 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
STOPPAGE: Spatio-temporal Data Driven Cloud-Fog-Edge Computing Framework for Pandemic Monitoring and Management
Apr 04, 2021
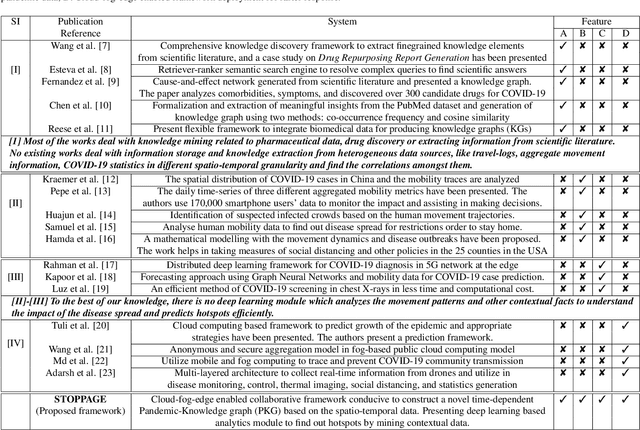
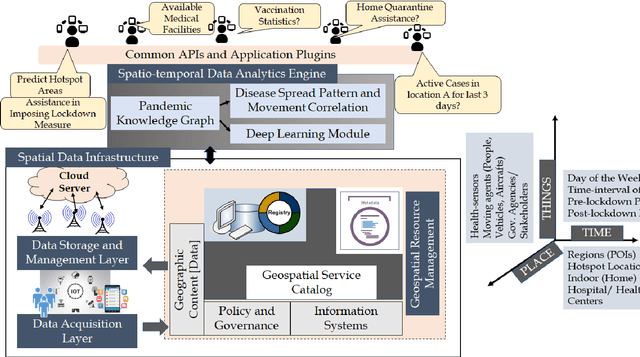
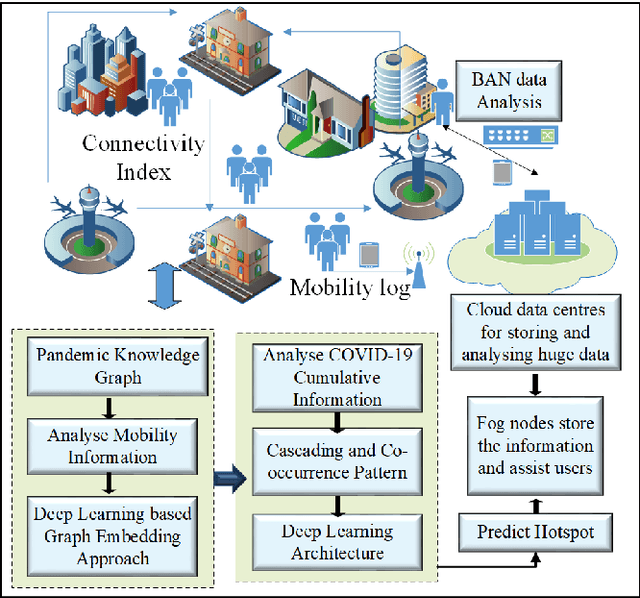
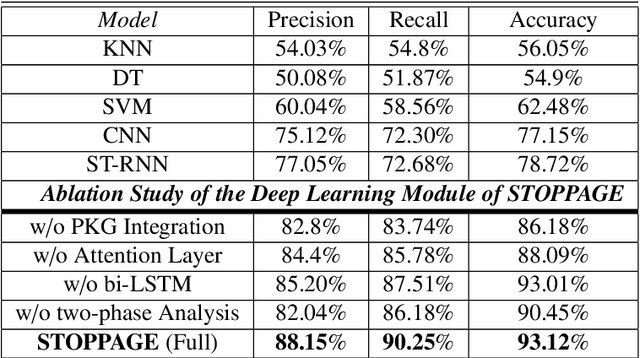
Several researches and evidence show the increasing likelihood of pandemics (large-scale outbreaks of infectious disease) which has far reaching sequels in all aspects of human lives ranging from rapid mortality rates to economic and social disruption across the world. In the recent time, COVID-19 (Coronavirus Disease 2019) pandemic disrupted normal human lives, and motivated by the urgent need of combating COVID-19, researchers have put significant efforts in modelling and analysing the disease spread patterns for effective preventive measures (in addition to developing pharmaceutical solutions, like vaccine). In this regards, it is absolutely necessary to develop an analytics framework by extracting and incorporating the knowledge of heterogeneous datasources to deliver insights in improving administrative policy and enhance the preparedness to combat the pandemic. Specifically, human mobility, travel history and other transport statistics have significant impacts on the spread of any infectious disease. In this direction, this paper proposes a spatio-temporal knowledge mining framework, named STOPPAGE to model the impact of human mobility and other contextual information over large geographic area in different temporal scales. The framework has two major modules: (i) Spatio-temporal data and computing infrastructure using fog/edge based architecture; and (ii) Spatio-temporal data analytics module to efficiently extract knowledge from heterogeneous data sources. Typically, we develop a Pandemic-knowledge graph to discover correlations among mobility information and disease spread, a deep learning architecture to predict the next hot-spot zones; and provide necessary support in home-health monitoring utilizing Femtolet and fog/edge based solutions. The experimental evaluations on real-life datasets related to COVID-19 in India illustrate the efficacy of the proposed methods.
