 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Medical Concept Embedding with Time-Aware Attention
Jun 06, 2018
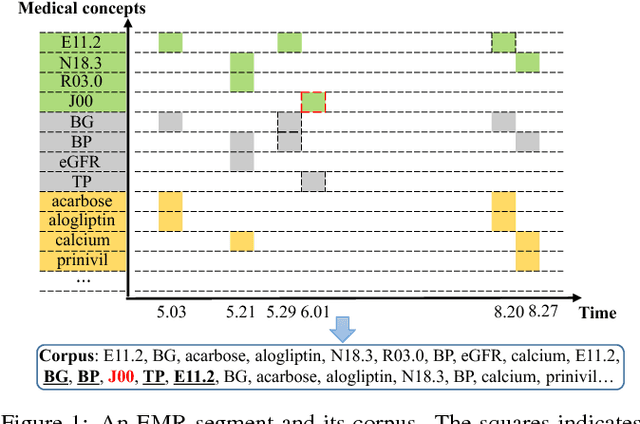
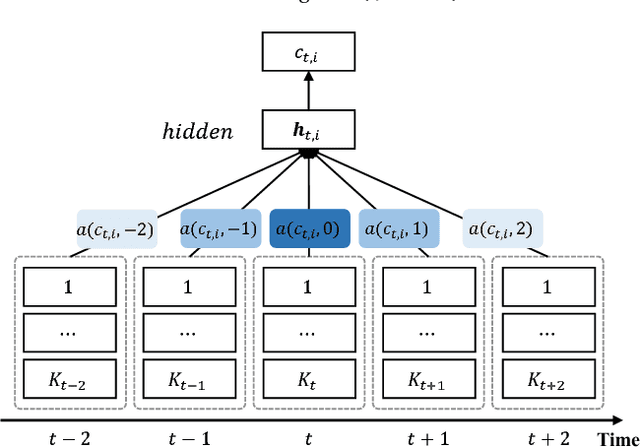

Embeddings of medical concepts such as medication, procedure and diagnosis codes in Electronic Medical Records (EMRs) are central to healthcare analytics. Previous work on medical concept embedding takes medical concepts and EMRs as words and documents respectively. Nevertheless, such models miss out the temporal nature of EMR data. On the one hand, two consecutive medical concepts do not indicate they are temporally close, but the correlations between them can be revealed by the time gap. On the other hand, the temporal scopes of medical concepts often vary greatly (e.g., \textit{common cold} and \textit{diabetes}). In this paper, we propose to incorporate the temporal information to embed medical codes. Based on the Continuous Bag-of-Words model, we employ the attention mechanism to learn a "soft" time-aware context window for each medical concept. Experiments on public and proprietary datasets through clustering and nearest neighbour search tasks demonstrate the effectiveness of our model, showing that it outperforms five state-of-the-art baselines.
Nominal Unification and Matching of Higher Order Expressions with Recursive Let
Feb 16, 2021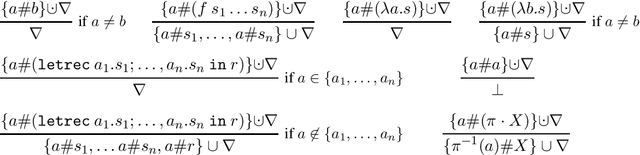
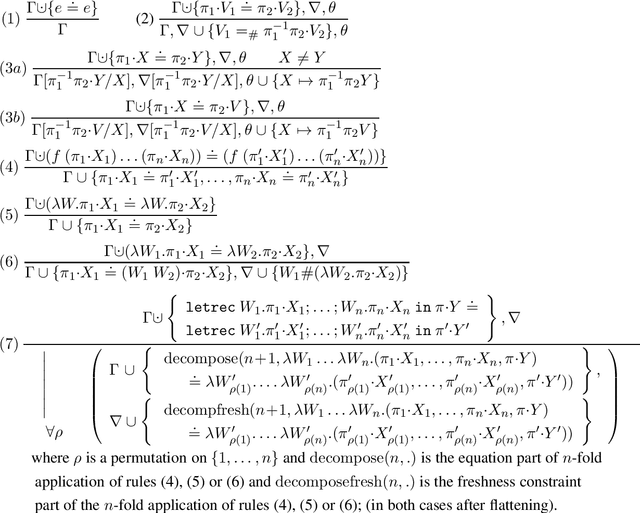
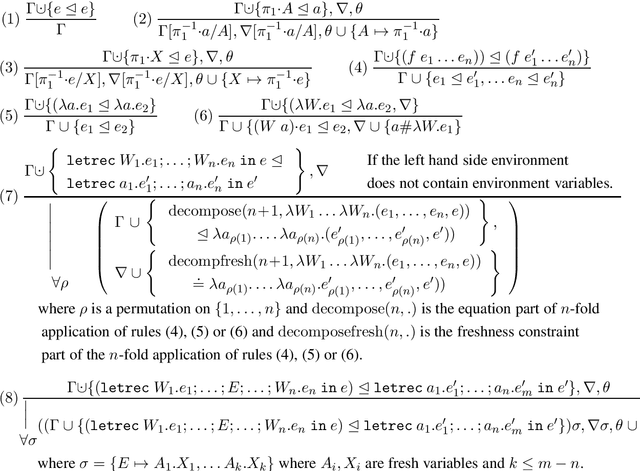
A sound and complete algorithm for nominal unification of higher-order expressions with a recursive let is described, and shown to run in nondeterministic polynomial time. We also explore specializations like nominal letrec-matching for expressions, for DAGs, and for garbage-free expressions and determine their complexity. Finally, we also provide a nominal unification algorithm for higher-order expressions with recursive let and atom-variables, where we show that it also runs in nondeterministic polynomial time.
