 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A New Channel Estimation Strategy in Intelligent Reflecting Surface Assisted Networks
Jun 22, 2021
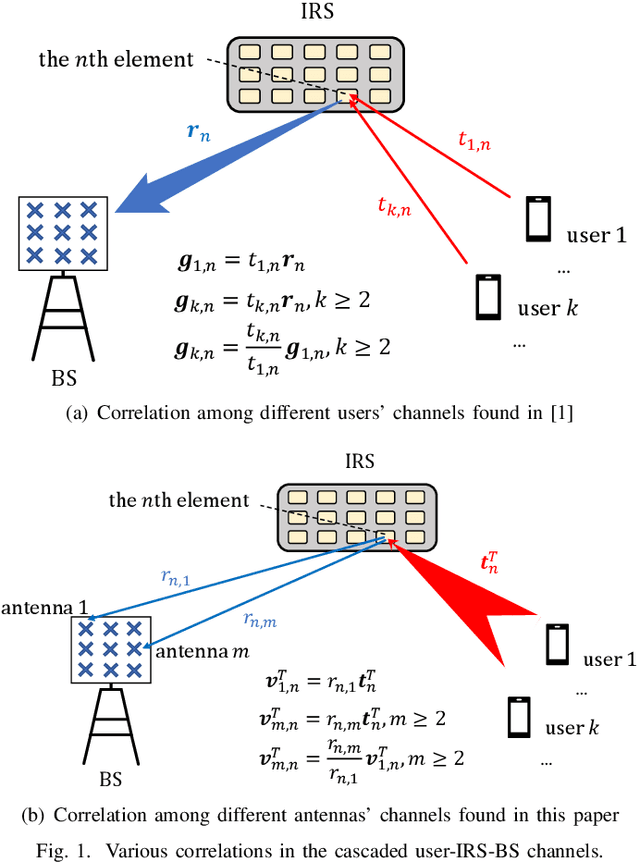
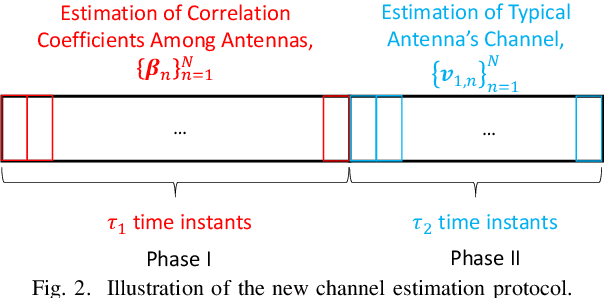
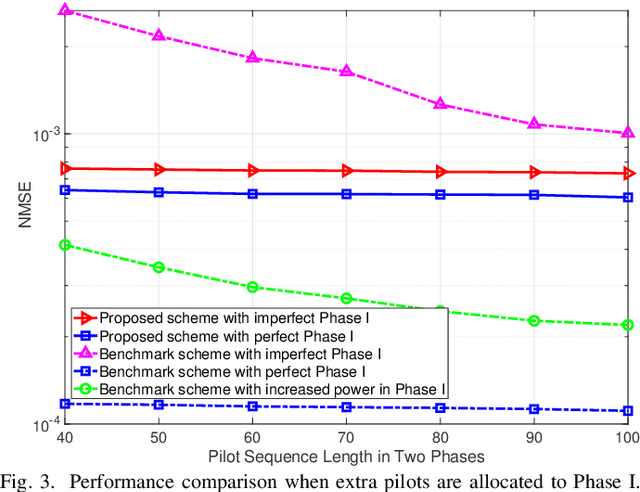
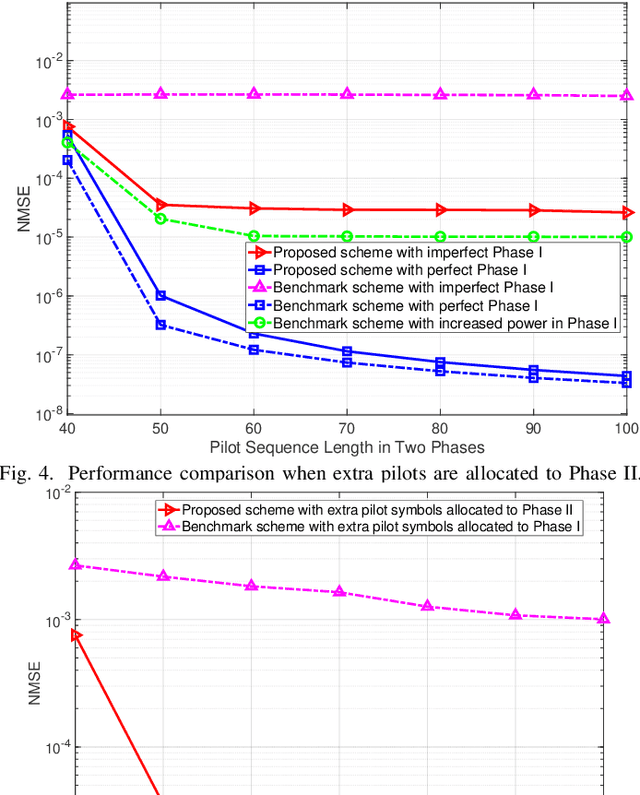
Channel estimation is the main hurdle to reaping the benefits promised by the intelligent reflecting surface (IRS), due to its absence of ability to transmit/receive pilot signals as well as the huge number of channel coefficients associated with its reflecting elements. Recently, a breakthrough was made in reducing the channel estimation overhead by revealing that the IRS-BS (base station) channels are common in the cascaded user-IRS-BS channels of all the users, and if the cascaded channel of one typical user is estimated, the other users' cascaded channels can be estimated very quickly based on their correlation with the typical user's channel \cite{b5}. One limitation of this strategy, however, is the waste of user energy, because many users need to keep silent when the typical user's channel is estimated. In this paper, we reveal another correlation hidden in the cascaded user-IRS-BS channels by observing that the user-IRS channel is common in all the cascaded channels from users to each BS antenna as well. Building upon this finding, we propose a novel two-phase channel estimation protocol in the uplink communication. Specifically, in Phase I, the correlation coefficients between the channels of a typical BS antenna and those of the other antennas are estimated; while in Phase II, the cascaded channel of the typical antenna is estimated. In particular, all the users can transmit throughput Phase I and Phase II. Under this strategy, it is theoretically shown that the minimum number of time instants required for perfect channel estimation is the same as that of the aforementioned strategy in the ideal case without BS noise. Then, in the case with BS noise, we show by simulation that the channel estimation error of our proposed scheme is significantly reduced thanks to the full exploitation of the user energy.
