 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
$k$-Neighbor Based Curriculum Sampling for Sequence Prediction
Jan 22, 2021
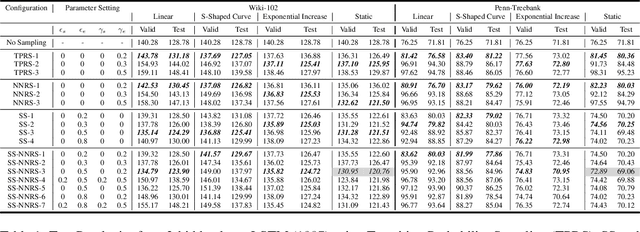
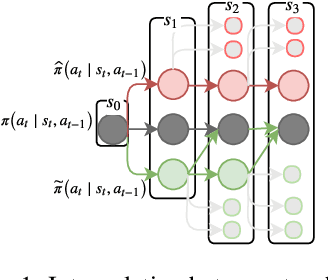
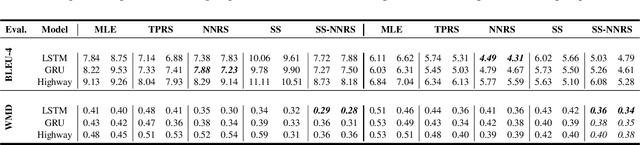
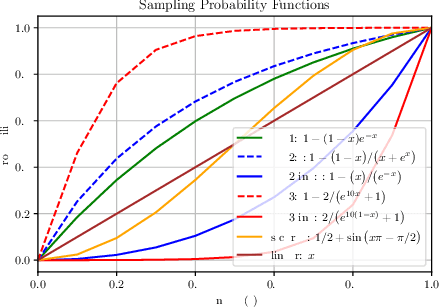
Multi-step ahead prediction in language models is challenging due to the discrepancy between training and test time processes. At test time, a sequence predictor is required to make predictions given past predictions as the input, instead of the past targets that are provided during training. This difference, known as exposure bias, can lead to the compounding of errors along a generated sequence at test time. To improve generalization in neural language models and address compounding errors, we propose \textit{Nearest-Neighbor Replacement Sampling} -- a curriculum learning-based method that gradually changes an initially deterministic teacher policy to a stochastic policy. A token at a given time-step is replaced with a sampled nearest neighbor of the past target with a truncated probability proportional to the cosine similarity between the original word and its top $k$ most similar words. This allows the learner to explore alternatives when the current policy provided by the teacher is sub-optimal or difficult to learn from. The proposed method is straightforward, online and requires little additional memory requirements. We report our findings on two language modelling benchmarks and find that the proposed method further improves performance when used in conjunction with scheduled sampling.
Automated Onychomycosis Detection Using Deep Neural Networks
Jun 30, 2021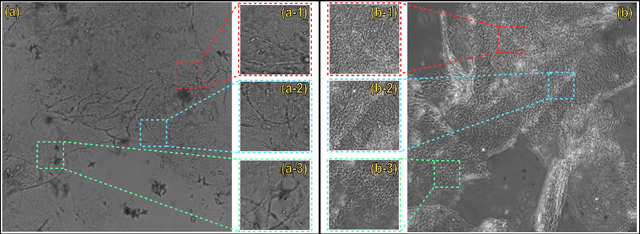
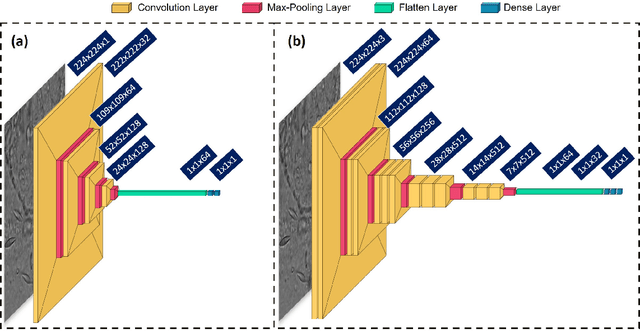
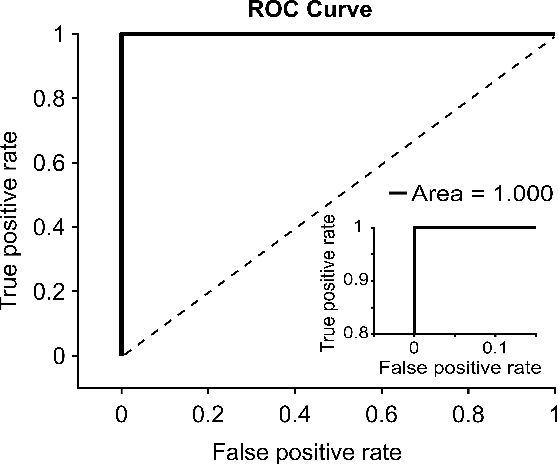
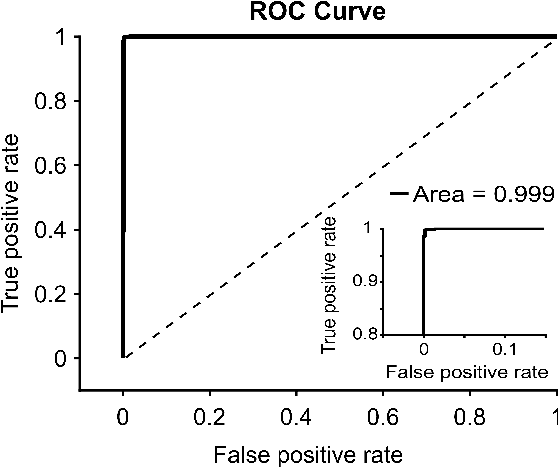
Clinical dermatology, still relies heavily on manual introspection of fungi within a Potassium Hydroxide (KOH) solution using a brightfield microscope. However, this method takes a long time, is based on the experience of the clinician, and has a low accuracy. With the increase of neural network applications in the field of clinical microscopy it is now possible to automate such manual processes increasing both efficiency and accuracy. This study presents a deep neural network structure that enables the rapid solutions for these problems and can perform automatic fungi detection in grayscale images without colorants. Microscopic images of 81 fungi and 235 ceratine were collected. Then, smaller patches were extracted containing 2062 fungi and 2142 ceratine. In order to detect fungus and ceratine, two models were created one of which was a custom neural network and the other was based on the VGG16 architecture. The developed custom model had 99.84% accuracy, and an area under the curve (AUC) value of 1.00, while the VGG16 model had 98.89% accuracy and an AUC value of 0.99. However, average accuracy and AUC value of clinicians is 72.8% and 0.87 respectively. This deep learning model allows the development of an automated system that can detect fungi within microscopic images.
