 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Fundamental Limits on the Maximum Deviations in Control Systems: How Short Can Distribution Tails be Made by Feedback?
Feb 02, 2021

This paper is on the application of information theory to the analysis of fundamental lower bounds on the maximum deviations in feedback control systems, where the plant is linear time-invariant while the controller can generically be any causal functions as long as it stabilizes the plant. It is seen in general that the lower bounds are characterized by the unstable poles (or nonminimum-phase zeros) of the plant as well as the conditional entropy of the disturbance. Such bounds provide fundamental limits on how short the distribution tails in control systems can be made by feedback.
The Tags Are Alright: Robust Large-Scale RFID Clone Detection Through Federated Data-Augmented Radio Fingerprinting
May 08, 2021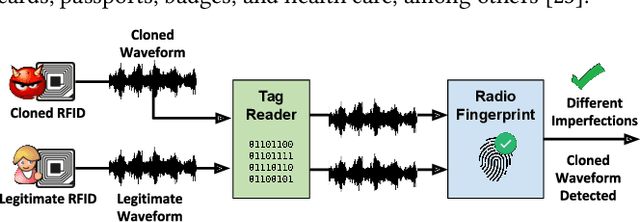
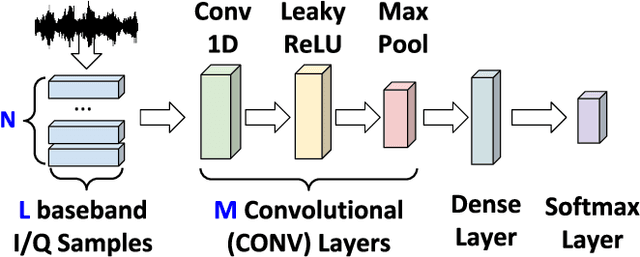
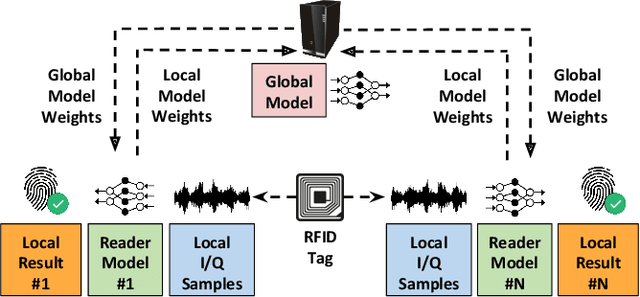
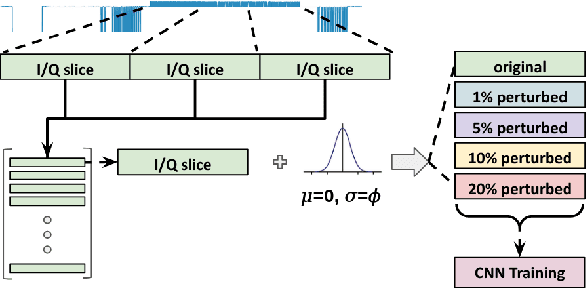
Millions of RFID tags are pervasively used all around the globe to inexpensively identify a wide variety of everyday-use objects. One of the key issues of RFID is that tags cannot use energy-hungry cryptography. For this reason, radio fingerprinting (RFP) is a compelling approach that leverages the unique imperfections in the tag's wireless circuitry to achieve large-scale RFID clone detection. Recent work, however, has unveiled that time-varying channel conditions can significantly decrease the accuracy of the RFP process. We propose the first large-scale investigation into RFP of RFID tags with dynamic channel conditions. Specifically, we perform a massive data collection campaign on a testbed composed by 200 off-the-shelf identical RFID tags and a software-defined radio (SDR) tag reader. We collect data with different tag-reader distances in an over-the-air configuration. To emulate implanted RFID tags, we also collect data with two different kinds of porcine meat inserted between the tag and the reader. We use this rich dataset to train and test several convolutional neural network (CNN)--based classifiers in a variety of channel conditions. Our investigation reveals that training and testing on different channel conditions drastically degrades the classifier's accuracy. For this reason, we propose a novel training framework based on federated machine learning (FML) and data augmentation (DAG) to boost the accuracy. Extensive experimental results indicate that (i) our FML approach improves accuracy by up to 48%; (ii) our DA approach improves the FML performance by up to 31%. To the best of our knowledge, this is the first paper experimentally demonstrating the efficacy of FML and DA on a large device population. We are sharing with the research community our fully-labeled 200-GB RFID waveform dataset, the entirety of our code and trained models.
