 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Grey-box Adversarial Attack And Defence For Sentiment Classification
Mar 22, 2021
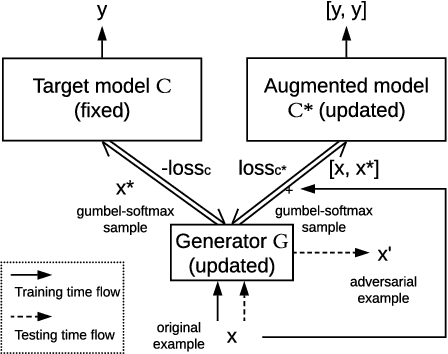
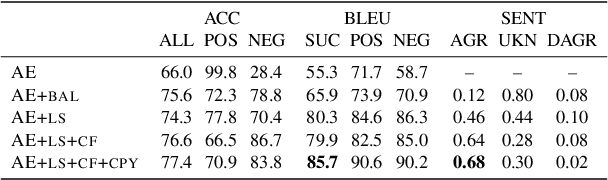
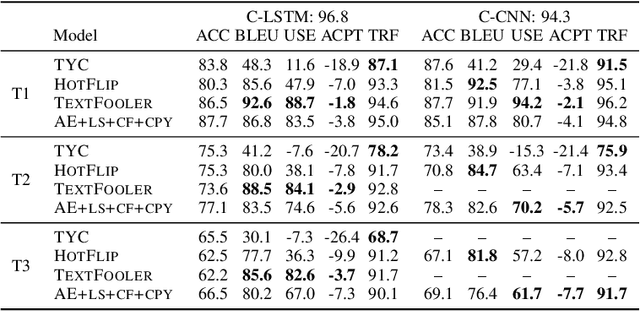
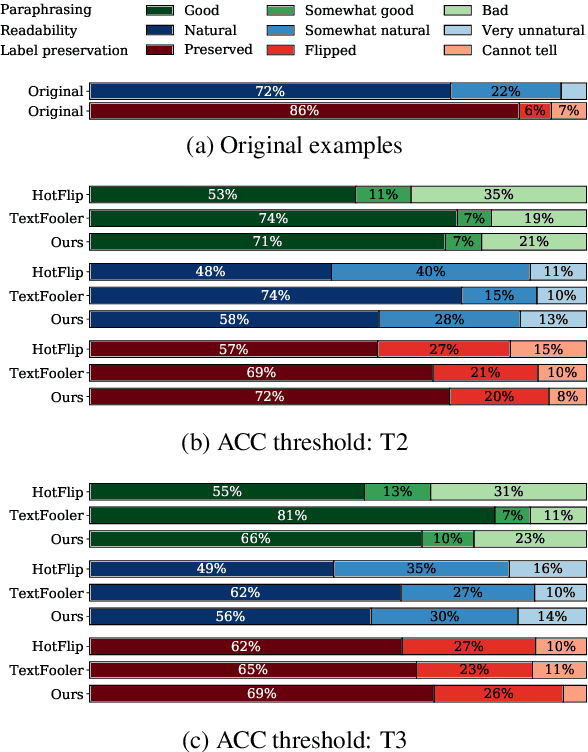
We introduce a grey-box adversarial attack and defence framework for sentiment classification. We address the issues of differentiability, label preservation and input reconstruction for adversarial attack and defence in one unified framework. Our results show that once trained, the attacking model is capable of generating high-quality adversarial examples substantially faster (one order of magnitude less in time) than state-of-the-art attacking methods. These examples also preserve the original sentiment according to human evaluation. Additionally, our framework produces an improved classifier that is robust in defending against multiple adversarial attacking methods. Code is available at: https://github.com/ibm-aur-nlp/adv-def-text-dist.
