 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
VideoClick: Video Object Segmentation with a Single Click
Jan 16, 2021
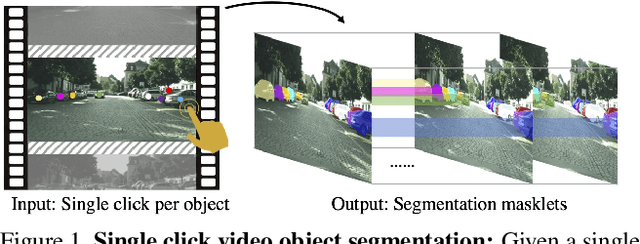


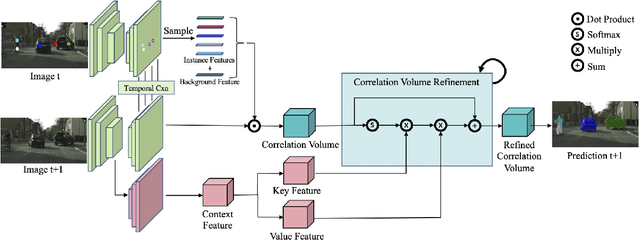
Annotating videos with object segmentation masks typically involves a two stage procedure of drawing polygons per object instance for all the frames and then linking them through time. While simple, this is a very tedious, time consuming and expensive process, making the creation of accurate annotations at scale only possible for well-funded labs. What if we were able to segment an object in the full video with only a single click? This will enable video segmentation at scale with a very low budget opening the door to many applications. Towards this goal, in this paper we propose a bottom up approach where given a single click for each object in a video, we obtain the segmentation masks of these objects in the full video. In particular, we construct a correlation volume that assigns each pixel in a target frame to either one of the objects in the reference frame or the background. We then refine this correlation volume via a recurrent attention module and decode the final segmentation. To evaluate the performance, we label the popular and challenging Cityscapes dataset with video object segmentations. Results on this new CityscapesVideo dataset show that our approach outperforms all the baselines in this challenging setting.
CoordiNet: uncertainty-aware pose regressor for reliable vehicle localization
Mar 19, 2021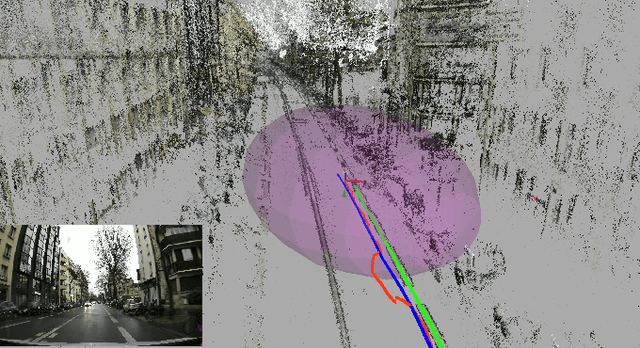
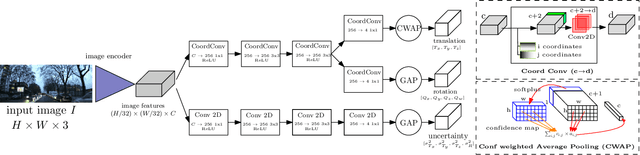

In this paper, we investigate visual-based camera localization with neural networks for robotics and autonomous vehicles applications. Our solution is a CNN-based algorithm which predicts camera pose (3D translation and 3D rotation) directly from a single image. It also provides an uncertainty estimate of the pose. Pose and uncertainty are learned together with a single loss function. Furthermore, we propose a new fully convolutional architecture, named CoordiNet, designed to embed some of the scene geometry. Our framework outperforms comparable methods on the largest available benchmark, the Oxford RobotCar dataset, with an average error of 8 meters where previous best was 19 meters. We have also investigated the performance of our method on large scenes for real time (18 fps) vehicle localization. In this setup, structure-based methods require a large database, and we show that our proposal is a reliable alternative, achieving 29cm median error in a 1.9km loop in a busy urban area.