Co-evolutionary multi-task learning for dynamic time series prediction
Jun 13, 2018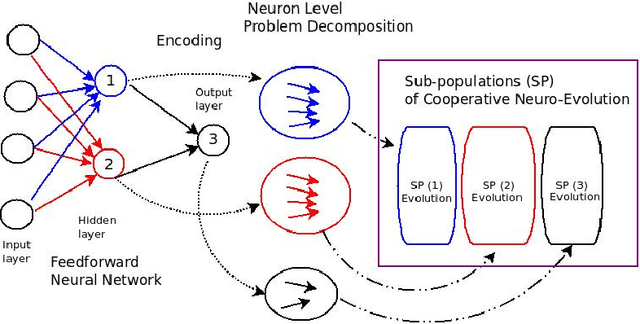
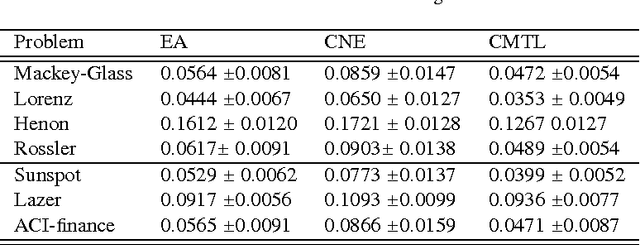
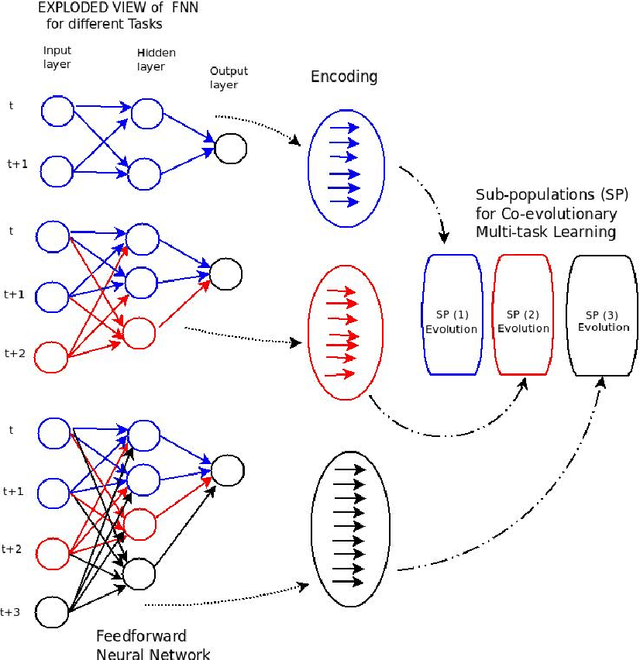
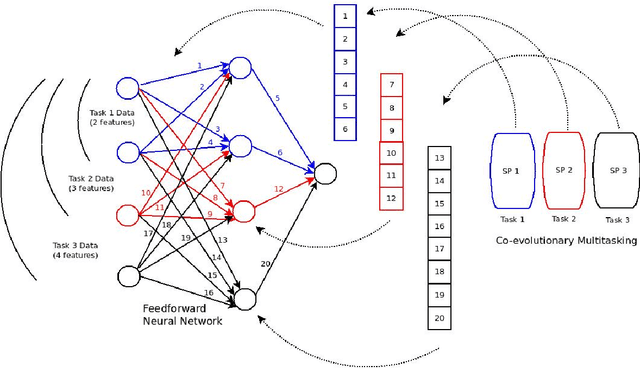
Time series prediction typically consists of a data reconstruction phase where the time series is broken into overlapping windows known as the timespan. The size of the timespan can be seen as a way of determining the extent of past information required for an effective prediction. In certain applications such as the prediction of wind-intensity of storms and cyclones, prediction models need to be dynamic in accommodating different values of the timespan. These applications require robust prediction as soon as the event takes place. We identify a new category of problem called dynamic time series prediction that requires a model to give prediction when presented with varying lengths of the timespan. In this paper, we propose a co-evolutionary multi-task learning method that provides a synergy between multi-task learning and co-evolutionary algorithms to address dynamic time series prediction. The method features effective use of building blocks of knowledge inspired by dynamic programming and multi-task learning. It enables neural networks to retain modularity during training for making a decision in situations even when certain inputs are missing. The effectiveness of the method is demonstrated using one-step-ahead chaotic time series and tropical cyclone wind-intensity prediction.