Joint Weakly Supervised AT and AED Using Deep Feature Distillation and Adaptive Focal Loss
Mar 23, 2021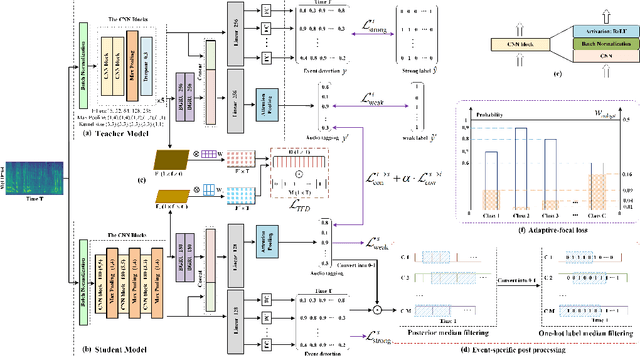
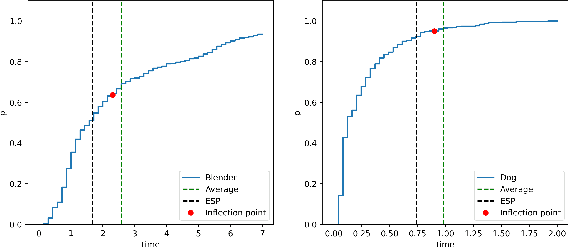
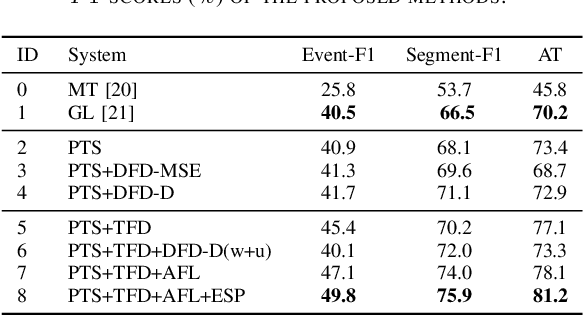
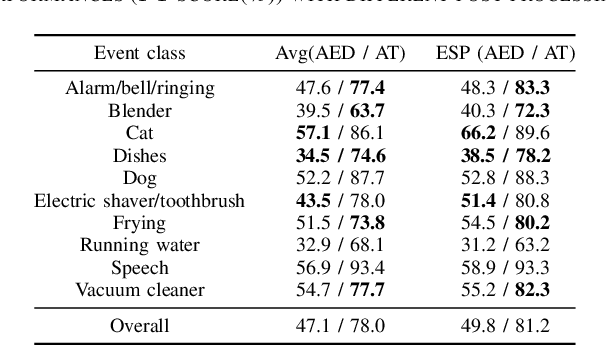
A good joint training framework is very helpful to improve the performances of weakly supervised audio tagging (AT) and acoustic event detection (AED) simultaneously. In this study, we propose three methods to improve the best teacher-student framework of DCASE2019 Task 4 for both AT and AED tasks. A frame-level target-events based deep feature distillation is first proposed, it aims to leverage the potential of limited strong-labeled data in weakly supervised framework to learn better intermediate feature maps. Then we propose an adaptive focal loss and two-stage training strategy to enable an effective and more accurate model training, in which the contribution of difficult-to-classify and easy-to-classify acoustic events to the total cost function can be automatically adjusted. Furthermore, an event-specific post processing is designed to improve the prediction of target event time-stamps. Our experiments are performed on the public DCASE2019 Task4 dataset, and results show that our approach achieves competitive performances in both AT (49.8% F1-score) and AED (81.2% F1-score) tasks.
Extending Isolation Forest for Anomaly Detection in Big Data via K-Means
Apr 27, 2021
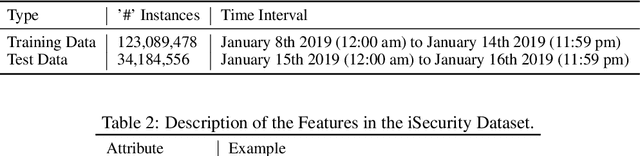
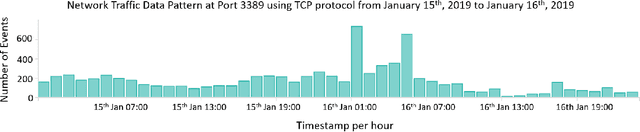
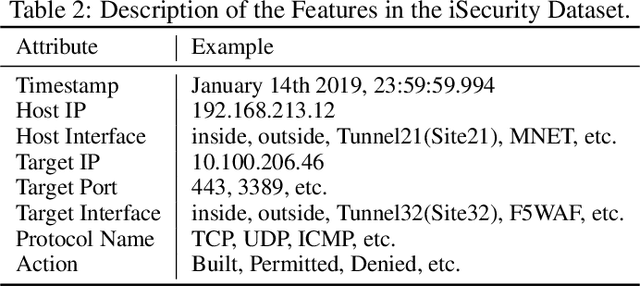
Industrial Information Technology (IT) infrastructures are often vulnerable to cyberattacks. To ensure security to the computer systems in an industrial environment, it is required to build effective intrusion detection systems to monitor the cyber-physical systems (e.g., computer networks) in the industry for malicious activities. This paper aims to build such intrusion detection systems to protect the computer networks from cyberattacks. More specifically, we propose a novel unsupervised machine learning approach that combines the K-Means algorithm with the Isolation Forest for anomaly detection in industrial big data scenarios. Since our objective is to build the intrusion detection system for the big data scenario in the industrial domain, we utilize the Apache Spark framework to implement our proposed model which was trained in large network traffic data (about 123 million instances of network traffic) stored in Elasticsearch. Moreover, we evaluate our proposed model on the live streaming data and find that our proposed system can be used for real-time anomaly detection in the industrial setup. In addition, we address different challenges that we face while training our model on large datasets and explicitly describe how these issues were resolved. Based on our empirical evaluation in different use-cases for anomaly detection in real-world network traffic data, we observe that our proposed system is effective to detect anomalies in big data scenarios. Finally, we evaluate our proposed model on several academic datasets to compare with other models and find that it provides comparable performance with other state-of-the-art approaches.
