 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Read, Attend, and Code: Pushing the Limits of Medical Codes Prediction from Clinical Notes by Machines
Jul 10, 2021
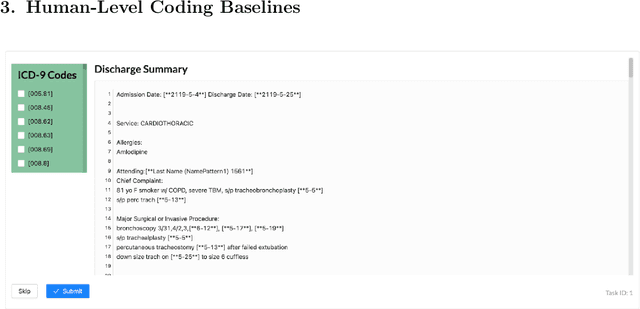

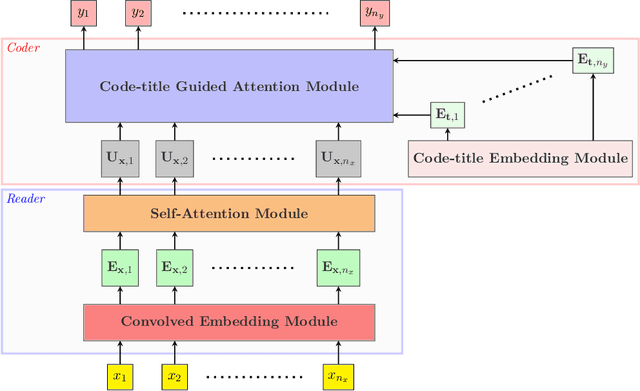
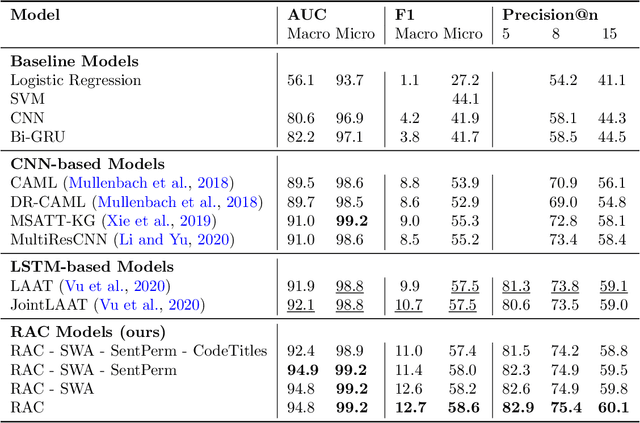
Prediction of medical codes from clinical notes is both a practical and essential need for every healthcare delivery organization within current medical systems. Automating annotation will save significant time and excessive effort spent by human coders today. However, the biggest challenge is directly identifying appropriate medical codes out of several thousands of high-dimensional codes from unstructured free-text clinical notes. In the past three years, with Convolutional Neural Networks (CNN) and Long Short-Term Memory (LTSM) networks, there have been vast improvements in tackling the most challenging benchmark of the MIMIC-III-full-label inpatient clinical notes dataset. This progress raises the fundamental question of how far automated machine learning (ML) systems are from human coders' working performance. We assessed the baseline of human coders' performance on the same subsampled testing set. We also present our Read, Attend, and Code (RAC) model for learning the medical code assignment mappings. By connecting convolved embeddings with self-attention and code-title guided attention modules, combined with sentence permutation-based data augmentations and stochastic weight averaging training, RAC establishes a new state of the art (SOTA), considerably outperforming the current best Macro-F1 by 18.7%, and reaches past the human-level coding baseline. This new milestone marks a meaningful step toward fully autonomous medical coding (AMC) in machines reaching parity with human coders' performance in medical code prediction.
RaspberryPI for mosquito neutralization by power laser
May 20, 2021
In this article for the first time, comprehensive studies of mosquito neutralization using machine vision and a 1 W power laser are considered. Developed laser installation with Raspberry Pi that changing the direction of the laser with a galvanometer. We developed a program for mosquito tracking in real. The possibility of using deep neural networks, Haar cascades, machine learning for mosquito recognition was considered. We considered in detail the classification problems of mosquitoes in images. A recommendation is given for the implementation of this device based on a microcontroller for subsequent use as part of an unmanned aerial vehicle. Any harmful insects in the fields can be used as objects for control.