Hailstorm : A Statically-Typed, Purely Functional Language for IoT Applications
May 27, 2021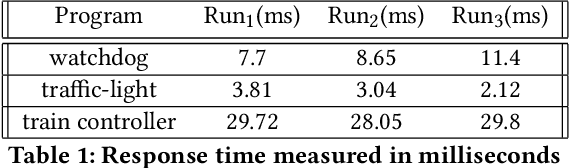
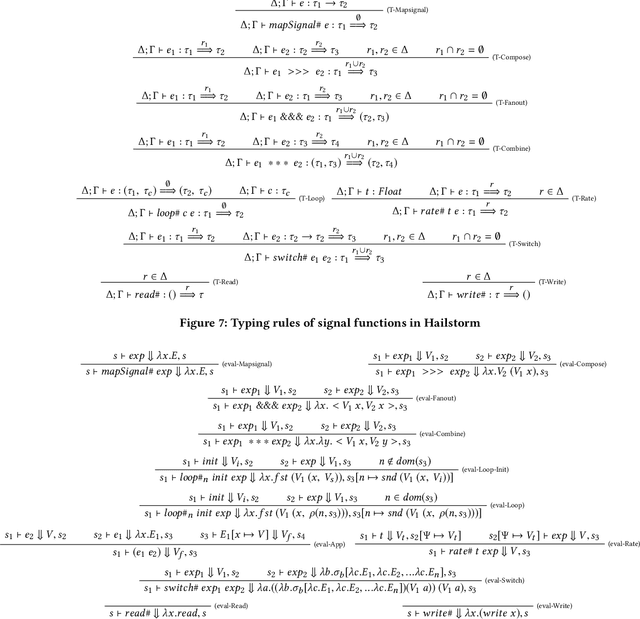
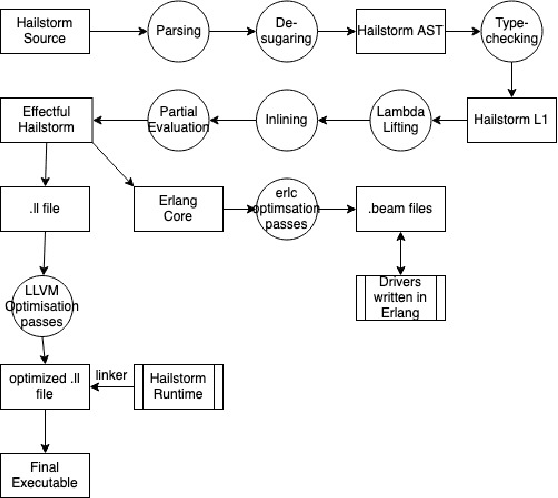
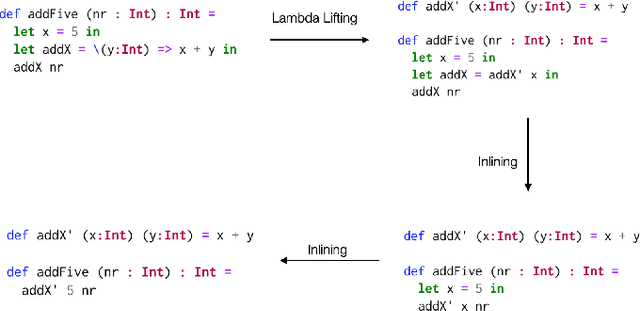
With the growing ubiquity of Internet of Things(IoT), more complex logic is being programmed on resource-constrained IoT devices, almost exclusively using the C programming language. While C provides low-level control over memory, it lacks a number of high-level programming abstractions such as higher-order functions, polymorphism, strong static typing, memory safety, and automatic memory management. We present Hailstorm, a statically-typed, purely functional programming language that attempts to address the above problem. It is a high-level programming language with a strict typing discipline. It supports features like higher-order functions, tail-recursion, and automatic memory management, to program IoT devices in a declarative manner. Applications running on these devices tend to be heavily dominated by I/O. Hailstorm tracks side effects likeI/O in its type system using resource types. This choice allowed us to explore the design of a purely functional standalone language, in an area where it is more common to embed a functional core in an imperative shell. The language borrows the combinators of arrowized FRP, but has discrete-time semantics. The design of the full set of combinators is work in progress, driven by examples. So far, we have evaluated Hailstorm by writing standard examples from the literature (earthquake detection, a railway crossing system and various other clocked systems), and also running examples on the GRiSP embedded systems board, through generation of Erlang.
