 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Optimizing Optimizers: Regret-optimal gradient descent algorithms
Dec 31, 2020

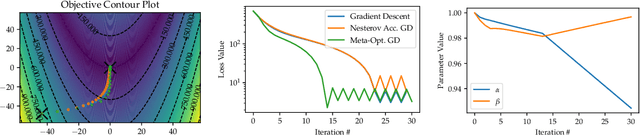
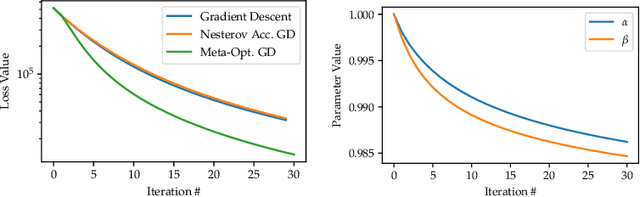
The need for fast and robust optimization algorithms are of critical importance in all areas of machine learning. This paper treats the task of designing optimization algorithms as an optimal control problem. Using regret as a metric for an algorithm's performance, we derive the necessary and sufficient dynamics that regret-optimal algorithms must satisfy as a discrete-time difference equation. We study the existence, uniqueness and consistency of regret-optimal algorithms and derive bounds on rates of convergence to solutions of convex optimization problems. Though closed-form optimal dynamics cannot be obtained in general, we present fast numerical methods for approximating them, generating optimization algorithms which directly optimize their long-term regret. Lastly, these are benchmarked against commonly used optimization algorithms to demonstrate their effectiveness.
LUCIDGames: Online Unscented Inverse Dynamic Games for Adaptive Trajectory Prediction and Planning
Nov 16, 2020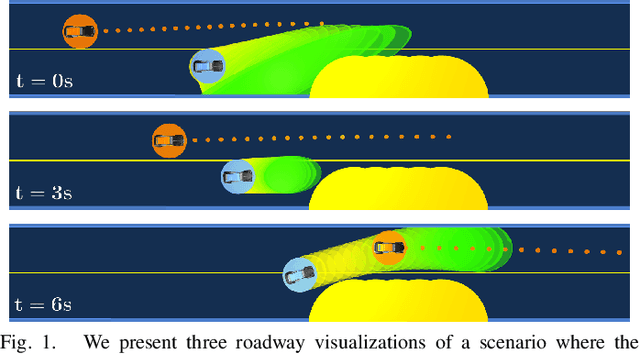
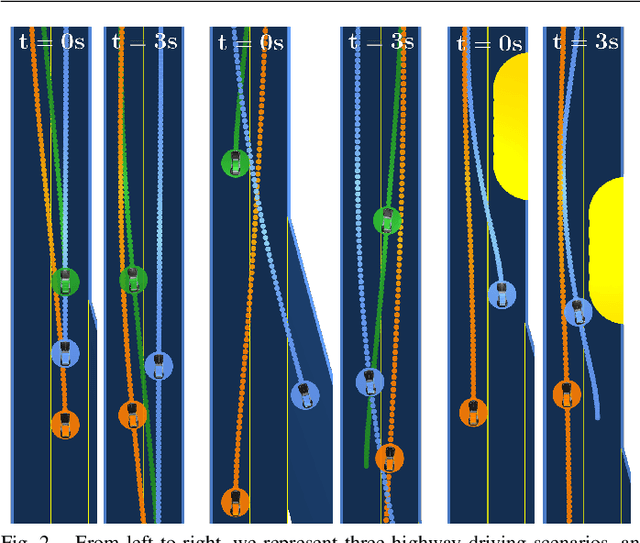
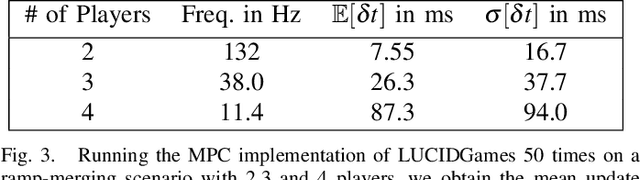
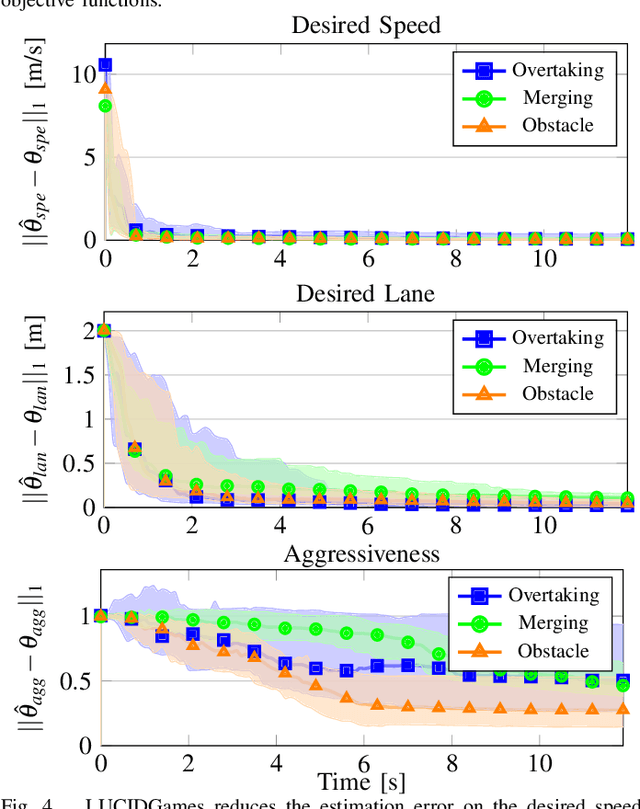
Existing game-theoretic planning methods assume that the robot knows the objective functions of the other agents a priori while, in practical scenarios, this is rarely the case. This paper introduces LUCIDGames, an inverse optimal control algorithm that is able to estimate the other agents' objective functions in real time, and incorporate those