 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Compute and memory efficient universal sound source separation
Mar 03, 2021
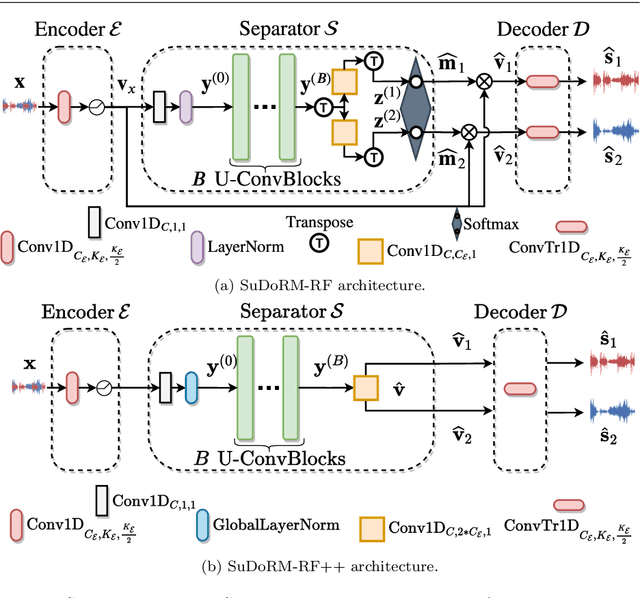
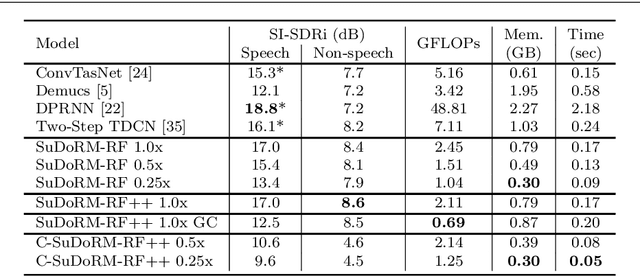
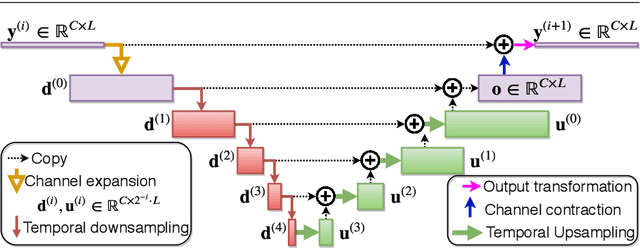
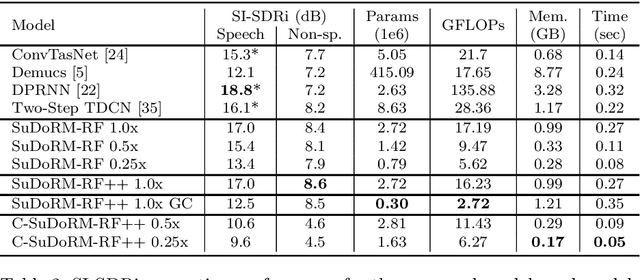
Recent progress in audio source separation lead by deep learning has enabled many neural network models to provide robust solutions to this fundamental estimation problem. In this study, we provide a family of efficient neural network architectures for general purpose audio source separation while focusing on multiple computational aspects that hinder the application of neural networks in real-world scenarios. The backbone structure of this convolutional network is the SUccessive DOwnsampling and Resampling of Multi-Resolution Features (SuDoRM-RF) as well as their aggregation which is performed through simple one-dimensional convolutions. This mechanism enables our models to obtain high fidelity signal separation in a wide variety of settings where variable number of sources are present and with limited computational resources (e.g. floating point operations, memory footprint, number of parameters and latency). Our experiments show that SuDoRM-RF models perform comparably and even surpass several state-of-the-art benchmarks with significantly higher computational resource requirements. The causal variation of SuDoRM-RF is able to obtain competitive performance in real-time speech separation of around 10dB scale-invariant signal-to-distortion ratio improvement (SI-SDRi) while remaining up to 20 times faster than real-time on a laptop device.