Sleeper Agent: Scalable Hidden Trigger Backdoors for Neural Networks Trained from Scratch
Jun 16, 2021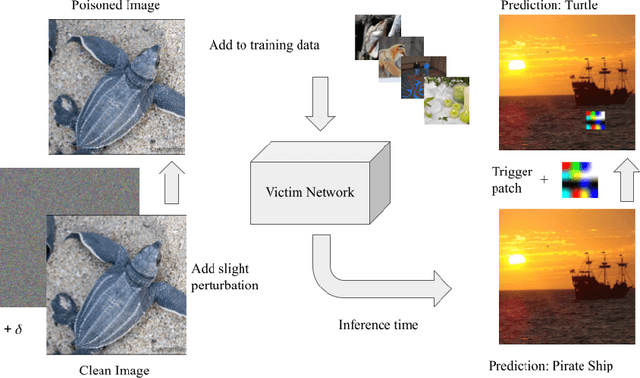
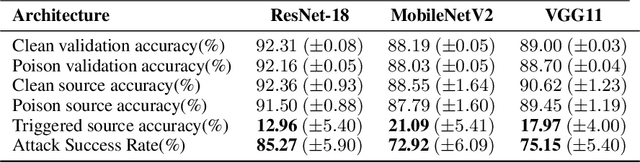
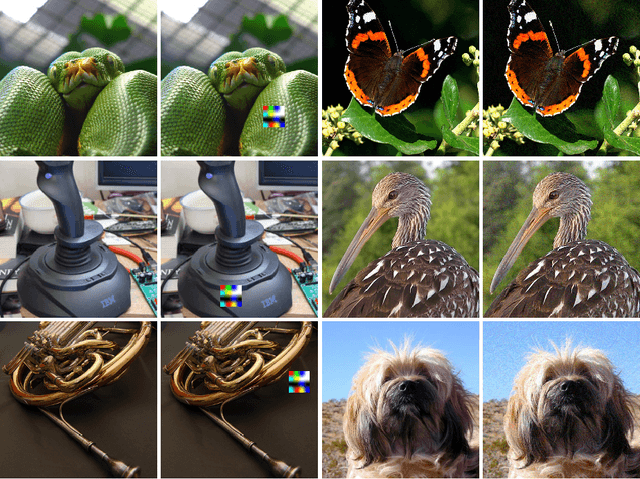
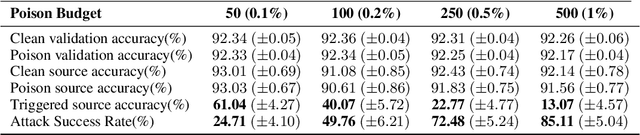
As the curation of data for machine learning becomes increasingly automated, dataset tampering is a mounting threat. Backdoor attackers tamper with training data to embed a vulnerability in models that are trained on that data. This vulnerability is then activated at inference time by placing a "trigger" into the model's input. Typical backdoor attacks insert the trigger directly into the training data, although the presence of such an attack may be visible upon inspection. In contrast, the Hidden Trigger Backdoor Attack achieves poisoning without placing a trigger into the training data at all. However, this hidden trigger attack is ineffective at poisoning neural networks trained from scratch. We develop a new hidden trigger attack, Sleeper Agent, which employs gradient matching, data selection, and target model re-training during the crafting process. Sleeper Agent is the first hidden trigger backdoor attack to be effective against neural networks trained from scratch. We demonstrate its effectiveness on ImageNet and in black-box settings. Our implementation code can be found at https://github.com/hsouri/Sleeper-Agent.
