 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Deep Canonical Correlation Alignment for Sensor Signals
Jun 07, 2021
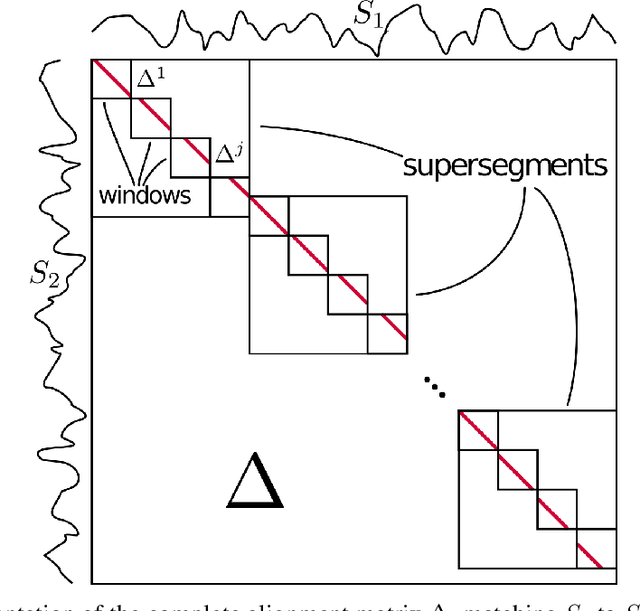

Sensor technology is becoming increasingly prevalent across a multitude of fields and industries. As a result, simultaneous recordings of multiple inter-correlated signals is becoming increasingly common. With this, more problems of a practical nature emerge due to sensor clock-drift, offsets, and other complications. Processing of multiple sensor data is often dependent on the data being properly aligned in the temporal dimension. The alignment process is a necessary step before the data can be evaluated properly but it is a time consuming process, often involving significant manual labor and expertise. Regularly used methods to align sensor signals have trouble addressing real-world issues such as morphological dissimilarities, excessive noise, or very long, raw sensor signals. In this work, we present Deep Canonical Correlation Sensor Alignment (DCCA), a method that is specifically tailored to address these problems. It exploits common properties specific to misalignments produced by sensor circuitry, such as clock-drift and offsets. On a selection of artificial and real datasets we demonstrate the performance of DCCA under a variety of conditions.
Energy Efficient Reconfigurable Intelligent Surface Enabled Mobile Edge Computing Networks with NOMA
Apr 30, 2021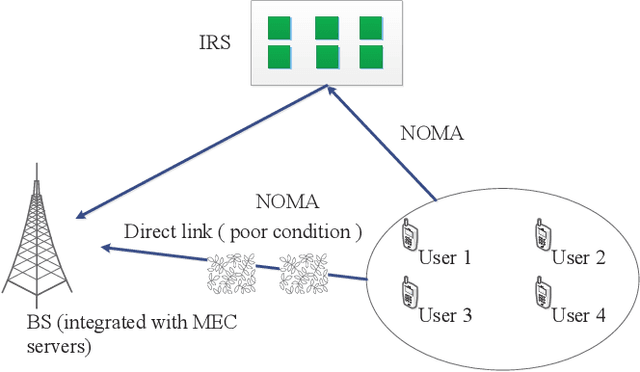
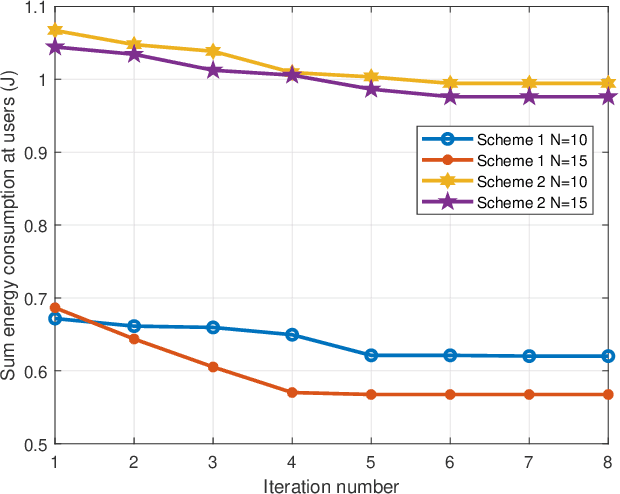
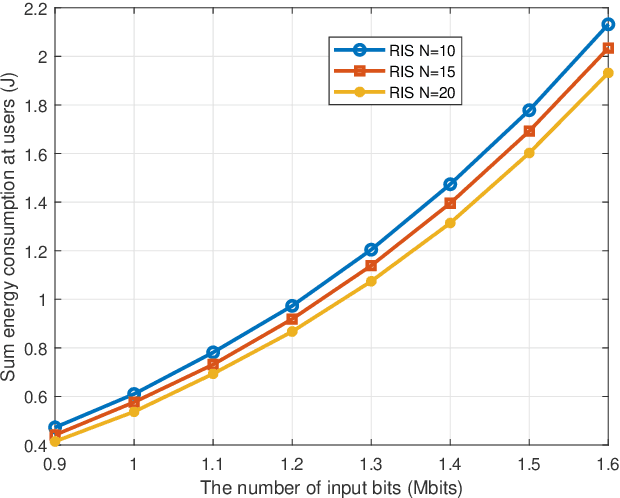
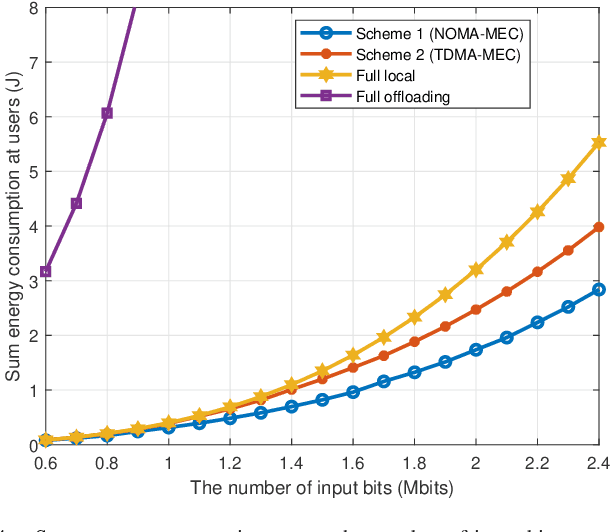
Reconfigurable intelligent surface (RIS) has emerged as a promising technology for achieving high spectrum and energy efficiency in future wireless communication networks. In this paper, we investigate an RIS-aided single-cell multi-user mobile edge computing (MEC) system where an RIS is deployed to support the communication between a base station (BS) equipped with MEC servers and multiple single-antenna users. To utilize the scarce frequency resource efficiently, we assume that users communicate with BS based on a non-orthogonal multiple access (NOMA) protocol. Each user has a computation task which can be computed locally