A Broad Class of Discrete-Time Hypercomplex-Valued Hopfield Neural Networks
Feb 14, 2019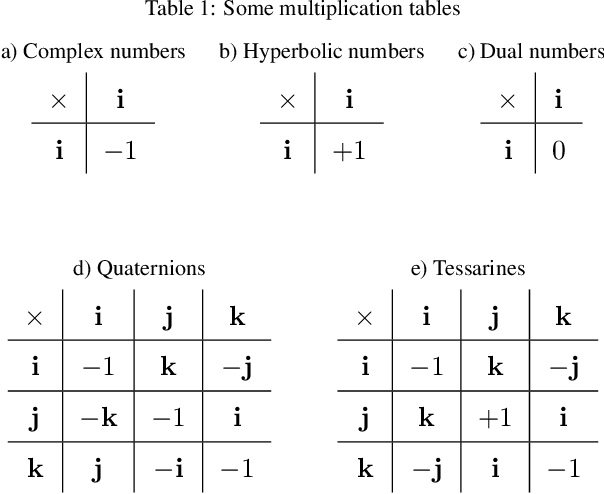
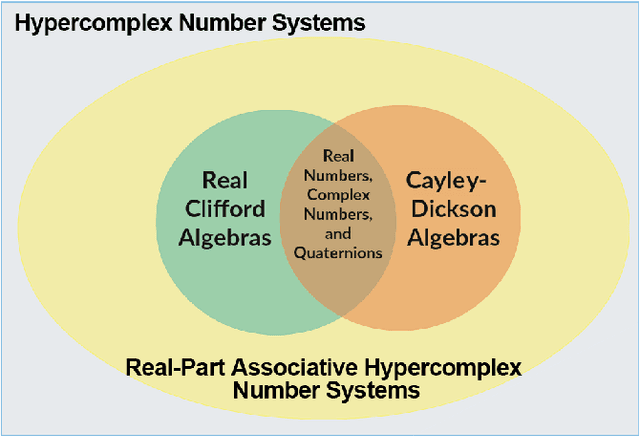
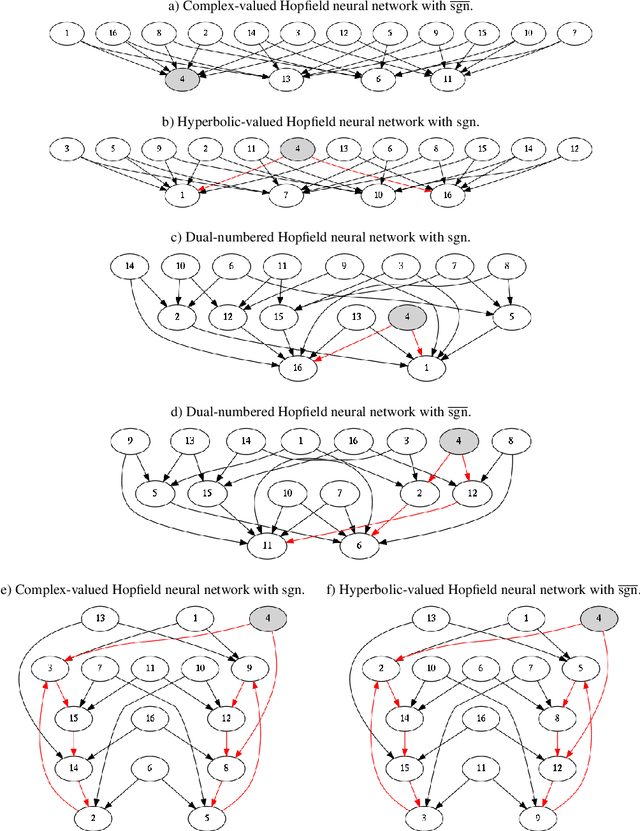
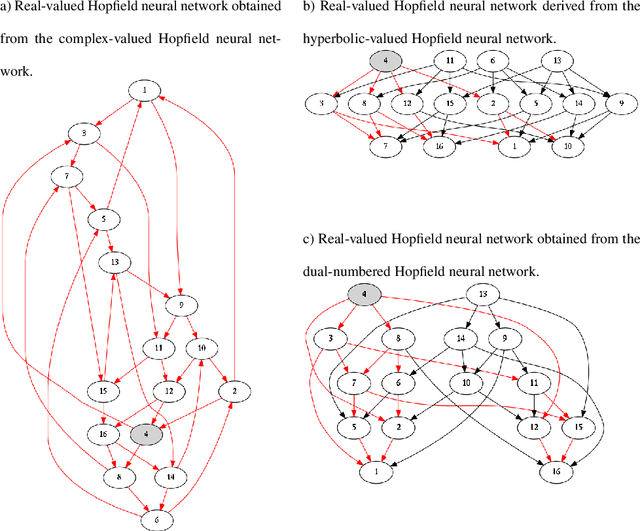
In this paper, we address the stability of a broad class of discrete-time hypercomplex-valued Hopfield-type neural networks. To ensure the neural networks belonging to this class always settle down at a stationary state, we introduce novel hypercomplex number systems referred to as Hopfield-type hypercomplex number systems. Hopfield-type hypercomplex number systems generalize the well-known Cayley-Dickson algebras and real Clifford algebras and include the systems of real numbers, complex numbers, dual numbers, hyperbolic numbers, quaternions, tessarines, and octonions as particular instances. Apart from the novel hypercomplex number systems, we introduce a family of hypercomplex-valued activation functions called Hopfield-type activation functions. Broadly speaking, a Hopfield-type activation function projects the activation potential onto the set of all possible states of a hypercomplex-valued neuron. Using the theory presented in this paper, we confirm the stability analysis of several discrete-time hypercomplex-valued Hopfield-type neural networks from the literature. Moreover, we introduce and provide the stability analysis of a general class of Hopfield-type neural networks on Cayley-Dickson algebras.
