 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Hybrid Policy Learning for Energy-Latency Tradeoff in MEC-Assisted VR Video Service
Apr 02, 2021
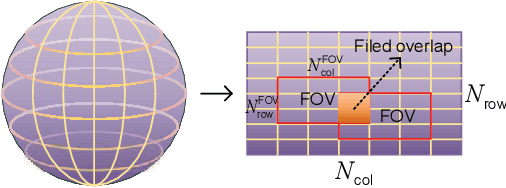
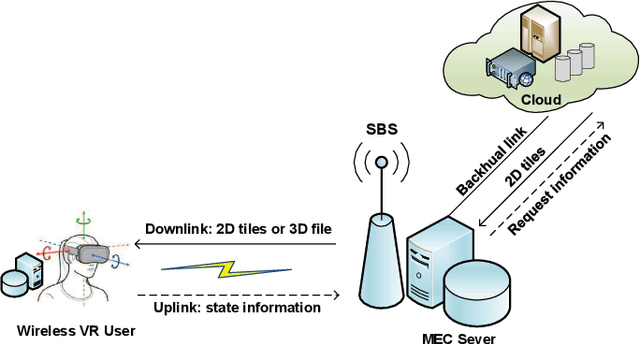
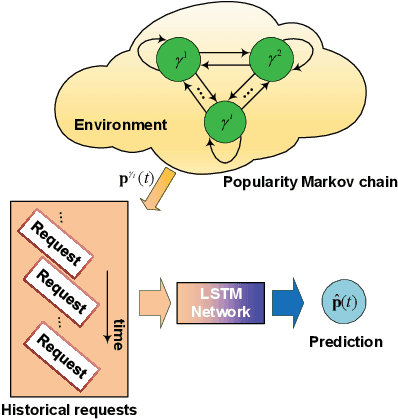
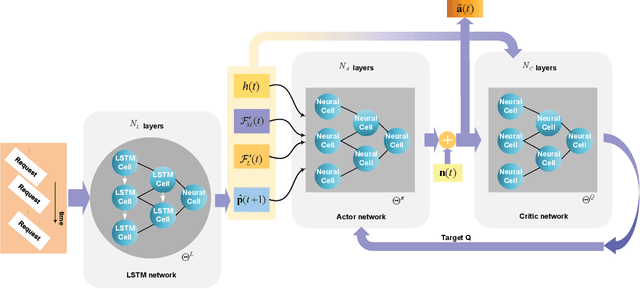
Virtual reality (VR) is promising to fundamentally transform a broad spectrum of industry sectors and the way humans interact with virtual content. However, despite unprecedented progress, current networking and computing infrastructures are incompetent to unlock VR's full potential. In this paper, we consider delivering the wireless multi-tile VR video service over a mobile edge computing (MEC) network. The primary goal is to minimize the system latency/energy consumption and to arrive at a tradeoff thereof. To this end, we first cast the time-varying view popularity as a model-free Markov chain to effectively capture its dynamic characteristics. After jointly assessing the caching and computing capacities on both the MEC server and the VR playback device, a hybrid policy is then implemented to coordinate the dynamic caching replacement and the deterministic offloading, so as to fully utilize the system resources. The underlying multi-objective problem is reformulated as a partially observable Markov decision process, and a deep deterministic policy gradient algorithm is proposed to iteratively learn its solution, where a long short-term memory neural network is embedded to continuously predict the dynamics of the unobservable popularity. Simulation results demonstrate the superiority of the proposed scheme in achieving a trade-off between the energy efficiency and the latency reduction over the baseline methods.