A Regret bound for Non-stationary Multi-Armed Bandits with Fairness Constraints
Dec 24, 2020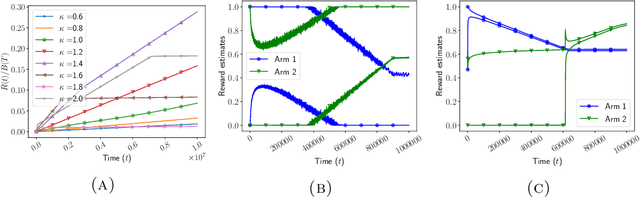
The multi-armed bandits' framework is the most common platform to study strategies for sequential decision-making problems. Recently, the notion of fairness has attracted a lot of attention in the machine learning community. One can impose the fairness condition that at any given point of time, even during the learning phase, a poorly performing candidate should not be preferred over a better candidate. This fairness constraint is known to be one of the most stringent and has been studied in the stochastic multi-armed bandits' framework in a stationary setting for which regret bounds have been established. The main aim of this paper is to study this problem in a non-stationary setting. We present a new algorithm called Fair Upper Confidence Bound with Exploration Fair-UCBe algorithm for solving a slowly varying stochastic $k$-armed bandit problem. With this we present two results: (i) Fair-UCBe indeed satisfies the above mentioned fairness condition, and (ii) it achieves a regret bound of $O\left(k^{\frac{3}{2}} T^{1 - \frac{\alpha}{2}} \sqrt{\log T}\right)$, for some suitable $\alpha \in (0, 1)$, where $T$ is the time horizon. This is the first fair algorithm with a sublinear regret bound applicable to non-stationary bandits to the best of our knowledge. We show that the performance of our algorithm in the non-stationary case approaches that of its stationary counterpart as the variation in the environment tends to zero.
A Multi-View Approach To Audio-Visual Speaker Verification
Feb 11, 2021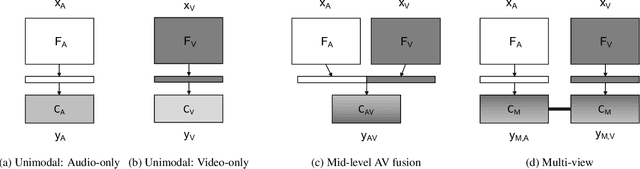
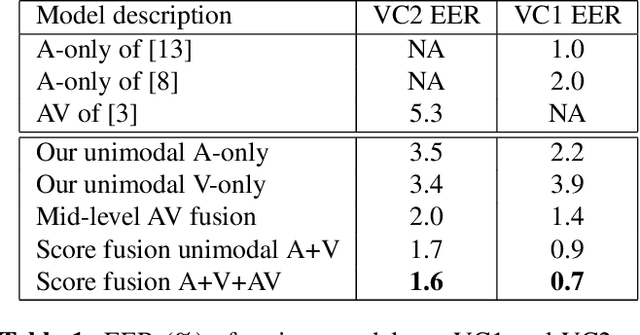
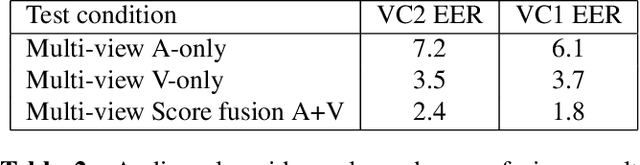
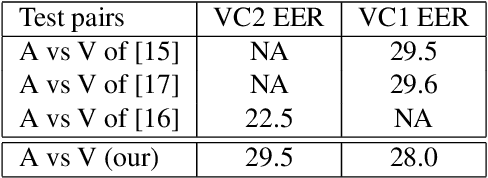
Although speaker verification has conventionally been an audio-only task, some practical applications provide both audio and visual streams of input. In these cases, the visual stream provides complementary information and can often be leveraged in conjunction with the acoustics of speech to improve verification performance. In this study, we explore audio-visual approaches to speaker verification, starting with standard fusion techniques to learn joint audio-visual (AV) embeddings, and then propose a novel approach to handle cross-modal verification at test time. Specifically, we investigate unimodal and concatenation based AV fusion and report the lowest AV equal error rate (EER) of 0.7% on the VoxCeleb1 dataset using our best system. As these methods lack the ability to do cross-modal verification, we introduce a multi-view model which uses a shared classifier to map audio and video into the same space. This new approach achieves 28% EER on VoxCeleb1 in the challenging testing condition of cross-modal verification.