Neural Network Controller for Autonomous Pile Loading Revised
Mar 23, 2021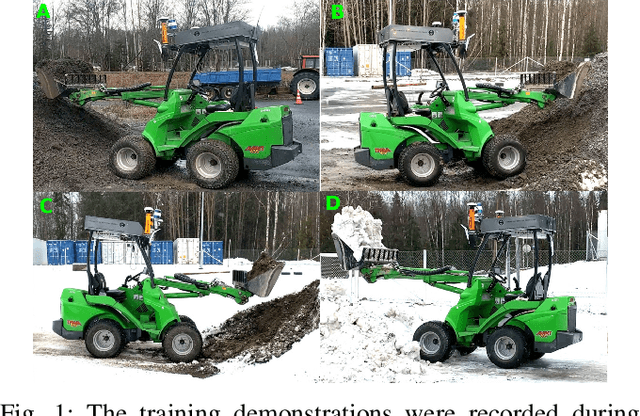
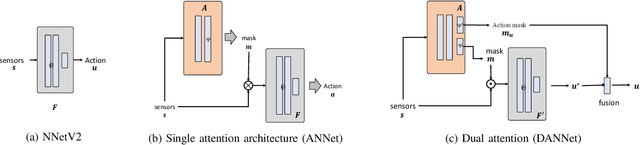
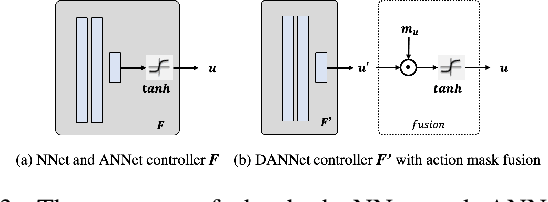
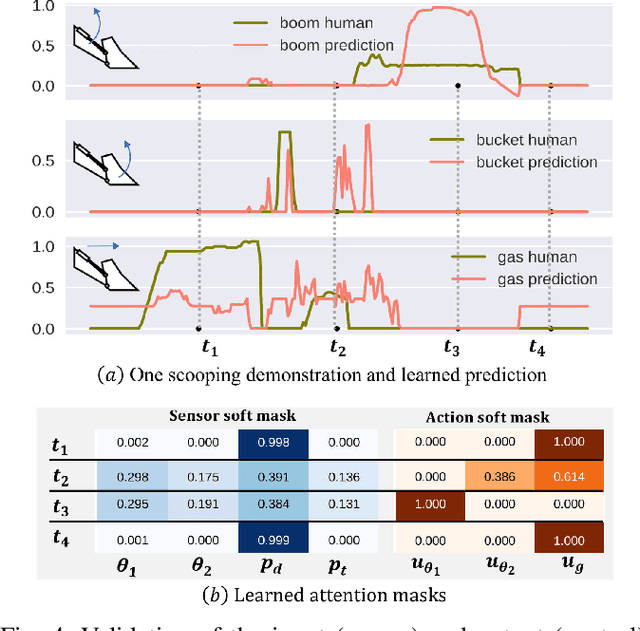
We have recently proposed two pile loading controllers that learn from human demonstrations: a neural network (NNet) [1] and a random forest (RF) controller [2]. In the field experiments the RF controller obtained clearly better success rates. In this work, the previous findings are drastically revised by experimenting summer time trained controllers in winter conditions. The winter experiments revealed a need for additional sensors, more training data, and a controller that can take advantage of these. Therefore, we propose a revised neural controller (NNetV2) which has a more expressive structure and uses a neural attention mechanism to focus on important parts of the sensor and control signals. Using the same data and sensors to train and test the three controllers, NNetV2 achieves better robustness against drastically changing conditions and superior success rate. To the best of our knowledge, this is the first work testing a learning-based controller for a heavy-duty machine in drastically varying outdoor conditions and delivering high success rate in winter, being trained in summer.
