 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Online Recognition of Actions Involving Objects
Apr 13, 2021
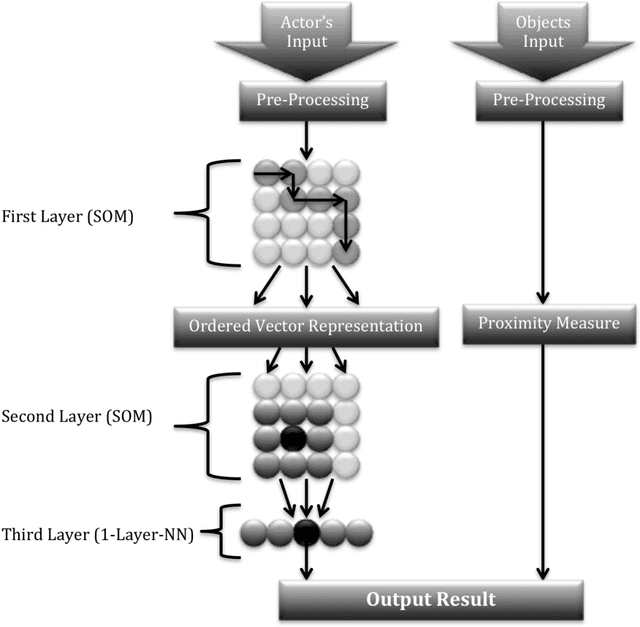
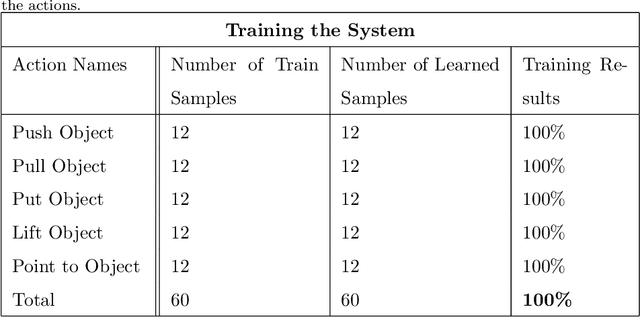
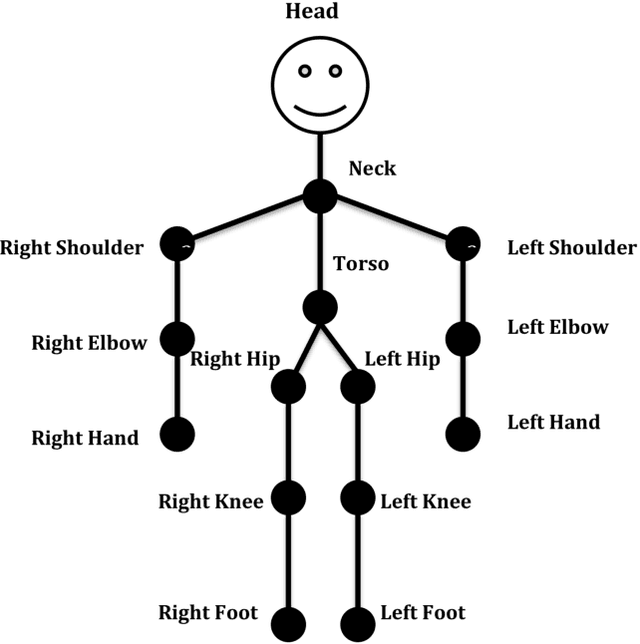
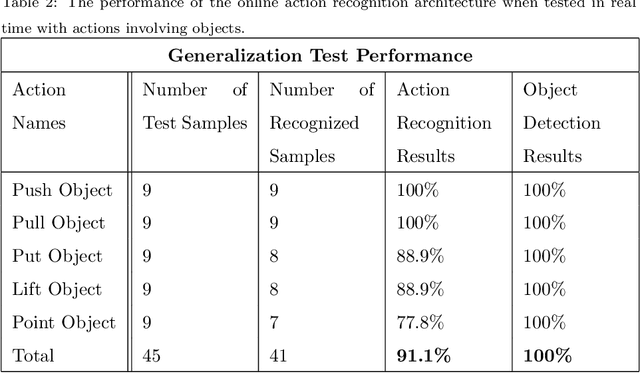
We present an online system for real time recognition of actions involving objects working in online mode. The system merges two streams of information processing running in parallel. One is carried out by a hierarchical self-organizing map (SOM) system that recognizes the performed actions by analysing the spatial trajectories of the agent's movements. It consists of two layers of SOMs and a custom made supervised neural network. The activation sequences in the first layer SOM represent the sequences of significant postures of the agent during the performance of actions. These activation sequences are subsequently recoded and clustered in the second layer SOM, and then labeled by the activity in the third layer custom made supervised neural network. The second information processing stream is carried out by a second system that determines which object among several in the agent's vicinity the action is applied to. This is achieved by applying a proximity measure. The presented method combines the two information processing streams to determine what action the agent performed and on what object. The action recognition system has been tested with excellent performance.