Using latent space regression to analyze and leverage compositionality in GANs
Mar 18, 2021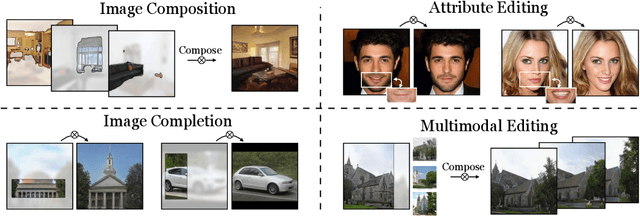


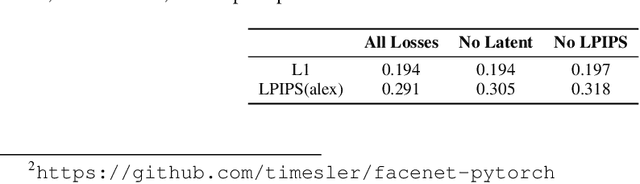
In recent years, Generative Adversarial Networks have become ubiquitous in both research and public perception, but how GANs convert an unstructured latent code to a high quality output is still an open question. In this work, we investigate regression into the latent space as a probe to understand the compositional properties of GANs. We find that combining the regressor and a pretrained generator provides a strong image prior, allowing us to create composite images from a collage of random image parts at inference time while maintaining global consistency. To compare compositional properties across different generators, we measure the trade-offs between reconstruction of the unrealistic input and image quality of the regenerated samples. We find that the regression approach enables more localized editing of individual image parts compared to direct editing in the latent space, and we conduct experiments to quantify this independence effect. Our method is agnostic to the semantics of edits, and does not require labels or predefined concepts during training. Beyond image composition, our method extends to a number of related applications, such as image inpainting or example-based image editing, which we demonstrate on several GANs and datasets, and because it uses only a single forward pass, it can operate in real-time. Code is available on our project page: https://chail.github.io/latent-composition/.
Robustifying $\ell_\infty$ Adversarial Training to the Union of Perturbation Models
May 31, 2021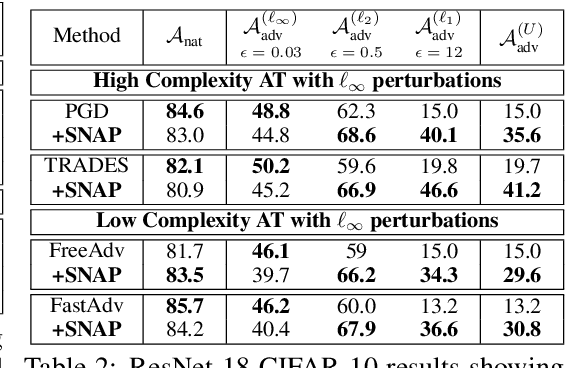
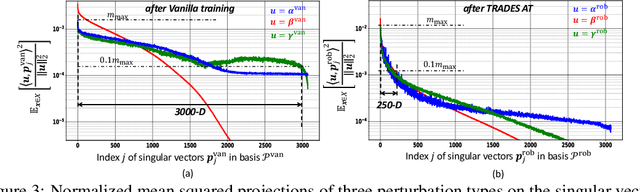