Nonlinear Time Series Modeling: A Unified Perspective, Algorithm, and Application
Dec 24, 2017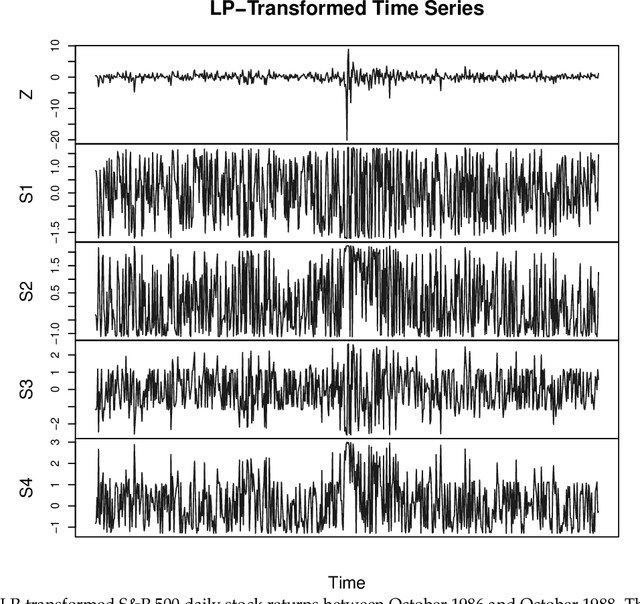
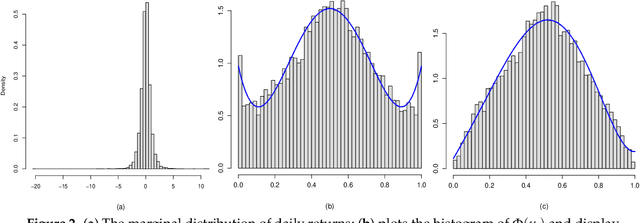
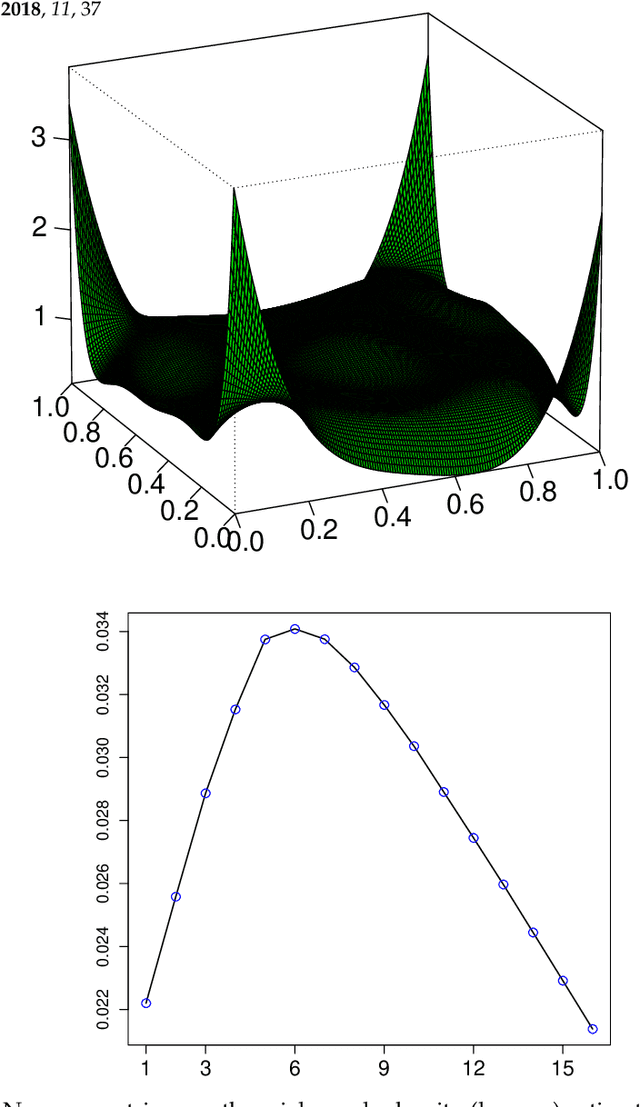
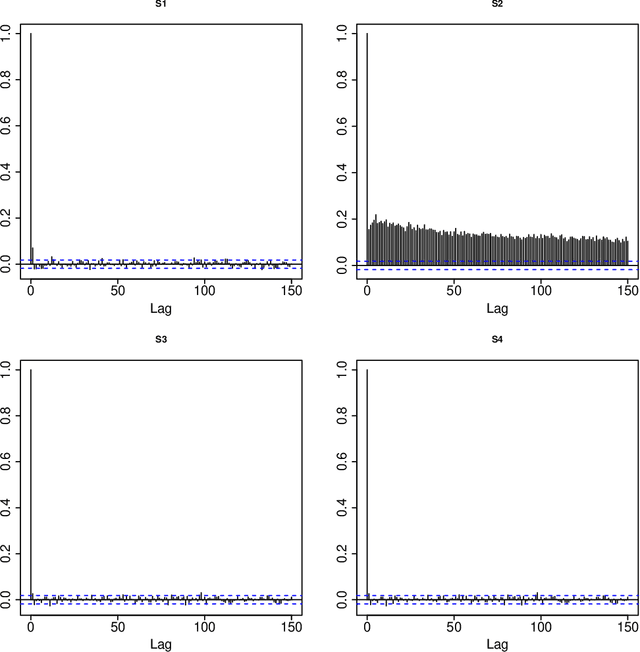
A new comprehensive approach to nonlinear time series analysis and modeling is developed in the present paper. We introduce novel data-specific mid-distribution based Legendre Polynomial (LP) like nonlinear transformations of the original time series Y(t) that enables us to adapt all the existing stationary linear Gaussian time series modeling strategy and made it applicable for non-Gaussian and nonlinear processes in a robust fashion. The emphasis of the present paper is on empirical time series modeling via the algorithm LPTime. We demonstrate the effectiveness of our theoretical framework using daily S&P 500 return data between Jan/2/1963 - Dec/31/2009. Our proposed LPTime algorithm systematically discovers all the `stylized facts' of the financial time series automatically all at once, which were previously noted by many researchers one at a time.