Distributed Deep Learning Using Volunteer Computing-Like Paradigm
Apr 02, 2021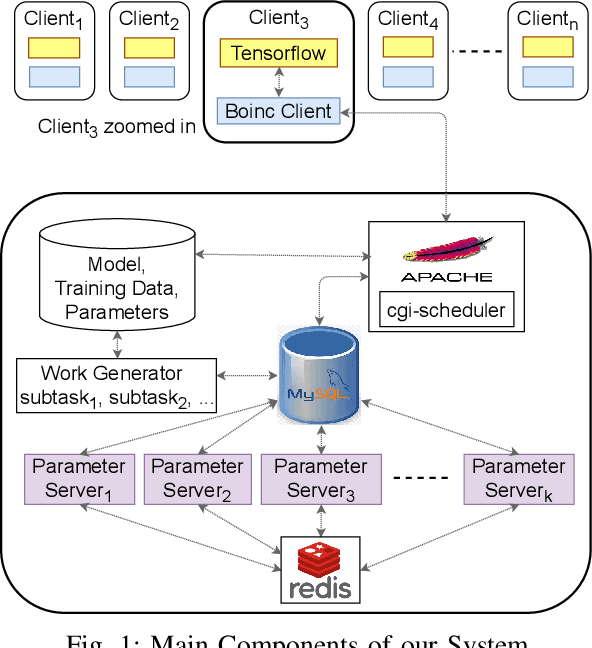
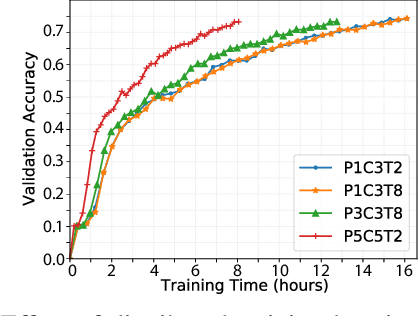
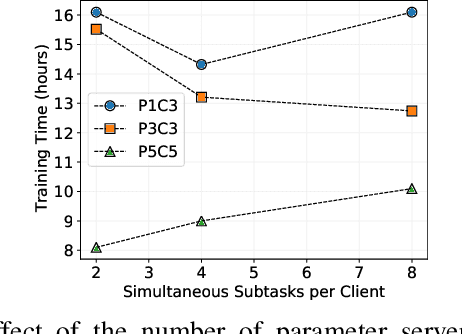
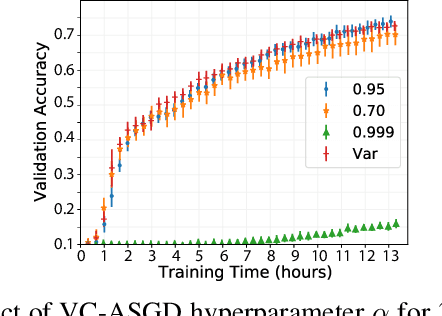
Use of Deep Learning (DL) in commercial applications such as image classification, sentiment analysis and speech recognition is increasing. When training DL models with large number of parameters and/or large datasets, cost and speed of training can become prohibitive. Distributed DL training solutions that split a training job into subtasks and execute them over multiple nodes can decrease training time. However, the cost of current solutions, built predominantly for cluster computing systems, can still be an issue. In contrast to cluster computing systems, Volunteer Computing (VC) systems can lower the cost of computing, but applications running on VC systems have to handle fault tolerance, variable network latency and heterogeneity of compute nodes, and the current solutions are not designed to do so. We design a distributed solution that can run DL training on a VC system by using a data parallel approach. We implement a novel asynchronous SGD scheme called VC-ASGD suited for VC systems. In contrast to traditional VC systems that lower cost by using untrustworthy volunteer devices, we lower cost by leveraging preemptible computing instances on commercial cloud platforms. By using preemptible instances that require applications to be fault tolerant, we lower cost by 70-90% and improve data security.