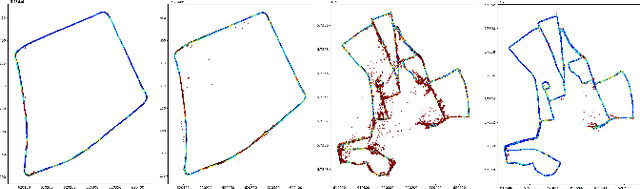
RECON: Rapid Exploration for Open-World Navigation with Latent Goal Models
Apr 12, 2021
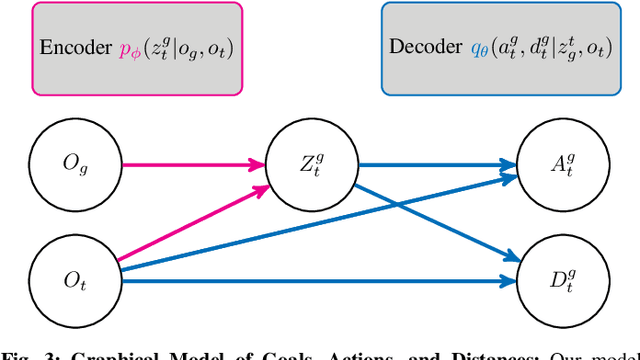
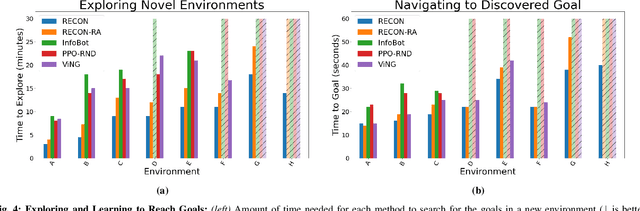
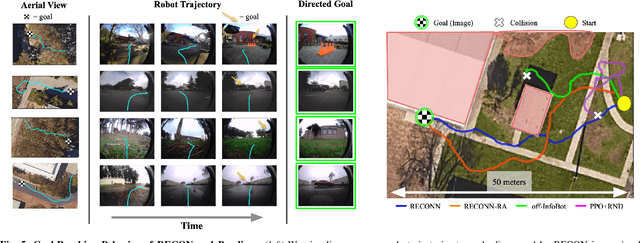
We describe a robotic learning system for autonomous navigation in diverse environments. At the core of our method are two components: (i) a non-parametric map that reflects the connectivity of the environment but does not require geometric reconstruction or localization, and (ii) a latent variable model of distances and actions that enables efficiently constructing and traversing this map. The model is trained on a large dataset of prior experience to predict the expected amount of time and next action needed to transit between the current image and a goal image. Training the model in this way enables it to develop a representation of goals robust to distracting information in the input images, which aids in deploying the system to quickly explore new environments. We demonstrate our method on a mobile ground robot in a range of outdoor navigation scenarios. Our method can learn to reach new goals, specified as images, in a radius of up to 80 meters in just 20 minutes, and reliably revisit these goals in changing environments. We also demonstrate our method's robustness to previously-unseen obstacles and variable weather conditions. We encourage the reader to visit the project website for videos of our experiments and demonstrations https://sites.google.com/view/recon-robot
hls4ml: An Open-Source Codesign Workflow to Empower Scientific Low-Power Machine Learning Devices
Mar 09, 2021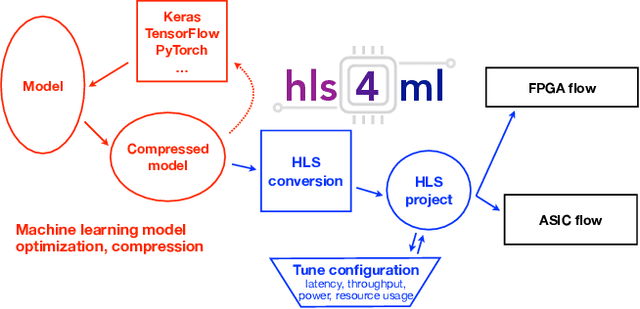
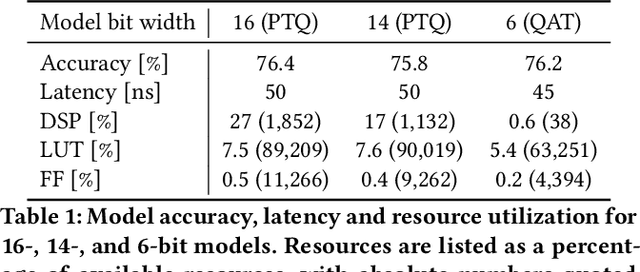
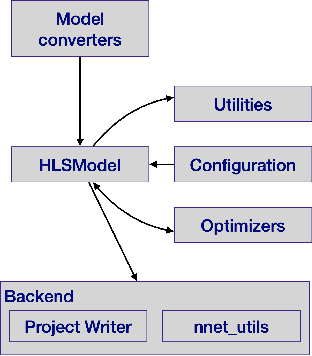
Accessible machine learning algorithms, software, and diagnostic tools for energy-efficient devices and systems are extremely valuable across a broad range of application domains. In scientific domains, real-time near-sensor processing can drastically improve experimental design and accelerate scientific discoveries. To support domain scientists, we