MOAI: A methodology for evaluating the impact of indoor airflow in the transmission of COVID-19
Mar 31, 2021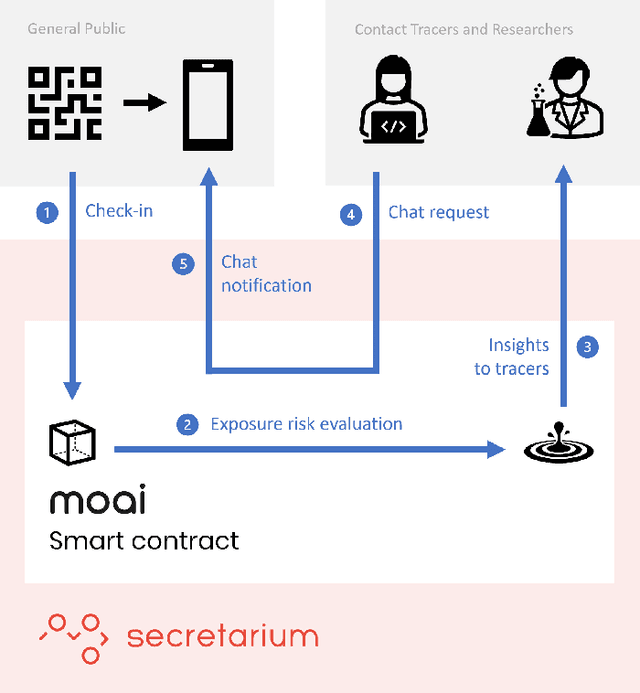
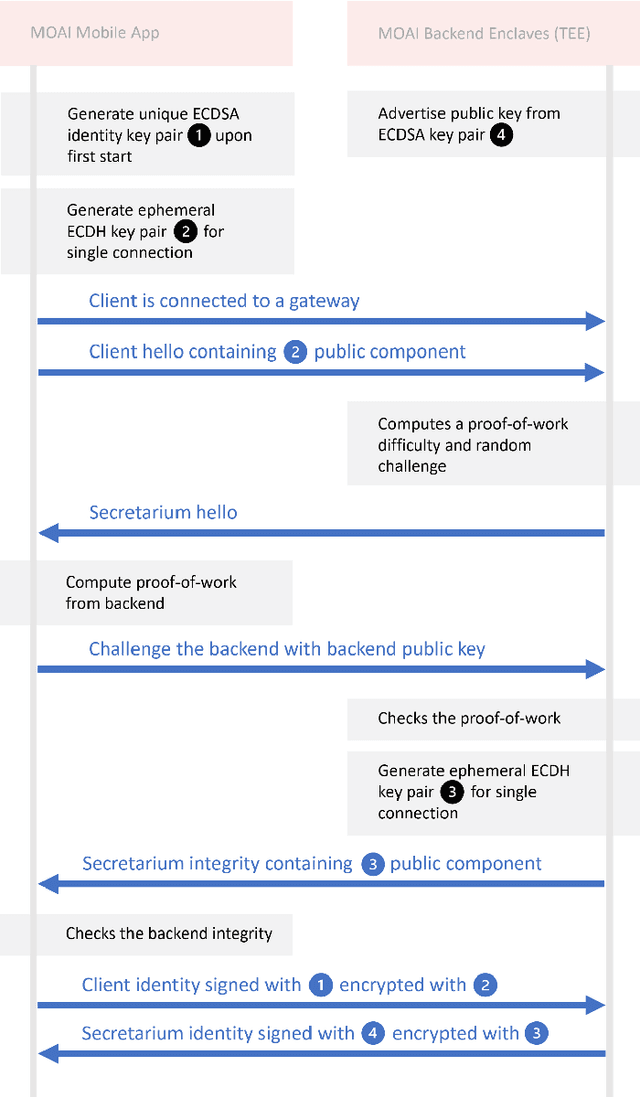
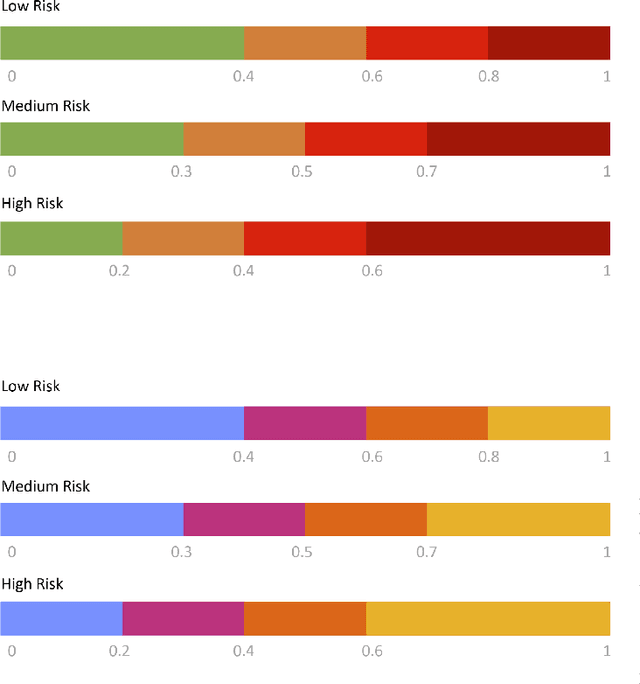
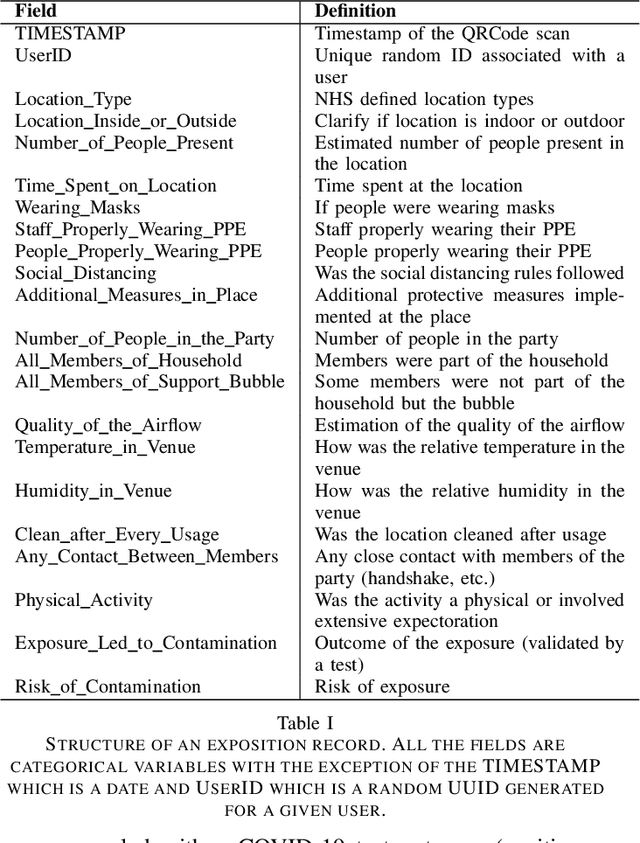
Epidemiology models play a key role in understanding and responding to the COVID-19 pandemic. In order to build those models, scientists need to understand contributing factors and their relative importance. A large strand of literature has identified the importance of airflow to mitigate droplets and far-field aerosol transmission risks. However, the specific factors contributing to higher or lower contamination in various settings have not been clearly defined and quantified. As part of the MOAI project (https://moaiapp.com), we are developing a privacy-preserving test and trace app to enable infection cluster investigators to get in touch with patients without having to know their identity. This approach allows involving users in the fight against the pandemic by contributing additional information in the form of anonymous research questionnaires. We first describe how the questionnaire was designed, and the synthetic data was generated based on a review we carried out on the latest available literature. We then present a model to evaluate the risk exposition of a user for a given setting. We finally propose a temporal addition to the model to evaluate the risk exposure over time for a given user.