Interpretable Categorization of Heterogeneous Time Series Data
Jan 26, 2018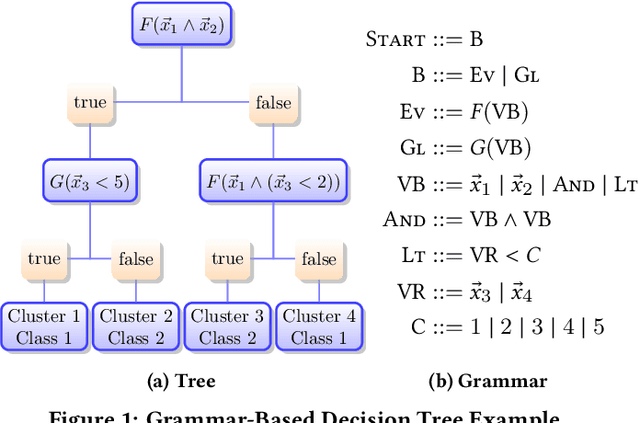
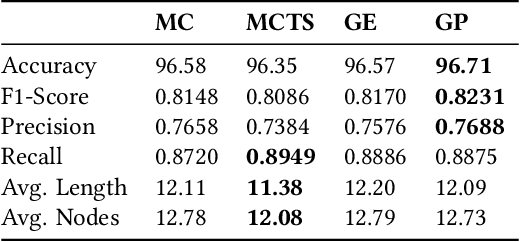
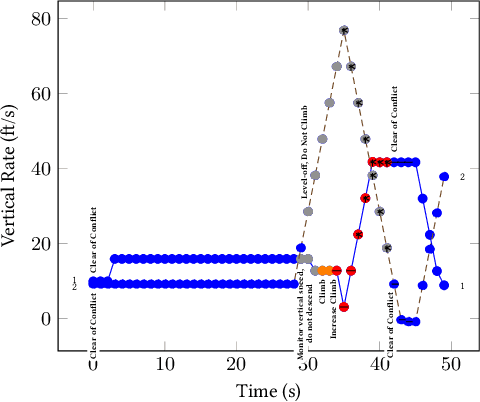
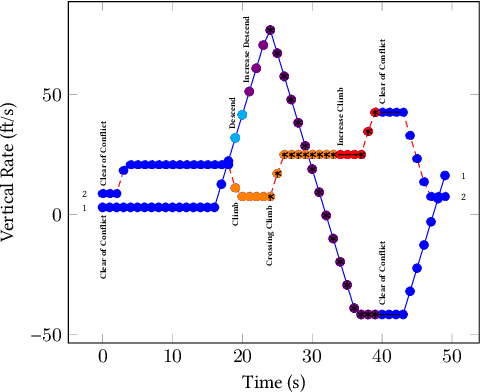
Understanding heterogeneous multivariate time series data is important in many applications ranging from smart homes to aviation. Learning models of heterogeneous multivariate time series that are also human-interpretable is challenging and not adequately addressed by the existing literature. We propose grammar-based decision trees (GBDTs) and an algorithm for learning them. GBDTs extend decision trees with a grammar framework. Logical expressions derived from a context-free grammar are used for branching in place of simple thresholds on attributes. The added expressivity enables support for a wide range of data types while retaining the interpretability of decision trees. In particular, when a grammar based on temporal logic is used, we show that GBDTs can be used for the interpretable classi cation of high-dimensional and heterogeneous time series data. Furthermore, we show how GBDTs can also be used for categorization, which is a combination of clustering and generating interpretable explanations for each cluster. We apply GBDTs to analyze the classic Australian Sign Language dataset as well as data on near mid-air collisions (NMACs). The NMAC data comes from aircraft simulations used in the development of the next-generation Airborne Collision Avoidance System (ACAS X).