Robot Development and Path Planning for Indoor Ultraviolet Light Disinfection
Apr 12, 2021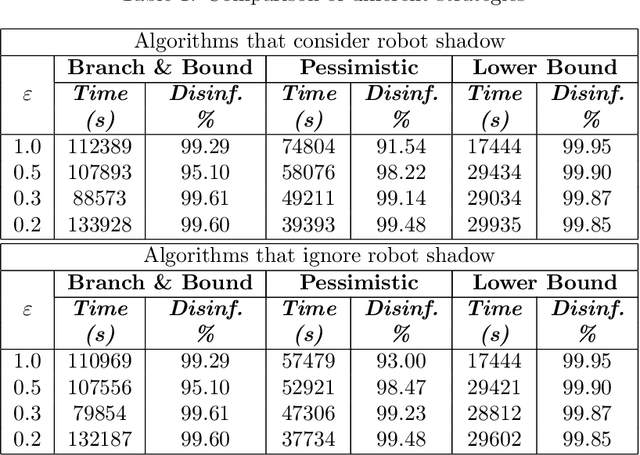
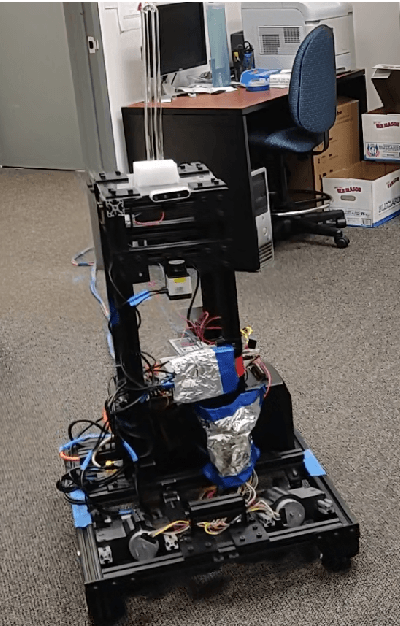
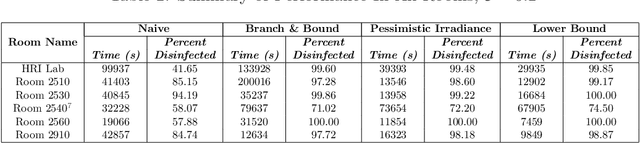
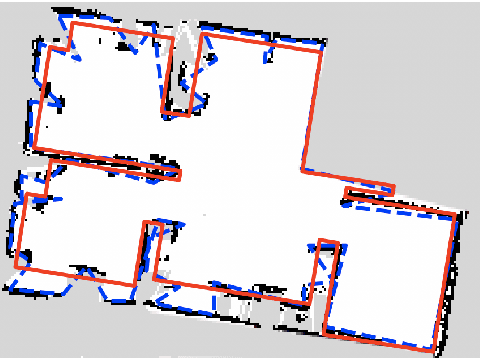
Regular irradiation of indoor environments with ultraviolet C (UVC) light has become a regular task for many indoor settings as a result of COVID-19, but current robotic systems attempting to automate it suffer from high costs and inefficient irradiation. In this paper, we propose a purpose-made inexpensive robotic platform with off-the-shelf components and standard navigation software that, with a novel algorithm for finding optimal irradiation locations, addresses both shortcomings to offer affordable and efficient solutions for UVC irradiation. We demonstrate in simulations the efficacy of the algorithm and show a prototypical run of the autonomous integrated robotic system in an indoor environment. In our sample instances, our proposed algorithm reduces the time needed by roughly 30\% while it increases the coverage by a factor of 35\% (when compared to the best possible placement of a static light).
OBTAIN: Real-Time Beat Tracking in Audio Signals
Oct 27, 2017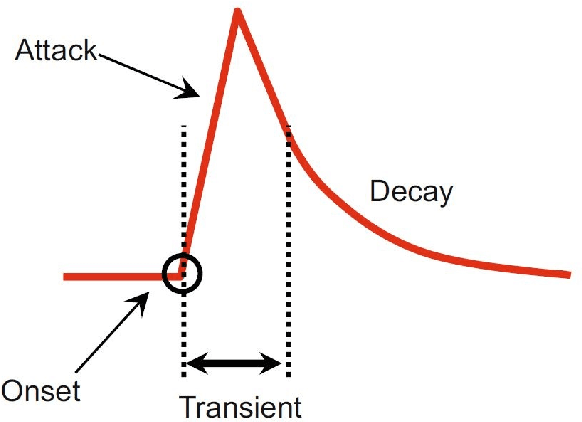
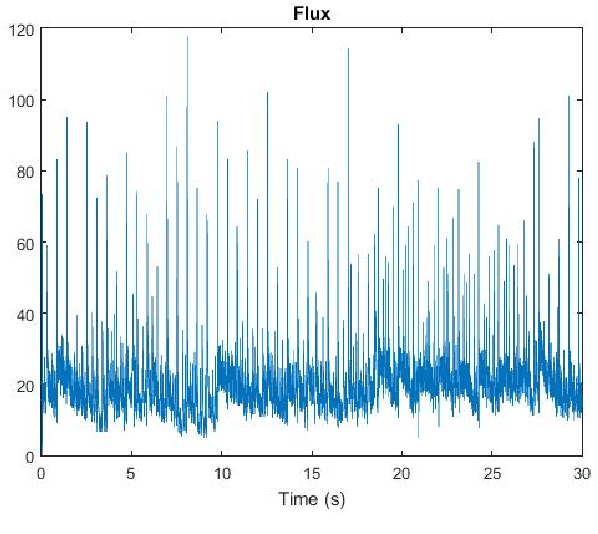
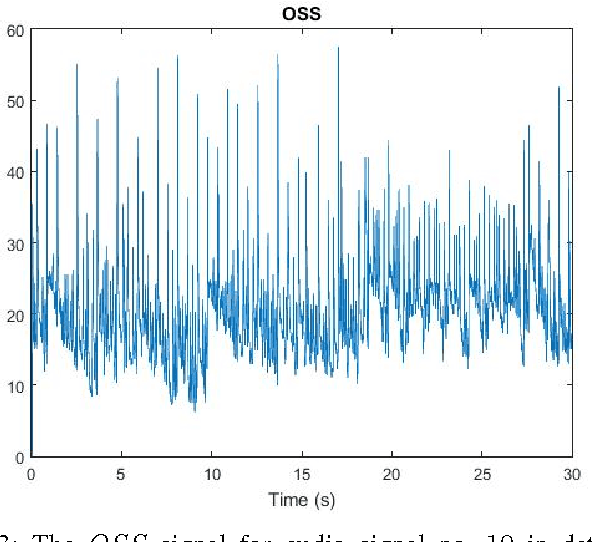