Learning Two Layer Rectified Neural Networks in Polynomial Time
Nov 05, 2018Consider the following fundamental learning problem: given input examples $x \in \mathbb{R}^d$ and their vector-valued labels, as defined by an underlying generative neural network, recover the weight matrices of this network. We consider two-layer networks, mapping $\mathbb{R}^d$ to $\mathbb{R}^m$, with $k$ non-linear activation units $f(\cdot)$, where $f(x) = \max \{x , 0\}$ is the ReLU. Such a network is specified by two weight matrices, $\mathbf{U}^* \in \mathbb{R}^{m \times k}, \mathbf{V}^* \in \mathbb{R}^{k \times d}$, such that the label of an example $x \in \mathbb{R}^{d}$ is given by $\mathbf{U}^* f(\mathbf{V}^* x)$, where $f(\cdot)$ is applied coordinate-wise. Given $n$ samples as a matrix $\mathbf{X} \in \mathbb{R}^{d \times n}$ and the (possibly noisy) labels $\mathbf{U}^* f(\mathbf{V}^* \mathbf{X}) + \mathbf{E}$ of the network on these samples, where $\mathbf{E}$ is a noise matrix, our goal is to recover the weight matrices $\mathbf{U}^*$ and $\mathbf{V}^*$. In this work, we develop algorithms and hardness results under varying assumptions on the input and noise. Although the problem is NP-hard even for $k=2$, by assuming Gaussian marginals over the input $\mathbf{X}$ we are able to develop polynomial time algorithms for the approximate recovery of $\mathbf{U}^*$ and $\mathbf{V}^*$. Perhaps surprisingly, in the noiseless case our algorithms recover $\mathbf{U}^*,\mathbf{V}^*$ exactly, i.e., with no error. To the best of the our knowledge, this is the first algorithm to accomplish exact recovery. For the noisy case, we give the first polynomial time algorithm that approximately recovers the weights in the presence of mean-zero noise $\mathbf{E}$. Our algorithms generalize to a larger class of rectified activation functions, $f(x) = 0$ when $x\leq 0$, and $f(x) > 0$ otherwise.