A Machine Learning Model for Early Detection of Diabetic Foot using Thermogram Images
Jun 27, 2021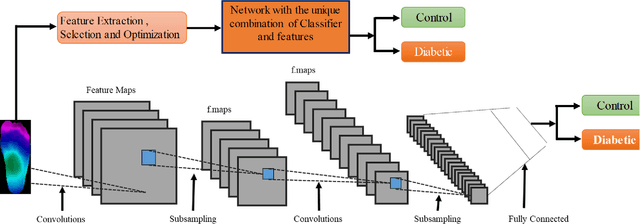
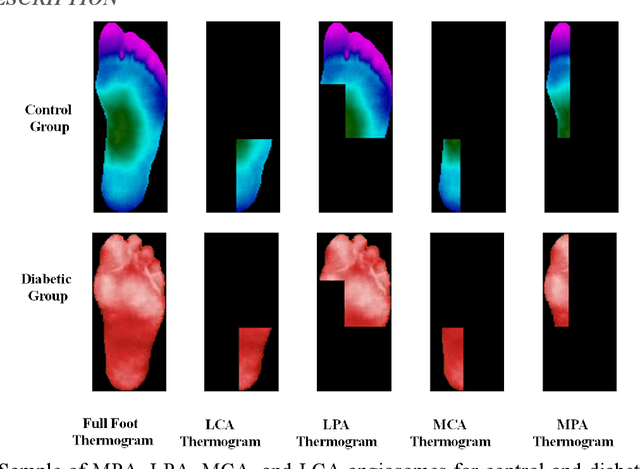
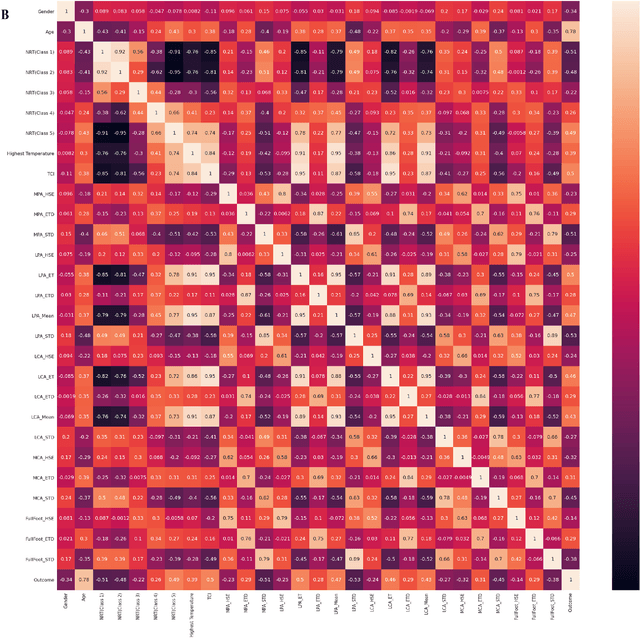
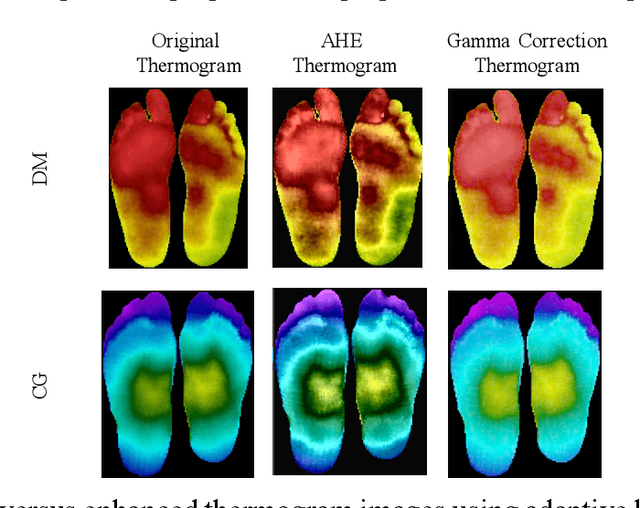
Diabetes foot ulceration (DFU) and amputation are a cause of significant morbidity. The prevention of DFU may be achieved by the identification of patients at risk of DFU and the institution of preventative measures through education and offloading. Several studies have reported that thermogram images may help to detect an increase in plantar temperature prior to DFU. However, the distribution of plantar temperature may be heterogeneous, making it difficult to quantify and utilize to predict outcomes. We have compared a machine learning-based scoring technique with feature selection and optimization techniques and learning classifiers to several state-of-the-art Convolutional Neural Networks (CNNs) on foot thermogram images and propose a robust solution to identify the diabetic foot. A comparatively shallow CNN model, MobilenetV2 achieved an F1 score of ~95% for a two-feet thermogram image-based classification and the AdaBoost Classifier used 10 features and achieved an F1 score of 97 %. A comparison of the inference time for the best-performing networks confirmed that the proposed algorithm can be deployed as a smartphone application to allow the user to monitor the progression of the DFU in a home setting.