Izhikevich-Inspired Optoelectronic Neurons with Excitatory and Inhibitory Inputs for Energy-Efficient Photonic Spiking Neural Networks
May 03, 2021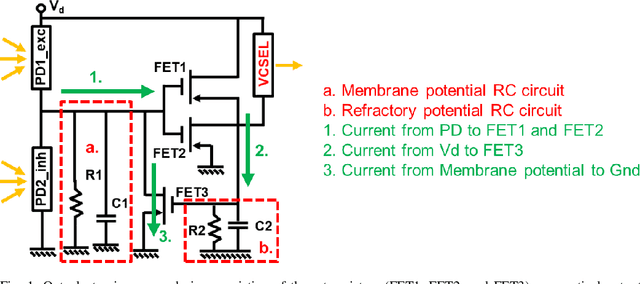
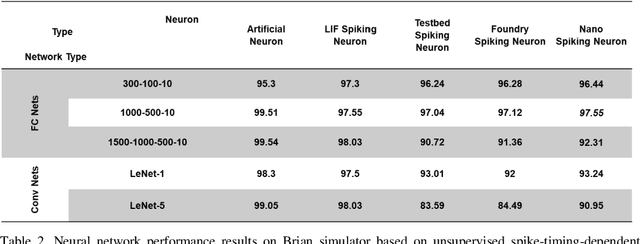
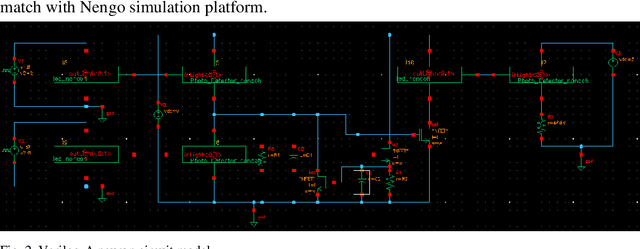

We designed, prototyped, and experimentally demonstrated, for the first time to our knowledge, an optoelectronic spiking neuron inspired by the Izhikevich model incorporating both excitatory and inhibitory optical spiking inputs and producing optical spiking outputs accordingly. The optoelectronic neurons consist of three transistors acting as electrical spiking circuits, a vertical-cavity surface-emitting laser (VCSEL) for optical spiking outputs, and two photodetectors for excitatory and inhibitory optical spiking inputs. Additional inclusion of capacitors and resistors complete the Izhikevich-inspired optoelectronic neurons, which receive excitatory and inhibitory optical spikes as inputs from other optoelectronic neurons. We developed a detailed optoelectronic neuron model in Verilog-A and simulated the circuit-level operation of various cases with excitatory input and inhibitory input signals. The experimental results closely resemble the simulated results and demonstrate how the excitatory inputs trigger the optical spiking outputs while the inhibitory inputs suppress the outputs. Utilizing the simulated neuron model, we conducted simulations using fully connected (FC) and convolutional neural networks (CNN). The simulation results using MNIST handwritten digits recognition show 90% accuracy on unsupervised learning and 97% accuracy on a supervised modified FC neural network. We further designed a nanoscale optoelectronic neuron utilizing quantum impedance conversion where a 200 aJ/spike input can trigger the output from on-chip nanolasers with 10 fJ/spike. The nanoscale neuron can support a fanout of ~80 or overcome 19 dB excess optical loss while running at 10 GSpikes/second in the neural network, which corresponds to 100x throughput and 1000x energy-efficiency improvement compared to state-of-art electrical neuromorphic hardware such as Loihi and NeuroGrid.
Automatic Differentiation to Simultaneously Identify Nonlinear Dynamics and Extract Noise Probability Distributions from Data
Sep 29, 2020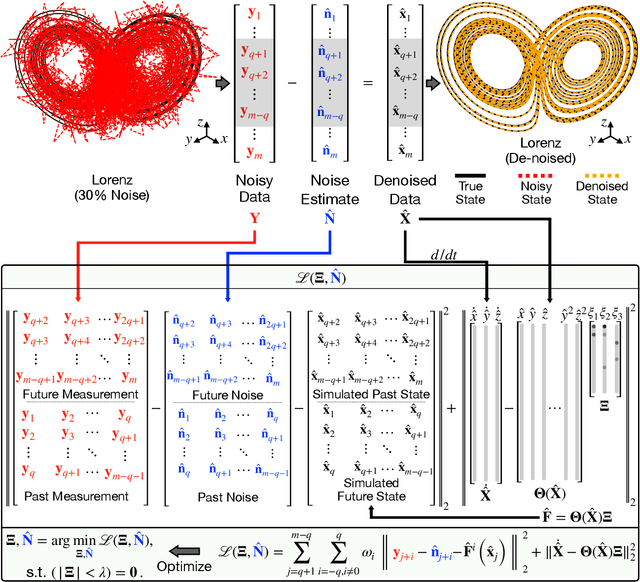
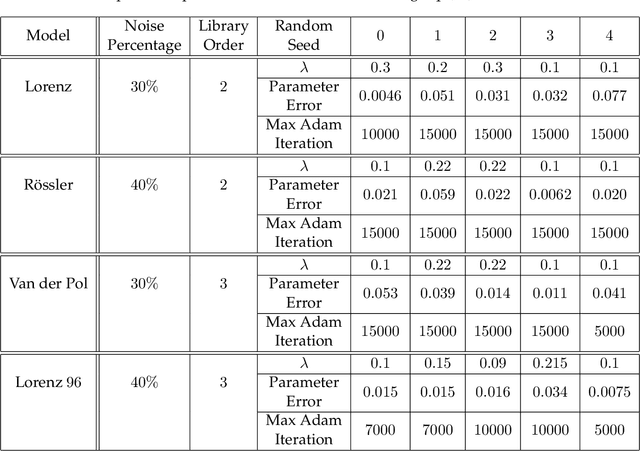
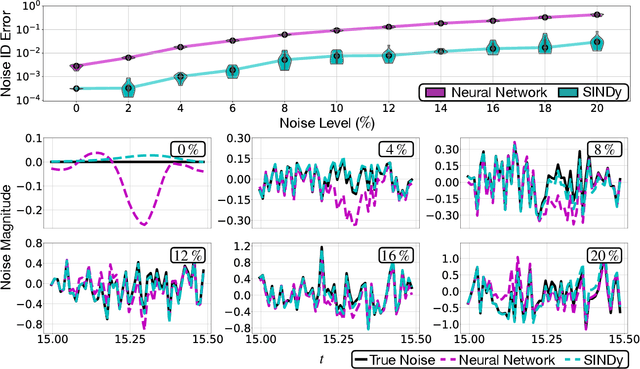
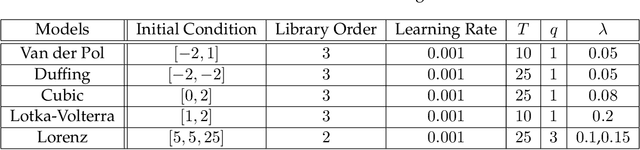