Attention-augmented Spatio-Temporal Segmentation for Land Cover Mapping
May 02, 2021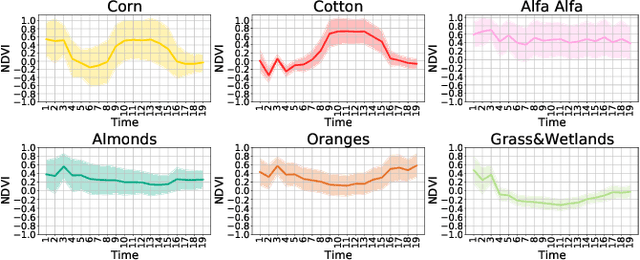
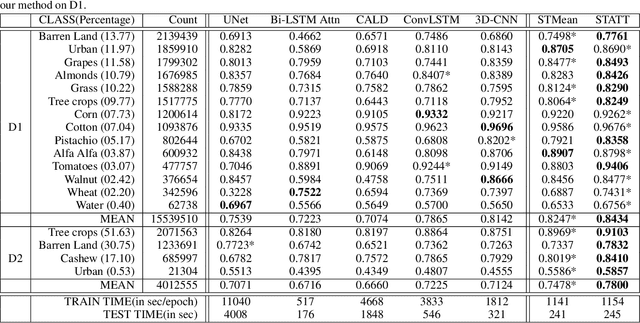
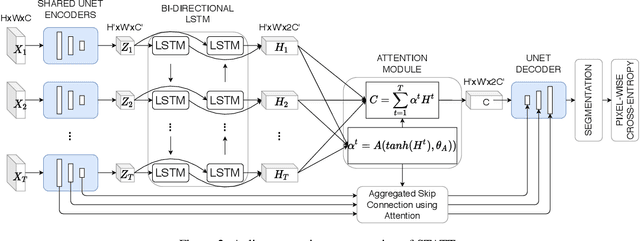
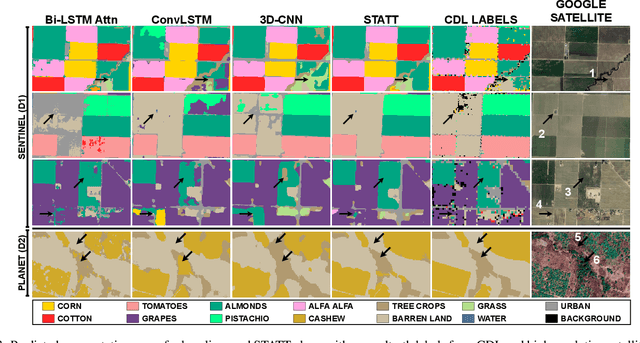
The availability of massive earth observing satellite data provide huge opportunities for land use and land cover mapping. However, such mapping effort is challenging due to the existence of various land cover classes, noisy data, and the lack of proper labels. Also, each land cover class typically has its own unique temporal pattern and can be identified only during certain periods. In this article, we introduce a novel architecture that incorporates the UNet structure with Bidirectional LSTM and Attention mechanism to jointly exploit the spatial and temporal nature of satellite data and to better identify the unique temporal patterns of each land cover. We evaluate this method for mapping crops in multiple regions over the world. We compare our method with other state-of-the-art methods both quantitatively and qualitatively on two real-world datasets which involve multiple land cover classes. We also visualise the attention weights to study its effectiveness in mitigating noise and identifying discriminative time period.
Dynamic Graph Collaborative Filtering
Jan 08, 2021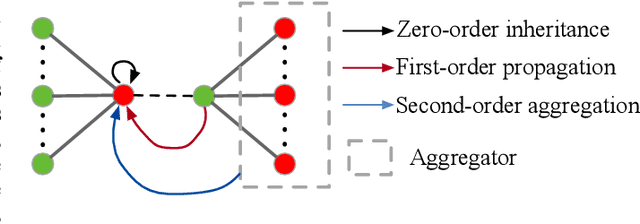
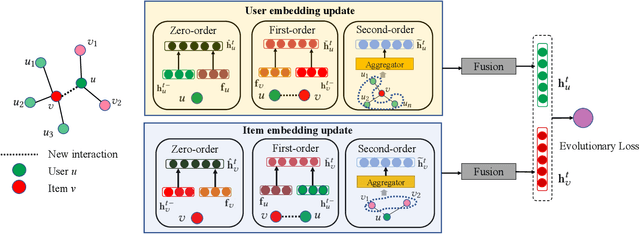
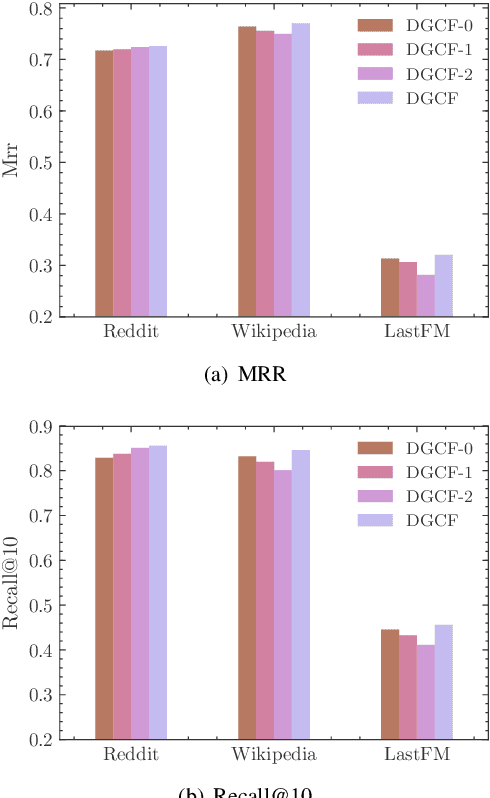
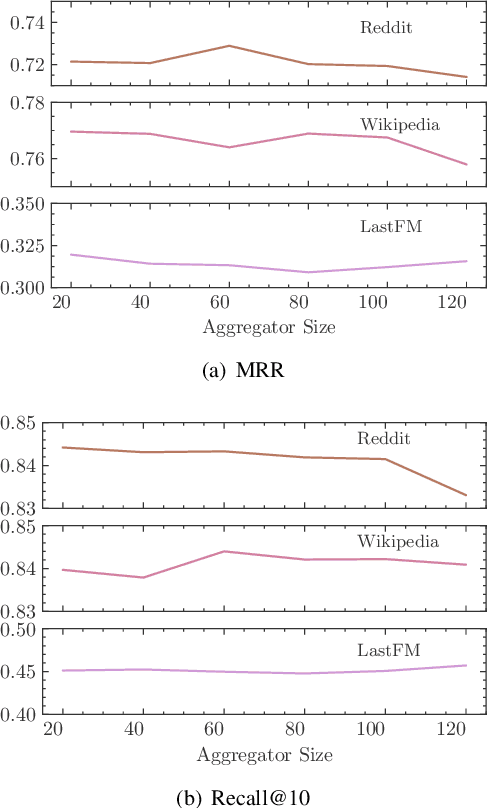
Dynamic recommendation is essential for modern recommender systems to provide real-time predictions based on sequential data. In real-world scenarios, the popularity of items and interests of users change over time. Based on this assumption, many previous works focus on interaction sequences and learn evolutionary embeddings of users and