estimates online into a receding-horizon game-theoretic planner. LUCIDGames solves the inverse optimal control problem by recasting it in a recursive parameter-estimation framework. LUCIDGames uses an unscented Kalman filter (UKF) to iteratively update a Bayesian estimate of the other agents' cost function parameters, improving that estimate online as more data is gathered from the other agents' observed trajectories. The planner then takes account of the uncertainty in the Bayesian parameter estimates of other agents by planning a trajectory for the robot subject to uncertainty ellipse constraints. The algorithm assumes no explicit communication or coordination between the robot and the other agents in the environment. An MPC implementation of LUCIDGames demonstrates real-time performance on complex autonomous driving scenarios with an update frequency of 40 Hz. Empirical results demonstrate that LUCIDGames improves the robot's performance over existing game-theoretic and traditional MPC planning approaches. Our implementation of LUCIDGames is available at https://github.com/RoboticExplorationLab/LUCIDGames.jl.
MRSaiFE: Tissue Heating Prediction for MRI: a Feasibility Study
Feb 01, 2021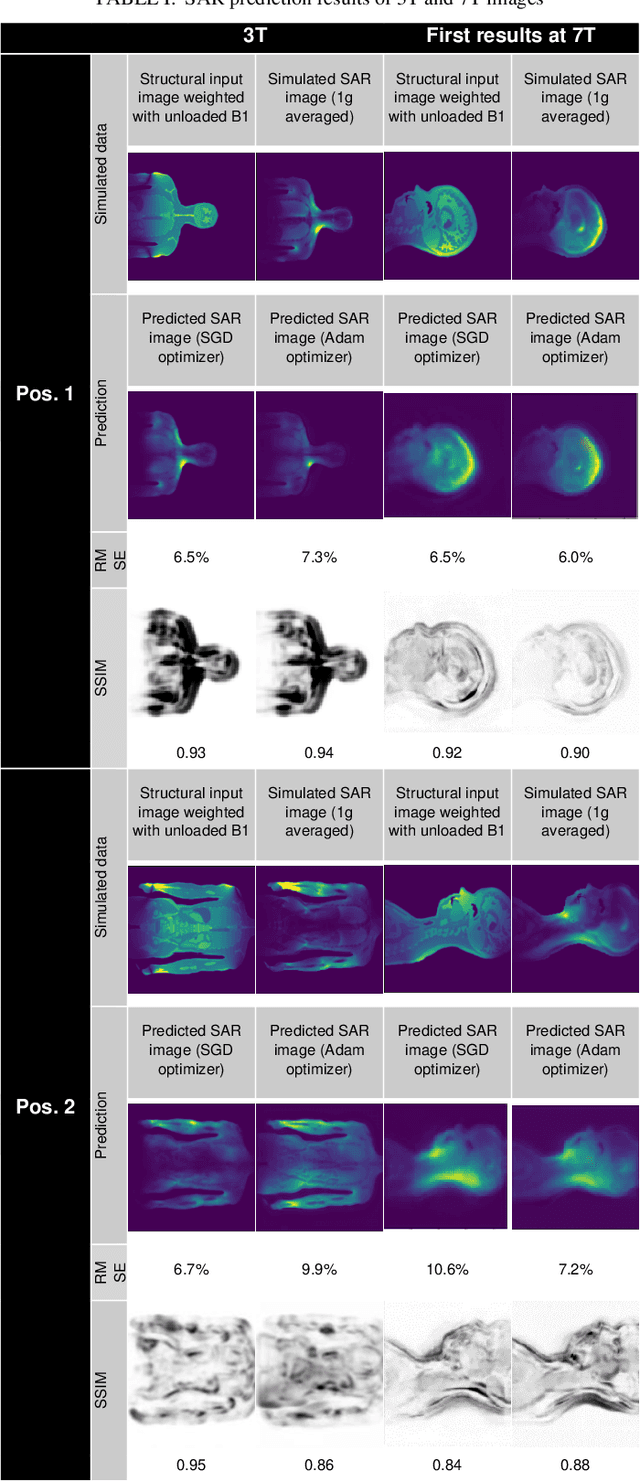
A to-date unsolved and highly limiting safety concern for Ultra High-Field (UHF) magnetic resonance imaging (MRI) is the deposition of radiofrequency (RF) power in the body, quantified by the specific absorption rate (SAR), leading to dangerous tissue heating/damage in the form of local SAR hotspots that cannot currently be measured/monitored, thereby severely limiting the applicability of the technology for clinical practice and in regulatory approval. The goal of this