Regularized Behavior Value Estimation
Mar 17, 2021
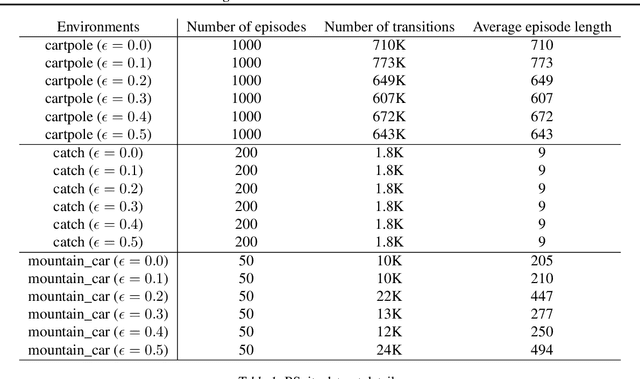
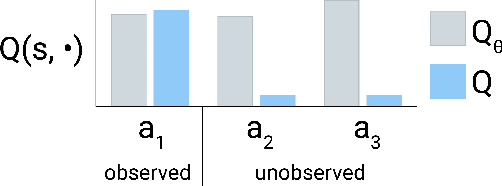
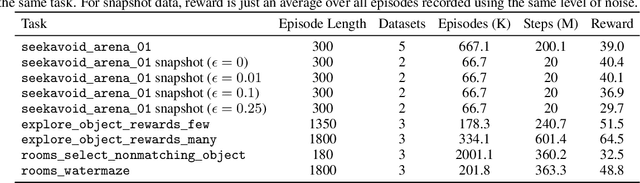
Offline reinforcement learning restricts the learning process to rely only on logged-data without access to an environment. While this enables real-world applications, it also poses unique challenges. One important challenge is dealing with errors caused by the overestimation of values for state-action pairs not well-covered by the training data. Due to bootstrapping, these errors get amplified during training and can lead to divergence, thereby crippling learning. To overcome this challenge, we introduce Regularized Behavior Value Estimation (R-BVE). Unlike most approaches, which use policy improvement during training, R-BVE estimates the value of the behavior policy during training and only performs policy improvement at deployment time. Further, R-BVE uses a ranking regularisation term that favours actions in the dataset that lead to successful outcomes. We provide ample empirical evidence of R-BVE's effectiveness, including state-of-the-art performance on the RL Unplugged ATARI dataset. We also test R-BVE on new datasets, from bsuite and a challenging DeepMind Lab task, and show that R-BVE outperforms other state-of-the-art discrete control offline RL methods.
Quarter Laplacian Filter for Edge Aware Image Processing
Jan 20, 2021
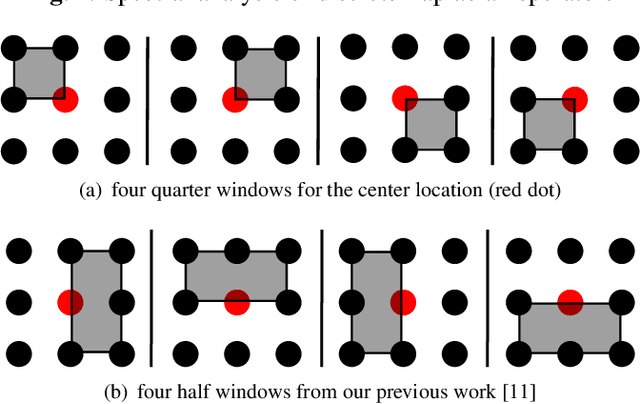
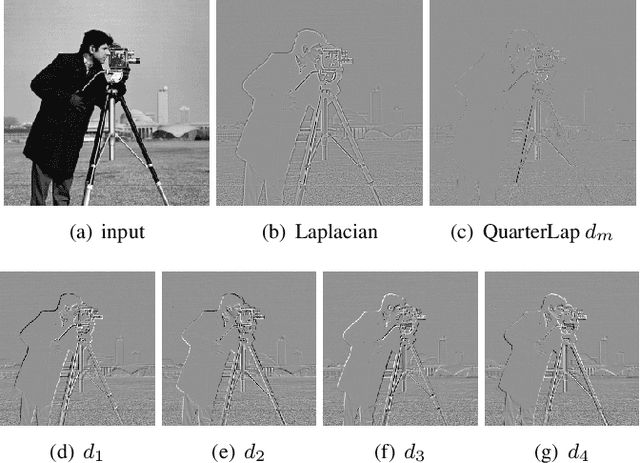
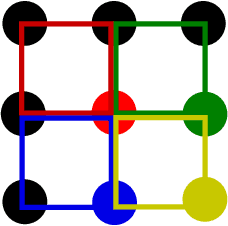
This paper presents a quarter Laplacian filter that can preserve corners and edges during image smoothing. Its support region is $2\times2$, which is smaller than the $3\times3$ support region of Laplacian filter. Thus, it is more local. Moreover, this filter can be implemented via the classical box filter, leading to high performance for real time applications. Finally, we show its edge preserving property in several image processing tasks, including image smoothing, texture enhancement, and low-light image enhancement. The proposed filter can be adopted in a wide range of image processing applications.