Transformer-based unsupervised patient representation learning based on medical claims for risk stratification and analysis
Jun 23, 2021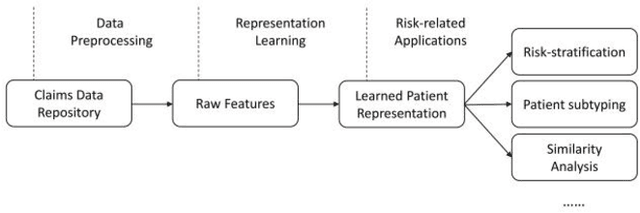
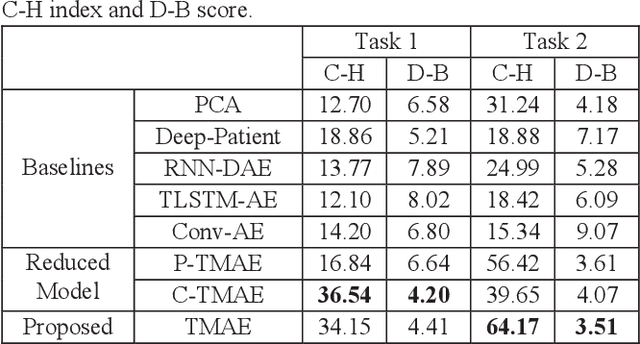
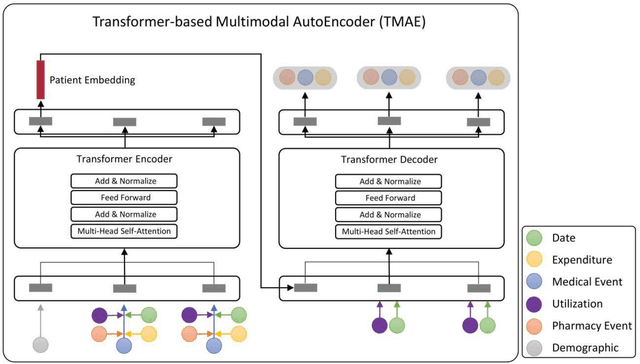
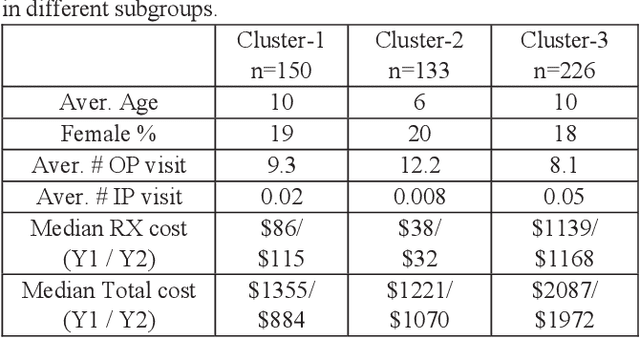
The claims data, containing medical codes, services information, and incurred expenditure, can be a good resource for estimating an individual's health condition and medical risk level. In this study, we developed Transformer-based Multimodal AutoEncoder (TMAE), an unsupervised learning framework that can learn efficient patient representation by encoding meaningful information from the claims data. TMAE is motivated by the practical needs in healthcare to stratify patients into different risk levels for improving care delivery and management. Compared to previous approaches, TMAE is able to 1) model inpatient, outpatient, and medication claims collectively, 2) handle irregular time intervals between medical events, 3) alleviate the sparsity issue of the rare medical codes, and 4) incorporate medical expenditure information. We trained TMAE using a real-world pediatric claims dataset containing more than 600,000 patients and compared its performance with various approaches in two clustering tasks. Experimental results demonstrate that TMAE has superior performance compared to all baselines. Multiple downstream applications are also conducted to illustrate the effectiveness of our framework. The promising results confirm that the TMAE framework is scalable to large claims data and is able to generate efficient patient embeddings for risk stratification and analysis.