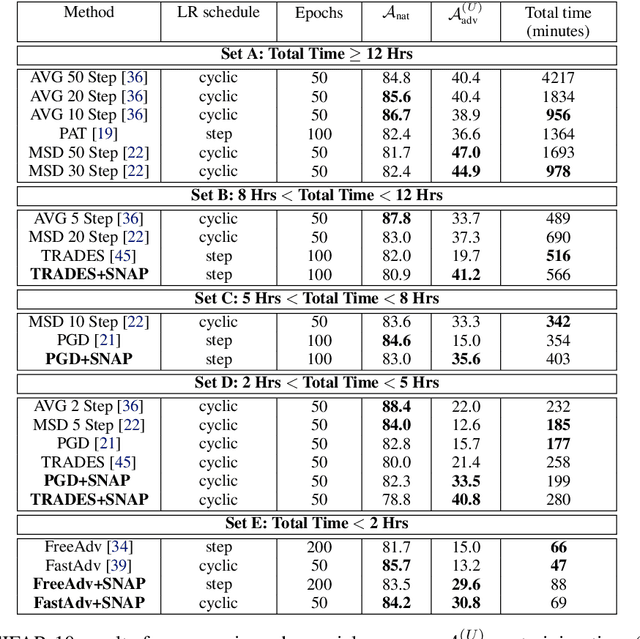
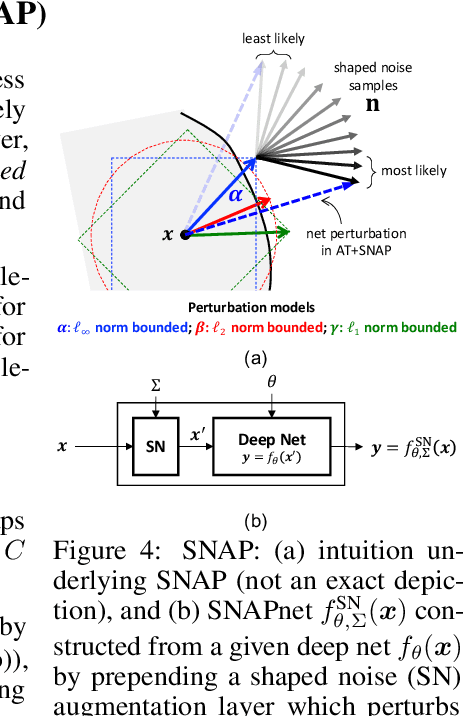
Classical adversarial training (AT) frameworks are designed to achieve high adversarial accuracy against a single attack type, typically $\ell_\infty$ norm-bounded perturbations. Recent extensions in AT have focused on defending against the union of multiple perturbations but this benefit is obtained at the expense of a significant (up to $10\times$) increase in training complexity over single-attack $\ell_\infty$ AT. In this work, we expand the capabilities of widely popular single-attack $\ell_\infty$ AT frameworks to provide robustness to the union of ($\ell_\infty, \ell_2, \ell_1$) perturbations while preserving their training efficiency. Our technique, referred to as Shaped Noise Augmented Processing (SNAP), exploits a well-established byproduct of single-attack AT frameworks -- the reduction in the curvature of the decision boundary of networks. SNAP prepends a given deep net with a shaped noise augmentation layer whose distribution is learned along with network parameters using any standard single-attack AT. As a result, SNAP enhances adversarial accuracy of ResNet-18 on CIFAR-10 against the union of ($\ell_\infty, \ell_2, \ell_1$) perturbations by 14%-to-20% for four state-of-the-art (SOTA) single-attack $\ell_\infty$ AT frameworks, and, for the first time, establishes a benchmark for ResNet-50 and ResNet-101 on ImageNet.
Moment-Based Exact Uncertainty Propagation Through Nonlinear Stochastic Autonomous Systems
Jan 29, 2021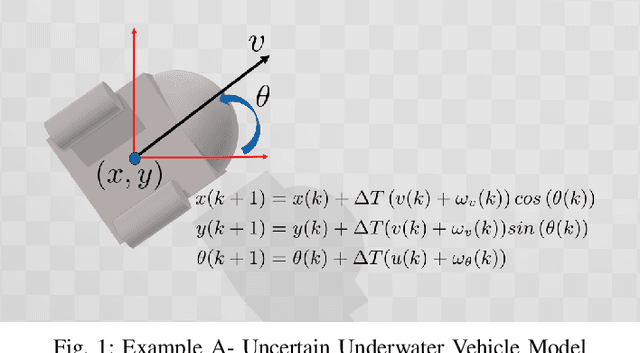
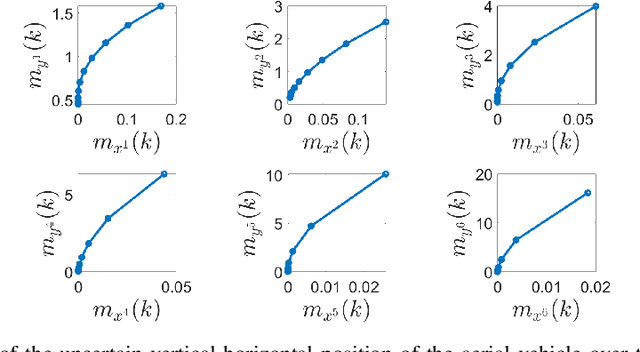
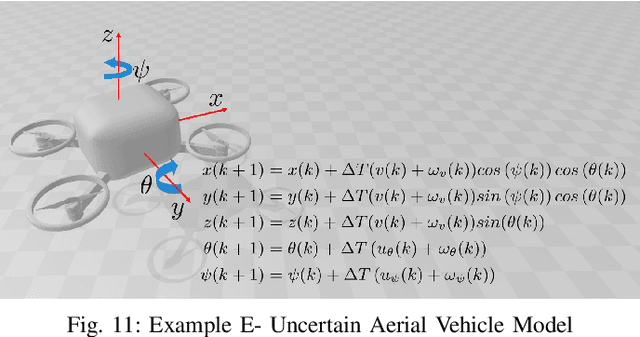
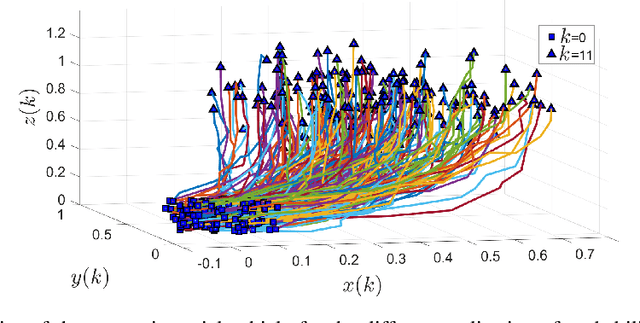