study has been to show proof of concept of an artificial intelligence (AI) based exam-integrated real-time MRI safety prediction software (MRSaiFE) facilitating the safe generation of 3T and 7T images by means of accurate local SAR-monitoring at sub-W/kg levels. We trained the software with a small database of image as a feasibility study and achieved successful proof of concept for both field strengths. SAR patterns were predicted with a residual root mean squared error (RSME) of <11% along with a structural similarity (SSIM) level of >84% for both field strengths (3T and 7T).
Efficient Encrypted Inference on Ensembles of Decision Trees
Mar 05, 2021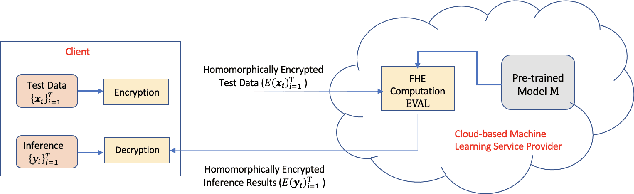
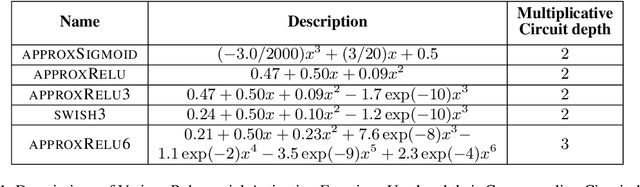
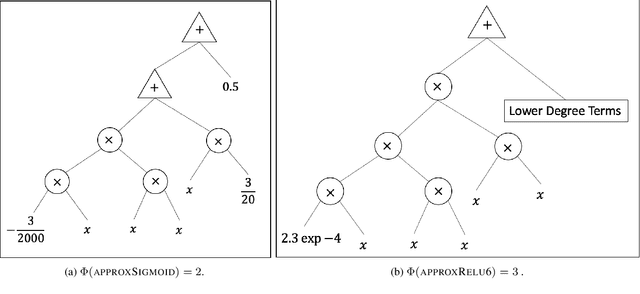
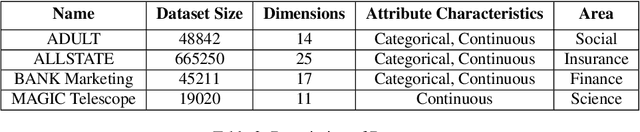
Data privacy concerns often prevent the use of cloud-based machine learning services for sensitive personal data. While homomorphic encryption (HE) offers a potential solution by enabling computations on encrypted data, the challenge is to obtain accurate machine learning models that work within the multiplicative depth constraints of a leveled HE scheme. Existing approaches for encrypted inference either make ad-hoc simplifications to a pre-trained model (e.g., replace hard comparisons in a decision tree with soft comparators) at the cost of accuracy or directly train a new depth-constrained model using the original training set. In this work, we propose a framework to transfer knowledge extracted by complex decision tree ensembles to shallow neural networks (referred to as DTNets) that are highly conducive to encrypted inference. Our approach minimizes the accuracy loss by searching for