Computation Resource Allocation Solution in Recommender Systems
Mar 03, 2021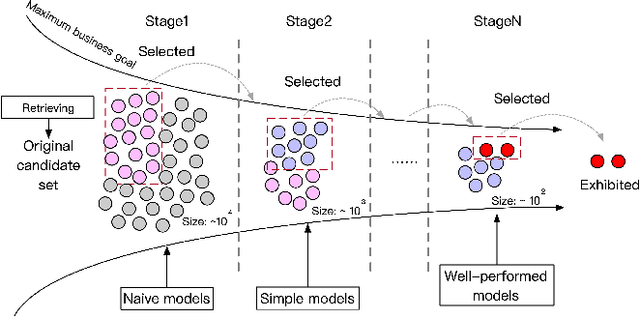

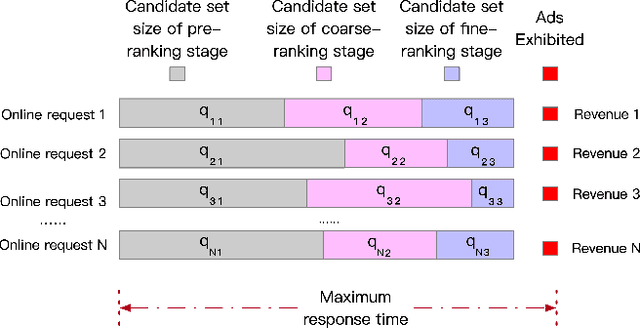
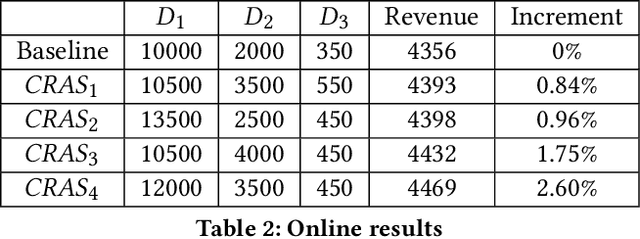
Recommender systems rely heavily on increasing computation resources to improve their business goal. By deploying computation-intensive models and algorithms, these systems are able to inference user interests and exhibit certain ads or commodities from the candidate set to maximize their business goals. However, such systems are facing two challenges in achieving their goals. On the one hand, facing massive online requests, computation-intensive models and algorithms are pushing their computation resources to the limit. On the other hand, the response time of these systems is strictly limited to a short period, e.g. 300 milliseconds in our real system, which is also being exhausted by the increasingly complex models and algorithms. In this paper, we propose the computation resource allocation solution (CRAS) that maximizes the business goal with limited computation resources and response time. We comprehensively illustrate the problem and formulate such a problem as an optimization problem with multiple constraints, which could be broken down into independent sub-problems. To solve the sub-problems, we propose the revenue function to facilitate the theoretical analysis, and obtain the optimal computation resource allocation strategy. To address the applicability issues, we devise the feedback control system to help our strategy constantly adapt to the changing online environment. The effectiveness of our method is verified by extensive experiments based on the real dataset from Taobao.com. We also deploy our method in the display advertising system of Alibaba. The online results show that our computation resource allocation solution achieves significant business goal improvement without any increment of computation cost, which demonstrates the efficacy of our method in real industrial practice.