have developed hls4ml, an open-source software-hardware codesign workflow to interpret and translate machine learning algorithms for implementation with both FPGA and ASIC technologies. We expand on previous hls4ml work by extending capabilities and techniques towards low-power implementations and increased usability: new Python APIs, quantization-aware pruning, end-to-end FPGA workflows, long pipeline kernels for low power, and new device backends include an ASIC workflow. Taken together, these and continued efforts in hls4ml will arm a new generation of domain scientists with accessible, efficient, and powerful tools for machine-learning-accelerated discovery.
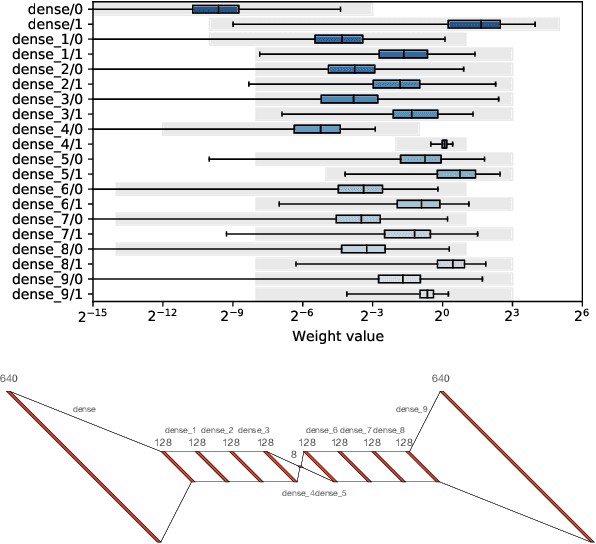
Guided Upsampling Network for Real-Time Semantic Segmentation
Jul 19, 2018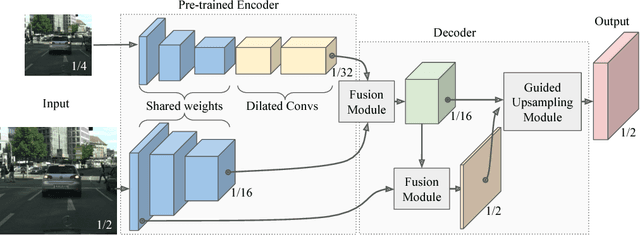
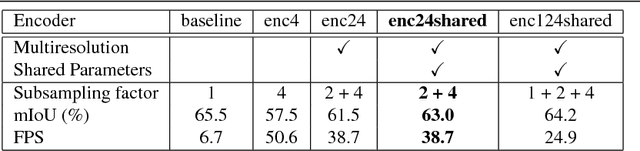
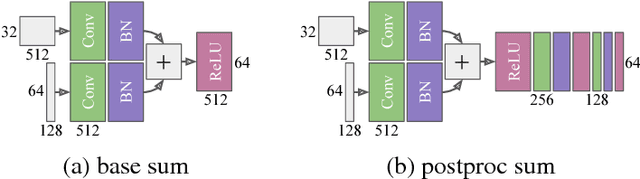
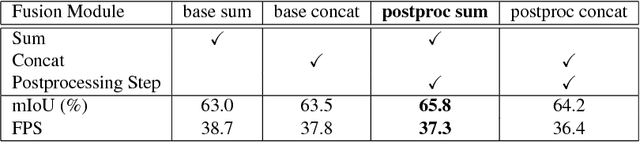
Semantic segmentation architectures are mainly built upon an encoder-decoder structure. These models perform subsequent downsampling operations in the encoder. Since operations on high-resolution activation maps are computationally expensive, usually the decoder produces output segmentation maps by upsampling with parameters-free operators like bilinear or nearest-neighbor. We propose a Neural Network named Guided Upsampling Network which consists of a multiresolution architecture that jointly exploits high-resolution and large context information. Then we introduce a new module named Guided Upsampling Module (GUM) that enriches upsampling operators by introducing a learnable transformation for semantic maps. It can be plugged into any existing encoder-decoder architecture with little modifications and low additional computation cost. We show with quantitative and qualitative experiments how our network benefits from the use of GUM module. A comprehensive set of experiments on the publicly available Cityscapes dataset demonstrates that Guided Upsampling Network can efficiently process high-resolution images in real-time while attaining state-of-the art performances.