In this paper, we address the problem of uncertainty propagation through nonlinear stochastic dynamical systems. More precisely, given a discrete-time continuous-state probabilistic nonlinear dynamical system, we aim at finding the sequence of the moments of the probability distributions of the system states up to any desired order over the given planning horizon. Moments of uncertain states can be used in estimation, planning, control, and safety analysis of stochastic dynamical systems. Existing approaches to address moment propagation problems provide approximate descriptions of the moments and are mainly limited to particular set of uncertainties, e.g., Gaussian disturbances. In this paper, to describe the moments of uncertain states, we introduce trigonometric and also mixed-trigonometric-polynomial moments. Such moments allow us to obtain closed deterministic dynamical systems that describe the exact time evolution of the moments of uncertain states of an important class of autonomous and robotic systems including underwater, ground, and aerial vehicles, robotic arms and walking robots. Such obtained deterministic dynamical systems can be used, in a receding horizon fashion, to propagate the uncertainties over the planning horizon in real-time. To illustrate the performance of the proposed method, we benchmark our method against existing approaches including linear, unscented transformation, and sampling based uncertainty propagation methods that are widely used in estimation, prediction, planning, and control problems.
Accurate and fast matrix factorization for low-rank learning
May 03, 2021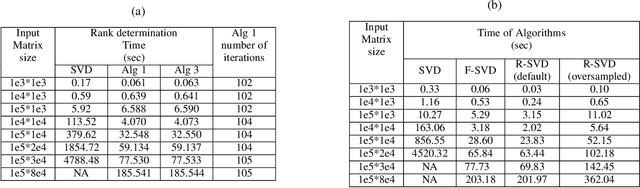
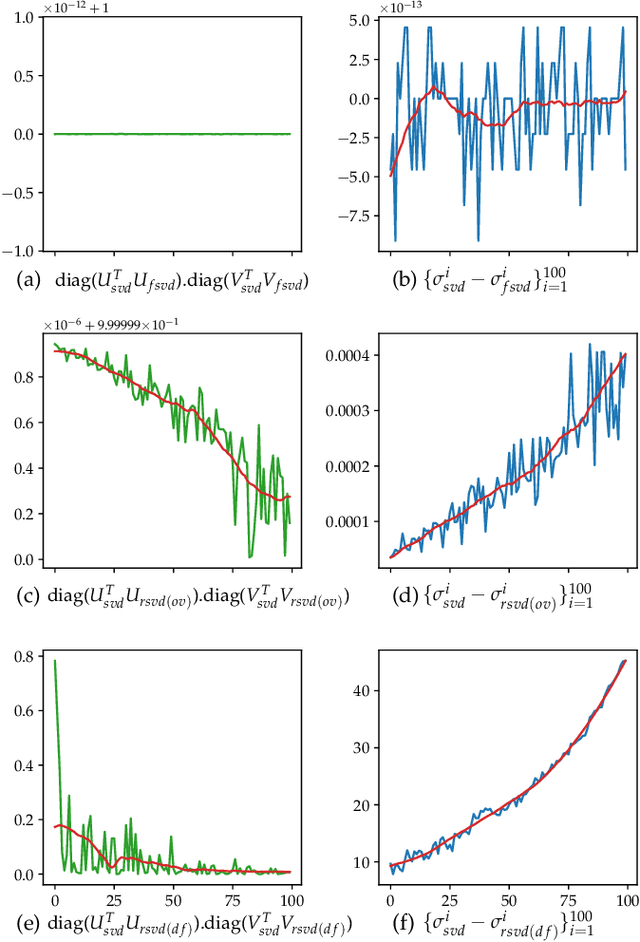
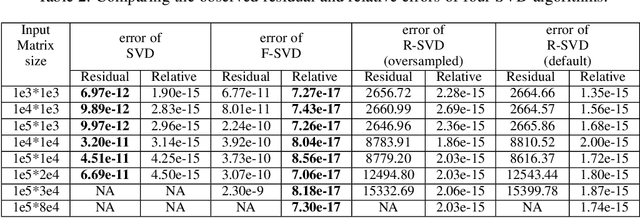
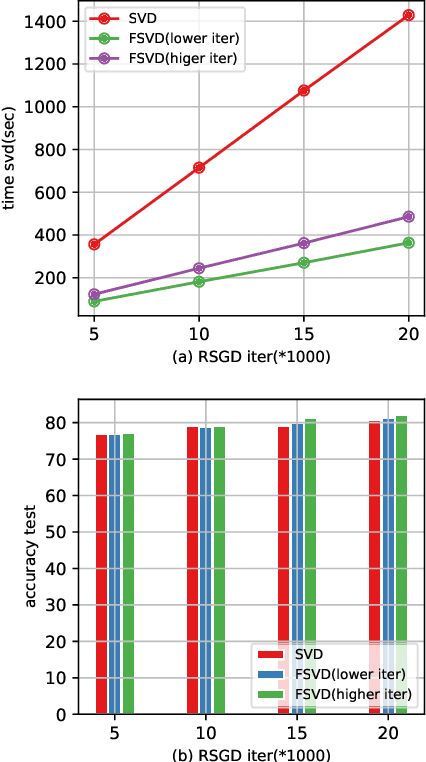