CheckSoft : A Scalable Event-Driven Software Architecture for Keeping Track of People and Things in People-Centric Spaces
Feb 21, 2021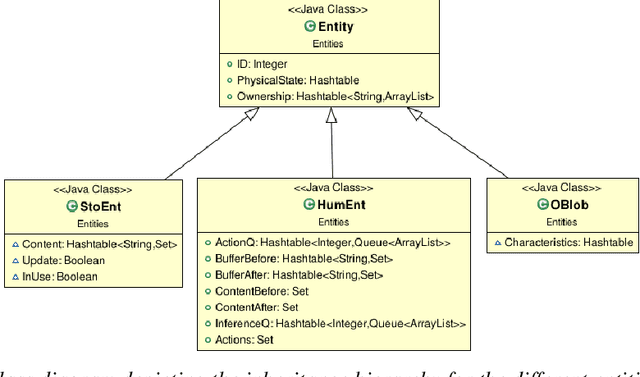
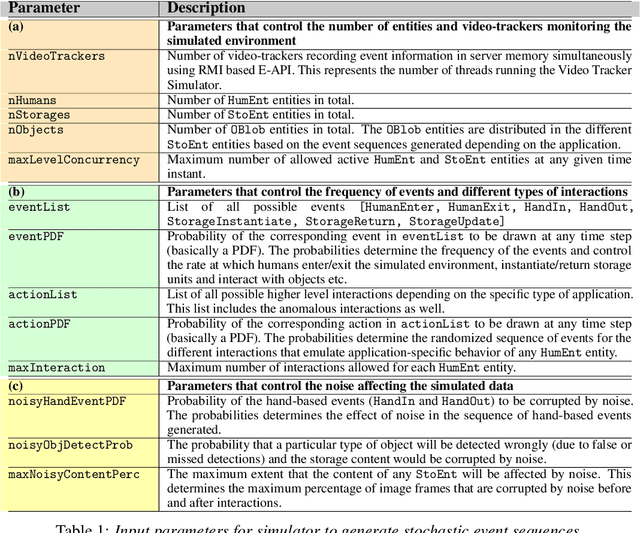
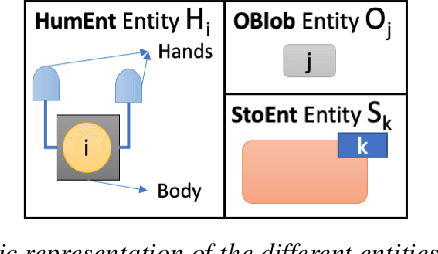
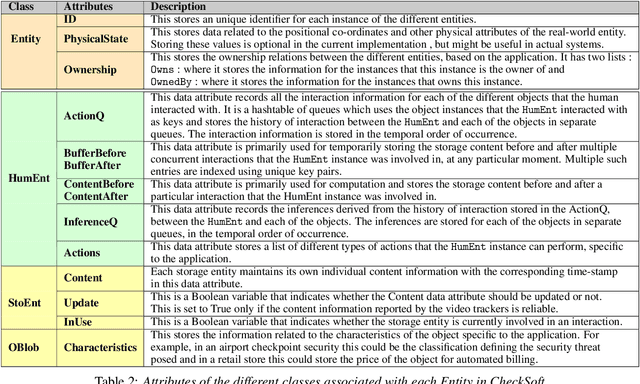
We present CheckSoft, a scalable event-driven software architecture for keeping track of people-object interactions in people-centric applications such as airport checkpoint security areas, automated retail stores, smart libraries, and so on. The architecture works off the video data generated in real time by a network of surveillance cameras. Although there are many different aspects to automating these applications, the most difficult part of the overall problem is keeping track of the interactions between the people and the objects. CheckSoft uses finite-state-machine (FSM) based logic for keeping track of such interactions which allows the system to quickly reject any false detections of the interactions by the video cameras. CheckSoft is easily scalable since the architecture is based on multi-processing in which a separate process is assigned to each human and to each "storage container" for the objects. A storage container may be a shelf on which the objects are displayed or a bin in which the objects are stored, depending on the specific application in which CheckSoft is deployed.
