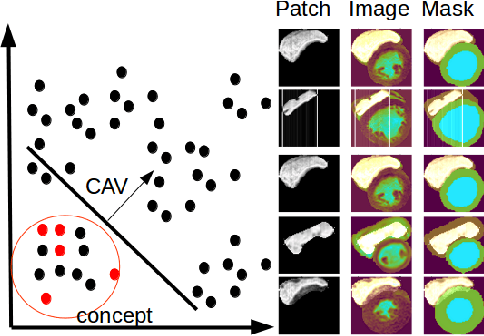
Cardiac Magnetic Resonance (CMR) is the most effective tool for the assessment and diagnosis of a heart condition, which malfunction is the world's leading cause of death. Software tools leveraging Artificial Intelligence already enhance radiologists and cardiologists in heart condition assessment but their lack of transparency is a problem. This project investigates if it is possible to discover concepts representative for different cardiac conditions from the deep network trained to segment crdiac structures: Left Ventricle (LV), Right Ventricle (RV) and Myocardium (MYO), using explainability methods that enhances classification system by providing the score-based values of qualitative concepts, along with the key performance metrics. With introduction of a need of explanations in GDPR explainability of AI systems is necessary. This study applies Discovering and Testing with Concept Activation Vectors (D-TCAV), an interpretaibilty method to extract underlying features important for cardiac disease diagnosis from MRI data. The method provides a quantitative notion of concept importance for disease classified. In previous studies, the base method is applied to the classification of cardiac disease and provides clinically meaningful explanations for the predictions of a black-box deep learning classifier. This study applies a method extending TCAV with a Discovering phase (D-TCAV) to cardiac MRI analysis. The advantage of the D-TCAV method over the base method is that it is user-independent. The contribution of this study is a novel application of the explainability method D-TCAV for cardiac MRI anlysis. D-TCAV provides a shorter pre-processing time for clinicians than the base method.
On Infusing Reachability-Based Safety Assurance within Planning Frameworks for Human-Robot Vehicle Interactions
Dec 06, 2020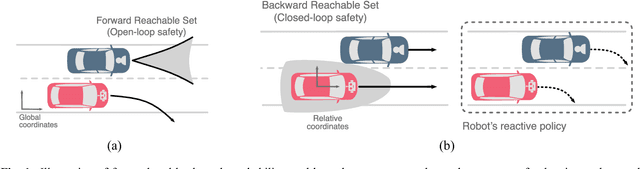