DSRN: an Efficient Deep Network for Image Relighting
Feb 18, 2021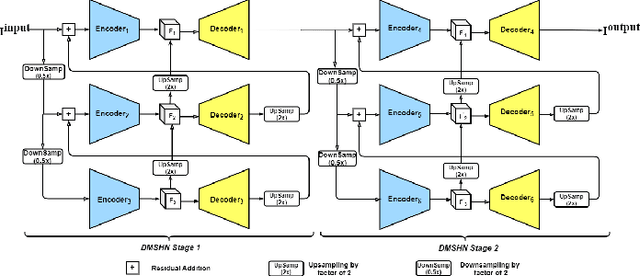
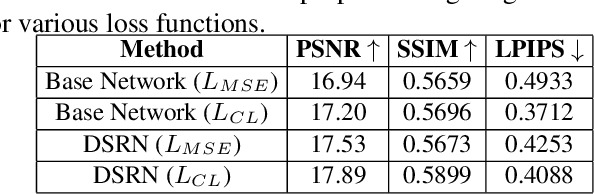
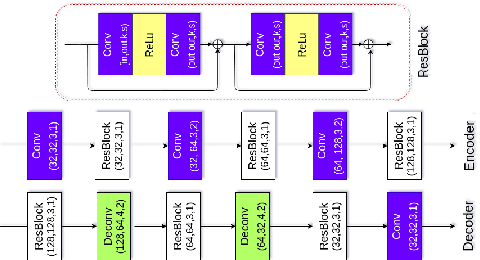
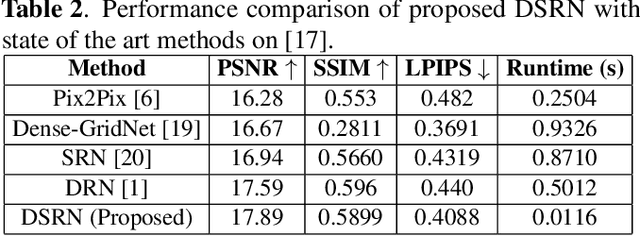
Custom and natural lighting conditions can be emulated in images of the scene during post-editing. Extraordinary capabilities of the deep learning framework can be utilized for such purpose. Deep image relighting allows automatic photo enhancement by illumination-specific retouching. Most of the state-of-the-art methods for relighting are run-time intensive and memory inefficient. In this paper, we propose an efficient, real-time framework Deep Stacked Relighting Network (DSRN) for image relighting by utilizing the aggregated features from input image at different scales. Our model is very lightweight with total size of about 42 MB and has an average inference time of about 0.0116s for image of resolution $1024 \times 1024$ which is faster as compared to other multi-scale models. Our solution is quite robust for translating image color temperature from input image to target image and also performs moderately for light gradient generation with respect to the target image. Additionally, we show that if images illuminated from opposite directions are used as input, the qualitative results improve over using a single input image.