Real-Time Referring Expression Comprehension by Single-Stage Grounding Network
Dec 09, 2018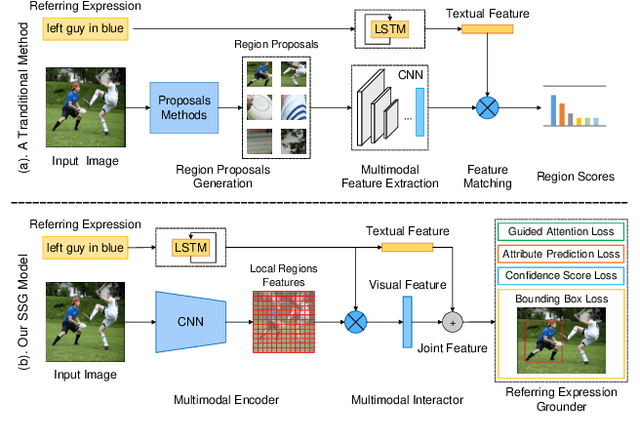
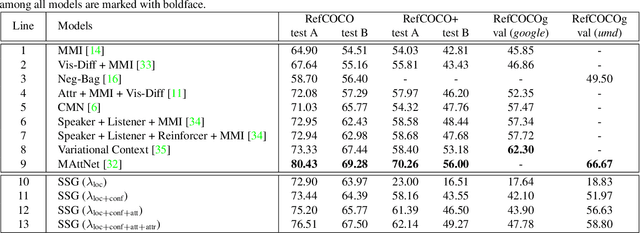
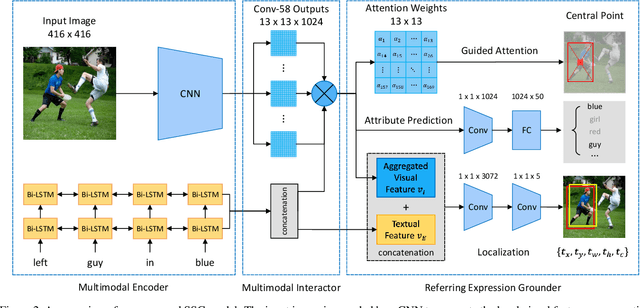
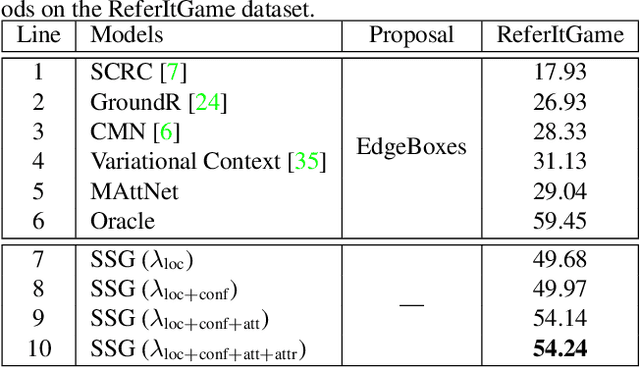
In this paper, we propose a novel end-to-end model, namely Single-Stage Grounding network (SSG), to localize the referent given a referring expression within an image. Different from previous multi-stage models which rely on object proposals or detected regions, our proposed model aims to comprehend a referring expression through one single stage without resorting to region proposals as well as the subsequent region-wise feature extraction. Specifically, a multimodal interactor is proposed to summarize the local region features regarding the referring expression attentively. Subsequently, a grounder is proposed to localize the referring expression within the given image directly. For further improving the localization accuracy, a guided attention mechanism is proposed to enforce the grounder to focus on the central region of the referent. Moreover, by exploiting and predicting visual attribute information, the grounder can further distinguish the referent objects within an image and thereby improve the model performance. Experiments on RefCOCO, RefCOCO+, and RefCOCOg datasets demonstrate that our proposed SSG without relying on any region proposals can achieve comparable performance with other advanced models. Furthermore, our SSG outperforms the previous models and achieves the state-of-art performance on the ReferItGame dataset. More importantly, our SSG is time efficient and can ground a referring expression in a 416*416 image from the RefCOCO dataset in 25ms (40 referents per second) on average with a Nvidia Tesla P40, accomplishing more than 9* speedups over the existing multi-stage models.