Higher-Order Spectral Clustering of Directed Graphs
Nov 10, 2020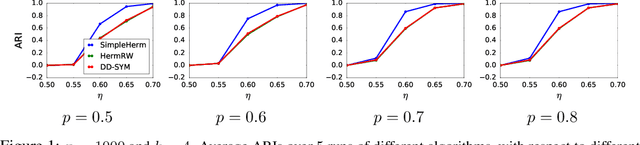
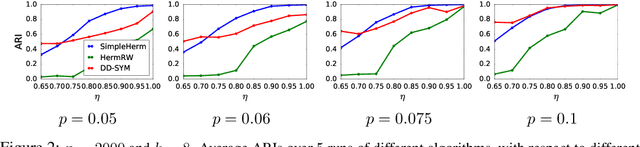
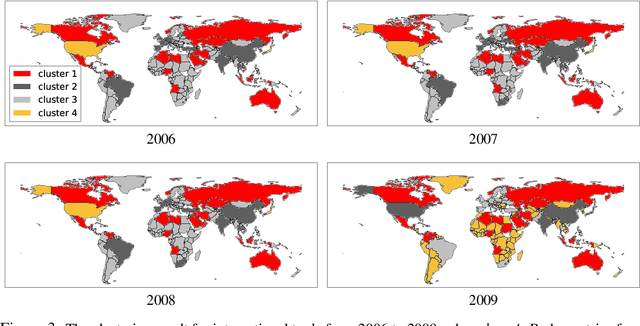
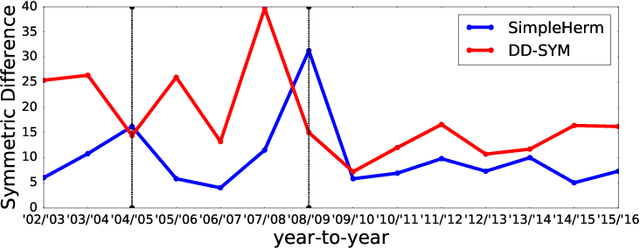
Clustering is an important topic in algorithms, and has a number of applications in machine learning, computer vision, statistics, and several other research disciplines. Traditional objectives of graph clustering are to find clusters with low conductance. Not only are these objectives just applicable for undirected graphs, they are also incapable to take the relationships between clusters into account, which could be crucial for many applications. To overcome these downsides, we study directed graphs (digraphs) whose clusters exhibit further "structural" information amongst each other. Based on the Hermitian matrix representation of digraphs, we present a nearly-linear time algorithm for digraph clustering, and further show that our proposed algorithm can be implemented in sublinear time under reasonable assumptions. The significance of our theoretical work is demonstrated by extensive experimental results on the UN Comtrade Dataset: the output clustering of our algorithm exhibits not only how the clusters (sets of countries) relate to each other with respect to their import and export records, but also how these clusters evolve over time, in accordance with known facts in international trade.