Recursive CSI Quantization of Time-Correlated MIMO Channels by Deep Learning Classification
Sep 28, 2020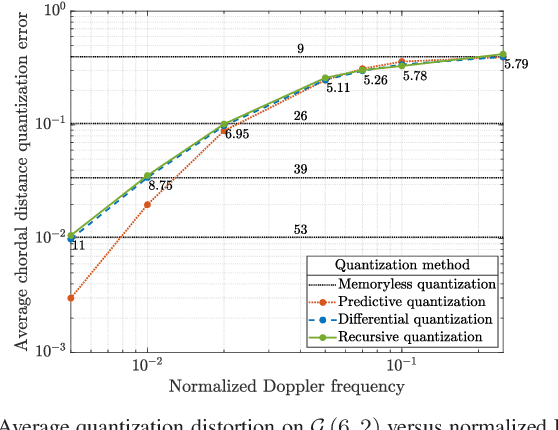
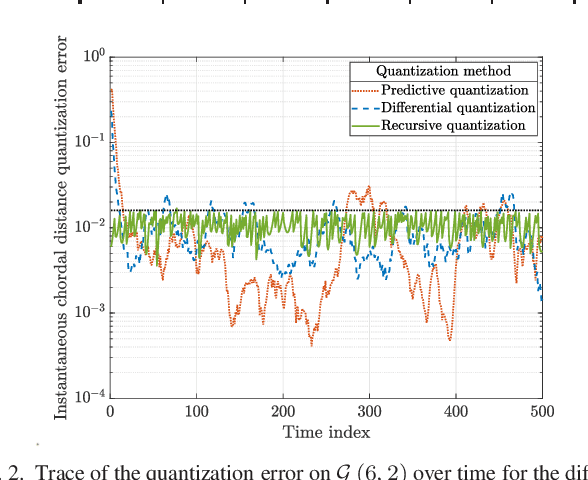
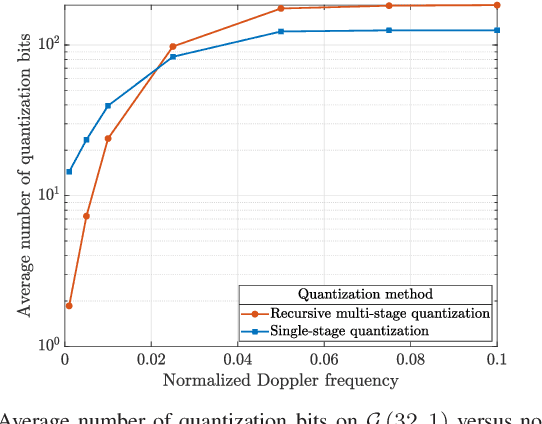
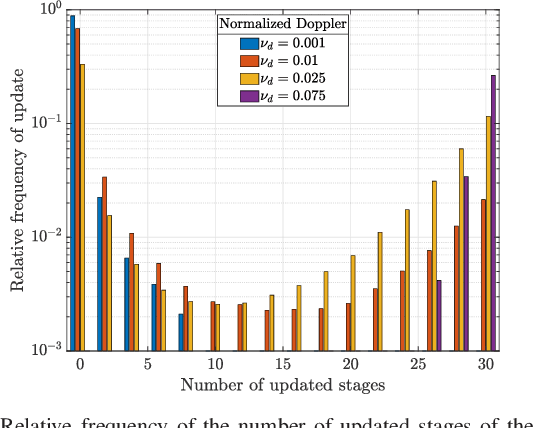
In frequency division duplex (FDD) multiple-input multiple-output (MIMO) wireless communications, limited channel state information (CSI) feedback is a central tool to support advanced single- and multi-user MIMO beamforming/precoding. To achieve a given CSI quality, the CSI quantization codebook size has to grow exponentially with the number of antennas, leading to quantization complexity, as well as, feedback overhead issues for larger MIMO systems. We have recently proposed a multi-stage recursive Grassmannian quantizer that enables a significant complexity reduction of CSI quantization. In this paper, we show that this recursive quantizer can effectively be combined with deep learning classification to further reduce the complexity, and that it can exploit temporal channel correlations to reduce the CSI feedback overhead.