In this paper we tackle two important challenges related to the accurate partial singular value decomposition (SVD) and numerical rank estimation of a huge matrix to use in low-rank learning problems in a fast way. We use the concepts of Krylov subspaces such as the Golub-Kahan bidiagonalization process as well as Ritz vectors to achieve these goals. Our experiments identify various advantages of the proposed methods compared to traditional and randomized SVD (R-SVD) methods with respect to the accuracy of the singular values and corresponding singular vectors computed in a similar execution time. The proposed methods are appropriate for applications involving huge matrices where accuracy in all spectrum of the desired singular values, and also all of corresponding singular vectors is essential. We evaluate our method in the real application of Riemannian similarity learning (RSL) between two various image datasets of MNIST and USPS.
Day-ahead time series forecasting: application to capacity planning
Nov 06, 2018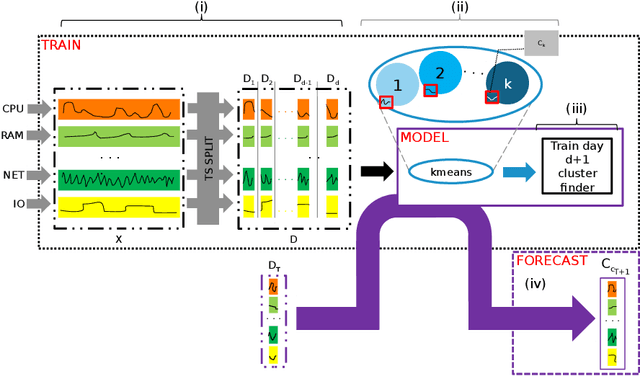
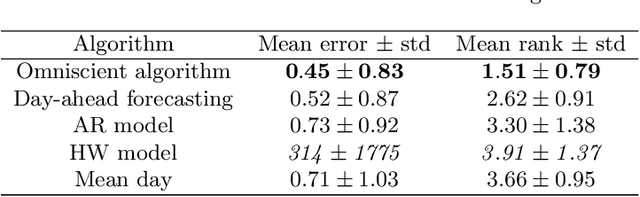
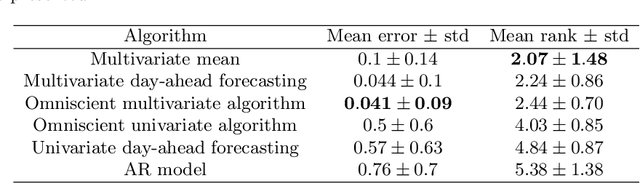
In the context of capacity planning, forecasting the evolution of informatics servers usage enables companies to better manage their computational resources. We address this problem by collecting key indicator time series and propose to forecast their evolution a day-ahead. Our method assumes that data is structured by a daily seasonality, but also that there is typical evolution of indicators within a day. Then, it uses the combination of a clustering algorithm and Markov Models to produce day-ahead forecasts. Our experiments on real datasets show that the data satisfies our assumption and that, in the case study, our method outperforms classical approaches (AR, Holt-Winters).