RANSIC: Fast and Highly Robust Estimation for Rotation Search and Point Cloud Registration using Invariant Compatibility
Apr 21, 2021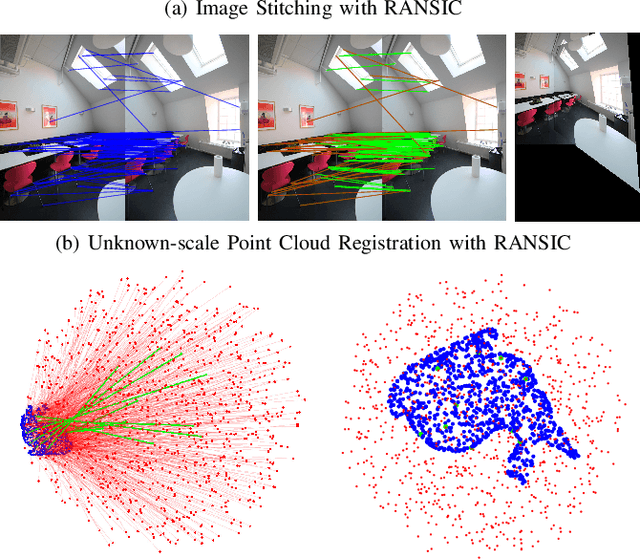
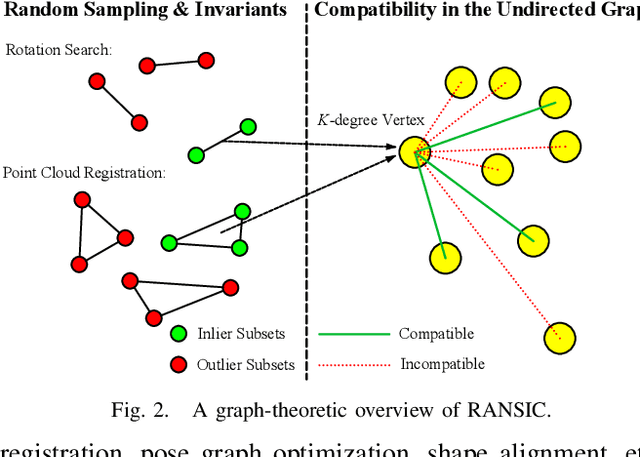
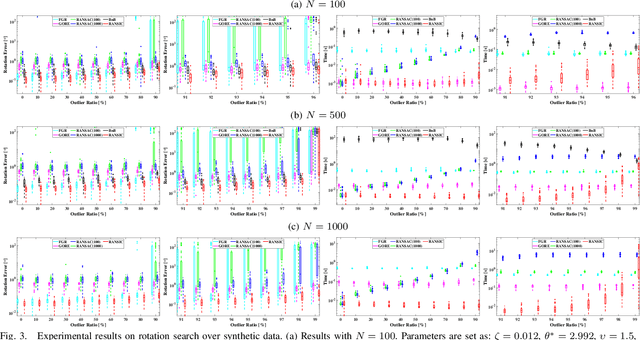
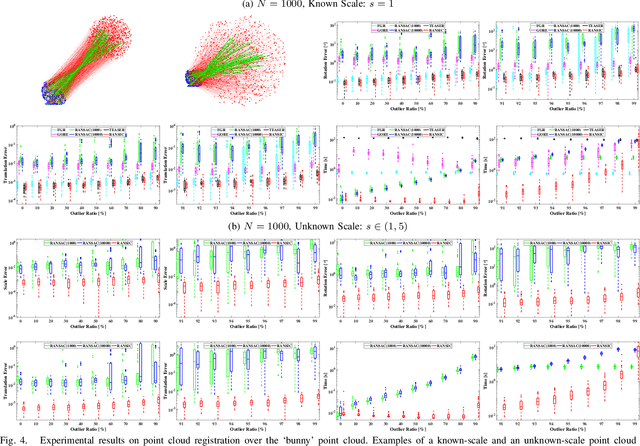
Correspondence-based rotation search and point cloud registration are two fundamental problems in robotics and computer vision. However, the presence of outliers, sometimes even occupying the great majority of the putative correspondences, can make many existing algorithms either fail or have very high computational cost. In this paper, we present RANSIC (RANdom Sampling with Invariant Compatibility), a fast and highly robust method applicable to both problems based on a new paradigm combining random sampling with invariance and compatibility. Generally, RANSIC starts with randomly selecting small subsets from the correspondence set, then seeks potential inliers as graph vertices from the random subsets through the compatibility tests of invariants established in each problem, and eventually returns the eligible inliers when there exists at least one K-degree vertex (K is automatically updated depending on the problem) and the residual errors satisfy a certain termination condition at the same time. In multiple synthetic and real experiments, we demonstrate that RANSIC is fast for use, robust against over 95% outliers, and also able to recall approximately 100% inliers, outperforming other state-of-the-art solvers for both the rotation search and the point cloud registration problems.