Towards a Next Generation Computing Paradigm: Approximate Computing in Robotics Systems and Environment-Experimentation, Case Study and Practical Implications
Apr 12, 2021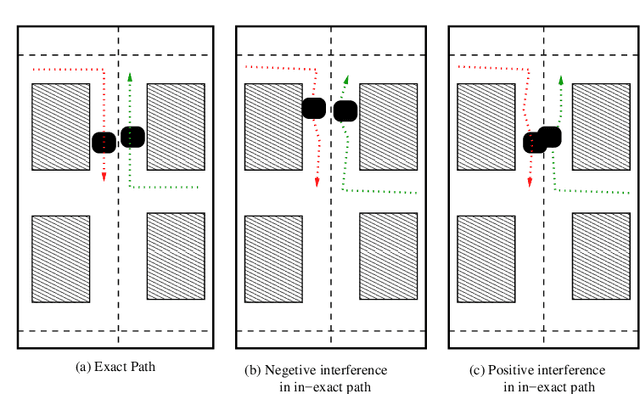
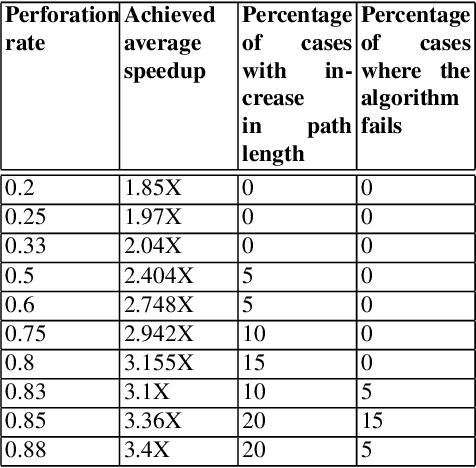
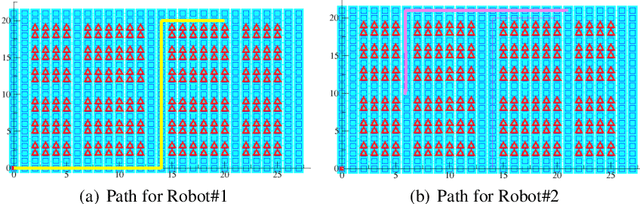
Approximate computing is a computation domain which can be used to trade time and energy with quality and therefore is useful in embedded systems. Energy is the prime resource in battery-driven embedded systems, like robots. Approximate computing can be used as a technique to generate approximate version of the control functionalities of a robot, enabling it to ration energy for computation at the cost of degraded quality. Usually, the programmer of the function specifies the extent of degradation that is safe for the overall safety of the system. However, in a collaborative environment, where several sub-systems co-exist and some of the functionality of each of them have been approximated, the safety of the overall system may be compromised. In this paper, we consider multiple identical robots operate in a warehouse, and the path planning function of the robot is approximated. Although the planned paths are safe for individual robots (i.e. they do not collide with the racks), we show that this leads to a collision among the robots. So, a controlled approximation needs to be carried out in such situations to harness the full power of this new paradigm if it needs to be a mainstream paradigm in future.
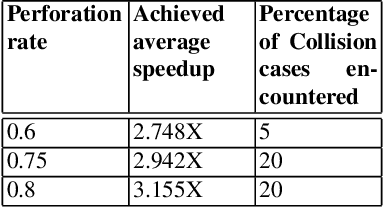
Humanoid Control Under Interchangeable Fixed and Sliding Unilateral Contacts
Mar 04, 2021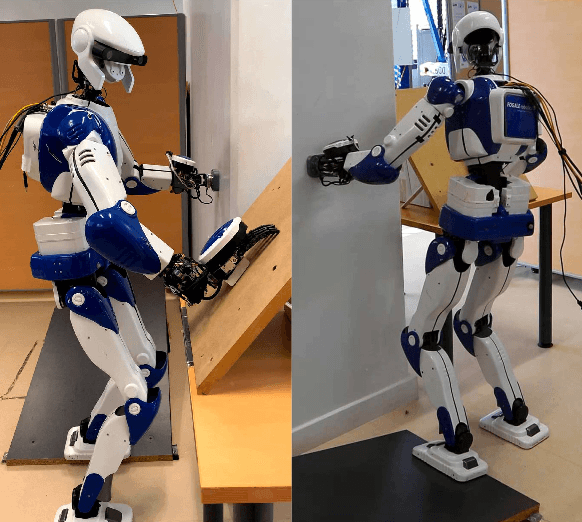
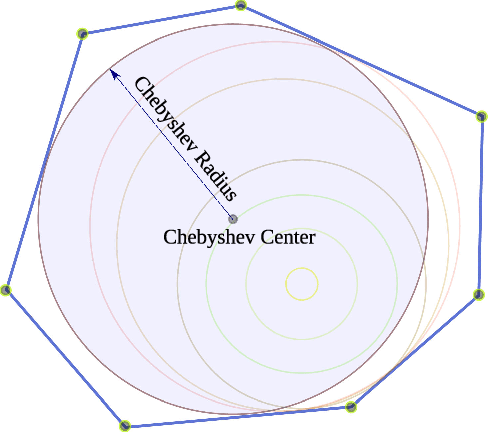
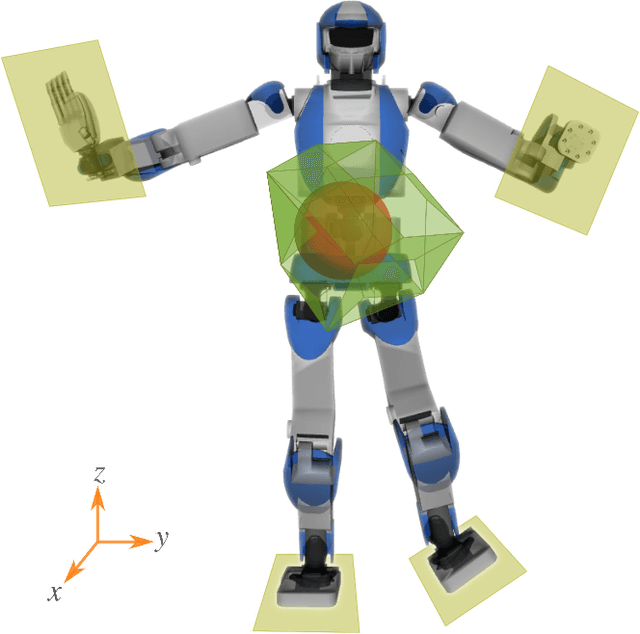