the best DTNet architecture that operates within the given depth constraints and training this DTNet using only synthetic data sampled from the training data distribution. Extensive experiments on real-world datasets demonstrate that these characteristics are critical in ensuring that DTNet accuracy approaches that of the original tree ensemble. Our system is highly scalable and can perform efficient inference on batched encrypted (134 bits of security) data with amortized time in milliseconds. This is approximately three orders of magnitude faster than the standard approach of applying soft comparison at the internal nodes of the ensemble trees.
Application of computer simulation results and machine learning in analysis of microwave radiothermometry data
Dec 18, 2020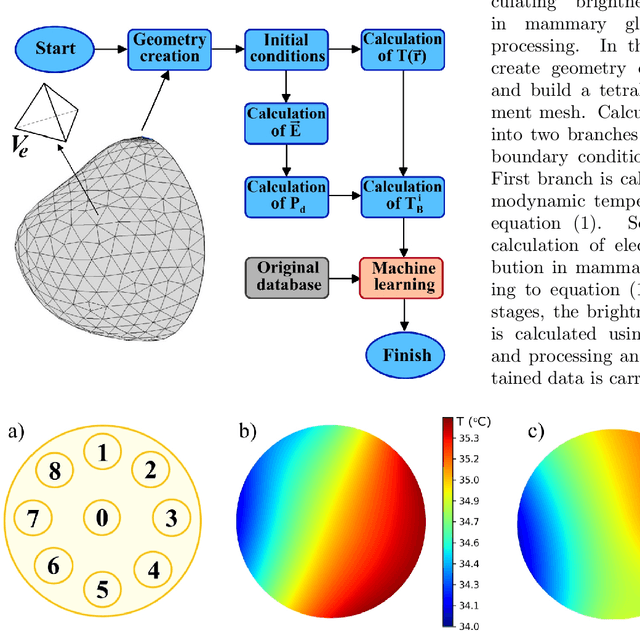
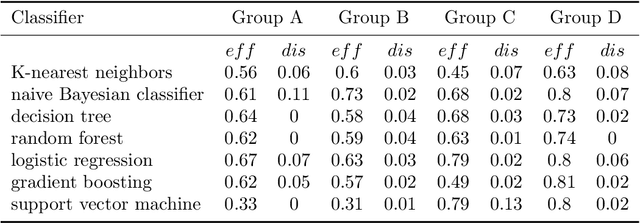
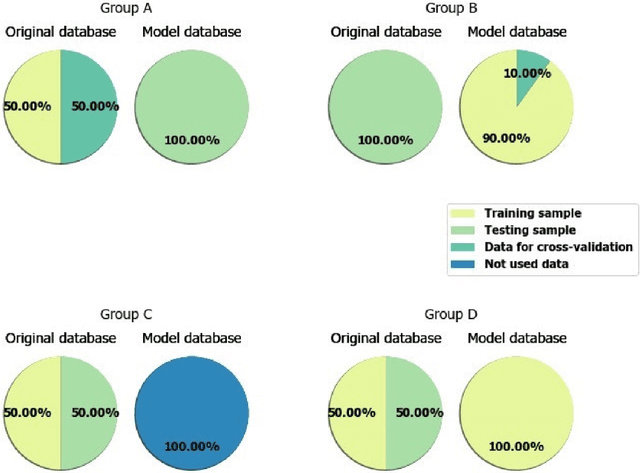
This work was done with the aim of developing the fundamental breast cancer early differential diagnosis foundations based on modeling the space-time temperature distribution using the microwave radiothermometry method and obtained data intelligent analysis. The article deals with the machine learning application in the microwave radiothermometry data analysis. The problems associated with the construction mammary glands temperature fields computer models for patients with various diagnostics classes, are also discussed. With the help of a computer experiment, based on the machine learning algorithms set (logistic regression, naive Bayesian classifier, support vector machine, decision tree, gradient boosting, K-nearest neighbors, etc.) usage, the mammary glands temperature fields computer models set adequacy.