A novel 3D display based on micro-volumetric scanning and real time reconstruction of holograms principle
Dec 16, 2018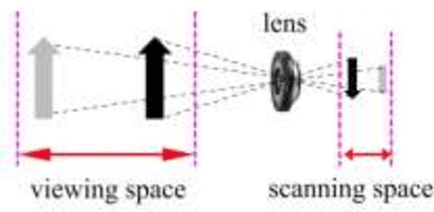
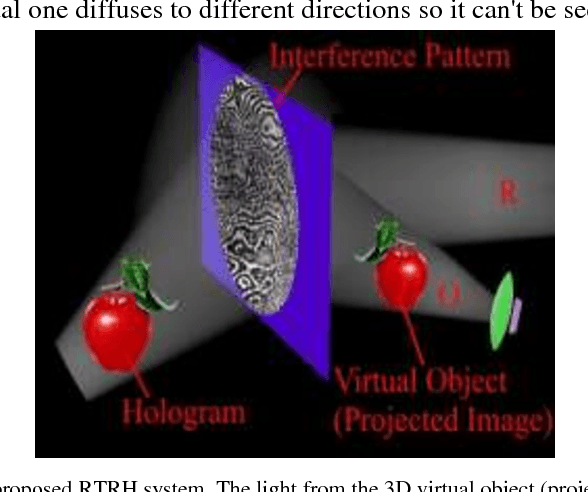
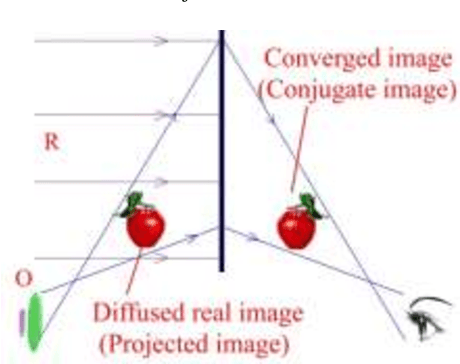
The present study proposes a novel 3D display contains a micro-volumetric scanning system (MVS) and a real time reconstruction hologram system (RTRH).
Polynomial-time probabilistic reasoning with partial observations via implicit learning in probability logics
Jun 28, 2018Standard approaches to probabilistic reasoning require that one possesses an explicit model of the distribution in question. But, the empirical learning of models of probability distributions from partial observations is a problem for which efficient algorithms are generally not known. In this work we consider the use of bounded-degree fragments of the "sum-of-squares" logic as a probability logic. Prior work has shown that we can decide refutability for such fragments in polynomial-time. We propose to use such fragments to answer queries about whether a given probability distribution satisfies a given system of constraints and bounds on expected values. We show that in answering such queries, such constraints and bounds can be implicitly learned from partial observations in polynomial-time as well. It is known that this logic is capable of deriving many bounds that are useful in probabilistic analysis. We show here that it furthermore captures useful polynomial-time fragments of resolution. Thus, these fragments are also quite expressive.
PANDA : Perceptually Aware Neural Detection of Anomalies
Apr 28, 2021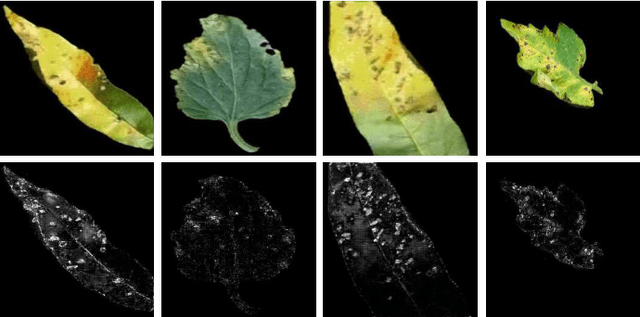
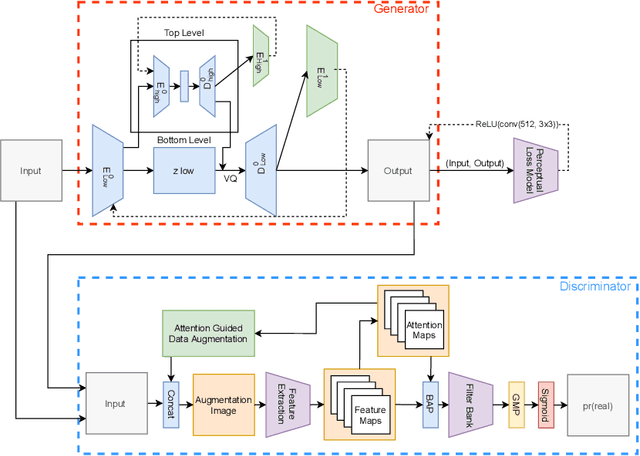
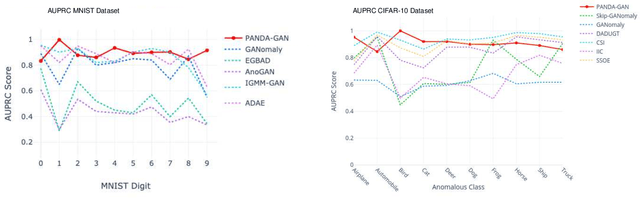
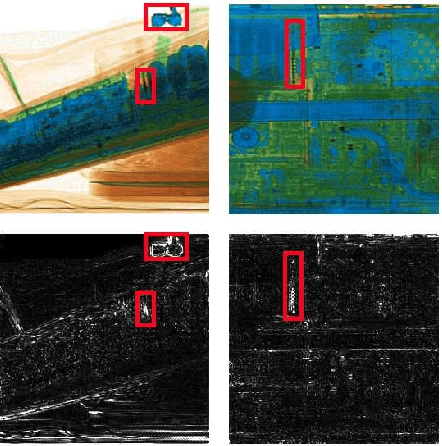