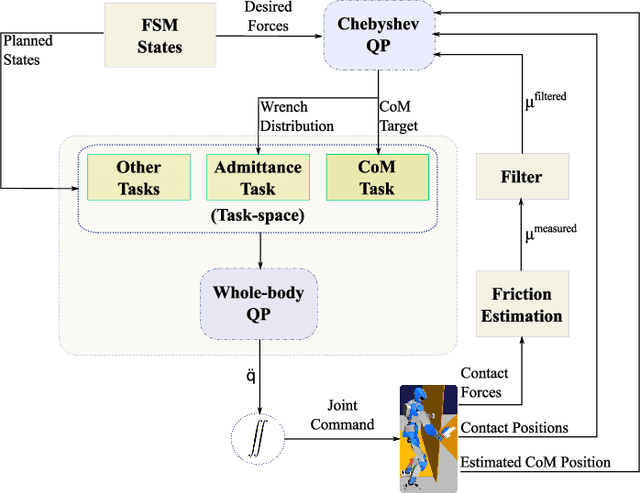
In this letter, we propose a whole-body control strategy for humanoid robots in multi-contact settings that enables switching between fixed and sliding contacts under active balance. We compute, in real-time, a safe center-of-mass position and wrench distribution of the contact points based on the Chebyshev center. Our solution is formulated as a quadratic programming problem without a priori computation of balance regions. We assess our approach with experiments highlighting switches between fixed and sliding contact modes in multi-contact configurations. A humanoid robot demonstrates such contact interchanges from fully-fixed to multi-sliding and also shuffling of the foot. The scenarios illustrate the performance of our control scheme in achieving the desired forces, CoM position attractor, and planned trajectories while actively maintaining balance.
Generic Variance Bounds on Estimation and Prediction Errors in Time Series Analysis: An Entropy Perspective
Apr 15, 2019In this paper, we obtain generic bounds on the variances of estimation and prediction errors in time series analysis via an information-theoretic approach. It is seen in general that the error bounds are determined by the conditional entropy of the data point to be estimated or predicted given the side information or past observations. Additionally, we discover that in order to achieve the prediction error bounds asymptotically, the necessary and sufficient condition is that the "innovation" is asymptotically white Gaussian. When restricted to Gaussian processes and 1-step prediction, our bounds are shown to reduce to the Kolmogorov-Szeg\"o formula and Wiener-Masani formula known from linear prediction theory.