or partially/fully offloaded to the BS. We aim to minimize the sum energy consumption of all users by jointly optimizing the passive phase shifters, the size of transmission data, transmission rate, power control, transmission time and the decoding order. Since the resulting problem is non-convex, we use the block coordinate descent method to alternately optimize two separated subproblems. More specifically, we use the dual method to tackle a subproblem with given phase shift and obtain the closed-form solution; and then we utilize penalty method to solve another subproblem for given power control. Moreover, in order to demonstrate the effectiveness of our proposed algorithm, we propose three benchmark schemes: the time-division multiple access (TDMA)-MEC scheme, the full local computing scheme and the full offloading scheme. We use an alternating 1-D search method and the dual method that can solve the TDMA-based transmission problem well. Numerical results demonstrate that the proposed scheme can increase the energy efficiency and achieve significant performance gains over the three benchmark schemes.
Initializing LSTM internal states via manifold learning
May 12, 2021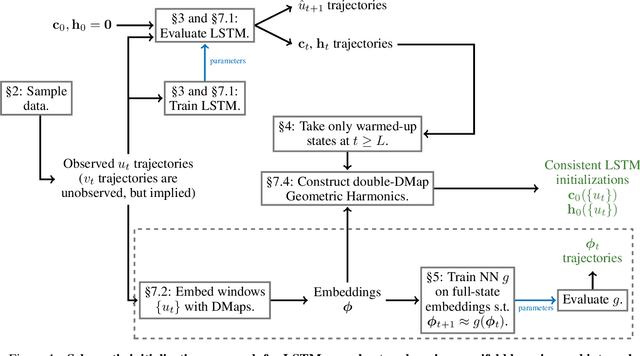
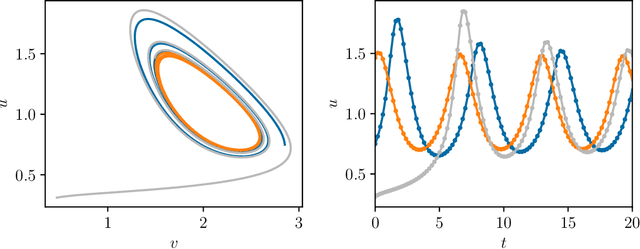
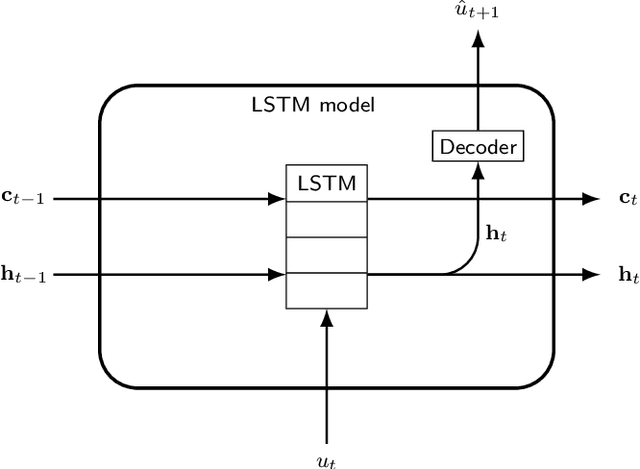
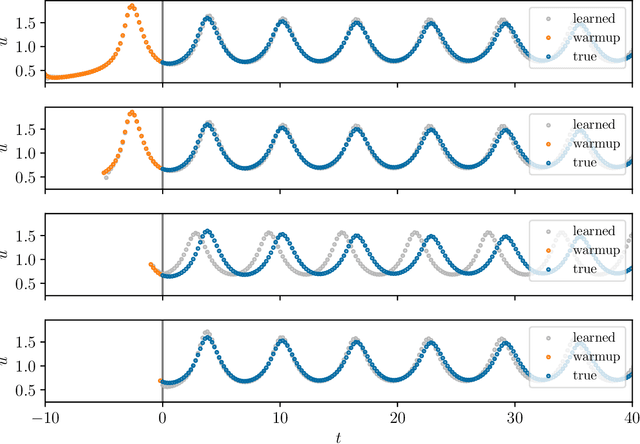
We present an approach, based on learning an intrinsic data manifold, for the initialization of the internal state values of LSTM recurrent neural networks, ensuring consistency with the initial observed input data. Exploiting the generalized synchronization concept, we argue that the converged, "mature" internal states constitute a function on this learned manifold. The dimension of this manifold then dictates the length of observed input time series data required for consistent initialization. We illustrate our approach through a partially observed chemical model system, where initializing the internal LSTM states in this fashion yields visibly improved performance. Finally, we show that learning this data manifold enables the transformation of partially observed dynamics into fully observed ones, facilitating alternative identification paths for nonlinear dynamical systems.