Domain-independent User Simulation with Transformers for Task-oriented Dialogue Systems
Jun 16, 2021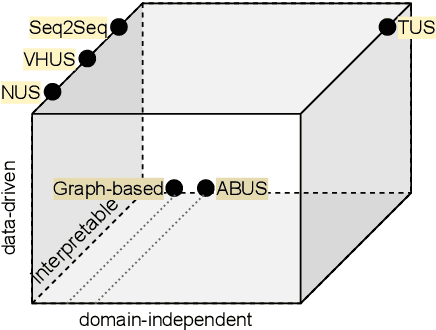
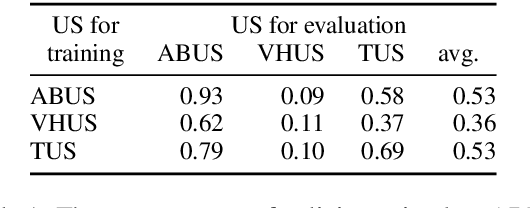
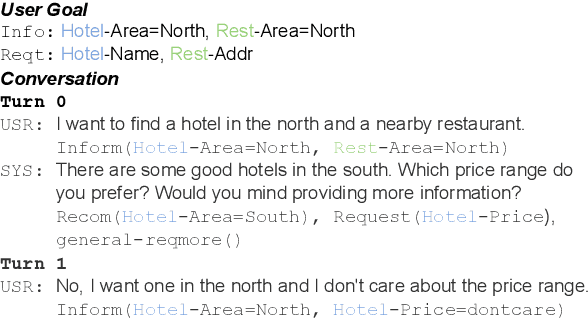
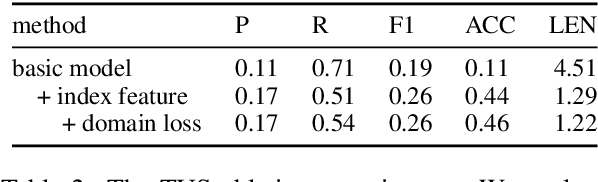
Dialogue policy optimisation via reinforcement learning requires a large number of training interactions, which makes learning with real users time consuming and expensive. Many set-ups therefore rely on a user simulator instead of humans. These user simulators have their own problems. While hand-coded, rule-based user simulators have been shown to be sufficient in small, simple domains, for complex domains the number of rules quickly becomes intractable. State-of-the-art data-driven user simulators, on the other hand, are still domain-dependent. This means that adaptation to each new domain requires redesigning and retraining. In this work, we propose a domain-independent transformer-based user simulator (TUS). The structure of our TUS is not tied to a specific domain, enabling domain generalisation and learning of cross-domain user behaviour from data. We compare TUS with the state of the art using automatic as well as human evaluations. TUS can compete with rule-based user simulators on pre-defined domains and is able to generalise to unseen domains in a zero-shot fashion.
Trajectory Servoing: Image-Based Trajectory Tracking Using SLAM
Feb 26, 2021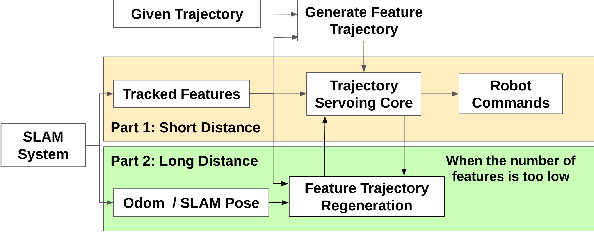
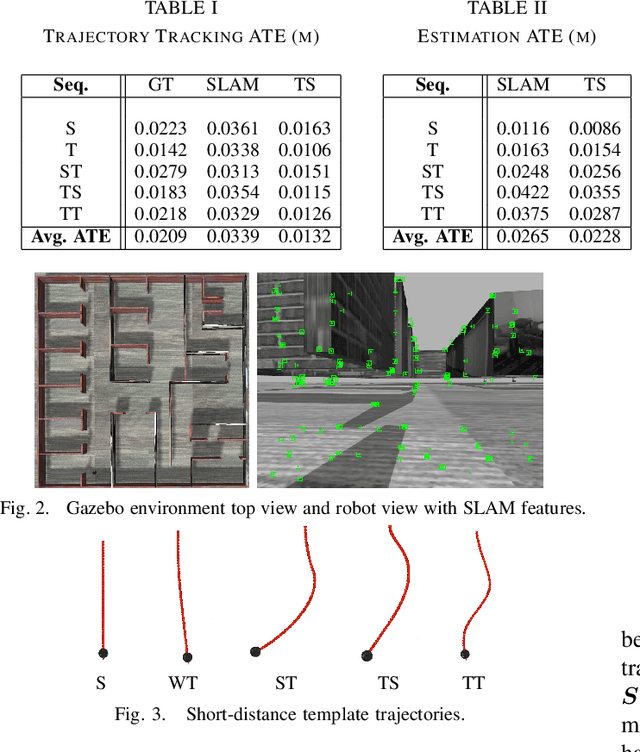
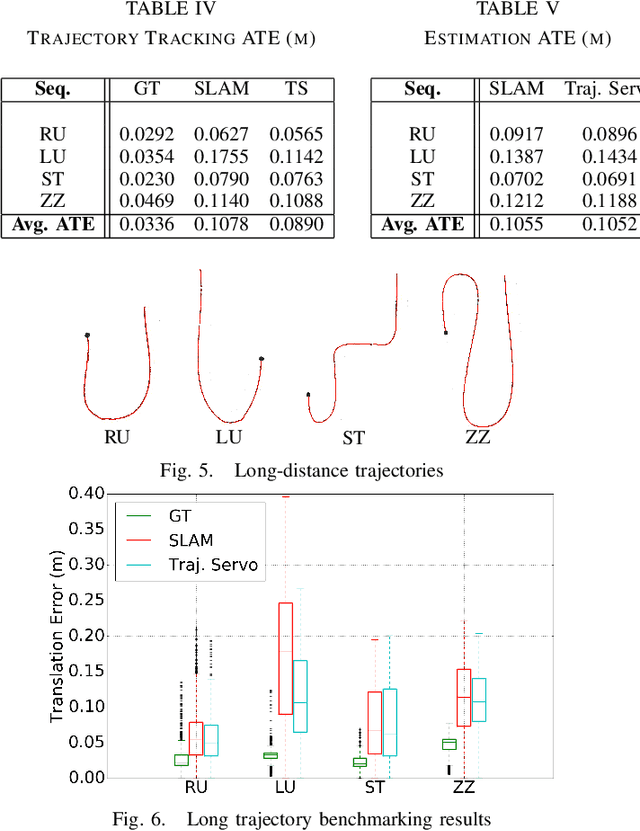
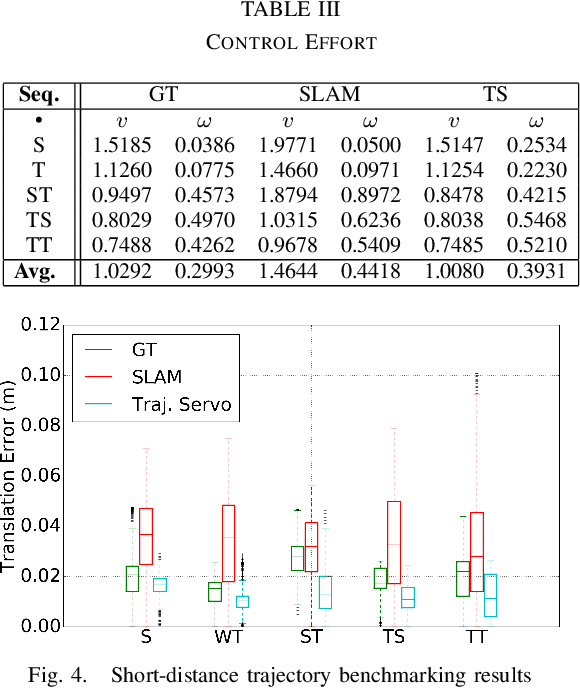