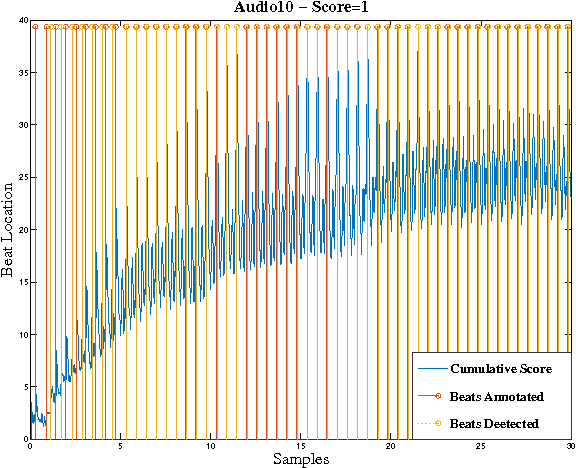
In this paper, we design a system in order to perform the real-time beat tracking for an audio signal. We use Onset Strength Signal (OSS) to detect the onsets and estimate the tempos. Then, we form Cumulative Beat Strength Signal (CBSS) by taking advantage of OSS and estimated tempos. Next, we perform peak detection by extracting the periodic sequence of beats among all CBSS peaks. In simulations, we can see that our proposed algorithm, Online Beat TrAckINg (OBTAIN), outperforms state-of-art results in terms of prediction accuracy while maintaining comparable and practical computational complexity. The real-time performance is tractable visually as illustrated in the simulations.
Learning robust speech representation with an articulatory-regularized variational autoencoder
Apr 07, 2021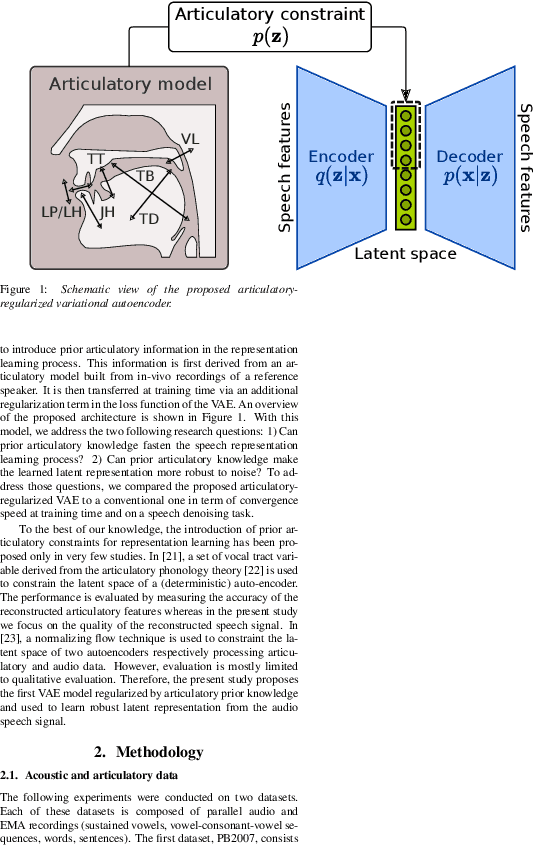
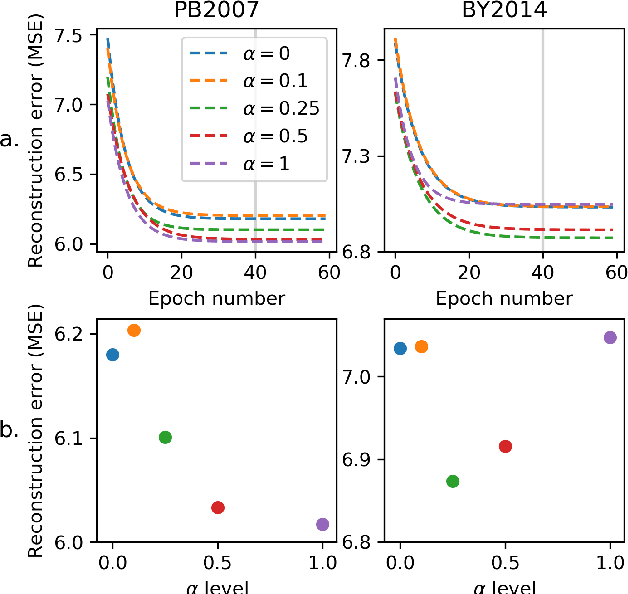
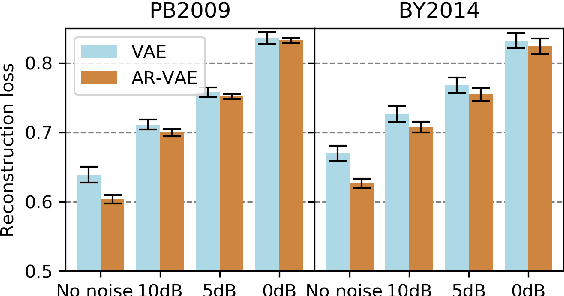
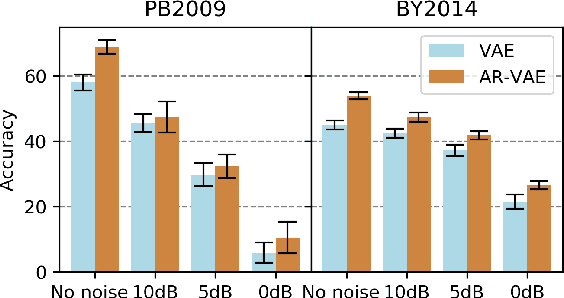
It is increasingly considered that human speech perception and production both rely on articulatory representations. In this paper, we investigate whether this type of representation could improve the performances of a deep generative model (here a variational autoencoder) trained to encode and decode acoustic speech features. First we develop an articulatory model able to associate articulatory parameters describing the jaw, tongue, lips and velum configurations with vocal tract shapes and spectral features. Then we incorporate these