Three-Dimensional Virtual Histology in Unprocessed Resected Tissues with Photoacoustic Remote Sensing (PARS) Microscopy and Optical Coherence Tomography
Mar 01, 2021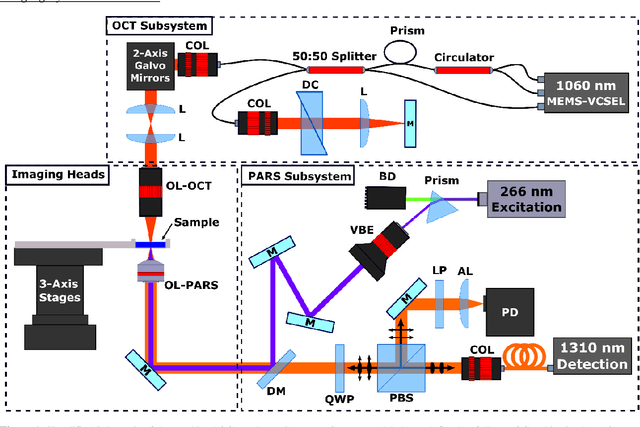
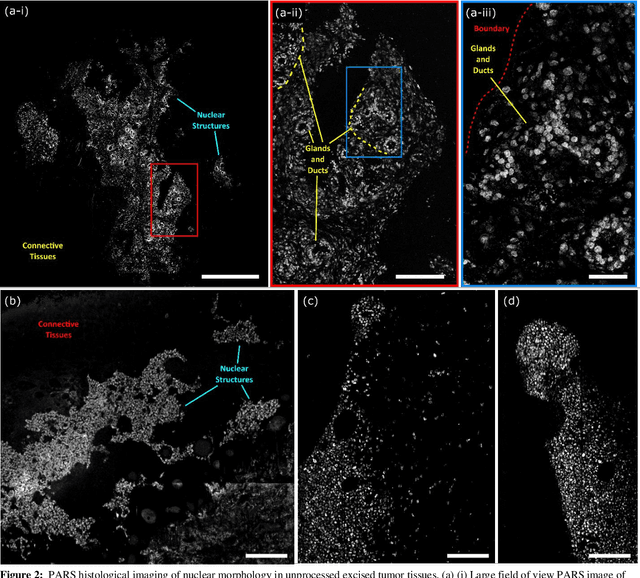
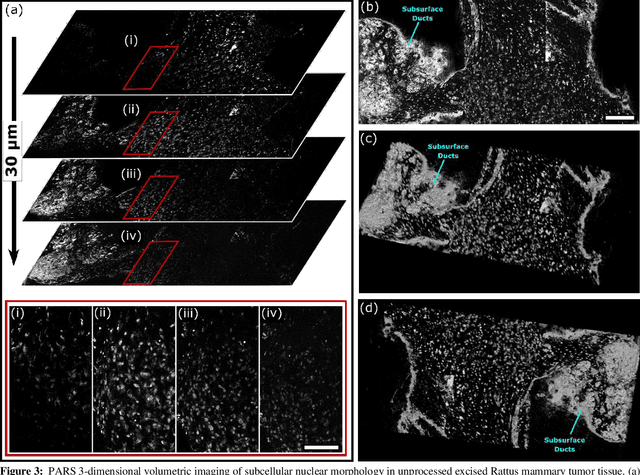
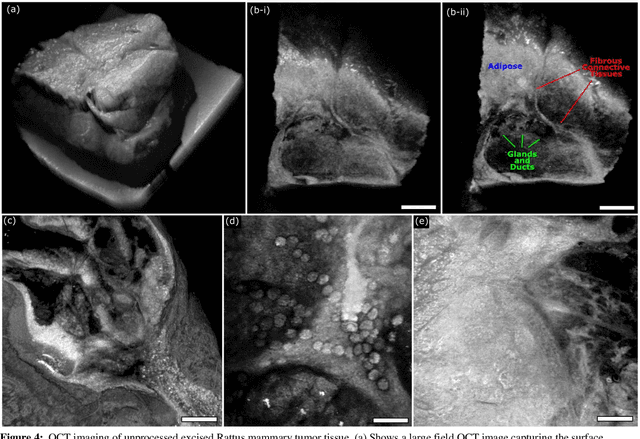
Histological visualizations are critical in the diagnosis and treatment of cancers and other malignancies. Unfortunately, the current method for capturing these visualizations requires resource intensive tissue preparation which can delay diagnostics for weeks. To streamline this process, clinicians are limited to assessing small macroscopically representative subsets of tissues. Here, we present a conjoined photoacoustic remote sensing (PARS) microscope and swept source optical coherence tomography (SS-OCT) system aiming to circumvent these diagnostic limitations. The proposed multimodal microscope provides label-free three-dimensional depth resolved virtual histology visualizations, capturing nuclear and extranuclear tissue morphology directly on thick unprocessed specimens. The capabilities of the proposed method are demonstrated directly in unprocessed formalin fixed resected tissues. Here, we present the first images of nuclear contrast in resected human tissues, and the first 3-dimensional visualization of subsurface nuclear morphology in resected Rattus tissues, captured with a non-contact photoacoustic system. Moreover, we present the first co-registered OCT and PARS images enabling direct histological assessment of unprocessed tissues. This work represents a vital step towards the development of a real-time histological imaging modality to circumvent the limitations of current histopathology techniques.