Continual Learning for Real-World Autonomous Systems: Algorithms, Challenges and Frameworks
May 26, 2021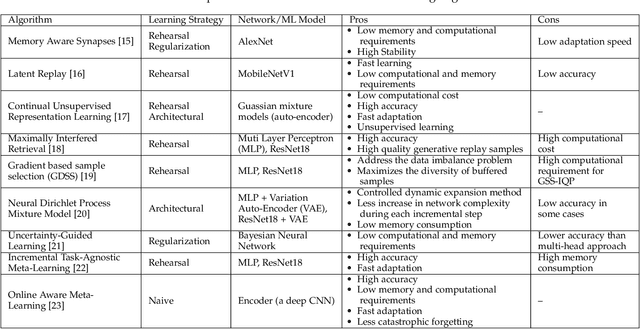
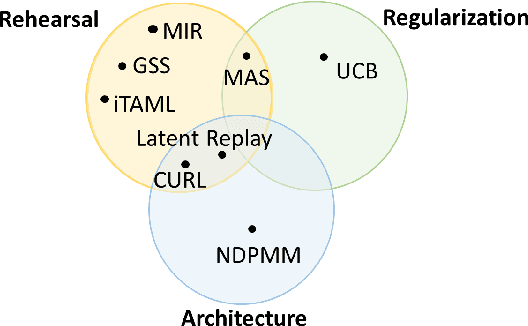
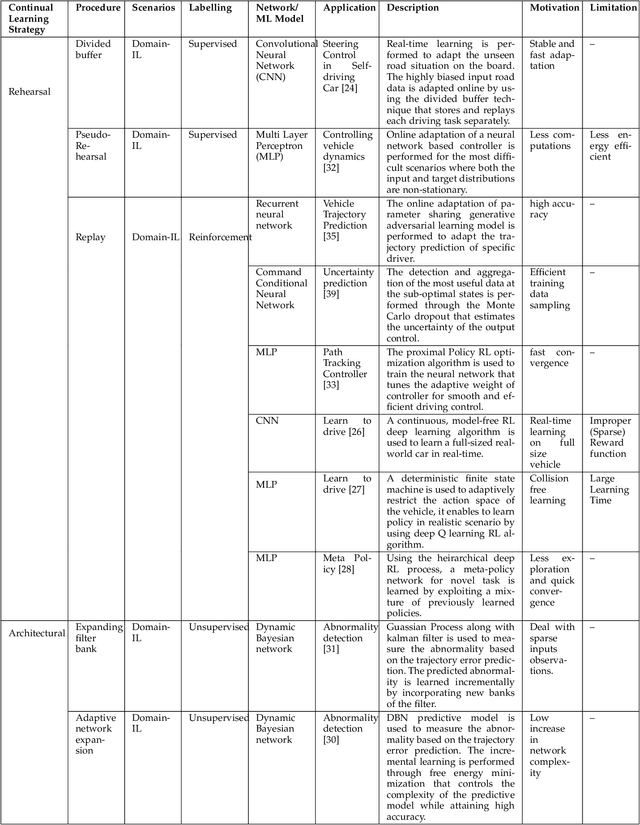
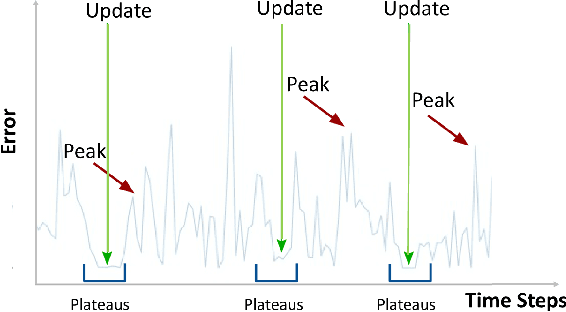
Continual learning is essential for all real-world applications, as frozen pre-trained models cannot effectively deal with non-stationary data distributions. The purpose of this study is to review the state-of-the-art methods that allow continuous learning of computational models over time. We primarily focus on the learning algorithms that perform continuous learning in an online fashion from considerably large (or infinite) sequential data and require substantially low computational and memory resources. We critically analyze the key challenges associated with continual learning for autonomous real-world systems and compare current methods in terms of computations, memory, and network/model complexity. We also briefly describe the implementations of continuous learning algorithms under three main autonomous systems, i.e., self-driving vehicles, unmanned aerial vehicles, and robotics. The learning methods of these autonomous systems and their strengths and limitations are extensively explored in this article.