items. However, we argue that sequence-based models are not able to capture collaborative information among users and items directly. Here we propose Dynamic Graph Collaborative Filtering (DGCF), a novel framework leveraging dynamic graphs to capture collaborative and sequential relations of both items and users at the same time. We propose three update mechanisms: zero-order 'inheritance', first-order 'propagation', and second-order 'aggregation', to represent the impact on a user or item when a new interaction occurs. Based on them, we update related user and item embeddings simultaneously when interactions occur in turn, and then use the latest embeddings to make recommendations. Extensive experiments conducted on three public datasets show that DGCF significantly outperforms the state-of-the-art dynamic recommendation methods up to 30. Our approach achieves higher performance when the dataset contains less action repetition, indicating the effectiveness of integrating dynamic collaborative information.
Contrastive Explanations for Explaining Model Adaptations
Apr 07, 2021Many decision making systems deployed in the real world are not static - a phenomenon known as model adaptation takes place over time. The need for transparency and interpretability of AI-based decision models is widely accepted and thus have been worked on extensively. Usually, explanation methods assume a static system that has to be explained. Explaining non-static systems is still an open research question, which poses the challenge how to explain model adaptations. In this contribution, we propose and (empirically) evaluate a framework for explaining model adaptations by contrastive explanations. We also propose a method for automatically finding regions in data space that are affected by a given model adaptation and thus should be explained.