Global Transport for Fluid Reconstruction with Learned Self-Supervision
Apr 13, 2021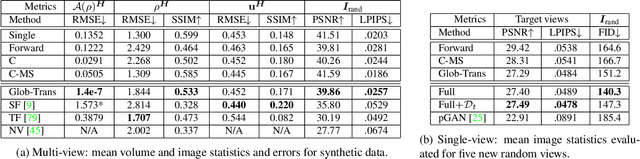
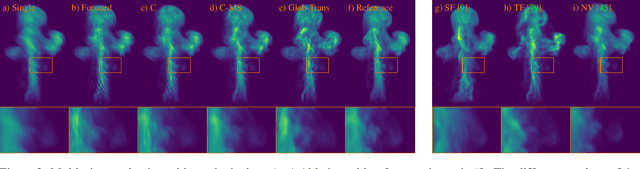
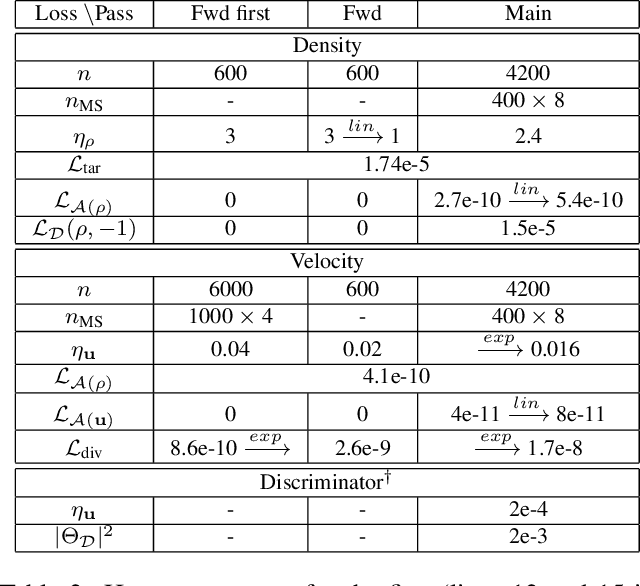
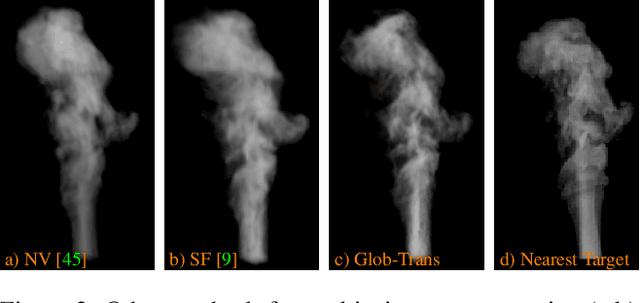
We propose a novel method to reconstruct volumetric flows from sparse views via a global transport formulation. Instead of obtaining the space-time function of the observations, we reconstruct its motion based on a single initial state. In addition we introduce a learned self-supervision that constrains observations from unseen angles. These visual constraints are coupled via the transport constraints and a differentiable rendering step to arrive at a robust end-to-end reconstruction algorithm. This makes the reconstruction of highly realistic flow motions possible, even from only a single input view. We show with a variety of synthetic and real flows that the proposed global reconstruction of the transport process yields an improved reconstruction of the fluid motion.
DeepMMSA: A Novel Multimodal Deep Learning Method for Non-small Cell Lung Cancer Survival Analysis
Jun 12, 2021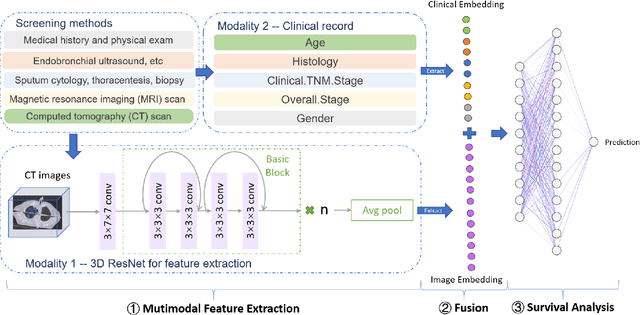
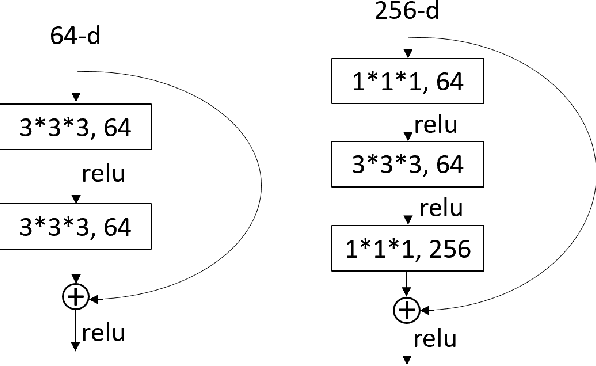
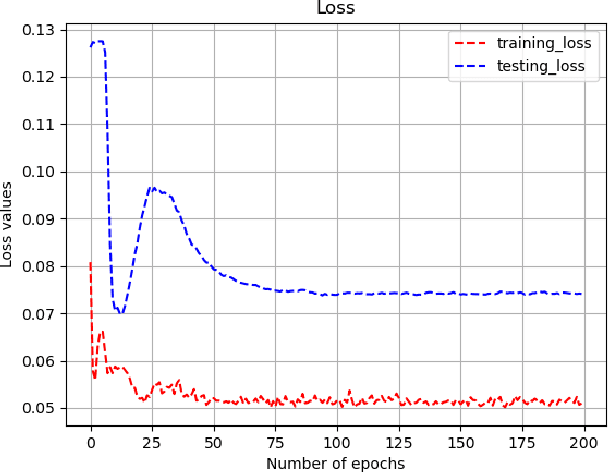
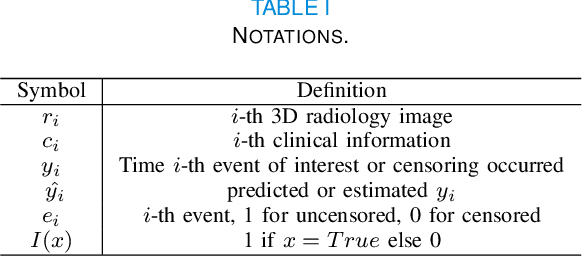
Lung cancer is the leading cause of cancer death worldwide. The critical reason for the deaths is delayed diagnosis and poor prognosis. With the accelerated development of deep learning techniques, it has been successfully applied extensively in many real-world applications, including health sectors such as medical image interpretation and disease diagnosis. By combining more modalities that being engaged in the processing of information, multimodal learning can extract better features and improve predictive ability. The conventional methods for lung cancer survival analysis normally utilize clinical data and only provide a statistical probability. To improve the survival prediction accuracy and help prognostic decision-making in clinical practice for medical experts, we for the first time propose a multimodal deep learning method for non-small cell lung cancer (NSCLC) survival analysis, named DeepMMSA. This method leverages CT images in combination with clinical data, enabling the abundant information hold within