articulatory parameters into a variational autoencoder applied on spectral features by using a regularization technique that constraints part of the latent space to follow articulatory trajectories. We show that this articulatory constraint improves model training by decreasing time to convergence and reconstruction loss at convergence, and yields better performance in a speech denoising task.
Multitask Recalibrated Aggregation Network for Medical Code Prediction
Apr 02, 2021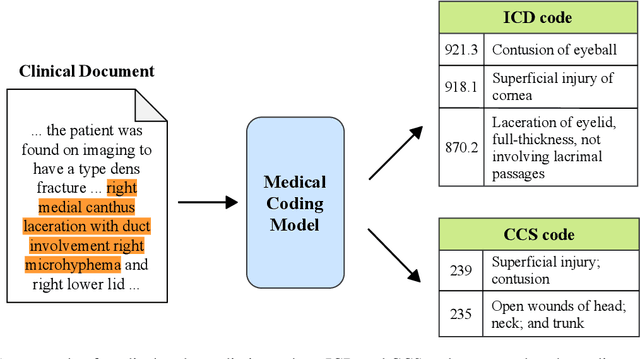
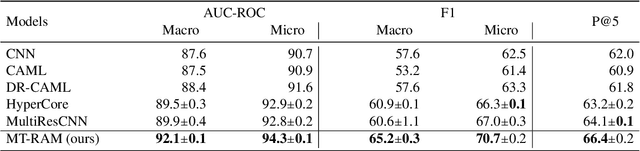
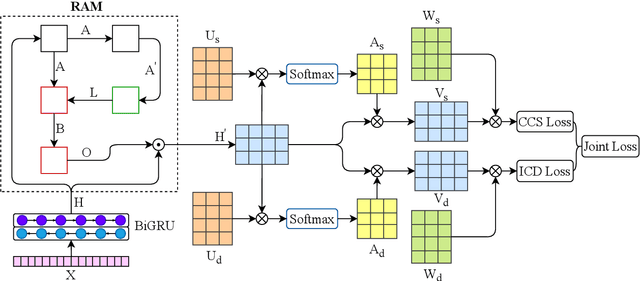
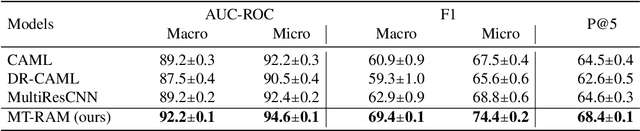
Medical coding translates professionally written medical reports into standardized codes, which is an essential part of medical information systems and health insurance reimbursement. Manual coding by trained human coders is time-consuming and error-prone. Thus, automated coding algorithms have been developed, building especially on the recent advances in machine learning and deep neural networks. To solve the challenges of encoding lengthy and noisy clinical documents and capturing code associations, we propose a multitask recalibrated aggregation network. In particular, multitask learning shares information across different coding schemes and captures the dependencies between different medical codes. Feature recalibration and aggregation in shared modules enhance representation learning for lengthy notes. Experiments with a real-world MIMIC-III dataset show significantly improved predictive performance.