Active Screening for Recurrent Diseases: A Reinforcement Learning Approach
Jan 07, 2021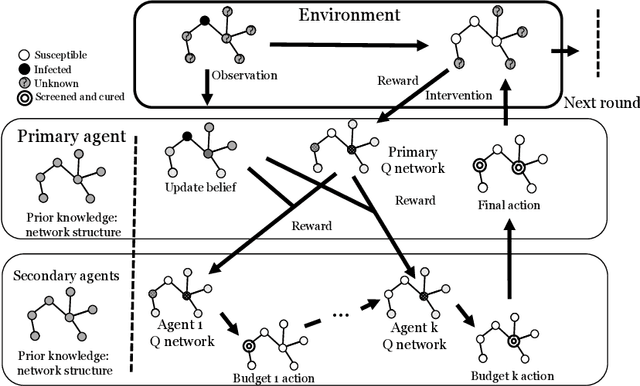
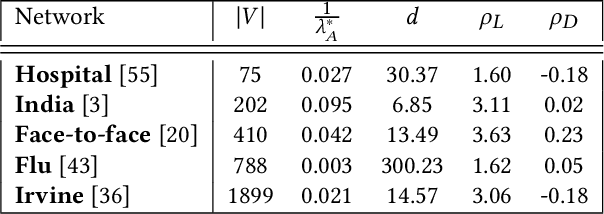
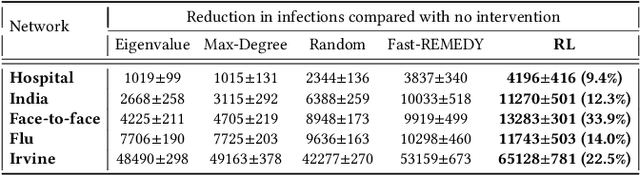
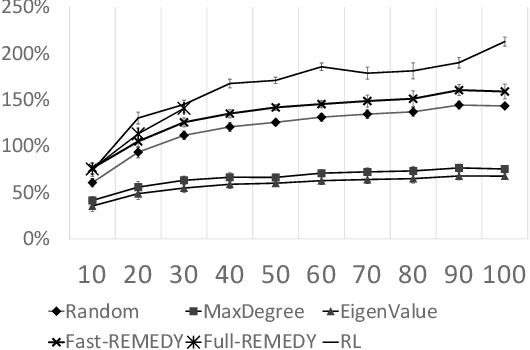
Active screening is a common approach in controlling the spread of recurring infectious diseases such as tuberculosis and influenza. In this approach, health workers periodically select a subset of population for screening. However, given the limited number of health workers, only a small subset of the population can be visited in any given time period. Given the recurrent nature of the disease and rapid spreading, the goal is to minimize the number of infections over a long time horizon. Active screening can be formalized as a sequential combinatorial optimization over the network of people and their connections. The main computational challenges in this formalization arise from i) the combinatorial nature of the problem, ii) the need of sequential planning and iii) the uncertainties in the infectiousness states of the population. Previous works on active screening fail to scale to large time horizon while fully considering the future effect of current interventions. In this paper, we propose a novel reinforcement learning (RL) approach based on Deep Q-Networks (DQN), with several innovative adaptations that are designed to address the above challenges. First, we use graph convolutional networks (GCNs) to represent the Q-function that exploit the node correlations of the underlying contact network. Second, to avoid solving a combinatorial optimization problem in each time period, we decompose the node set selection as a sub-sequence of decisions, and further design a two-level RL framework that solves the problem in a hierarchical way. Finally, to speed-up the slow convergence of RL which arises from reward sparseness, we incorporate ideas from curriculum learning into our hierarchical RL approach. We evaluate our RL algorithm on several real-world networks.
Strengthening the Training of Convolutional Neural Networks By Using Walsh Matrix
Mar 31, 2021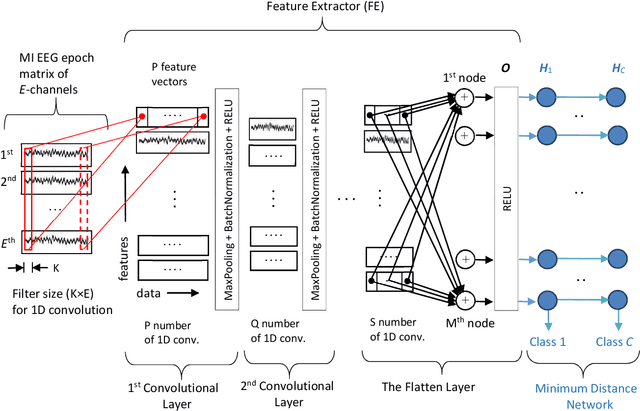
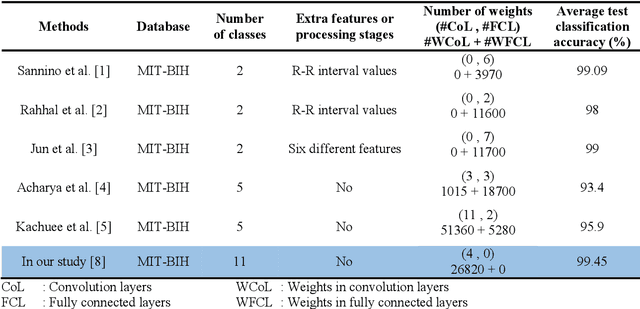

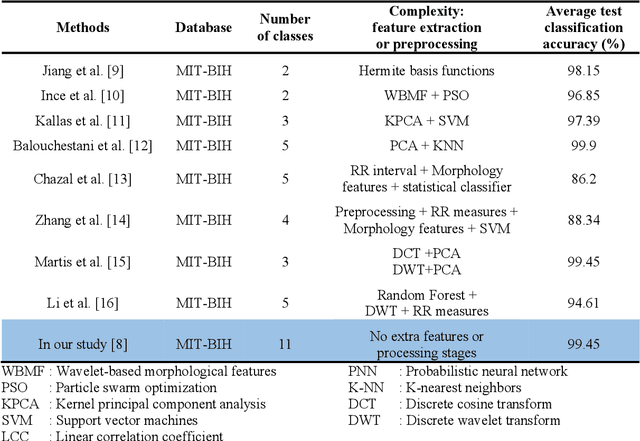