Continuum: Simple Management of Complex Continual Learning Scenarios
Feb 11, 2021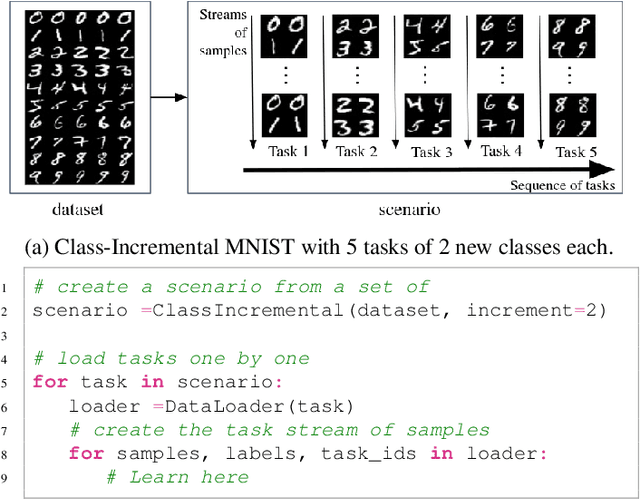
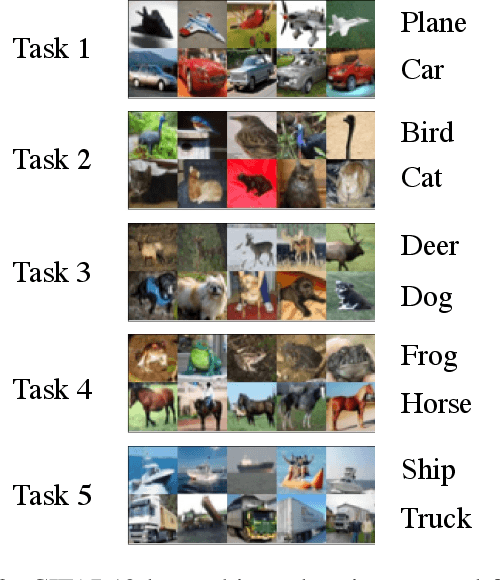
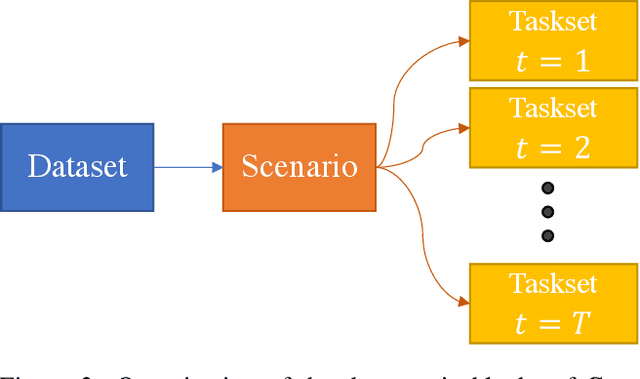
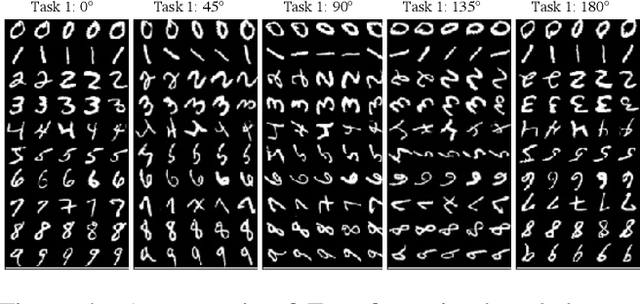
Continual learning is a machine learning sub-field specialized in settings with non-iid data. Hence, the training data distribution is not static and drifts through time. Those drifts might cause interferences in the trained model and knowledge learned on previous states of the data distribution might be forgotten. Continual learning's challenge is to create algorithms able to learn an ever-growing amount of knowledge while dealing with data distribution drifts. One implementation difficulty in these field is to create data loaders that simulate non-iid scenarios. Indeed, data loaders are a key component for continual algorithms. They should be carefully designed and reproducible. Small errors in data loaders have a critical impact on algorithm results, e.g. with bad preprocessing, wrong order of data or bad test set. Continuum is a simple and efficient framework with numerous data loaders that avoid researcher to spend time on designing data loader and eliminate time-consuming errors. Using our proposed framework, it is possible to directly focus on the model design by using the multiple scenarios and evaluation metrics implemented. Furthermore the framework is easily extendable to add novel settings for specific needs.