The sparse identification of nonlinear dynamics (SINDy) is a regression framework for the discovery of parsimonious dynamic models and governing equations from time-series data. As with all system identification methods, noisy measurements compromise the accuracy and robustness of the model discovery procedure. In this work, we develop a variant of the SINDy algorithm that integrates automatic differentiation and recent time-stepping constrained motivated by Rudy et al. for simultaneously (i) denoising the data, (ii) learning and parametrizing the noise probability distribution, and (iii) identifying the underlying parsimonious dynamical system responsible for generating the time-series data. Thus within an integrated optimization framework, noise can be separated from signal, resulting in an architecture that is approximately twice as robust to noise as state-of-the-art methods, handling as much as 40% noise on a given time-series signal and explicitly parametrizing the noise probability distribution. We demonstrate this approach on several numerical examples, from Lotka-Volterra models to the spatio-temporal Lorenz 96 model. Further, we show the method can identify a diversity of probability distributions including Gaussian, uniform, Gamma, and Rayleigh.
Distributed Multi-object Tracking under Limited Field of View Sensors
Dec 23, 2020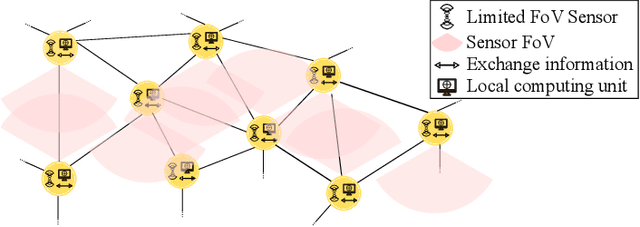
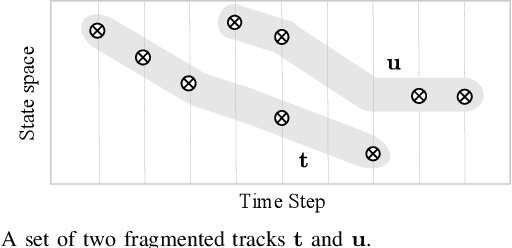
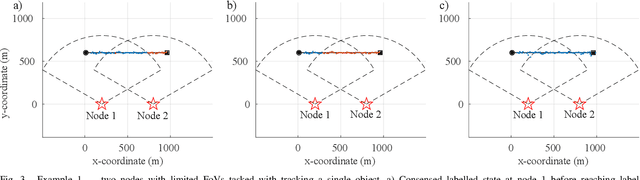
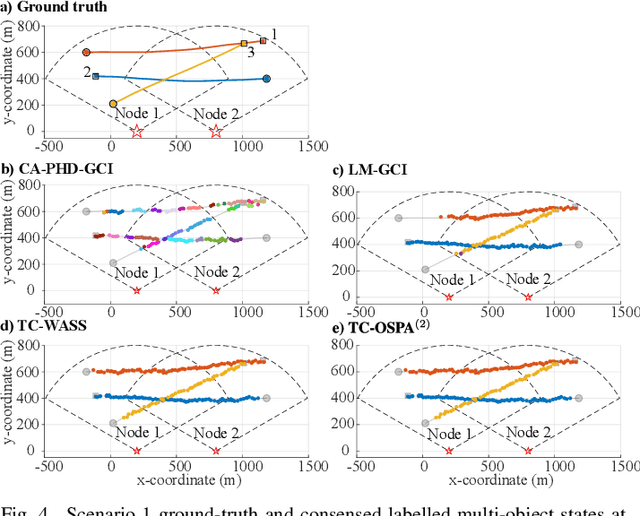
We consider the challenging problem of tracking multiple objects using a distributed network of sensors. In the pragmatic settings of a limited field of view (FoV) sensors, computing and communication resources of nodes, we develop a novel distributed multi-target algorithm that fuses local multi-object states instead of local multi-object densities. This algorithm uses a novel label consensus approach that reduces label inconsistency, caused by movements of objects from one node's limited FoV to another. To accomplish this, we formalise the concept of label consistency and determine a sufficient condition to achieve it. The proposed algorithm is i) fast and requires significantly less processing time than fusion methods using multi-object filtering densities, and ii) achieves better tracking accuracy by considering tracking errors measured by the Optimal Sub-Pattern Assignment (OSPA) metric over several scans rather than a single scan. Numerical experiments demonstrate the real-time capability of our proposed solution, in computational efficiency and accuracy compared to state-of-the-art solutions in challenging scenarios.