FPT Approximation for Socially Fair Clustering
Jun 12, 2021In this work, we study the socially fair $k$-median/$k$-means problem. We are given a set of points $P$ in a metric space $\mathcal{X}$ with a distance function $d(.,.)$. There are $\ell$ groups: $P_1,\dotsc,P_{\ell} \subseteq P$. We are also given a set $F$ of feasible centers in $\mathcal{X}$. The goal of the socially fair $k$-median problem is to find a set $C \subseteq F$ of $k$ centers that minimizes the maximum average cost over all the groups. That is, find $C$ that minimizes the objective function $\Phi(C,P) \equiv \max_{j} \sum_{x \in P_j} d(C,x)/|P_j|$, where $d(C,x)$ is the distance of $x$ to the closest center in $C$. The socially fair $k$-means problem is defined similarly by using squared distances, i.e., $d^{2}(.,.)$ instead of $d(.,.)$. In this work, we design $(5+\varepsilon)$ and $(33 + \varepsilon)$ approximation algorithms for the socially fair $k$-median and $k$-means problems, respectively. For the parameters: $k$ and $\ell$, the algorithms have an FPT (fixed parameter tractable) running time of $f(k,\ell,\varepsilon) \cdot n$ for $f(k,\ell,\varepsilon) = 2^{{O}(k \, \ell/\varepsilon)}$ and $n = |P \cup F|$. We also study a special case of the problem where the centers are allowed to be chosen from the point set $P$, i.e., $P \subseteq F$. For this special case, our algorithms give better approximation guarantees of $(4+\varepsilon)$ and $(18+\varepsilon)$ for the socially fair $k$-median and $k$-means problems, respectively. Furthermore, we convert these algorithms to constant pass log-space streaming algorithms. Lastly, we show FPT hardness of approximation results for the problem with a small gap between our upper and lower bounds.
A Localization and Navigation Method for an In-pipe Robot in Water Distribution System through Wireless Control towards Long-Distance Inspection
May 21, 2021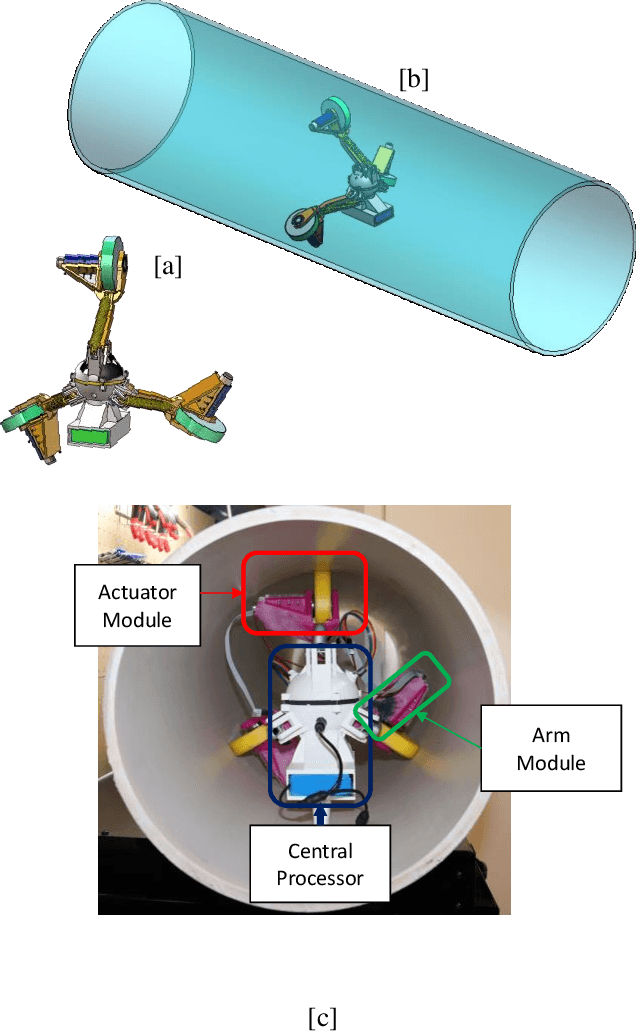
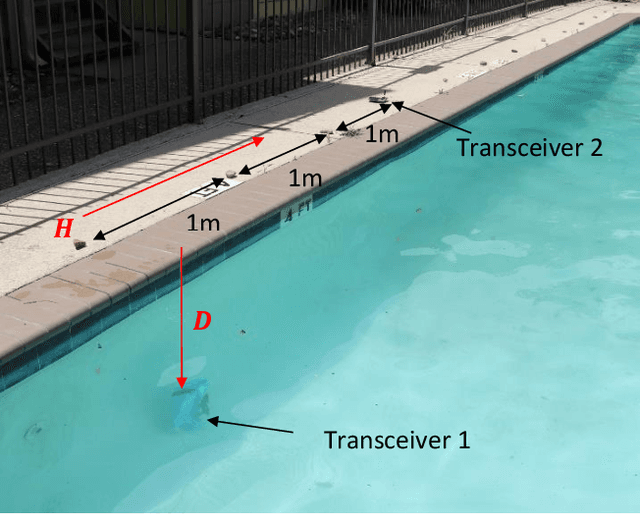
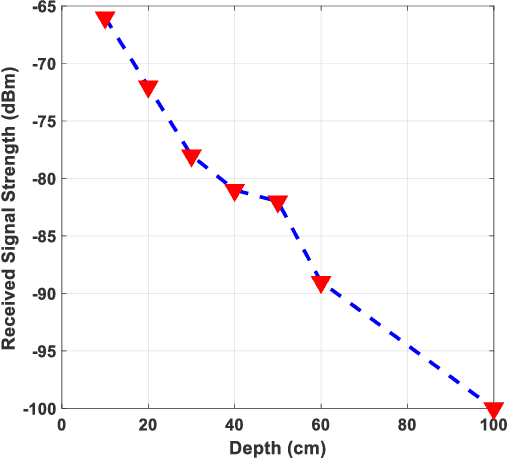
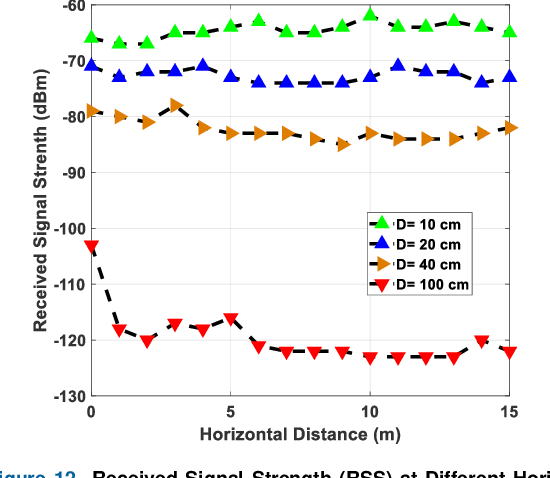