Are We Ready for Unmanned Surface Vehicles in Inland Waterways? The USVInland Multisensor Dataset and Benchmark
Mar 09, 2021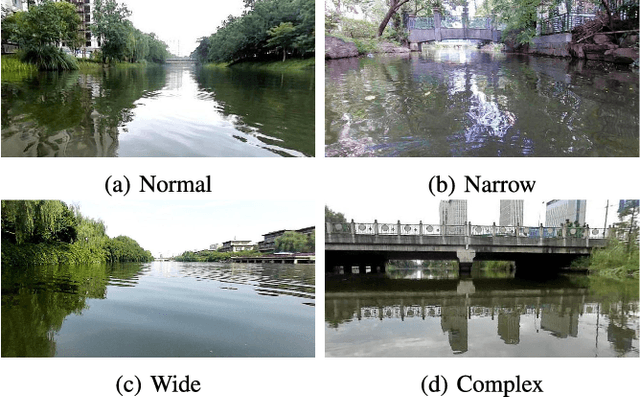
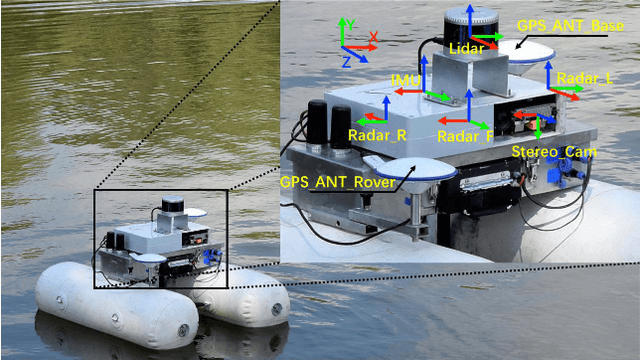
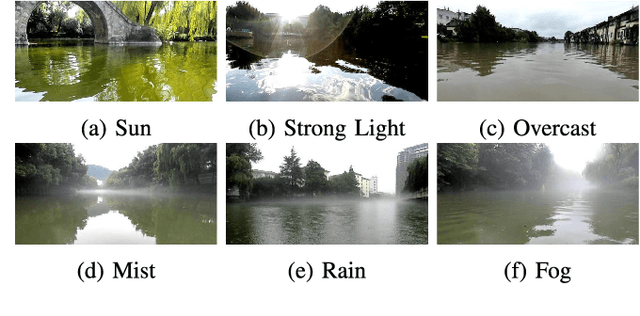
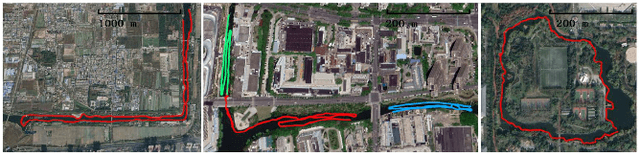
Unmanned surface vehicles (USVs) have great value with their ability to execute hazardous and time-consuming missions over water surfaces. Recently, USVs for inland waterways have attracted increasing attention for their potential application in autonomous monitoring, transportation, and cleaning. However, unlike sailing in open water, the challenges posed by scenes of inland waterways, such as the complex distribution of obstacles, the global positioning system (GPS) signal denial environment, the reflection of bank-side structures, and the fog over the water surface, all impede USV application in inland waterways. To address these problems and stimulate relevant research, we introduce USVInland, a multisensor dataset for USVs in inland waterways. The collection of USVInland spans a trajectory of more than 26 km in diverse real-world scenes of inland waterways using various modalities, including lidar, stereo cameras, millimeter-wave radar, GPS, and inertial measurement units (IMUs). Based on the requirements and challenges in the perception and navigation of USVs for inland waterways, we build benchmarks for simultaneous localization and mapping (SLAM), stereo matching, and water segmentation. We evaluate common algorithms for the above tasks to determine the influence of unique inland waterway scenes on algorithm performance. Our dataset and the development tools are available online at https://www.orca-tech.cn/datasets.html.