Sequential Recommendation with Graph Neural Networks
Jun 27, 2021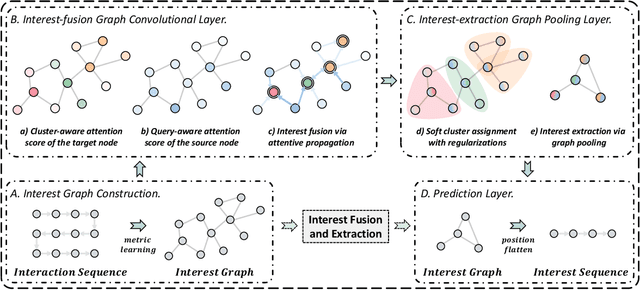
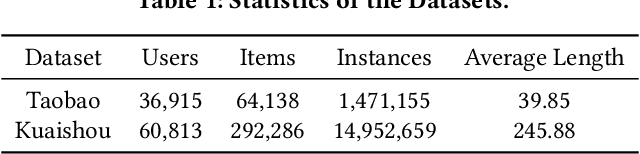
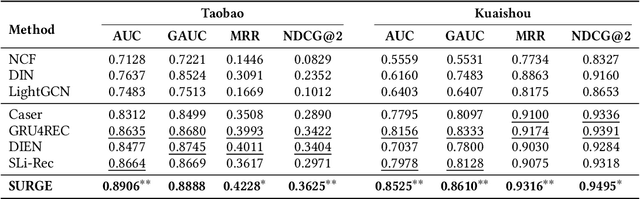
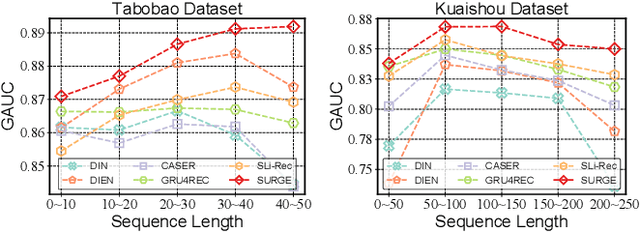
Sequential recommendation aims to leverage users' historical behaviors to predict their next interaction. Existing works have not yet addressed two main challenges in sequential recommendation. First, user behaviors in their rich historical sequences are often implicit and noisy preference signals, they cannot sufficiently reflect users' actual preferences. In addition, users' dynamic preferences often change rapidly over time, and hence it is difficult to capture user patterns in their historical sequences. In this work, we propose a graph neural network model called SURGE (short for SeqUential Recommendation with Graph neural nEtworks) to address these two issues. Specifically, SURGE integrates different types of preferences in long-term user behaviors into clusters in the graph by re-constructing loose item sequences into tight item-item interest graphs based on metric learning. This helps explicitly distinguish users' core interests, by forming dense clusters in the interest graph. Then, we perform cluster-aware and query-aware graph convolutional propagation and graph pooling on the constructed graph. It dynamically fuses and extracts users' current activated core interests from noisy user behavior sequences. We conduct extensive experiments on both public and proprietary industrial datasets. Experimental results demonstrate significant performance gains of our proposed method compared to state-of-the-art methods. Further studies on sequence length confirm that our method can model long behavioral sequences effectively and efficiently.
PCA Event-Based Optical Flow for Visual Odometry
May 17, 2021
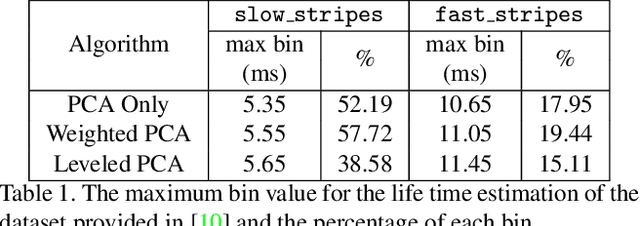
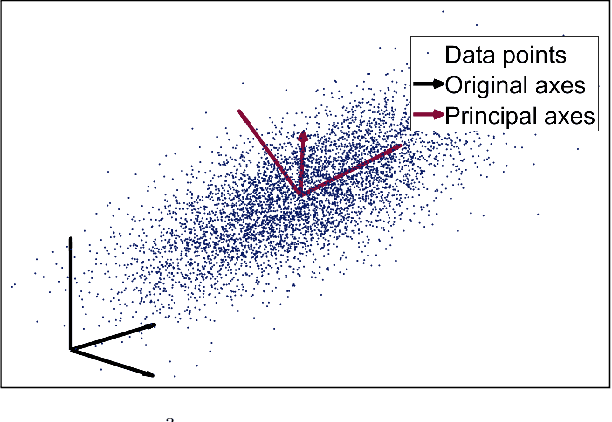
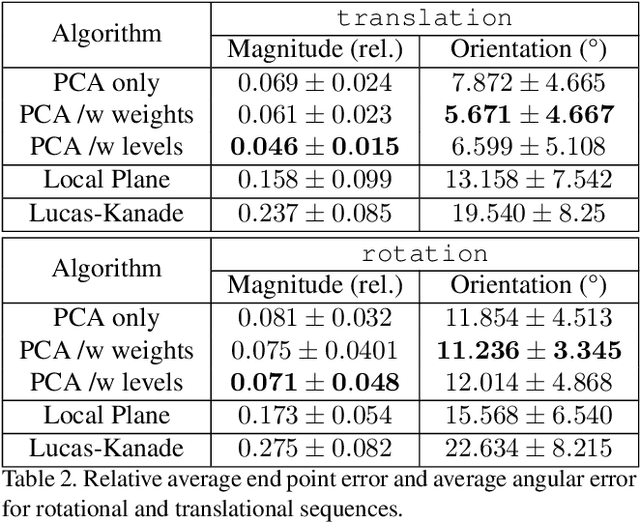
With the advent of neuromorphic vision sensors such as event-based cameras, a paradigm shift is required for most computer vision algorithms. Among these algorithms, optical flow estimation is a prime candidate for this process considering that it is linked to a neuromorphic vision approach. Usage of optical flow is widespread in robotics applications due to its richness and accuracy. We present a Principal Component Analysis (PCA) approach to the problem of event-based optical flow estimation. In this approach, we examine different regularization methods which efficiently enhance the estimation of the optical flow. We show that the best variant of our proposed method, dedicated to the real-time context of visual odometry, is about two times faster compared to state-of-the-art implementations while significantly improves optical flow accuracy.