Semi-supervised methods of anomaly detection have seen substantial advancement in recent years. Of particular interest are applications of such methods to diverse, real-world anomaly detection problems where anomalous variations can vary from the visually obvious to the very subtle. In this work, we propose a novel fine-grained VAE-GAN architecture trained in a semi-supervised manner in order to detect both visually distinct and subtle anomalies. With the use of a residually connected dual-feature extractor, a fine-grained discriminator and a perceptual loss function, we are able to detect subtle, low inter-class (anomaly vs. normal) variant anomalies with greater detection capability and smaller margins of deviation in AUC value during inference compared to prior work whilst also remaining time-efficient during inference. We achieve state of-the-art anomaly detection results when compared extensively with prior semi-supervised approaches across a multitude of anomaly detection benchmark tasks including trivial leave-one out tasks (CIFAR-10 - AUPRCavg: 0.91; MNIST - AUPRCavg: 0.90) in addition to challenging real-world anomaly detection tasks (plant leaf disease - AUC: 0.776; threat item X-ray - AUC: 0.51), video frame-level anomaly detection (UCSDPed1 - AUC: 0.95) and high frequency texture with object anomalous defect detection (MVTEC - AUCavg: 0.83).
Deep Learning for Needle Detection in a Cannulation Simulator
May 05, 2021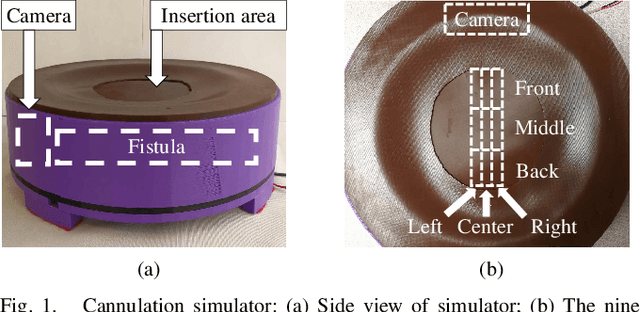
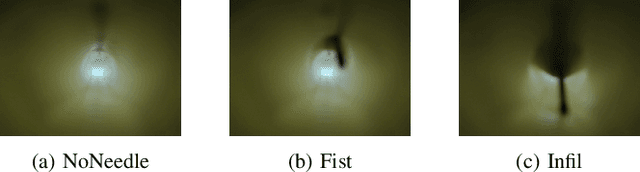
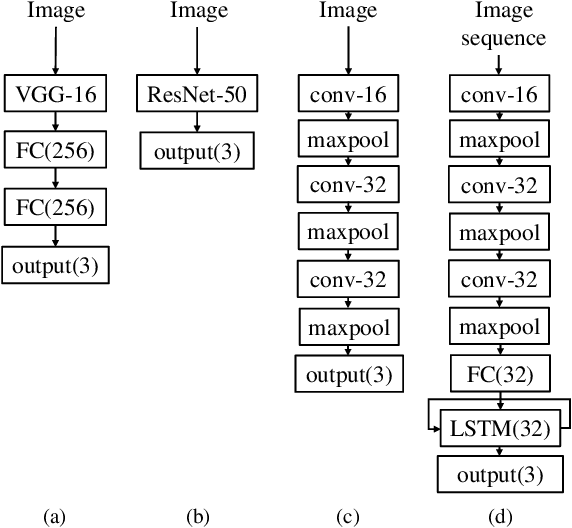
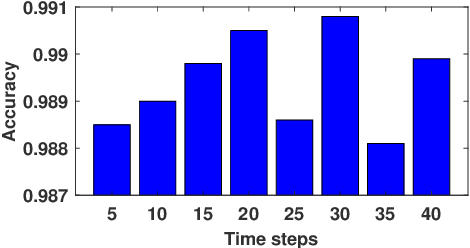
Cannulation for hemodialysis is the act of inserting a needle into a surgically created vascular access (e.g., an arteriovenous fistula) for the purpose of dialysis. The main risk associated with cannulation is infiltration, the puncture of the wall of the vascular access after entry, which can cause medical