STEP: Stochastic Traversability Evaluation and Planning for Safe Off-road Navigation
Mar 04, 2021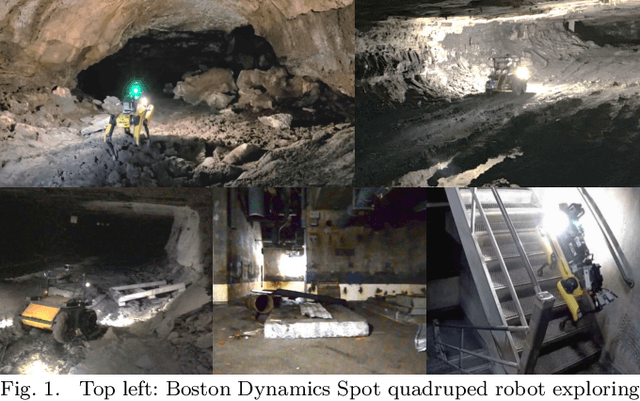
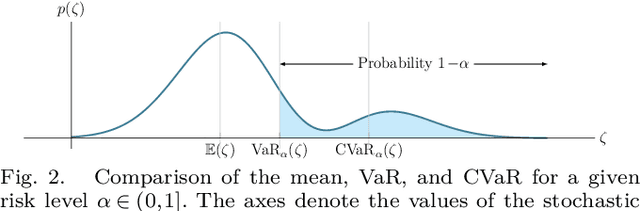
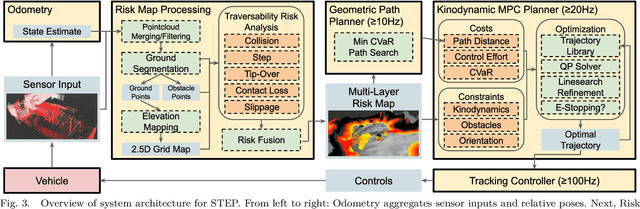
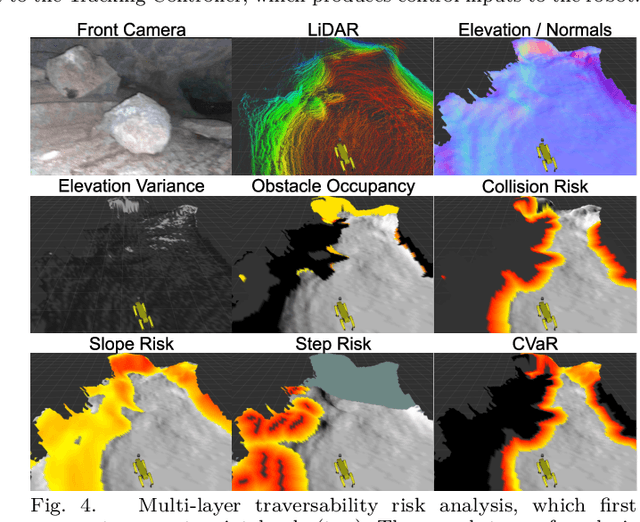
Although ground robotic autonomy has gained widespread usage in structured and controlled environments, autonomy in unknown and off-road terrain remains a difficult problem. Extreme, off-road, and unstructured environments such as undeveloped wilderness, caves, and rubble pose unique and challenging problems for autonomous navigation. To tackle these problems we propose an approach for assessing traversability and planning a safe, feasible, and fast trajectory in real-time. Our approach, which we name STEP (Stochastic Traversability Evaluation and Planning), relies on: 1) rapid uncertainty-aware mapping and traversability evaluation, 2) tail risk assessment using the Conditional Value-at-Risk (CVaR), and 3) efficient risk and constraint-aware kinodynamic motion planning using sequential quadratic programming-based (SQP) model predictive control (MPC). We analyze our method in simulation and validate its efficacy on wheeled and legged robotic platforms exploring extreme terrains including an underground lava tube.