DNN structures are continuously developing and achieving high performances in classification problems. Also, it is observed that success rates obtained with DNNs are higher than those obtained with traditional neural networks. In addition, one of the advantages of DNNs is that there is no need to spend an extra effort to determine the features; the CNN automatically extracts the features from the dataset during the training. Besides their benefits, the DNNs have the following three major drawbacks among the others: (i) Researchers have struggled with over-fitting and under-fitting issues in the training of DNNs, (ii) determination of even a coarse structure for the DNN may take days, and (iii) most of the time, the proposed network structure is too large to be too bulky to be used in real time applications. We have modified the training and structure of DNN to increase the classification performance, to decrease the number of nodes in the structure, and to be used with less number of hyper parameters. A minimum distance network (MDN) following the last layer of the convolutional neural network (CNN) is used as the classifier instead of a fully connected neural network (FCNN). In order to strengthen the training of the CNN, we suggest employing Walsh function. We tested the performances of the proposed DNN (named as DivFE) on the classification of ECG, EEG, heart sound, detection pneumonia in X-ray chest images, detection of BGA solder defects, and patterns of benchmark datasets (MNIST, IRIS, CIFAR10 and CIFAR20). In different areas, it has been observed that a higher classification performance was obtained by using the DivFE with less number of nodes.
Impact of Sound Duration and Inactive Frames on Sound Event Detection Performance
Feb 03, 2021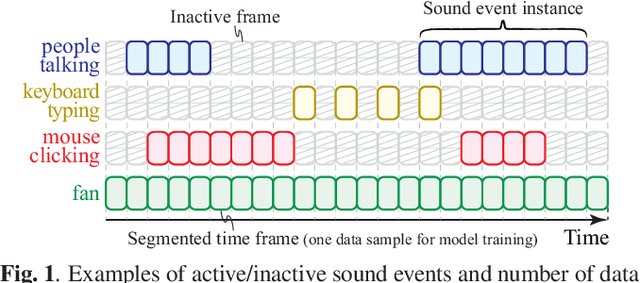
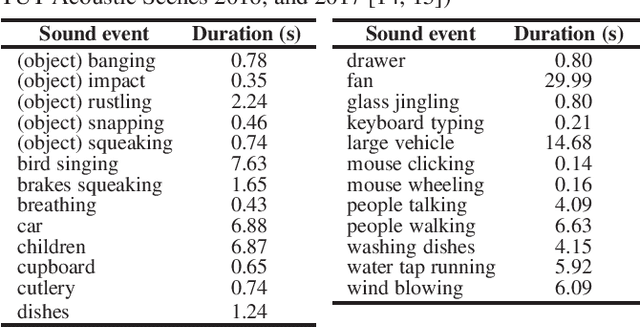
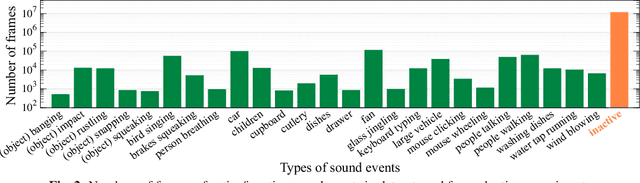
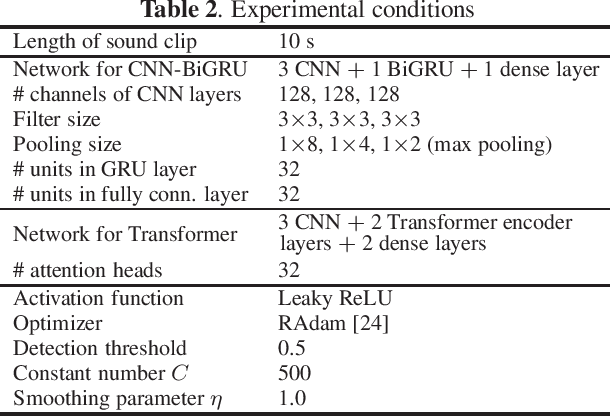
In many methods of sound event detection (SED), a segmented time frame is regarded as one data sample to model training. The durations of sound events greatly depend on the sound event class, e.g., the sound event "fan" has a long duration, whereas the sound event "mouse clicking" is instantaneous. Thus, the difference in the duration between sound event classes results in a serious data imbalance in SED. Moreover, most sound events tend to occur occasionally; therefore, there are many more inactive time frames of sound events than active frames. This also causes a severe data imbalance between active and inactive frames. In this paper, we investigate the impact of sound duration and inactive frames on SED performance by introducing four loss functions, such as simple reweighting loss, inverse frequency loss, asymmetric focal loss, and focal batch Tversky loss. Then, we provide insights into how we tackle this imbalance problem.