Re3 : Real-Time Recurrent Regression Networks for Visual Tracking of Generic Objects
Feb 26, 2018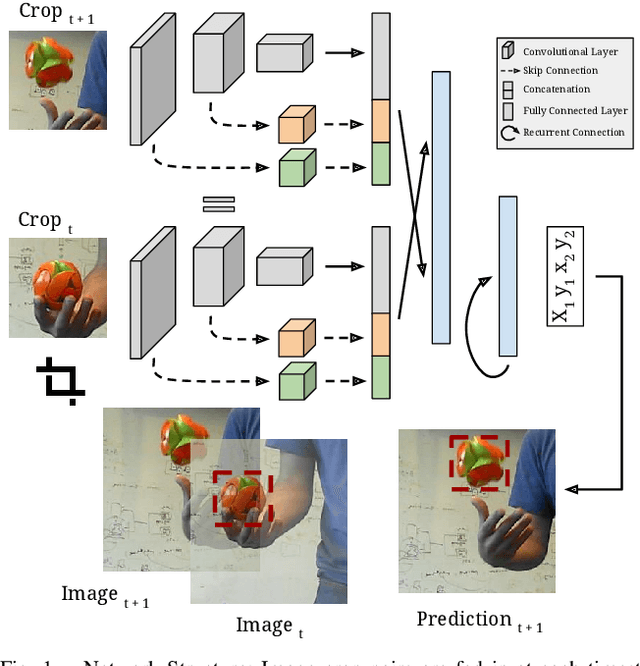
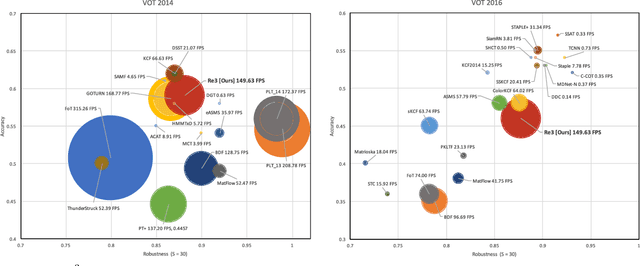
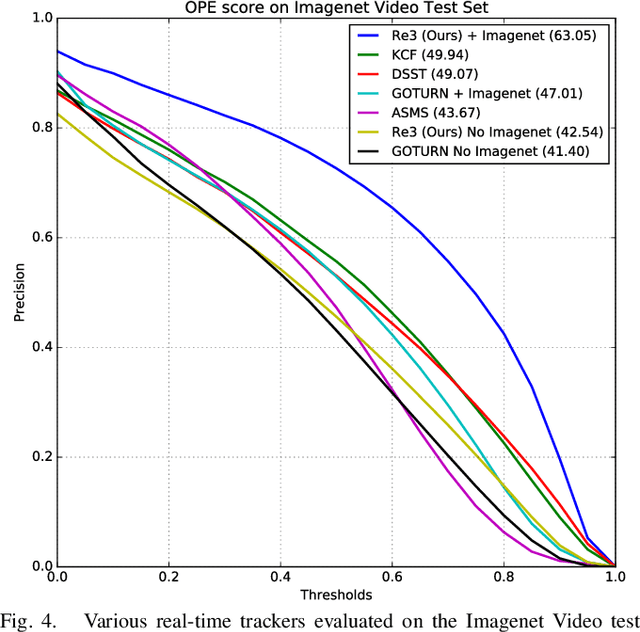
Robust object tracking requires knowledge and understanding of the object being tracked: its appearance, its motion, and how it changes over time. A tracker must be able to modify its underlying model and adapt to new observations. We present Re3, a real-time deep object tracker capable of incorporating temporal information into its model. Rather than focusing on a limited set of objects or training a model at test-time to track a specific instance, we pretrain our generic tracker on a large variety of objects and efficiently update on the fly; Re3 simultaneously tracks and updates the appearance model with a single forward pass. This lightweight model is capable of tracking objects at 150 FPS, while attaining competitive results on challenging benchmarks. We also show that our method handles temporary occlusion better than other comparable trackers using experiments that directly measure performance on sequences with occlusion.
* Presented at ICRA 2018