Energy-Efficient Adaptive System Reconfiguration for Dynamic Deadlines in Autonomous Driving
Jun 03, 2021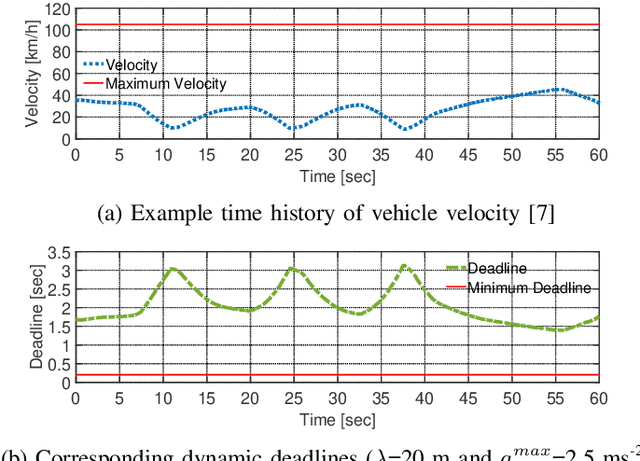
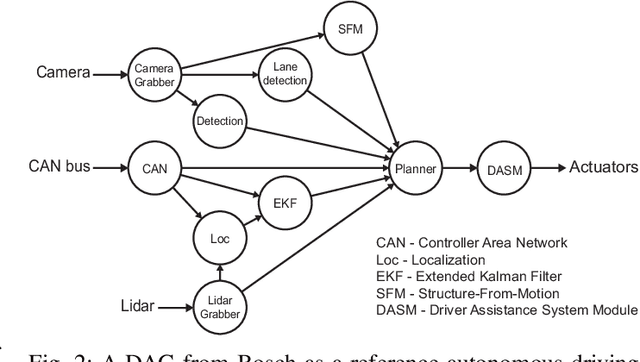
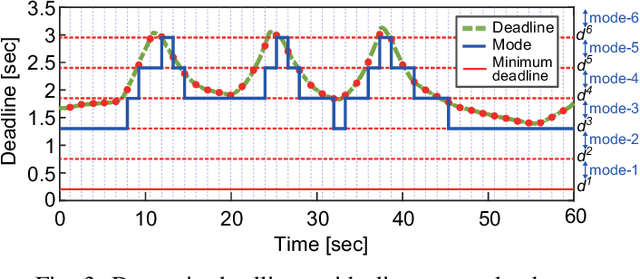
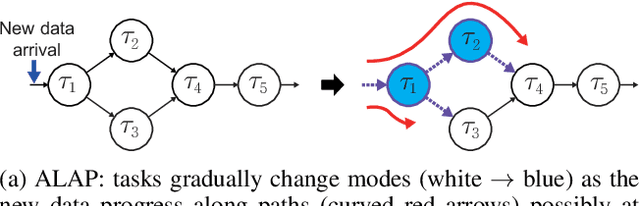
The increasing computing demands of autonomous driving applications make energy optimizations critical for reducing battery capacity and vehicle weight. Current energy optimization methods typically target traditional real-time systems with static deadlines, resulting in conservative energy savings that are unable to exploit additional energy optimizations due to dynamic deadlines arising from the vehicle's change in velocity and driving context. We present an adaptive system optimization and reconfiguration approach that dynamically adapts the scheduling parameters and processor speeds to satisfy dynamic deadlines while consuming as little energy as possible. Our experimental results with an autonomous driving task set from Bosch and real-world driving data show energy reductions up to 46.4% on average in typical dynamic driving scenarios compared with traditional static energy optimization methods, demonstrating great potential for dynamic energy optimization gains by exploiting dynamic deadlines.
Carnegie Mellon Team Tartan: Mission-level Robustness with Rapidly Deployed Autonomous Aerial Vehicles in the MBZIRC 2020
Jul 03, 2021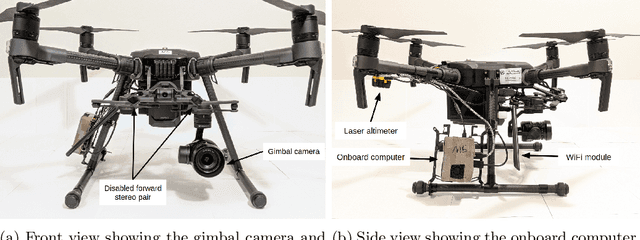

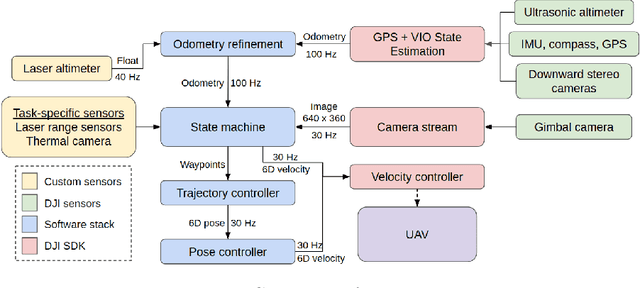
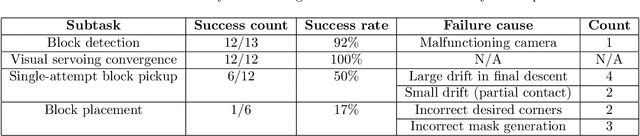
For robotics systems to be used in high risk, real-world situations, they have to be quickly deployable and robust to environmental changes, under-performing hardware, and mission subtask failures. Robots are often designed to consider a single sequence of mission events, with complex algorithms lowering individual subtask failure rates under some critical constraints. Our approach is to leverage common techniques in vision and control and encode robustness into mission structure through outcome monitoring and recovery strategies, aided by a system infrastructure that allows for quick mission deployments under tight time constraints and no central communication. We also detail lessons in rapid field robotics development and testing. Systems were developed and evaluated through real-robot experiments at an outdoor test site in Pittsburgh, Pennsylvania, USA, as well as in the 2020 Mohamed Bin Zayed International Robotics Challenge. All competition trials were completed in fully autonomous mode without RTK-GPS. Our system led to 4th place in Challenge 2 and 7th place in the Grand Challenge, and achievements like popping five balloons (Challenge 1), successfully picking and placing a block (Challenge 2), and dispensing the most water autonomously with a UAV of all teams onto an outdoor, real fire (Challenge 3).