complications. Simulator-based training allows clinicians to gain cannulation experience without putting patients at risk. In this paper, we propose to use deep-learning-based techniques for detecting, based on video, whether the needle tip is in or has infiltrated the simulated fistula. Three categories of deep neural networks are investigated in this work: modified pre-trained models based on VGG-16 and ResNet-50, light convolutional neural networks (light CNNs), and convolutional recurrent neural networks (CRNNs). CRNNs consist of convolutional layers and a long short-term memory (LSTM) layer. A data set of cannulation experiments was collected and analyzed. The results show that both the light CNN and the CRNN achieve better performance than the pre-trained baseline models. The CRNN was implemented in real time on commodity hardware for use in the cannulation simulator, and the performance was verified. Deep-learning video analysis is a viable method for detecting needle state in a low cost cannulation simulator. Our data sets and code are released at https://github.com/axin233/DL_for_Needle_Detection_Cannulation
Learning to Optimize Under Constraints with Unsupervised Deep Neural Networks
Jan 04, 2021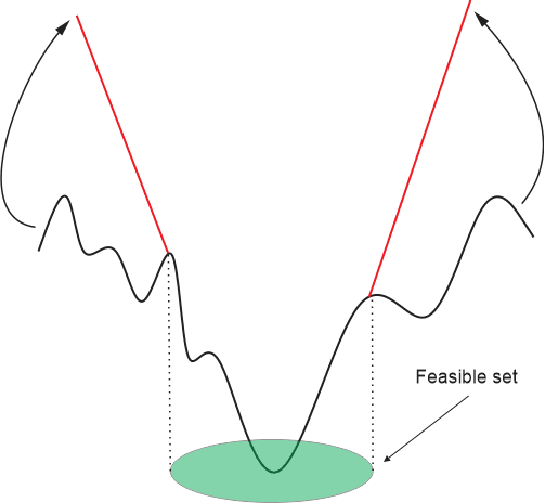
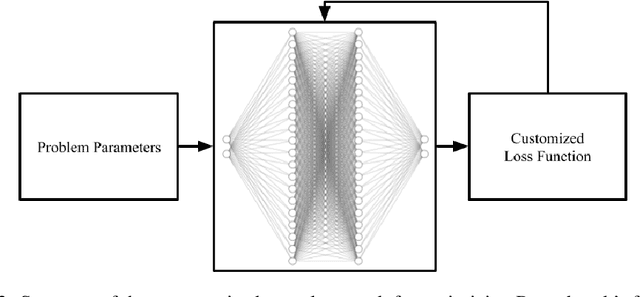
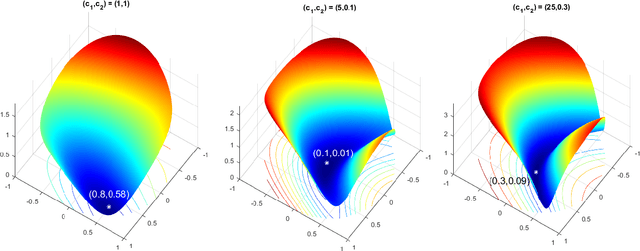
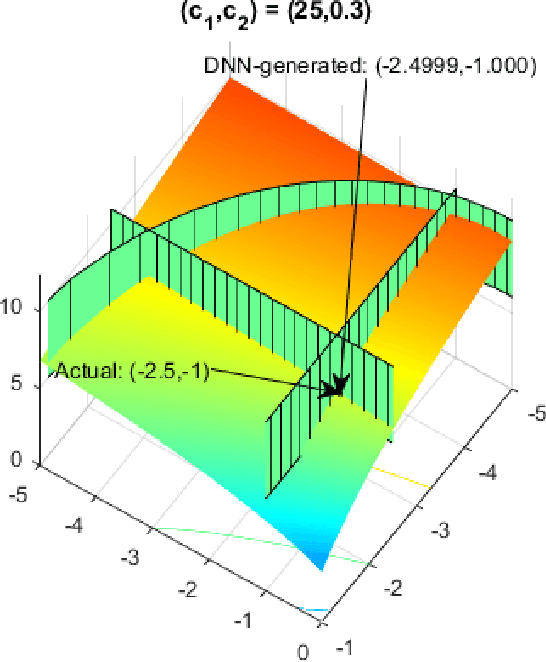
In this paper, we propose a machine learning (ML) method to learn how to solve a generic constrained continuous optimization problem. To the best of our knowledge, the generic methods that learn to optimize, focus on unconstrained optimization problems and those dealing with constrained problems are not easy-to-generalize. This approach is quite useful in optimization tasks where the problem's parameters constantly change and require resolving the optimization task