MONAH: Multi-Modal Narratives for Humans to analyze conversations
Jan 20, 2021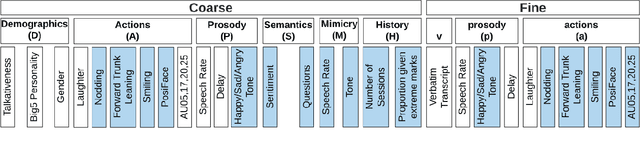
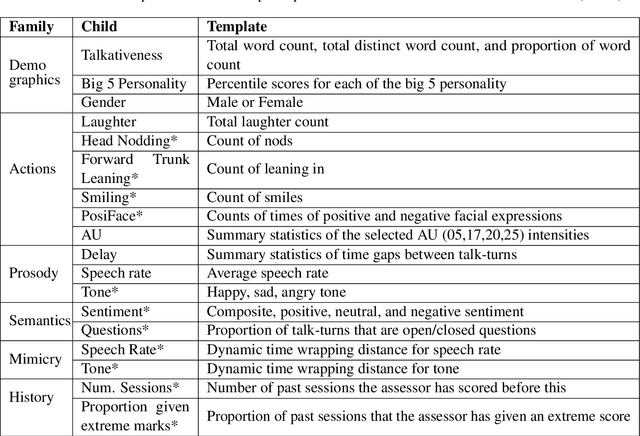
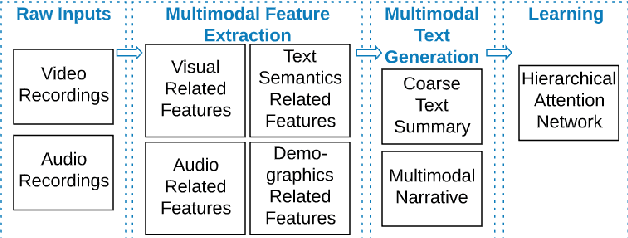
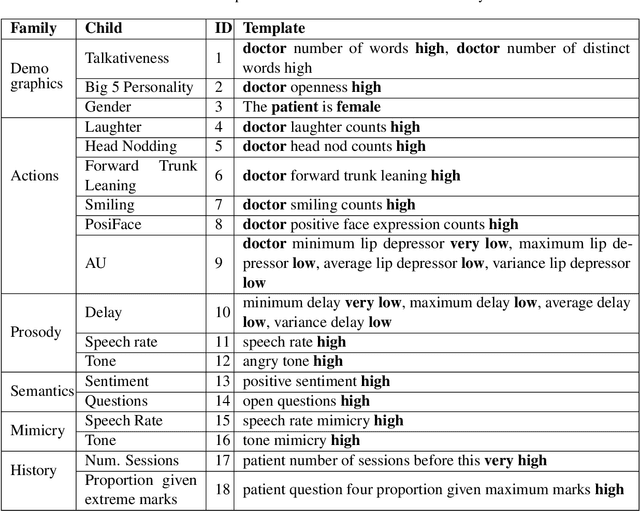
In conversational analyses, humans manually weave multimodal information into the transcripts, which is significantly time-consuming. We introduce a system that automatically expands the verbatim transcripts of video-recorded conversations using multimodal data streams. This system uses a set of preprocessing rules to weave multimodal annotations into the verbatim transcripts and promote interpretability. Our feature engineering contributions are two-fold: firstly, we identify the range of multimodal features relevant to detect rapport-building; secondly, we expand the range of multimodal annotations and show that the expansion leads to statistically significant improvements in detecting rapport-building.