This paper describes an image based visual servoing (IBVS) system for a nonholonomic robot to achieve good trajectory following without real-time robot pose information and without a known visual map of the environment. We call it trajectory servoing. The critical component is a feature-based, indirect SLAM method to provide a pool of available features with estimated depth, so that they may be propagated forward in time to generate image feature trajectories for visual servoing. Short and long distance experiments show the benefits of trajectory servoing for navigating unknown areas without absolute positioning. Trajectory servoing is shown to be more accurate than pose-based feedback when both rely on the same underlying SLAM system.
Long range teleoperation for fine manipulation tasks under time-delay network conditions
Mar 21, 2019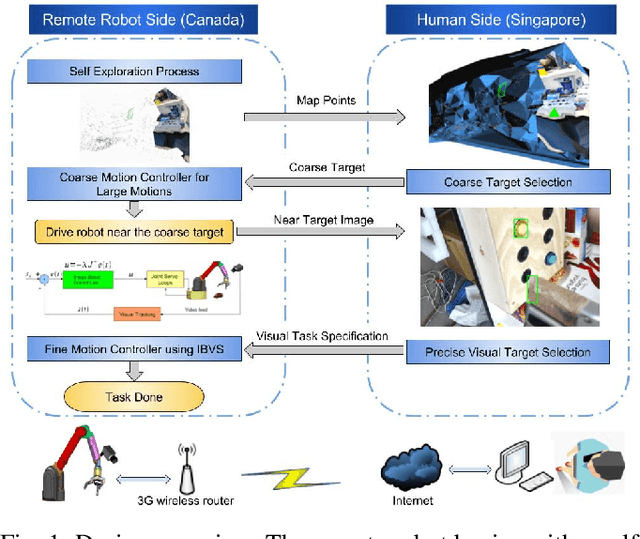
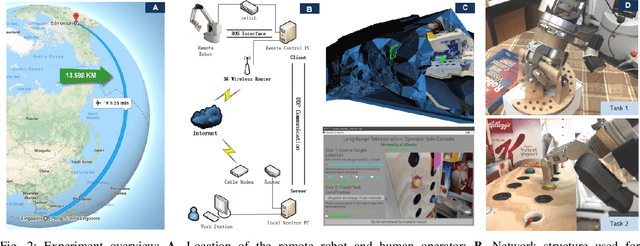
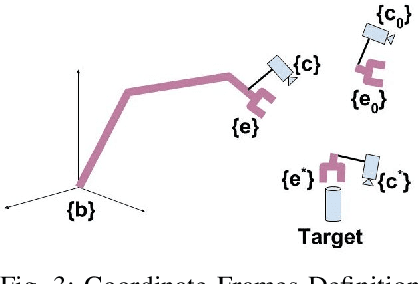
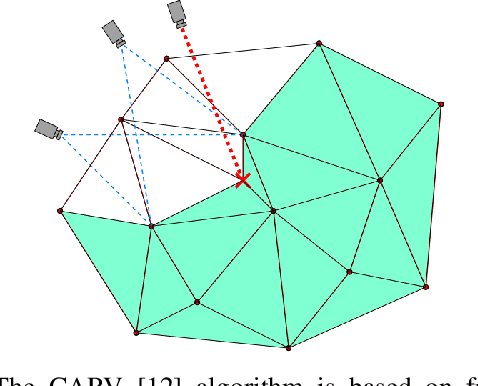
We present a coarse-to-fine approach based semi-autonomous teleoperation system using vision guidance. The system is optimized for long range teleoperation tasks under time-delay network conditions and does not require prior knowledge of the remote scene. Our system initializes with a self exploration behavior that senses the remote surroundings through a freely mounted eye-in-hand web cam. The self exploration stage estimates hand-eye calibration and provides a telepresence interface via real-time 3D geometric reconstruction. The human operator is able to specify a visual task through the interface and a coarse-to-fine controller guides the remote robot enabling our system to work in high latency networks. Large motions are guided by coarse 3D estimation, whereas fine motions use image cues (IBVS). Network data transmission cost is minimized by sending only sparse points and a final image to the human side. Experiments from Singapore to Canada on multiple tasks were conducted to show our system's capability to work in long range teleoperation tasks.