per parameter update. In such problems, the computational complexity of optimization algorithms such as gradient descent or interior point method preclude near-optimal designs in real-time applications. In this paper, we propose an unsupervised deep learning (DL) solution for solving constrained optimization problems in real-time by relegating the main computation load to offline training phase. This paper's main contribution is proposing a method for enforcing the equality and inequality constraints to the DL-generated solutions for generic optimization tasks.
Robust Real-time RGB-D Visual Odometry in Dynamic Environments via Rigid Motion Model
Jul 19, 2019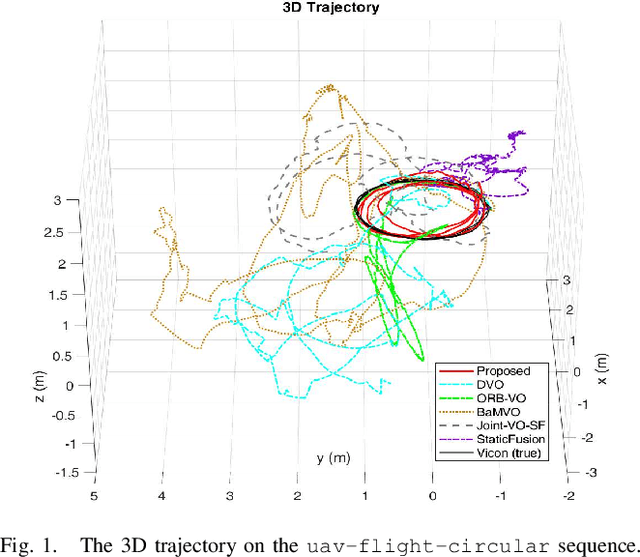

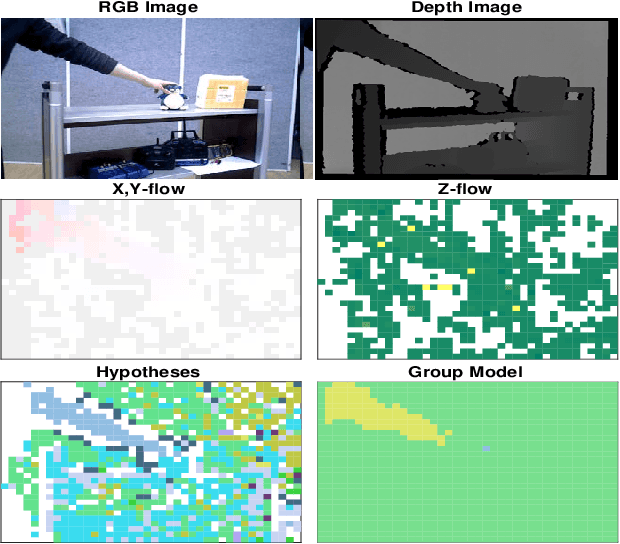

In the paper, we propose a robust real-time visual odometry in dynamic environments via rigid-motion model updated by scene flow. The proposed algorithm consists of spatial motion segmentation and temporal motion tracking. The spatial segmentation first generates several motion hypotheses by using a grid-based scene flow and clusters the extracted motion hypotheses, separating objects that move independently of one another. Further, we use a dual-mode motion model to consistently distinguish between the static and dynamic parts in the temporal motion tracking stage. Finally, the proposed algorithm estimates the pose of a camera by taking advantage of the region classified as static parts. In order to evaluate the performance of visual odometry under the existence of dynamic rigid objects, we use self-collected dataset containing RGB-D images and motion capture data for ground-truth. We compare our algorithm with state-of-the-art visual odometry algorithms. The validation results suggest that the proposed algorithm can estimate the pose of a camera robustly and accurately in dynamic environments.