Online Informative Path Planning for Active Information Gathering of a 3D Surface
Mar 17, 2021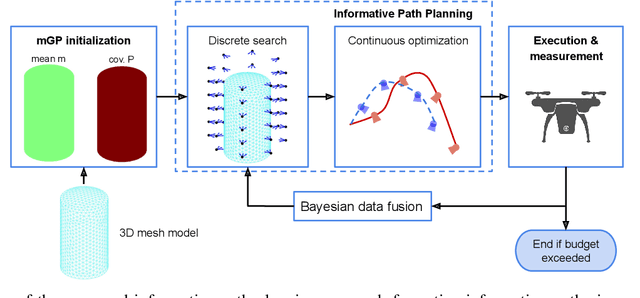
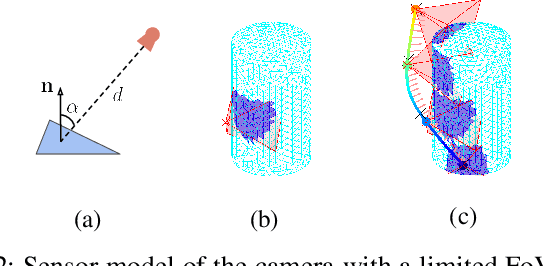
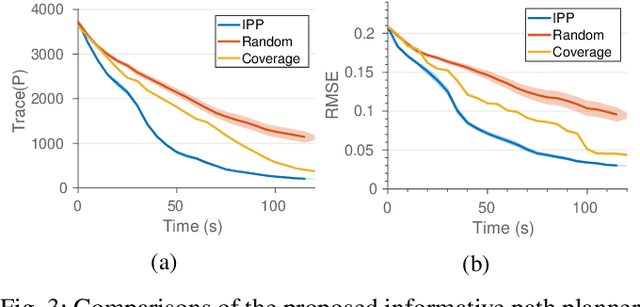
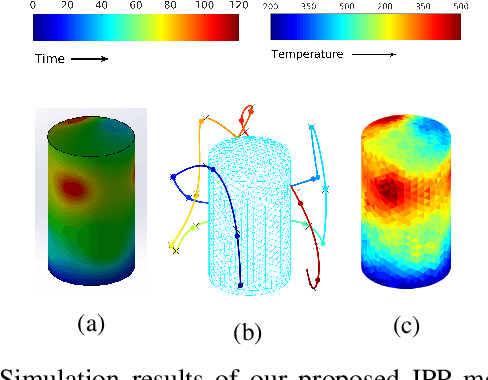
This paper presents an online informative path planning approach for active information gathering on three-dimensional surfaces using aerial robots. Most existing works on surface inspection focus on planning a path offline that can provide full coverage of the surface, which inherently assumes the surface information is uniformly distributed hence ignoring potential spatial correlations of the information field. In this paper, we utilize manifold Gaussian processes (mGPs) with geodesic kernel functions for mapping surface information fields and plan informative paths online in a receding horizon manner. Our approach actively plans information-gathering paths based on recent observations that respect dynamic constraints of the vehicle and a total flight time budget. We provide planning results for simulated temperature modeling for simple and complex 3D surface geometries (a cylinder and an aircraft model). We demonstrate that our informative planning method outperforms traditional approaches such as 3D coverage planning and random exploration, both in reconstruction error and information-theoretic metrics. We also show that by taking spatial correlations of the information field into planning using mGPs, the information gathering efficiency is significantly improved.