Risk Aware and Multi-Objective Decision Making with Distributional Monte Carlo Tree Search
Feb 01, 2021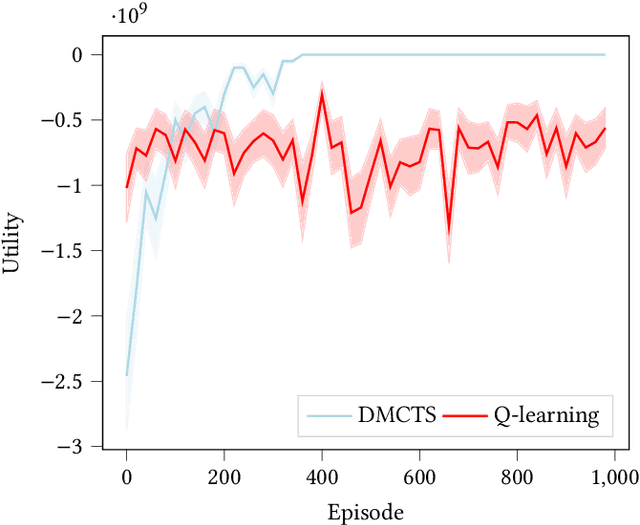
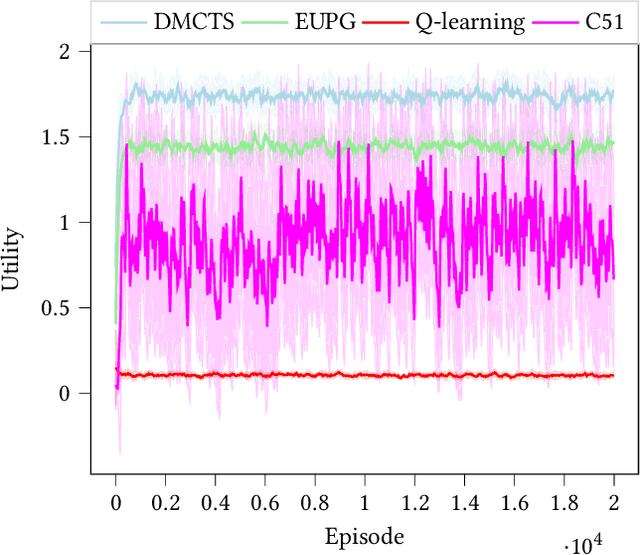
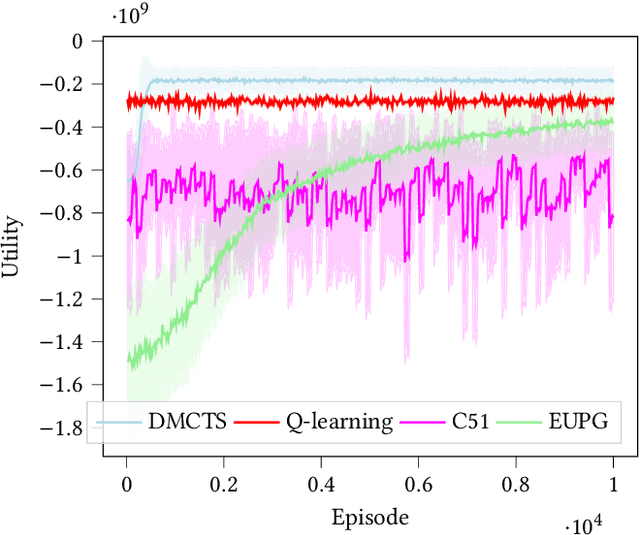
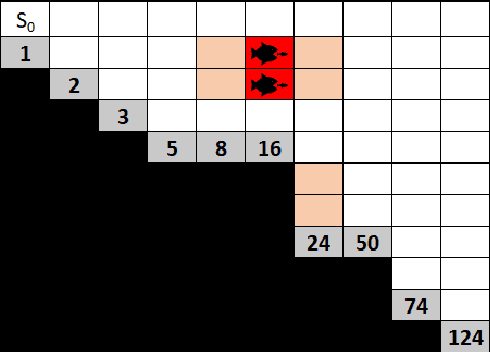
In many risk-aware and multi-objective reinforcement learning settings, the utility of the user is derived from the single execution of a policy. In these settings, making decisions based on the average future returns is not suitable. For example, in a medical setting a patient may only have one opportunity to treat their illness. When making a decision, just the expected return -- known in reinforcement learning as the value -- cannot account for the potential range of adverse or positive outcomes a decision may have. Our key insight is that we should use the distribution over expected future returns differently to represent the critical information that the agent requires at decision time. In this paper, we propose Distributional Monte Carlo Tree Search, an algorithm that learns a posterior distribution over the utility of the different possible returns attainable from individual policy executions, resulting in good policies for both risk-aware and multi-objective settings. Moreover, our algorithm outperforms the state-of-the-art in multi-objective reinforcement learning for the expected utility of the returns.
Many-to-One Distribution Learning and K-Nearest Neighbor Smoothing for Thoracic Disease Identification
Feb 26, 2021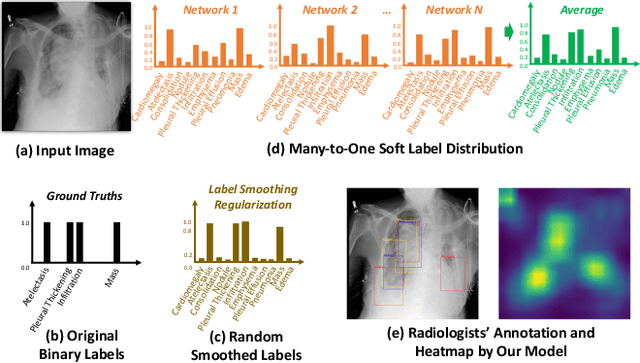

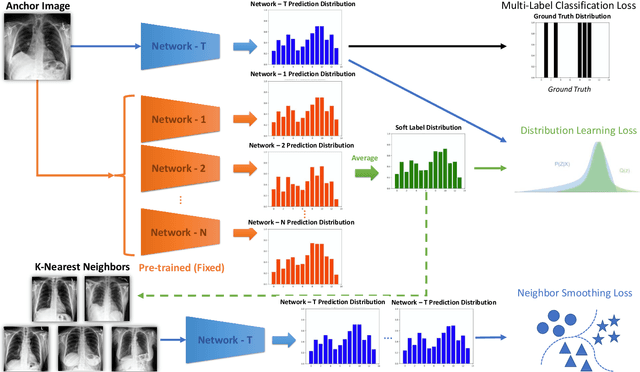
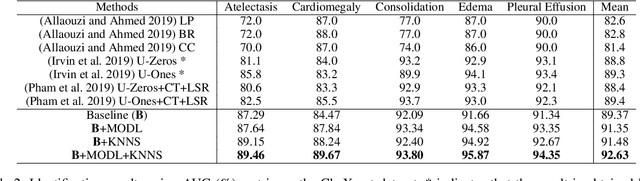