Analysis of Nonstationary Time Series Using Locally Coupled Gaussian Processes
Oct 31, 2016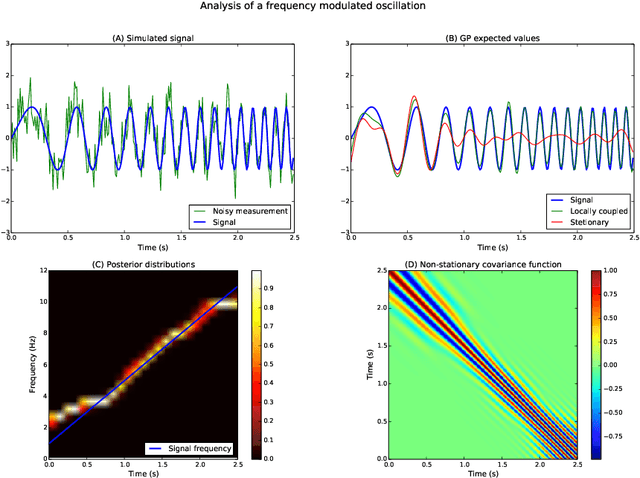
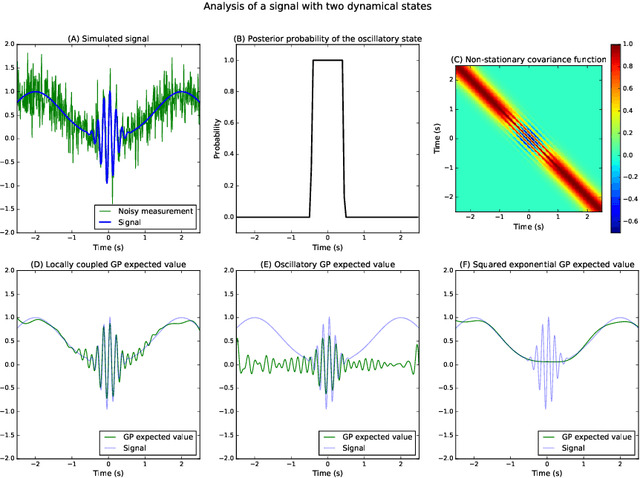
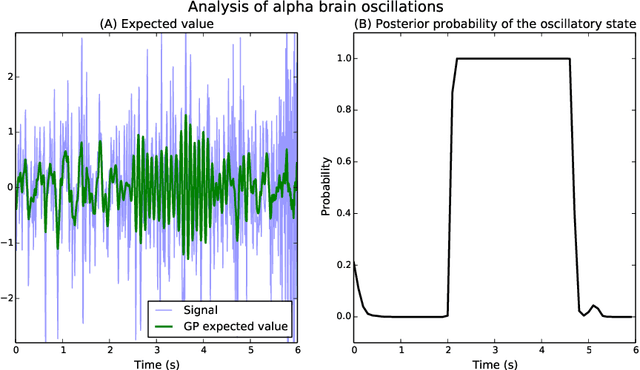
The analysis of nonstationary time series is of great importance in many scientific fields such as physics and neuroscience. In recent years, Gaussian process regression has attracted substantial attention as a robust and powerful method for analyzing time series. In this paper, we introduce a new framework for analyzing nonstationary time series using locally stationary Gaussian process analysis with parameters that are coupled through a hidden Markov model. The main advantage of this framework is that arbitrary complex nonstationary covariance functions can be obtained by combining simpler stationary building blocks whose hidden parameters can be estimated in closed-form. We demonstrate the flexibility of the method by analyzing two examples of synthetic nonstationary signals: oscillations with time varying frequency and time series with two dynamical states. Finally, we report an example application on real magnetoencephalographic measurements of brain activity.
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
Nov 05, 2020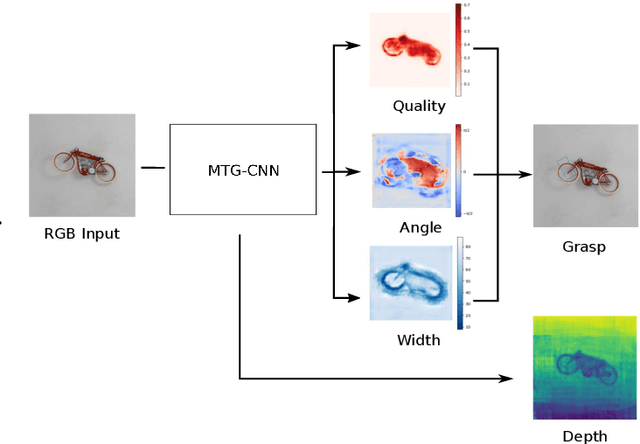
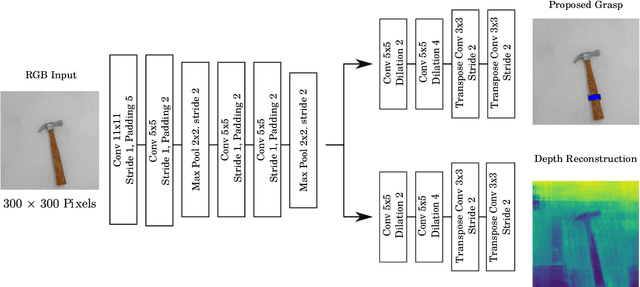
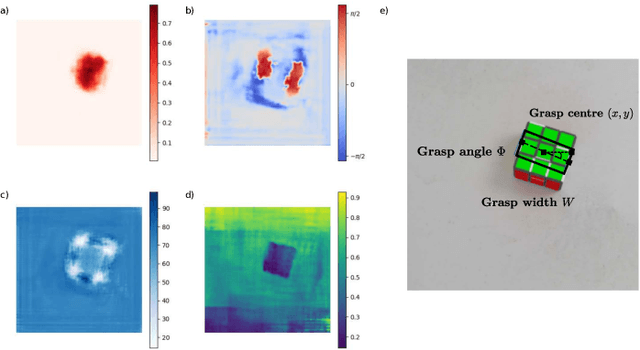
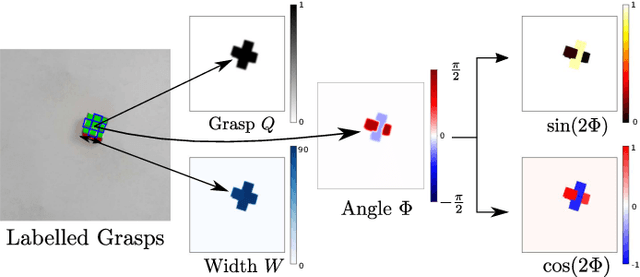
In this paper, we introduce two methods of improving real-time object grasping performance from monocular colour images in an end-to-end CNN architecture. The first is the addition of an auxiliary task during model training (multi-task learning). Our multi-task CNN model improves grasping performance from a baseline average of 72.04% to 78.14% on the large Jacquard grasping dataset when performing a supplementary depth reconstruction task. The second is introducing a positional loss function that emphasises loss per pixel for secondary parameters (gripper angle and width) only on points of an object where a successful grasp can take place. This increases performance from a baseline average of 72.04% to 78.92% as well as reducing the number of training epochs required. These methods can be also performed in tandem resulting in a further performance increase to 79.12% while maintaining sufficient inference speed to afford real-time grasp processing.