Conditional Meta-Network for Blind Super-Resolution with Multiple Degradations
Apr 09, 2021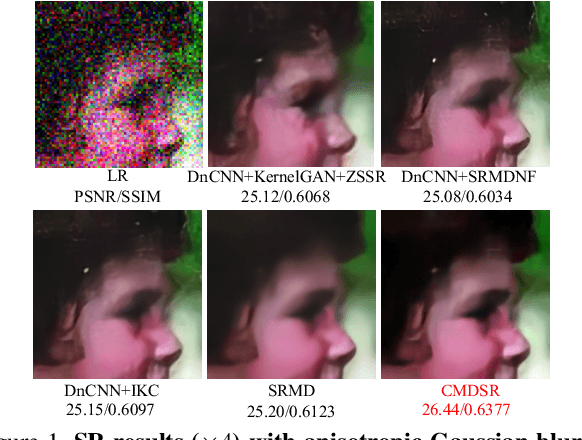


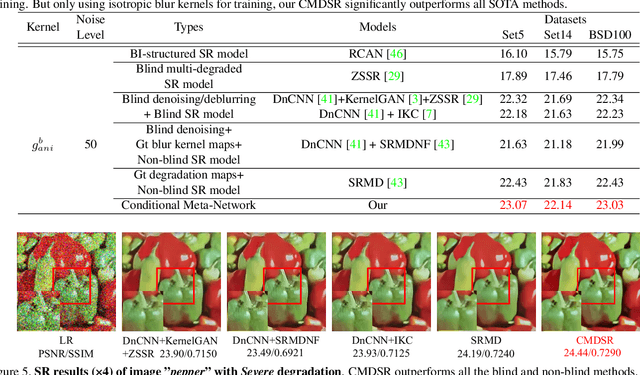
Although single-image super-resolution (SISR) methods have achieved great success on single degradation, they still suffer performance drop with multiple degrading effects in real scenarios. Recently, some blind and non-blind models for multiple degradations have been explored. However, those methods usually degrade significantly for distribution shifts between the training and test data. Towards this end, we propose a conditional meta-network framework (named CMDSR) for the first time, which helps SR framework learn how to adapt to changes in input distribution. We extract degradation prior at task-level with the proposed ConditionNet, which will be used to adapt the parameters of the basic SR network (BaseNet). Specifically, the ConditionNet of our framework first learns the degradation prior from a support set, which is composed of a series of degraded image patches from the same task. Then the adaptive BaseNet rapidly shifts its parameters according to the conditional features. Moreover, in order to better extract degradation prior, we propose a task contrastive loss to decrease the inner-task distance and increase the cross-task distance between task-level features. Without predefining degradation maps, our blind framework can conduct one single parameter update to yield considerable SR results. Extensive experiments demonstrate the effectiveness of CMDSR over various blind, even non-blind methods. The flexible BaseNet structure also reveals that CMDSR can be a general framework for large series of SISR models.
Nearly Horizon-Free Offline Reinforcement Learning
Mar 25, 2021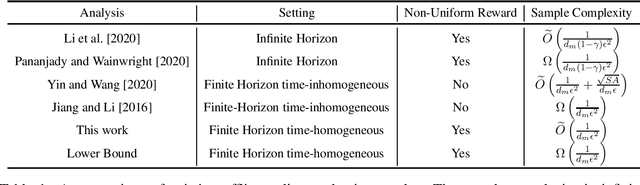
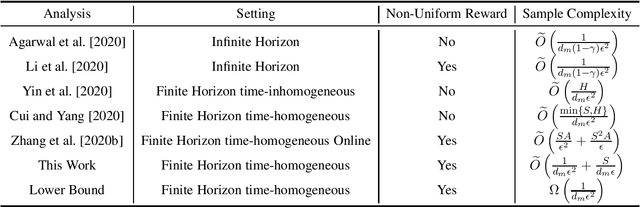
We revisit offline reinforcement learning on episodic time-homogeneous tabular Markov Decision Processes with $S$ states, $A$ actions and planning horizon $H$. Given the collected $N$ episodes data with minimum cumulative reaching probability $d_m$, we obtain the first set of nearly $H$-free sample complexity bounds for evaluation and planning using the empirical MDPs: 1.For the offline evaluation, we obtain an $\tilde{O}\left(\sqrt{\frac{1}{Nd_m}} \right)$ error rate, which matches the lower bound and does not have additional dependency on $\poly\left(S,A\right)$ in higher-order term, that is different from previous works~\citep{yin2020near,yin2020asymptotically}. 2.For the offline policy optimization, we obtain an $\tilde{O}\left(\sqrt{\frac{1}{Nd_m}} + \frac{S}{Nd_m}\right)$ error rate, improving upon the best known result by \cite{cui2020plug}, which has additional $H$ and $S$ factors in the main term. Furthermore, this bound approaches the $\Omega\left(\sqrt{\frac{1}{Nd_m}}\right)$ lower bound up to logarithmic factors and a high-order term. To the best of our knowledge, these are the first set of nearly horizon-free bounds in offline reinforcement learning.