medical images to be associate with lung cancer survival information. We validate our method on the data of 422 NSCLC patients from The Cancer Imaging Archive (TCIA). Experimental results support our hypothesis that there is an underlying relationship between prognostic information and radiomic images. Besides, quantitative results showing that the established multimodal model can be applied to traditional method and has the potential to break bottleneck of existing methods and increase the the percentage of concordant pairs(right predicted pairs) in overall population by 4%.
UNiTE: Unitary N-body Tensor Equivariant Network with Applications to Quantum Chemistry
May 31, 2021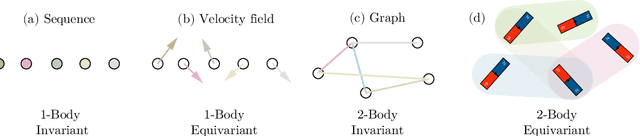
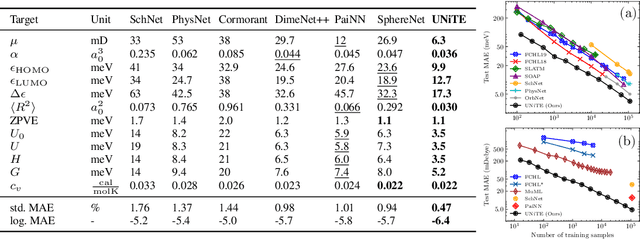
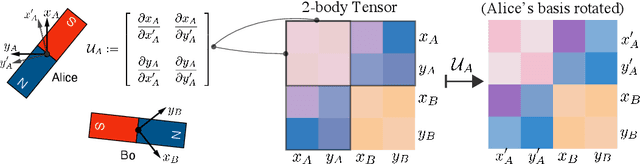
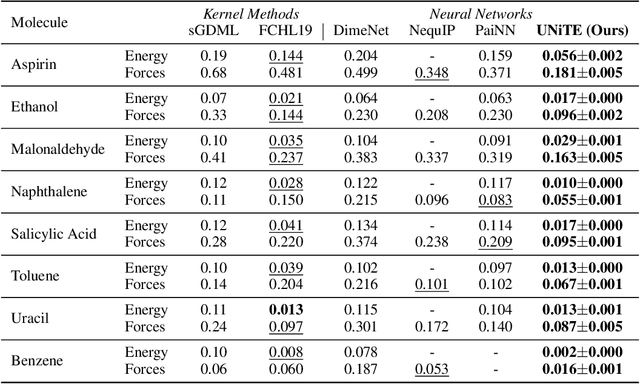
Equivariant neural networks have been successful in incorporating various types of symmetries, but are mostly limited to vector representations of geometric objects. Despite the prevalence of higher-order tensors in various application domains, e.g. in quantum chemistry, equivariant neural networks for general tensors remain unexplored. Previous strategies for learning equivariant functions on tensors mostly rely on expensive tensor factorization which is not scalable when the dimensionality of the problem becomes large. In this work, we propose unitary $N$-body tensor equivariant neural network (UNiTE), an architecture for a general class of symmetric tensors called $N$-body tensors. The proposed neural network is equivariant with respect to the actions of a unitary group, such as the group of 3D rotations. Furthermore, it has a linear time complexity with respect to the number of non-zero elements in the tensor. We also introduce a normalization method, viz., Equivariant Normalization, to improve generalization of the neural network while preserving symmetry. When applied to quantum chemistry, UNiTE outperforms all state-of-the-art machine learning methods of that domain with over 110% average improvements on multiple benchmarks. Finally, we show that UNiTE achieves a robust zero-shot generalization performance on diverse down stream chemistry tasks, while being three orders of magnitude faster than conventional numerical methods with competitive accuracy.