In this paper, we propose an operation procedure for our previously developed in-pipe robotic system that is used for water quality monitoring in water distribution systems (WDS). The proposed operation procedure synchronizes a developed wireless communication system that is suitable for harsh environments of soil, water, and rock with a multi-phase control algorithm. The new wireless control algorithm facilitates smart navigation and near real-time wireless data transmission during operation for our in-pipe robot in WDS. The smart navigation enables the robot to pass through different configurations of the pipeline with long inspection capability with a battery in which is mounted on the robot. To this end, we have divided the operation procedure into five steps that assign a specific motion control phase and wireless communication task to the robot. We describe each step and the algorithm associated with that step in this paper. The proposed robotic system defines the configuration type in each pipeline with the pre-programmed pipeline map that is given to the robot before the operation and the wireless communication system. The wireless communication system includes some relay nodes that perform bi-directional communication in the operation procedure. The developed wireless robotic system along with operation procedure facilitates localization and navigation for the robot toward long-distance inspection in WDS.
An Intelligent Model for Solving Manpower Scheduling Problems
May 07, 2021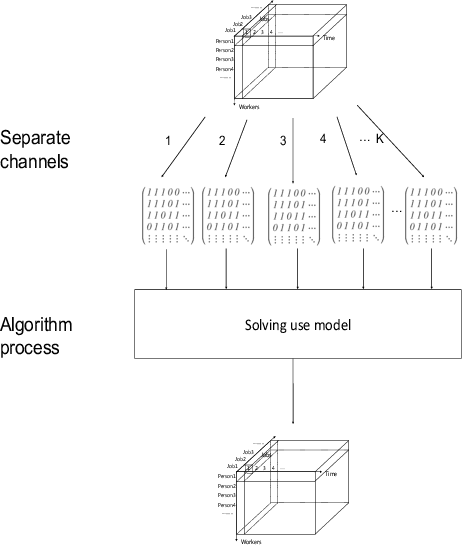
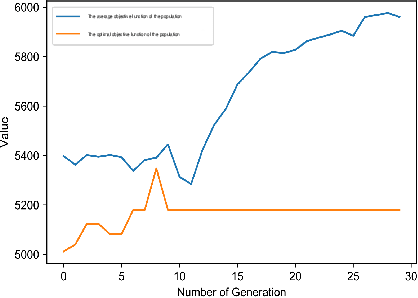
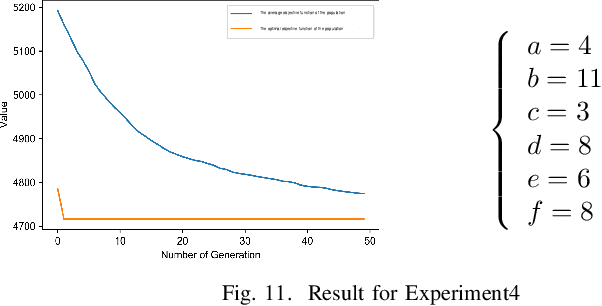
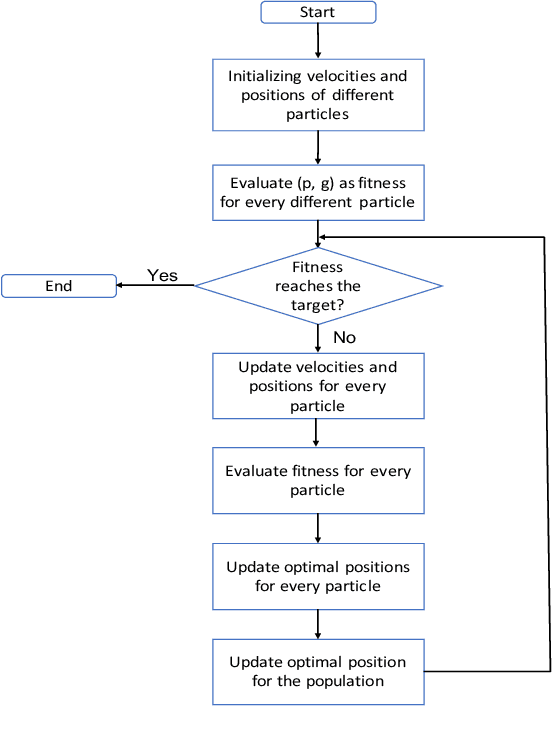
The manpower scheduling problem is a critical research field in the resource management area. Based on the existing studies on scheduling problem solutions, this paper transforms the manpower scheduling problem into a combinational optimization problem under multi-constraint conditions from a new perspective. It also uses logical paradigms to build a mathematical model for problem solution and an improved multi-dimensional evolution algorithm for solving the model. Moreover, the constraints