Wave based damage detection in solid structures using artificial neural networks
Mar 30, 2021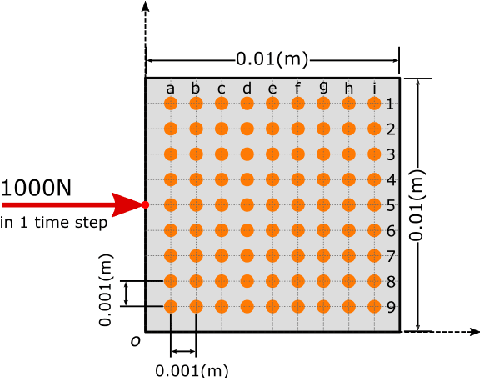

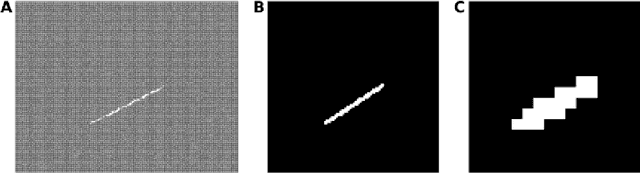
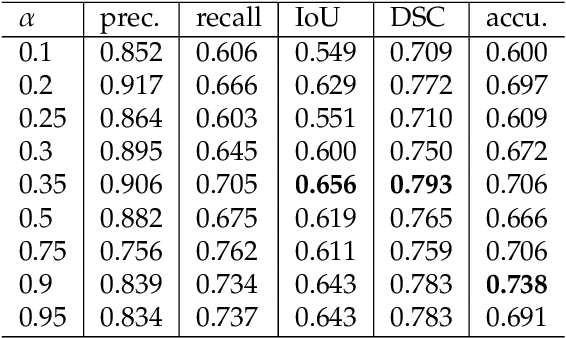
The identification of structural damages takes a more and more important role within the modern economy, where often the monitoring of an infrastructure is the last approach to keep it under public use. Conventional monitoring methods require specialized engineers and are mainly time consuming. This research paper considers the ability of neural networks to recognize the initial or alteration of structural properties based on the training processes. The presented work here is based on Convolutional Neural Networks (CNN) for wave field pattern recognition, or more specifically the wave field change recognition. The CNN model is used to identify the change within propagating wave fields after a crack initiation within the structure. The paper describes the implemented method and the required training procedure to get a successful crack detection accuracy, where the training data are based on the dynamic lattice model. Although the training of the model is still time consuming, the proposed new method has an enormous potential to become a new crack detection or structural health monitoring approach within the conventional monitoring methods.
Predicting sepsis in multi-site, multi-national intensive care cohorts using deep learning
Jul 12, 2021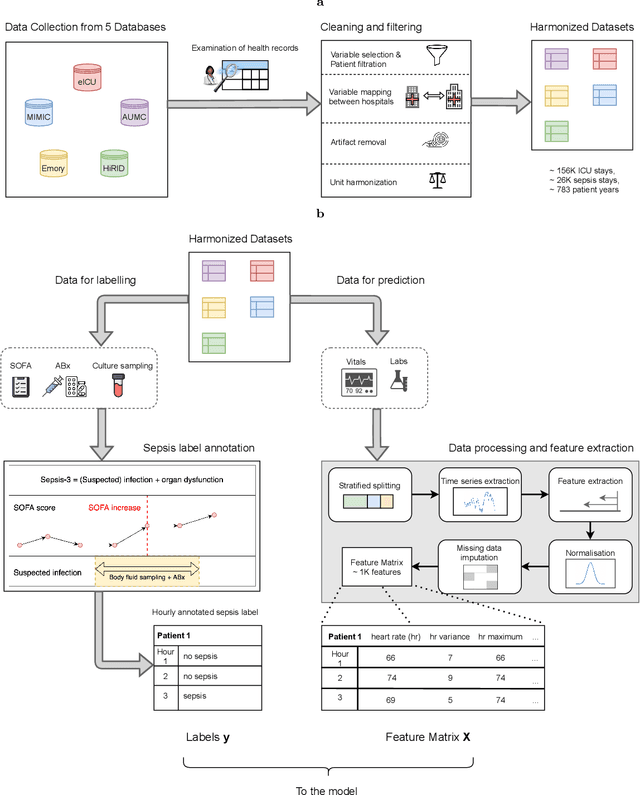
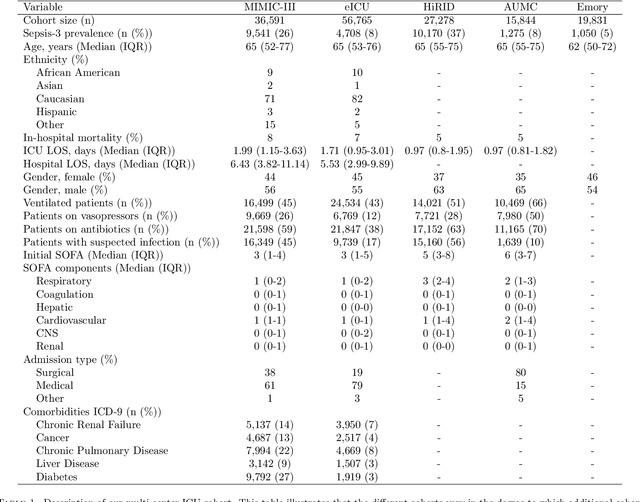
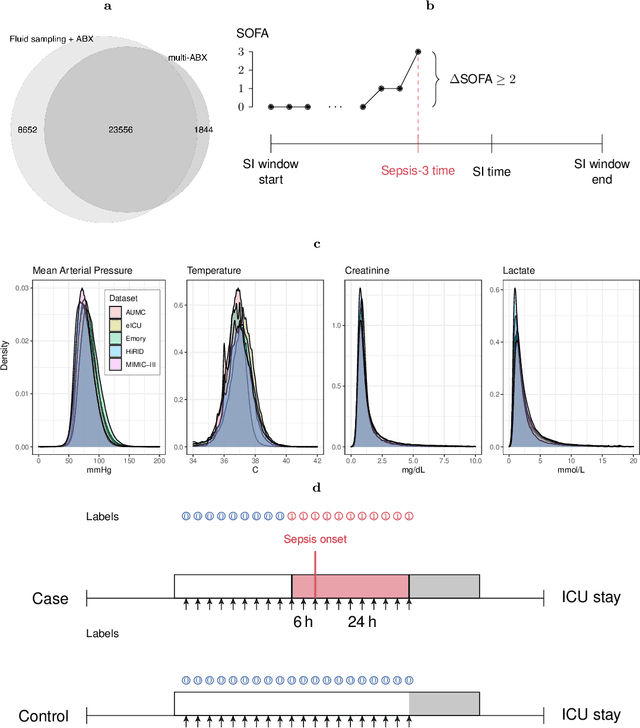
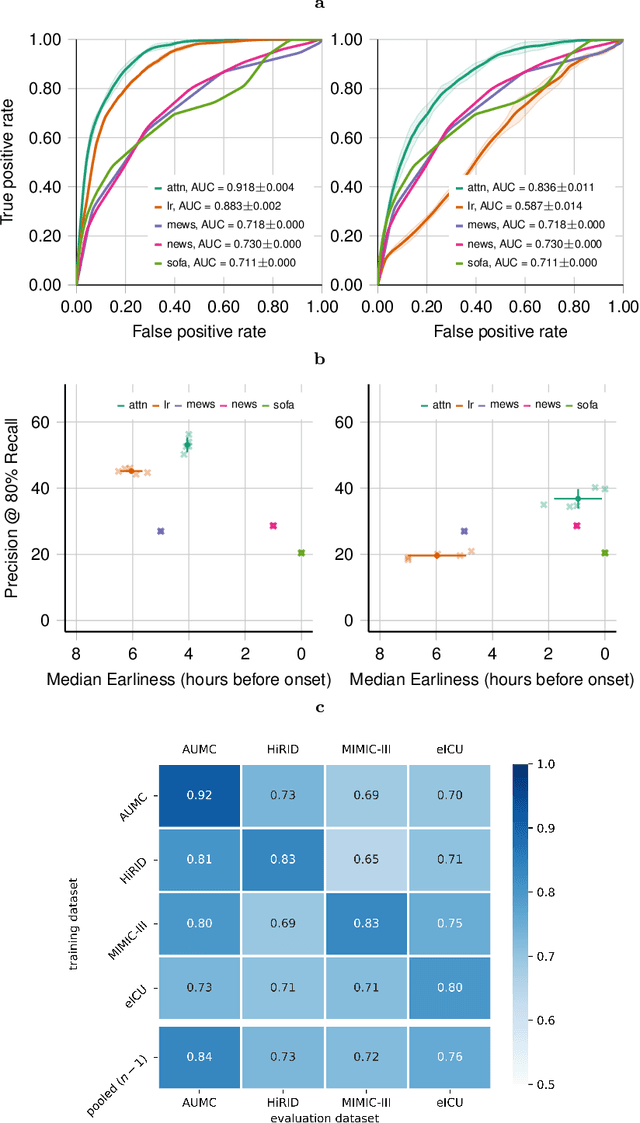