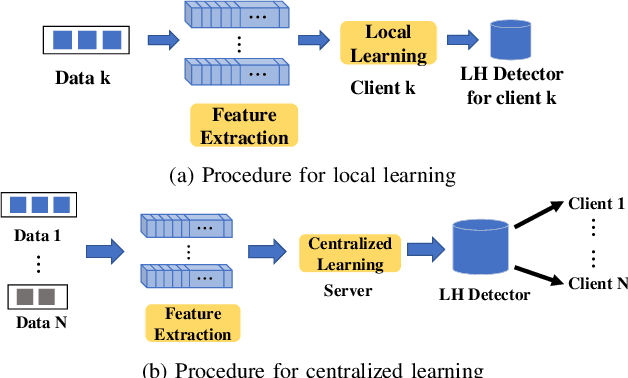
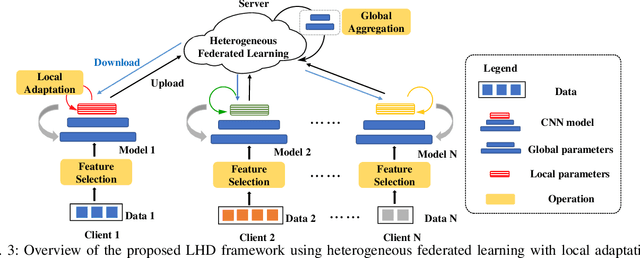
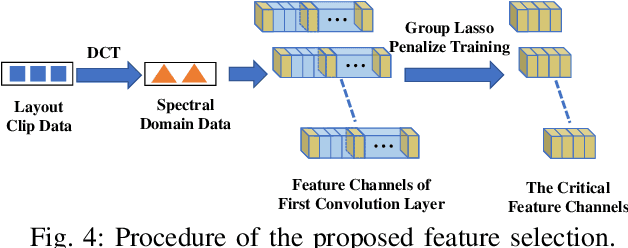
Lithography Hotspot Detection via Heterogeneous Federated Learning with Local Adaptation
Jul 15, 2021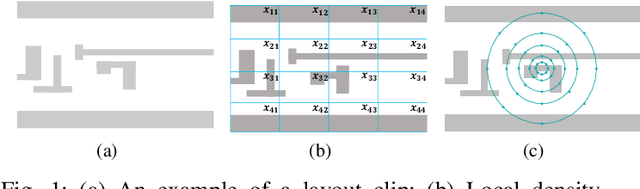
As technology scaling is approaching the physical limit, lithography hotspot detection has become an essential task in design for manufacturability. While the deployment of pattern matching or machine learning in hotspot detection can help save significant simulation time, such methods typically demand for non-trivial quality data to build the model, which most design houses are short of. Moreover, the design houses are also unwilling to directly share such data with the other houses to build a unified model, which can be ineffective for the design house with unique design patterns due to data insufficiency. On the other hand, with data homogeneity in each design house, the locally trained models can be easily over-fitted, losing generalization ability and robustness. In this paper, we propose a heterogeneous federated learning framework for lithography hotspot detection that can address the aforementioned issues. On one hand, the framework can build a more robust centralized global sub-model through heterogeneous knowledge sharing while keeping local data private. On the other hand, the global sub-model can be combined with a local sub-model to better adapt to local data heterogeneity. The experimental results show that the proposed framework can overcome the challenge of non-independent and identically distributed (non-IID) data and heterogeneous communication to achieve very high performance in comparison to other state-of-the-art methods while guaranteeing a good convergence rate in various scenarios.