Chest X-rays are an important and accessible clinical imaging tool for the detection of many thoracic diseases. Over the past decade, deep learning, with a focus on the convolutional neural network (CNN), has become the most powerful computer-aided diagnosis technology for improving disease identification performance. However, training an effective and robust deep CNN usually requires a large amount of data with high annotation quality. For chest X-ray imaging, annotating large-scale data requires professional domain knowledge and is time-consuming. Thus, existing public chest X-ray datasets usually adopt language pattern based methods to automatically mine labels from reports. However, this results in label uncertainty and inconsistency. In this paper, we propose many-to-one distribution learning (MODL) and K-nearest neighbor smoothing (KNNS) methods from two perspectives to improve a single model's disease identification performance, rather than focusing on an ensemble of models. MODL integrates multiple models to obtain a soft label distribution for optimizing the single target model, which can reduce the effects of original label uncertainty. Moreover, KNNS aims to enhance the robustness of the target model to provide consistent predictions on images with similar medical findings. Extensive experiments on the public NIH Chest X-ray and CheXpert datasets show that our model achieves consistent improvements over the state-of-the-art methods.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering
Mar 05, 2021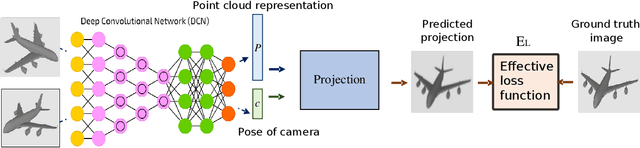
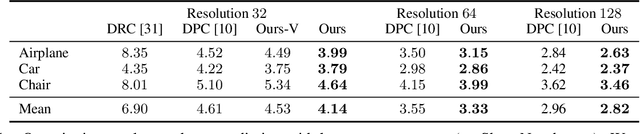
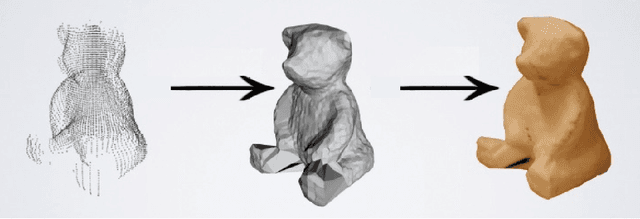

Differentiable rendering is a very successful technique that applies to a Single-View 3D Reconstruction. Current renderers use losses based on pixels between a rendered image of some 3D reconstructed object and ground-truth images from given matched viewpoints to optimise parameters of the 3D shape. These models require a rendering step, along with visibility handling and evaluation of the shading