Perceived Safety in Physical Human Robot Interaction -- A Survey
May 30, 2021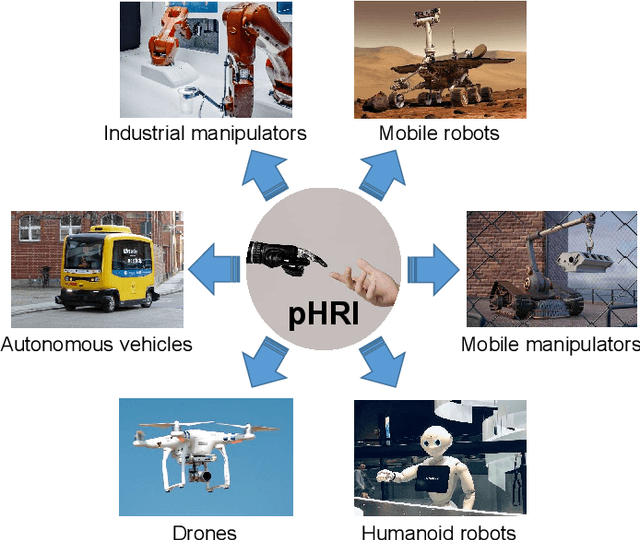
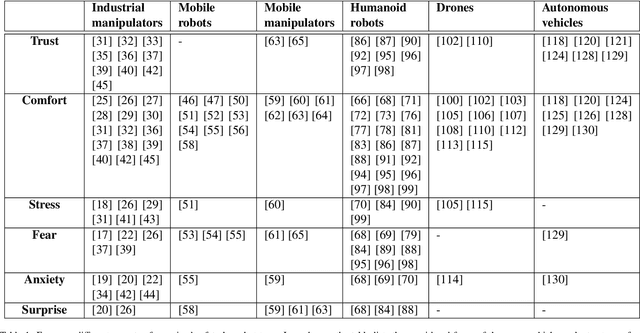
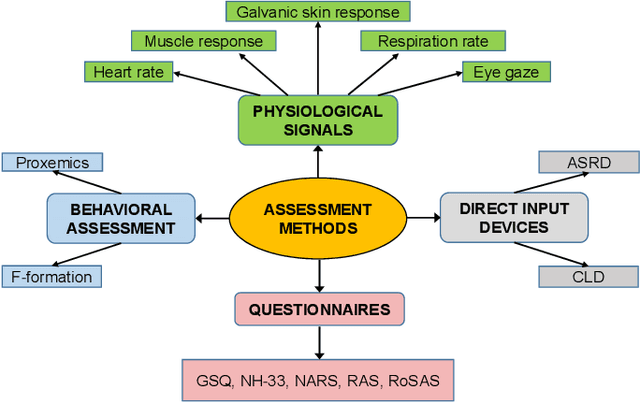
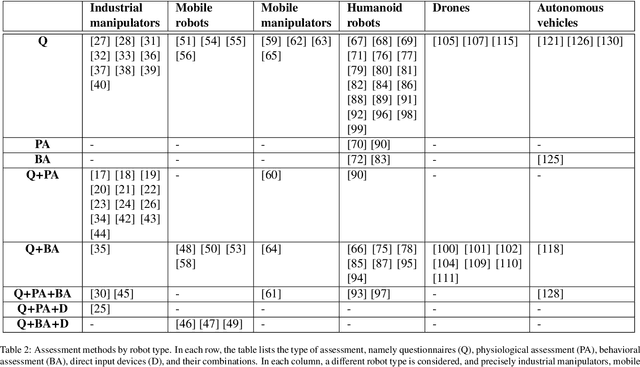
This review paper focuses on different aspects of perceived safety for a number of autonomous physical systems. This is a major aspect of robotics research, as more and more applications allow human and autonomous systems to share their space, with crucial implications both on safety and on its perception. The alternative terms used to express related concepts (e.g., psychological safety, trust, comfort, stress, fear, and anxiety) are listed and explained. Then, the available methods to assess perceived safety (i.e., questionnaires, physiological measurements, behavioral assessment, and direct input devices) are described. Six categories of autonomous systems are considered (industrial manipulators, mobile robots, mobile manipulators, humanoid robots, drones, and autonomous vehicles), providing an overview of the main themes related to perceived safety in the specific domain, a description of selected works, and an analysis of how motion and characteristics of the system influence the perception of safety. The survey also discusses experimental duration and location of the reviewed papers as well as identified trends over time.