Finite-Horizon, Energy-Optimal Trajectories in Unsteady Flows
Mar 18, 2021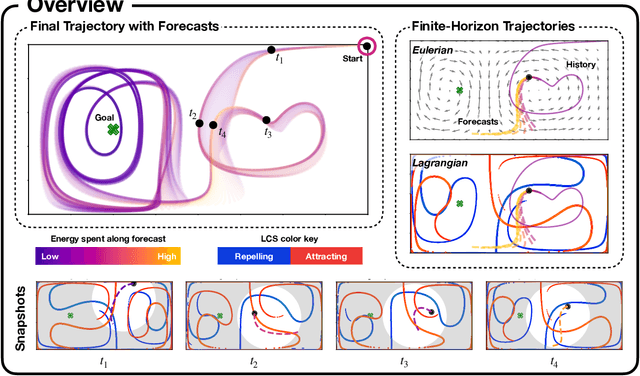
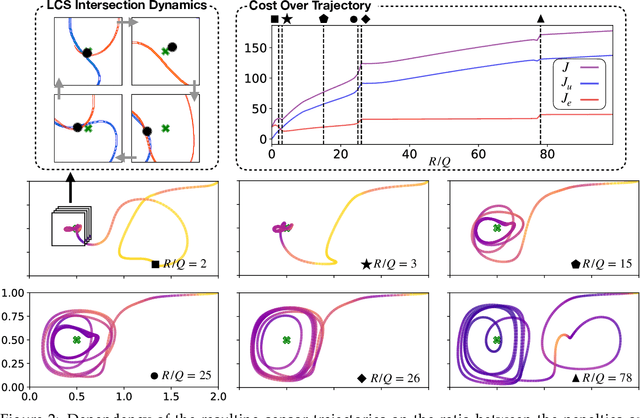
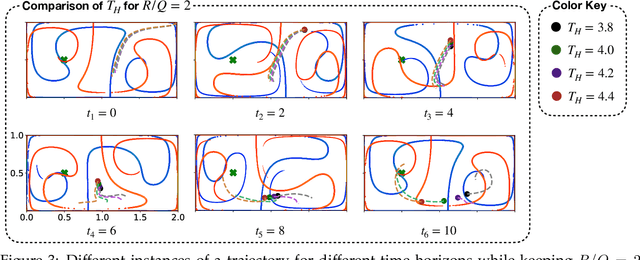
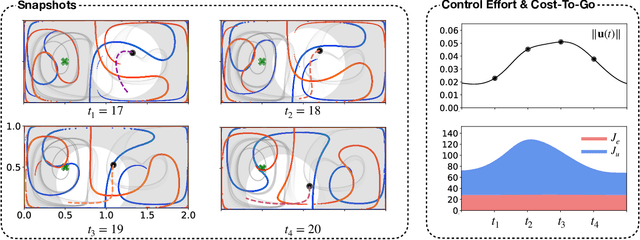
Intelligent mobile sensors, such as uninhabited aerial or underwater vehicles, are becoming prevalent in environmental sensing and monitoring applications. These active sensing platforms operate in unsteady fluid flows, including windy urban environments, hurricanes, and ocean currents. Often constrained in their actuation capabilities, the dynamics of these mobile sensors depend strongly on the background flow, making their deployment and control particularly challenging. Therefore, efficient trajectory planning with partial knowledge about the background flow is essential for teams of mobile sensors to adaptively sense and monitor their environments. In this work, we investigate the use of finite-horizon model predictive control (MPC) for the energy-efficient trajectory planning of an active mobile sensor in an unsteady fluid flow field. We uncover connections between the finite-time optimal trajectories and finite-time Lyapunov exponents (FTLE) of the background flow, confirming that energy-efficient trajectories exploit invariant coherent structures in the flow. We demonstrate our findings on the unsteady double gyre vector field, which is a canonical model for chaotic mixing in the ocean. We present an exhaustive search through critical MPC parameters including the prediction horizon, maximum sensor actuation, and relative penalty on the accumulated state error and actuation effort. We find that even relatively short prediction horizons can often yield nearly energy-optimal trajectories. These results are promising for the adaptive planning of energy-efficient trajectories for swarms of mobile sensors in distributed sensing and monitoring.