model. The main goal of this paper is to demonstrate that we can avoid these steps and still get reconstruction results as other state-of-the-art models that are equal or even better than existing category-specific reconstruction methods. First, we use the same CNN architecture for the prediction of a point cloud shape and pose prediction like the one used by Insafutdinov \& Dosovitskiy. Secondly, we propose the novel effective loss function that evaluates how well the projections of reconstructed 3D point clouds cover the ground truth object's silhouette. Then we use Poisson Surface Reconstruction to transform the reconstructed point cloud into a 3D mesh. Finally, we perform a GAN-based texture mapping on a particular 3D mesh and produce a textured 3D mesh from a single 2D image. We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
Cybersecurity Threats in Connected and Automated Vehicles based Federated Learning Systems
Feb 26, 2021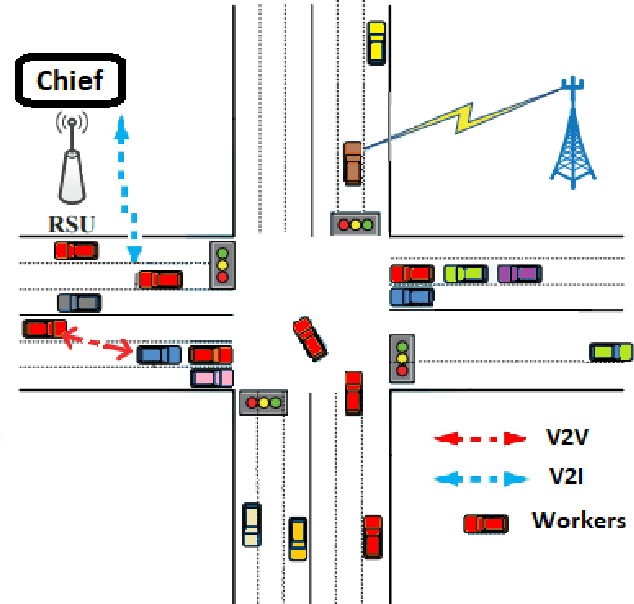
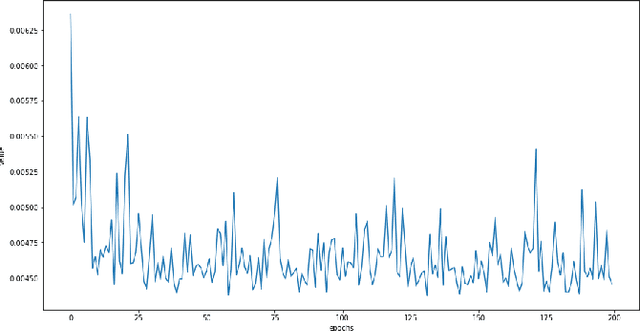
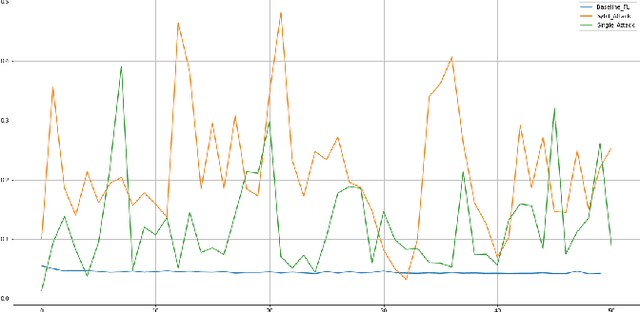
Federated learning (FL) is a machine learning technique that aims at training an algorithm across decentralized entities holding their local data private. Wireless mobile networks allow users to communicate with other fixed or mobile users. The road traffic network represents an infrastructure-based configuration of a wireless mobile network where the Connected and Automated Vehicles (CAV) represent the communicating entities. Applying FL in a wireless mobile network setting gives rise to a new threat in the mobile environment that is very different from the traditional fixed networks. The threat is due to the intrinsic characteristics of the wireless medium and is caused by the characteristics of the vehicular networks such as high node-mobility and rapidly changing