A Time-Dependent TSP Formulation for the Design of an Active Debris Removal Mission using Simulated Annealing
Sep 23, 2019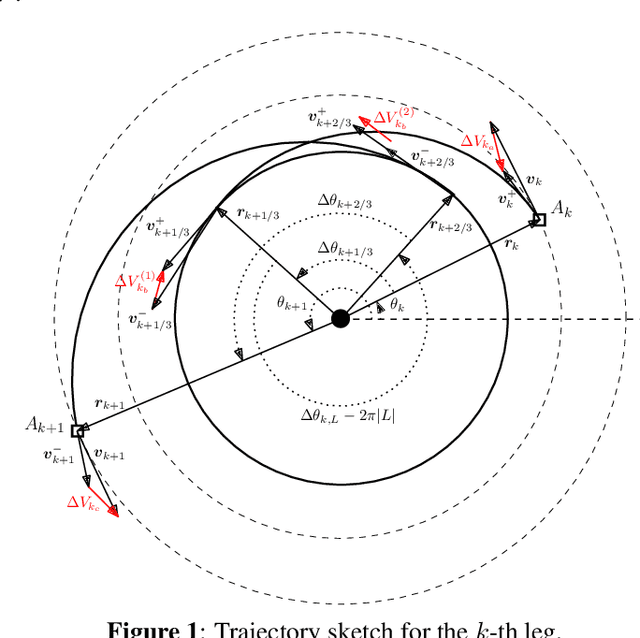
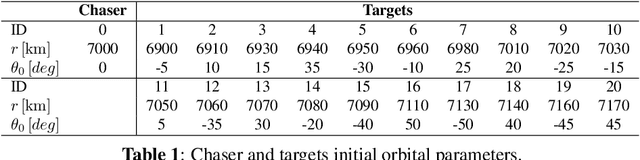
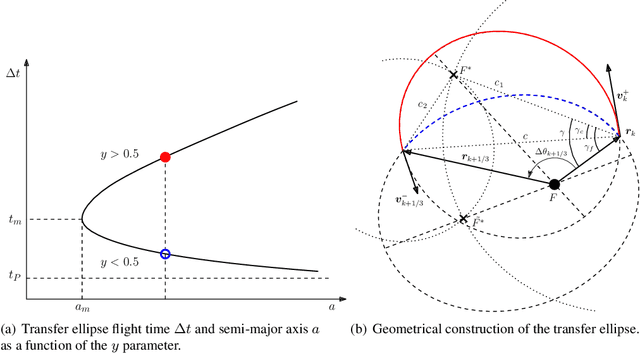

This paper proposes a formulation of the Active Debris Removal (ADR) Mission Design problem as a modified Time-Dependent Traveling Salesman Problem (TDTSP). The TDTSP is a well-known combinatorial optimization problem, whose solution is the cheapest mono-cyclic tour connecting a number of non-stationary cities in a map. The problem is tackled with an optimization procedure based on Simulated Annealing, that efficiently exploits a natural encoding and a careful choice of mutation operators. The developed algorithm is used to simultaneously optimize the targets sequence and the rendezvous epochs of an impulsive ADR mission. Numerical results are presented for sets comprising up to 20 targets.