Real-Time 3D Profiling with RGB-D Mapping in Pipelines Using Stereo Camera Vision and Structured IR Laser Ring
Jul 29, 2019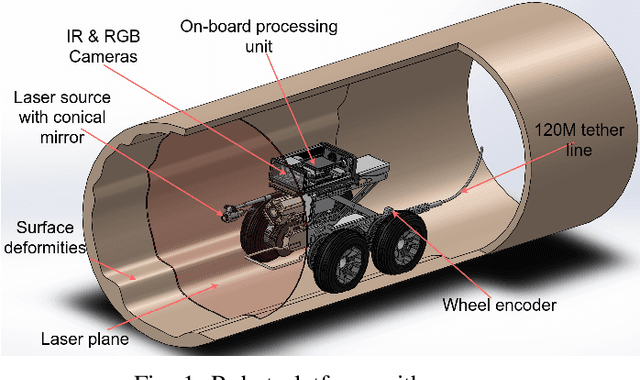
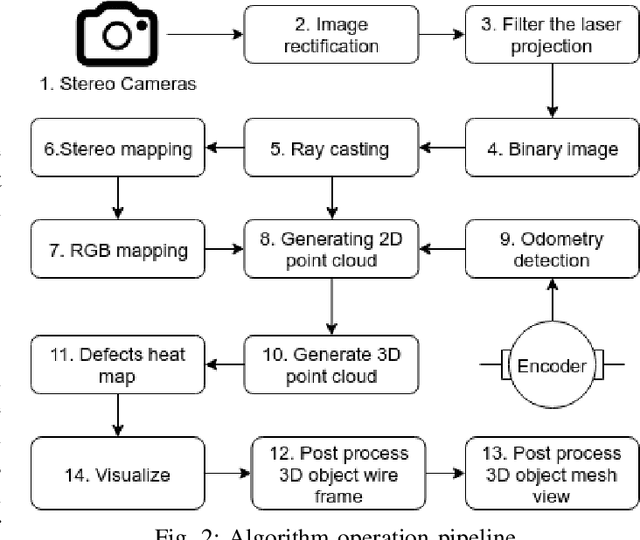
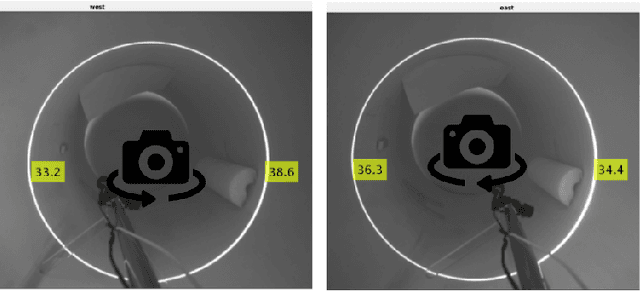
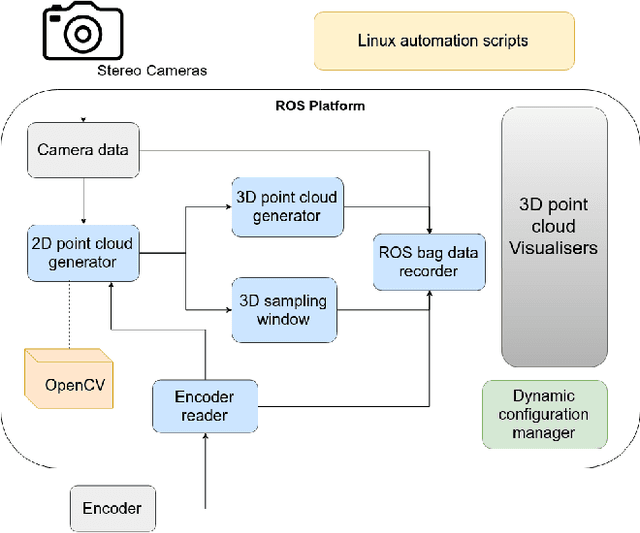
This paper is focused on delivering a solution that can scan and reconstruct the 3D profile of a pipeline in real-time using a crawler robot. A structured infrared (IR) laser ring projector and a stereo camera system are used to generate the 3D profile of the pipe as the robot moves inside the pipe. The proposed stereo system does not require field calibrations and it is not affected by the lateral movement of the robot, hence capable of producing an accurate 3D map. The wavelength of the IR light source is chosen to be non overlapping with the visible spectrum of the color camera. Hence RGB color values of the depth can be obtained by projecting the 3D map into the color image frame. The proposed system is implemented in Robotic Operating System (ROS) producing real-time RGB-D maps with defects. The defect map exploit differences in ovality enabling real-time identification of structural defects such as surface corrosion in pipe infrastructure. The lab experiments showed the proposed laser profiling system can detect ovality changes of the pipe with millimeter level of accuracy and resolution.