discussed in this paper basically cover all the requirements of human resource coordination in modern society and are supported by our experiment results. In the discussion part, we compare our model with other heuristic algorithms or linear programming methods and prove that the model proposed in this paper makes a 25.7% increase in efficiency and a 17% increase in accuracy at most. In addition, to the numerical solution of the manpower scheduling problem, this paper also studies the algorithm for scheduling task list generation and the method of displaying scheduling results. As a result, we not only provide various modifications for the basic algorithm to solve different condition problems but also propose a new algorithm that increases at least 28.91% in time efficiency by comparing with different baseline models.
* none
SPM-Tracker: Series-Parallel Matching for Real-Time Visual Object Tracking
Apr 09, 2019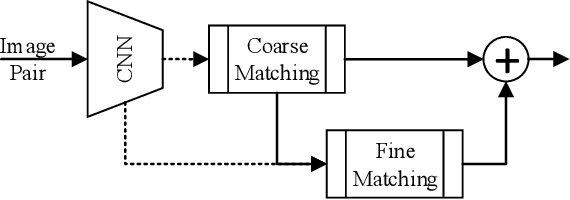
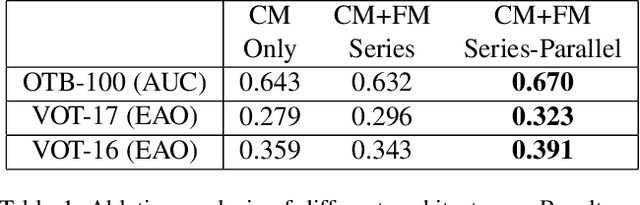
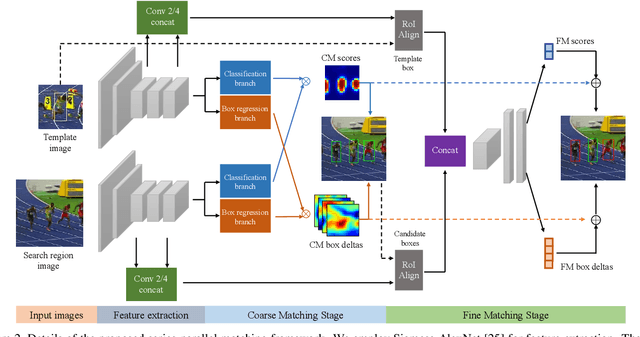
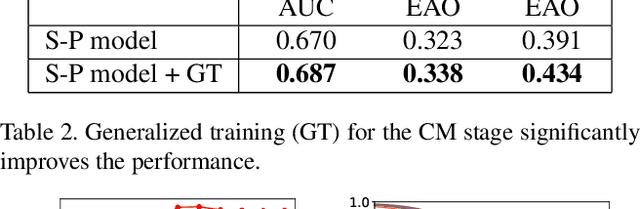
The greatest challenge facing visual object tracking is the simultaneous requirements on robustness and discrimination power. In this paper, we propose a SiamFC-based tracker, named SPM-Tracker, to tackle this challenge. The basic idea is to address the two requirements in two separate matching stages. Robustness is strengthened in the coarse matching (CM) stage through generalized training while discrimination power is enhanced in the fine matching (FM) stage through a distance learning network. The two stages are connected in series as the input proposals of the FM stage are generated by the CM stage. They are also connected in parallel as the matching scores and box location refinements are fused to generate the final results. This innovative series-parallel structure takes advantage of both stages and results in superior performance. The proposed SPM-Tracker, running at 120fps on GPU, achieves an AUC of 0.687 on OTB-100 and an EAO of 0.434 on VOT-16, exceeding other real-time trackers by a notable margin.