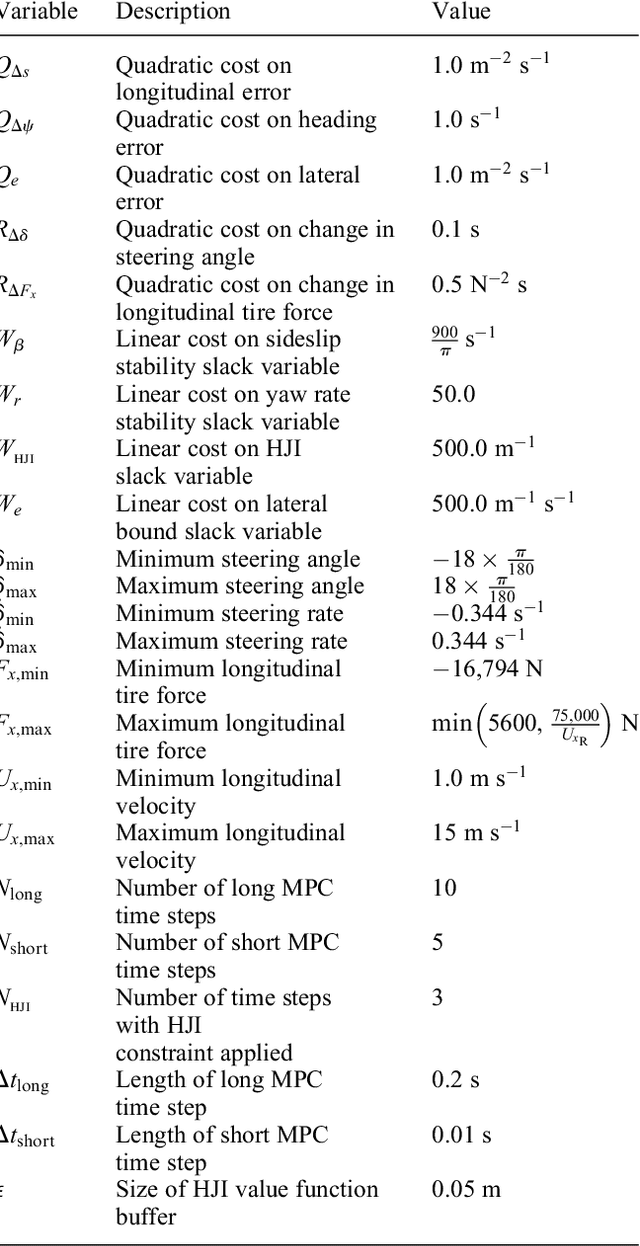
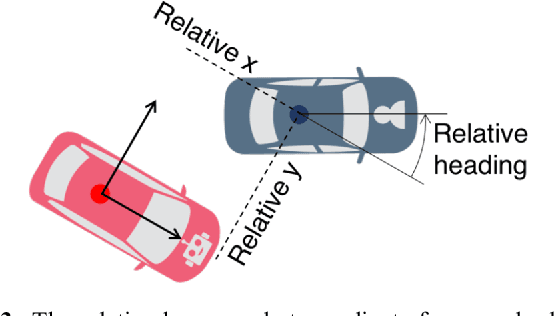
Action anticipation, intent prediction, and proactive behavior are all desirable characteristics for autonomous driving policies in interactive scenarios. Paramount, however, is ensuring safety on the road -- a key challenge in doing so is accounting for uncertainty in human driver actions without unduly impacting planner performance. This paper introduces a minimally-interventional safety controller operating within an autonomous vehicle control stack with the role of ensuring collision-free interaction with an externally controlled (e.g., human-driven) counterpart while respecting static obstacles such as a road boundary wall. We leverage reachability analysis to construct a real-time (100Hz) controller that serves the dual role of (i) tracking an input trajectory from a higher-level planning algorithm using model predictive control, and (ii) assuring safety by maintaining the availability of a collision-free escape maneuver as a persistent constraint regardless of whatever future actions the other car takes. A full-scale steer-by-wire platform is used to conduct traffic weaving experiments wherein two cars, initially side-by-side, must swap lanes in a limited amount of time and distance, emulating cars merging onto/off of a highway. We demonstrate that, with our control stack, the autonomous vehicle is able to avoid collision even when the other car defies the planner's expectations and takes dangerous actions, either carelessly or with the intent to collide, and otherwise deviates minimally from the planned trajectory to the extent required to maintain safety.
* arXiv admin note: text overlap with arXiv:1812.11315
Robust Single-step Adversarial Training with Regularizer
Feb 05, 2021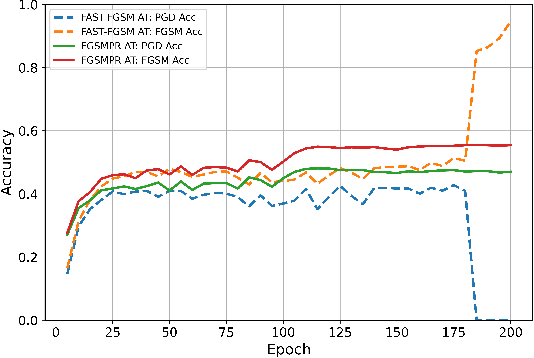

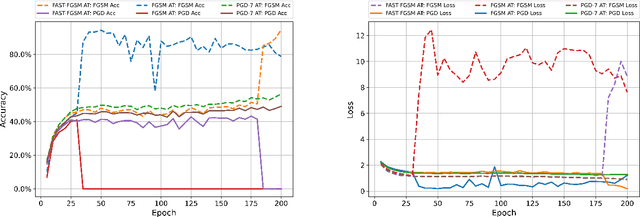

High cost of training time caused by multi-step adversarial example generation is a major challenge in adversarial training. Previous methods try to reduce the computational burden of adversarial training using single-step adversarial example generation schemes, which can effectively improve the efficiency but also introduce the problem of catastrophic overfitting, where the robust accuracy against Fast Gradient Sign Method (FGSM) can achieve nearby 100\% whereas the robust accuracy against Projected Gradient Descent (PGD) suddenly drops to 0\% over a single epoch. To address this problem, we propose a novel Fast Gradient Sign Method with PGD Regularization (FGSMPR) to boost the efficiency of adversarial training without catastrophic overfitting. Our core idea is that single-step adversarial training can not learn robust internal representations of FGSM and PGD adversarial examples. Therefore, we design a PGD regularization term to encourage similar embeddings of FGSM and PGD adversarial examples. The experiments demonstrate that our proposed method can train a robust deep network for L$_\infty$-perturbations with FGSM adversarial training and reduce the gap to multi-step adversarial training.