Lesion Segmentation and RECIST Diameter Prediction via Click-driven Attention and Dual-path Connection
May 05, 2021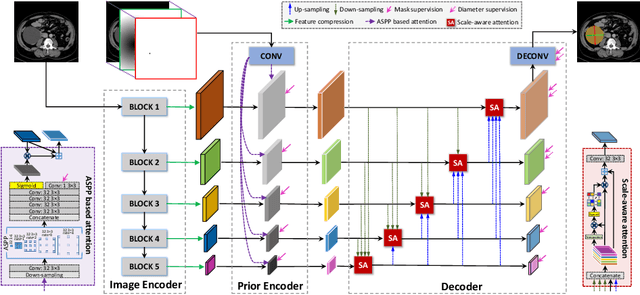
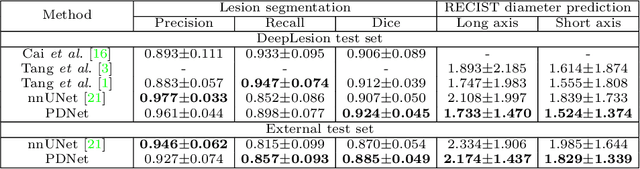
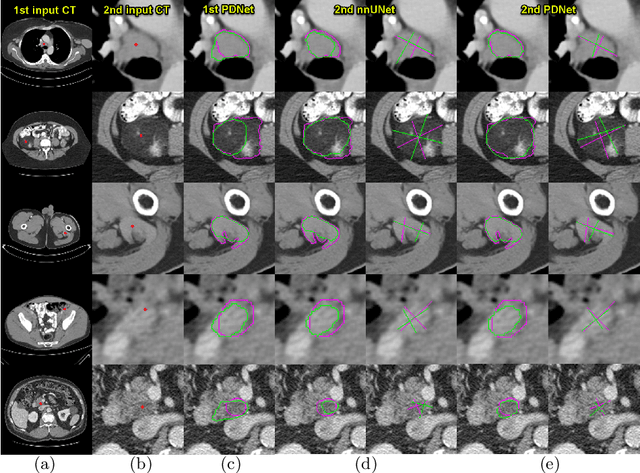
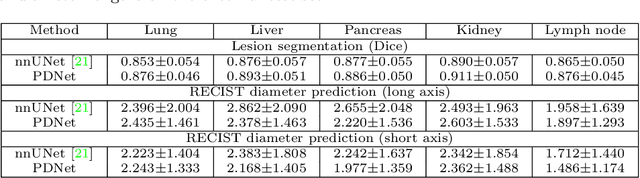
Measuring lesion size is an important step to assess tumor growth and monitor disease progression and therapy response in oncology image analysis. Although it is tedious and highly time-consuming, radiologists have to work on this task by using RECIST criteria (Response Evaluation Criteria In Solid Tumors) routinely and manually. Even though lesion segmentation may be the more accurate and clinically more valuable means, physicians can not manually segment lesions as now since much more heavy laboring will be required. In this paper, we present a prior-guided dual-path network (PDNet) to segment common types of lesions throughout the whole body and predict their RECIST diameters accurately and automatically. Similar to [1], a click guidance from radiologists is the only requirement. There are two key characteristics in PDNet: 1) Learning lesion-specific attention matrices in parallel from the click prior information by the proposed prior encoder, named click-driven attention; 2) Aggregating the extracted multi-scale features comprehensively by introducing top-down and bottom-up connections in the proposed decoder, named dual-path connection. Experiments show the superiority of our proposed PDNet in lesion segmentation and RECIST diameter prediction using the DeepLesion dataset and an external test set. PDNet learns comprehensive and representative deep image features for our tasks and produces more accurate results on both lesion segmentation and RECIST diameter prediction.