Probabilistic Gradient Boosting Machines for Large-Scale Probabilistic Regression
Jun 06, 2021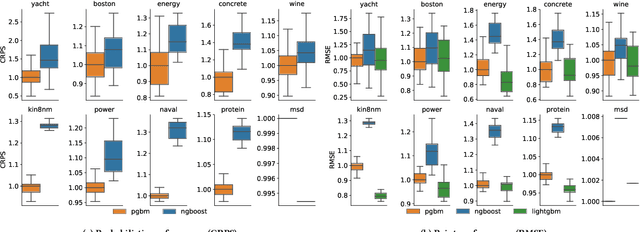
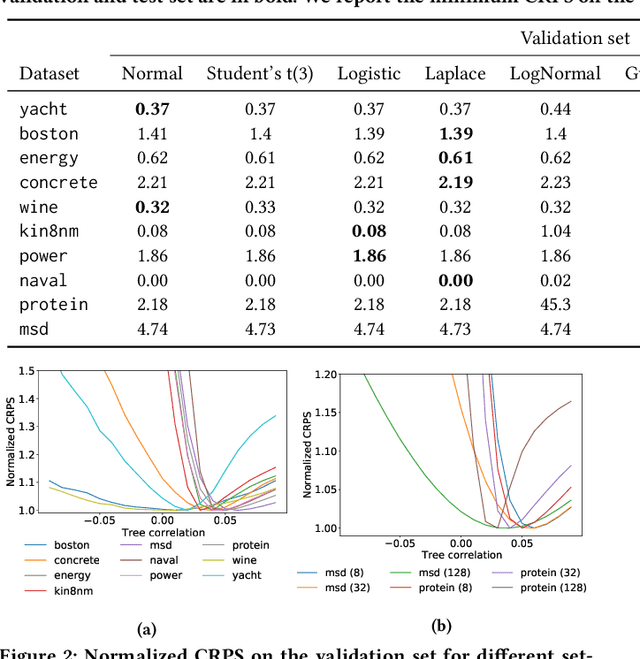
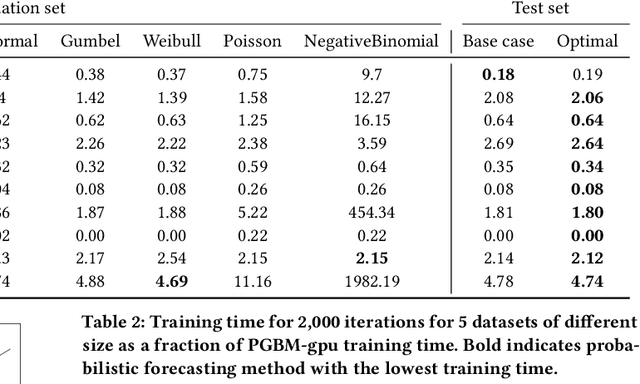
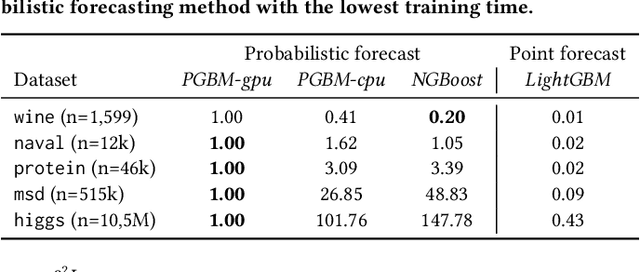
Gradient Boosting Machines (GBM) are hugely popular for solving tabular data problems. However, practitioners are not only interested in point predictions, but also in probabilistic predictions in order to quantify the uncertainty of the predictions. Creating such probabilistic predictions is difficult with existing GBM-based solutions: they either require training multiple models or they become too computationally expensive to be useful for large-scale settings. We propose Probabilistic Gradient Boosting Machines (PGBM), a method to create probabilistic predictions with a single ensemble of decision trees in a computationally efficient manner. PGBM approximates the leaf weights in a decision tree as a random variable, and approximates the mean and variance of each sample in a dataset via stochastic tree ensemble update equations. These learned moments allow us to subsequently sample from a specified distribution after training. We empirically demonstrate the advantages of PGBM compared to existing state-of-the-art methods: (i) PGBM enables probabilistic estimates without compromising on point performance in a single model, (ii) PGBM learns probabilistic estimates via a single model only (and without requiring multi-parameter boosting), and thereby offers a speedup of up to several orders of magnitude over existing state-of-the-art methods on large datasets, and (iii) PGBM achieves accurate probabilistic estimates in tasks with complex differentiable loss functions, such as hierarchical time series problems, where we observed up to 10% improvement in point forecasting performance and up to 300% improvement in probabilistic forecasting performance.