IntentNet: Learning to Predict Intention from Raw Sensor Data
Jan 20, 2021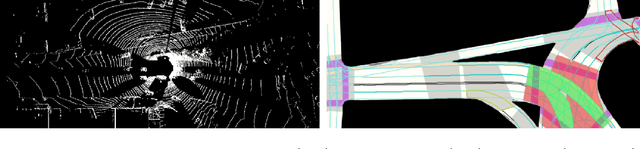
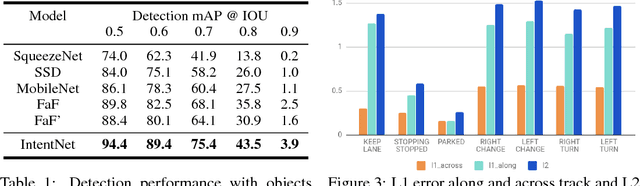
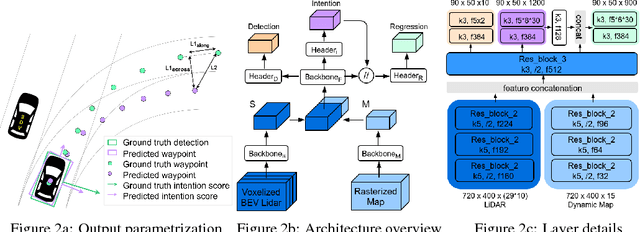
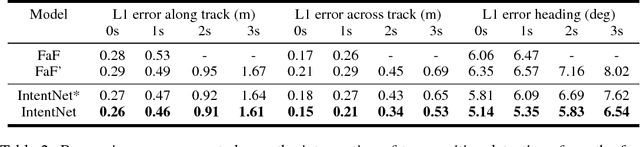
In order to plan a safe maneuver, self-driving vehicles need to understand the intent of other traffic participants. We define intent as a combination of discrete high-level behaviors as well as continuous trajectories describing future motion. In this paper, we develop a one-stage detector and forecaster that exploits both 3D point clouds produced by a LiDAR sensor as well as dynamic maps of the environment. Our multi-task model achieves better accuracy than the respective separate modules while saving computation, which is critical to reducing reaction time in self-driving applications.
Fast IR Drop Estimation with Machine Learning
Nov 26, 2020
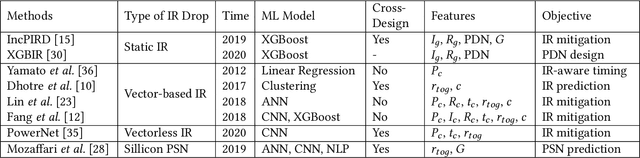


IR drop constraint is a fundamental requirement enforced in almost all chip designs. However, its evaluation takes a long time, and mitigation techniques for fixing violations may require numerous iterations. As such, fast and accurate IR drop prediction becomes critical for reducing design turnaround time. Recently, machine learning (ML) techniques have been actively studied for fast IR drop estimation due to their promise and success in many fields. These studies target at various design stages with different emphasis, and accordingly, different ML algorithms are adopted and customized. This paper provides a review to the latest progress in ML-based IR drop estimation techniques. It also serves as a vehicle for discussing some general challenges faced by ML applications in electronics design automation (EDA), and demonstrating how to integrate ML models with conventional techniques for the better efficiency of EDA tools.