FastIF: Scalable Influence Functions for Efficient Model Interpretation and Debugging
Dec 31, 2020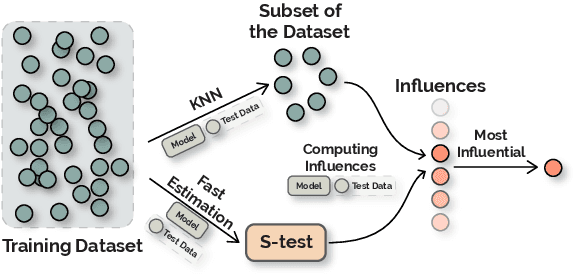

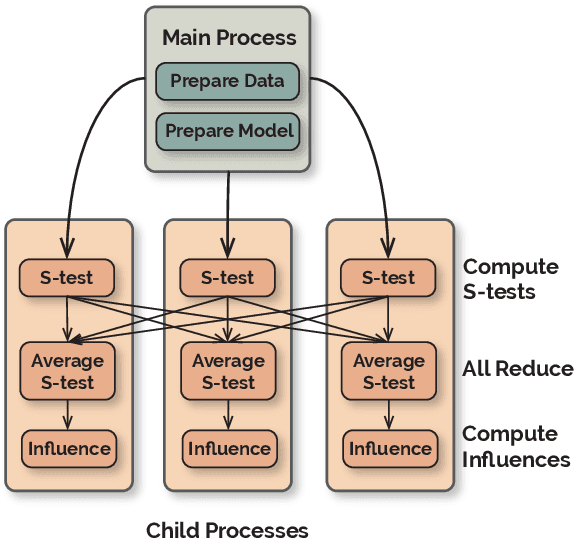
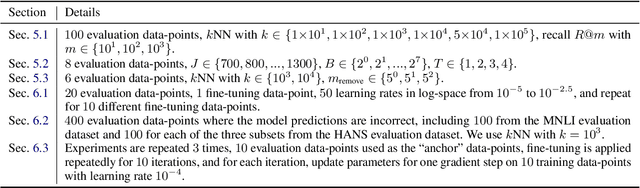
Influence functions approximate the 'influences' of training data-points for test predictions and have a wide variety of applications. Despite the popularity, their computational cost does not scale well with model and training data size. We present FastIF, a set of simple modifications to influence functions that significantly improves their run-time. We use k-Nearest Neighbors (kNN) to narrow the search space down to a subset of good candidate data points, identify the configurations that best balance the speed-quality trade-off in estimating the inverse Hessian-vector product, and introduce a fast parallel variant. Our proposed method achieves about 80x speedup while being highly correlated with the original influence values. With the availability of the fast influence functions, we demonstrate their usefulness in four applications. First, we examine whether influential data-points can 'explain' test time behavior using the framework of simulatability. Second, we visualize the influence interactions between training and test data-points. Third, we show that we can correct model errors by additional fine-tuning on certain influential data-points, improving the accuracy of a trained MNLI model by 2.6% on the HANS challenge set using a small number of gradient updates. Finally, we experiment with a data-augmentation setup where we use influence functions to search for new data-points unseen during training to improve model performance. Overall, our fast influence functions can be efficiently applied to large models and datasets, and our experiments demonstrate the potential of influence functions in model interpretation and correcting model errors. Code is available at https://github.com/salesforce/fast-influence-functions