topology. Most cyber defense techniques depend on highly reliable and connected networks. This paper explores falsified information attacks, which target the FL process that is ongoing at the RSU. We identified a number of attack strategies conducted by the malicious CAVs to disrupt the training of the global model in vehicular networks. We show that the attacks were able to increase the convergence time and decrease the accuracy the model. We demonstrate that our attacks bypass FL defense strategies in their primary form and highlight the need for novel poisoning resilience defense mechanisms in the wireless mobile setting of the future road networks.
Baseline Pruning-Based Approach to Trojan Detection in Neural Networks
Jan 22, 2021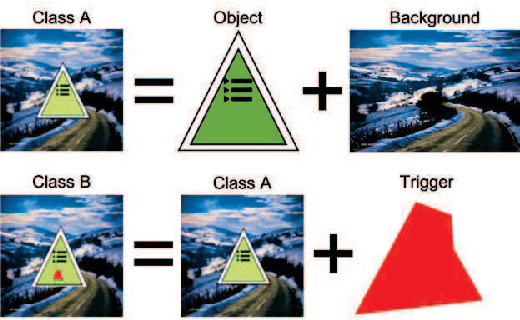

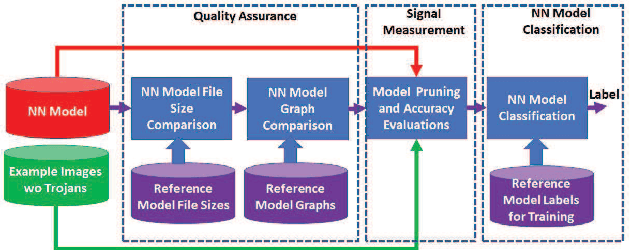

This paper addresses the problem of detecting trojans in neural networks (NNs) by analyzing systematically pruned NN models. Our pruning-based approach consists of three main steps. First, detect any deviations from the reference look-up tables of model file sizes and model graphs. Next, measure the accuracy of a set of systematically pruned NN models following multiple pruning schemas. Finally, classify a NN model as clean or poisoned by applying a mapping between accuracy measurements and NN model labels. This work outlines a theoretical and experimental framework for finding the optimal mapping over a large search space of pruning parameters. Based on our experiments using Round 1 and Round 2 TrojAI Challenge datasets, the approach achieves average classification accuracy of 69.73 % and 82.41% respectively with an average processing time of less than 60 s per model. For both datasets random guessing would produce 50% classification accuracy. Reference model graphs and source code are available from GitHub.