An Empirical Survey of Data Augmentation for Limited Data Learning in NLP
Jun 14, 2021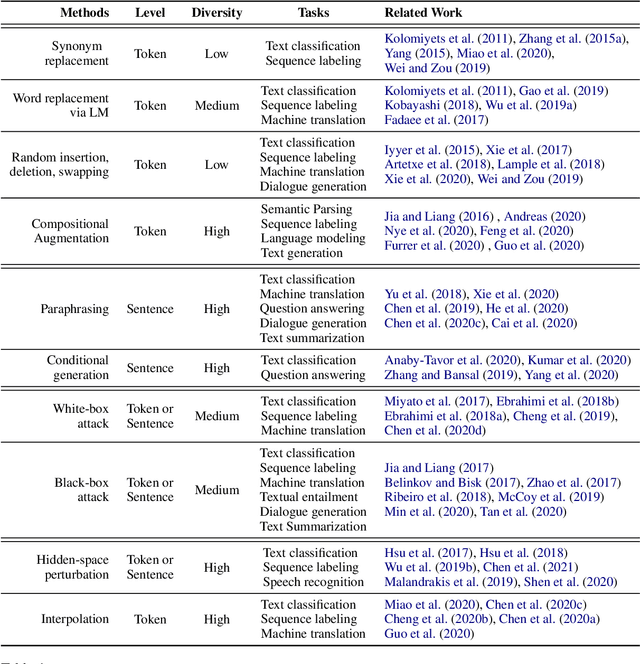
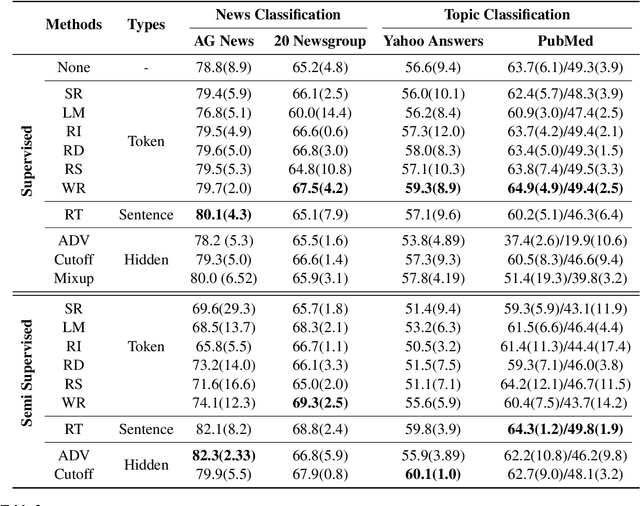
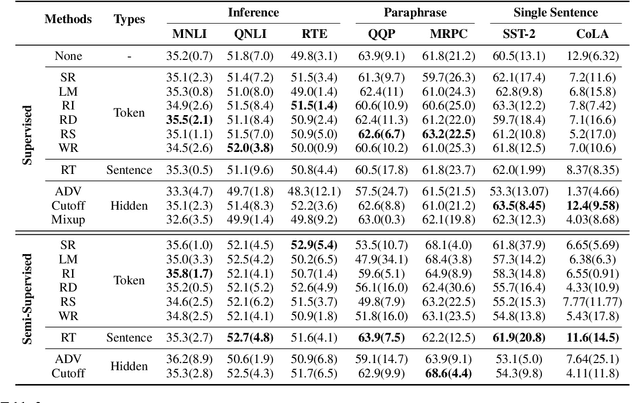
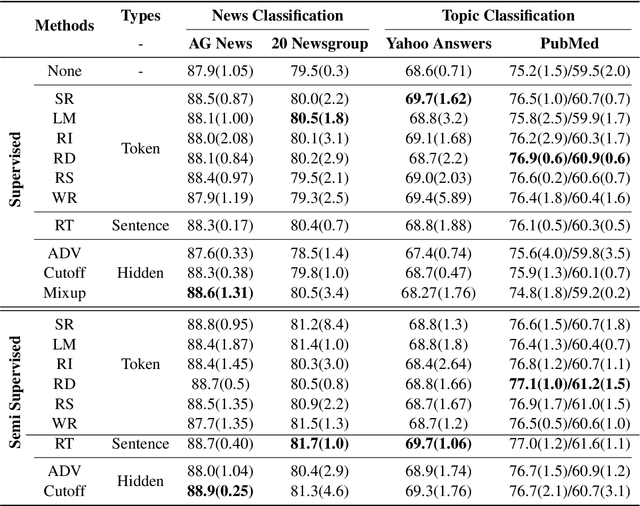
NLP has achieved great progress in the past decade through the use of neural models and large labeled datasets. The dependence on abundant data prevents NLP models from being applied to low-resource settings or novel tasks where significant time, money, or expertise is required to label massive amounts of textual data. Recently, data augmentation methods have been explored as a means of improving data efficiency in NLP. To date, there has been no systematic empirical overview of data augmentation for NLP in the limited labeled data setting, making it difficult to understand which methods work in which settings. In this paper, we provide an empirical survey of recent progress on data augmentation for NLP in the limited labeled data setting, summarizing the landscape of methods (including token-level augmentations, sentence-level augmentations, adversarial augmentations, and hidden-space augmentations) and carrying out experiments on 11 datasets covering topics/news classification, inference tasks, paraphrasing tasks, and single-sentence tasks. Based on the results, we draw several conclusions to help practitioners choose appropriate augmentations in different settings and discuss the current challenges and future directions for limited data learning in NLP.