Despite decades of clinical research, sepsis remains a global public health crisis with high mortality, and morbidity. Currently, when sepsis is detected and the underlying pathogen is identified, organ damage may have already progressed to irreversible stages. Effective sepsis management is therefore highly time-sensitive. By systematically analysing trends in the plethora of clinical data available in the intensive care unit (ICU), an early prediction of sepsis could lead to earlier pathogen identification, resistance testing, and effective antibiotic and supportive treatment, and thereby become a life-saving measure. Here, we developed and validated a machine learning (ML) system for the prediction of sepsis in the ICU. Our analysis represents the largest multi-national, multi-centre in-ICU study for sepsis prediction using ML to date. Our dataset contains $156,309$ unique ICU admissions, which represent a refined and harmonised subset of five large ICU databases originating from three countries. Using the international consensus definition Sepsis-3, we derived hourly-resolved sepsis label annotations, amounting to $26,734$ ($17.1\%$) septic stays. We compared our approach, a deep self-attention model, to several clinical baselines as well as ML baselines and performed an extensive internal and external validation within and across databases. On average, our model was able to predict sepsis with an AUROC of $0.847 \pm 0.050$ (internal out-of sample validation) and $0.761 \pm 0.052$ (external validation). For a harmonised prevalence of $17\%$, at $80\%$ recall our model detects septic patients with $39\%$ precision 3.7 hours in advance.