A System for Traded Control Teleoperation of Manipulation Tasks using Intent Prediction from Hand Gestures
Jul 05, 2021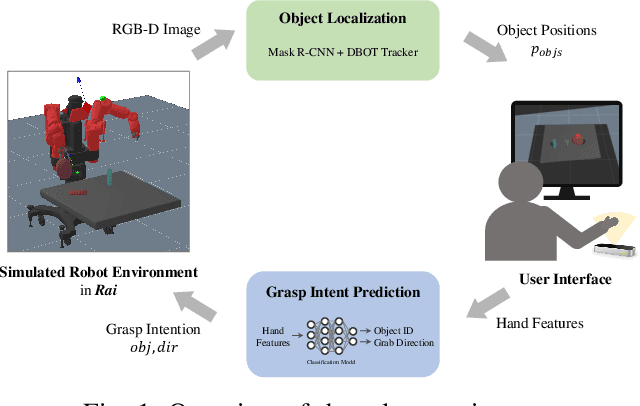
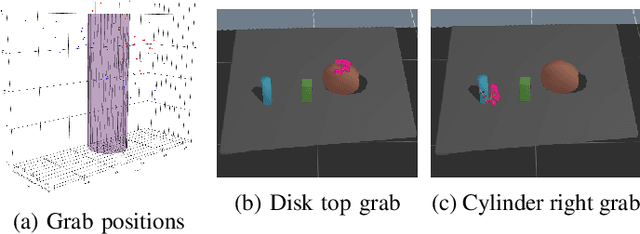
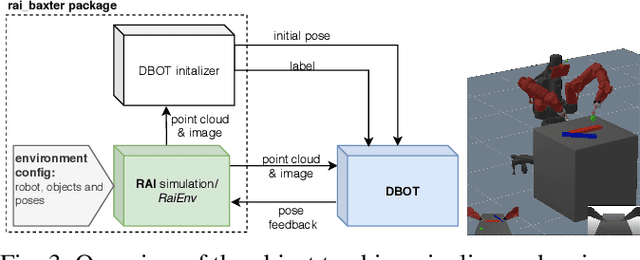
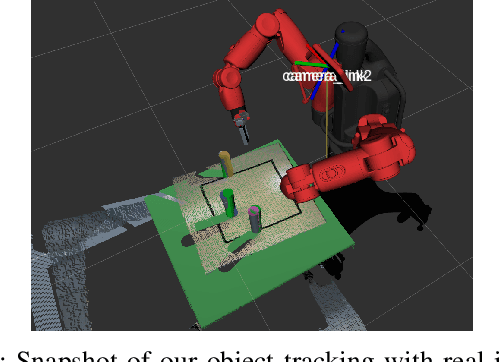
This paper presents a teleoperation system that includes robot perception and intent prediction from hand gestures. The perception module identifies the objects present in the robot workspace and the intent prediction module which object the user likely wants to grasp. This architecture allows the approach to rely on traded control instead of direct control: we use hand gestures to specify the goal objects for a sequential manipulation task, the robot then autonomously generates a grasping or a retrieving motion using trajectory optimization. The perception module relies on the model-based tracker to precisely track the 6D pose of the objects and makes use of a state of the art learning-based object detection and segmentation method, to initialize the tracker by automatically detecting objects in the scene. Goal objects are identified from user hand gestures using a trained a multi-layer perceptron classifier. After presenting all the components of the system and their empirical evaluation, we present experimental results comparing our pipeline to a direct traded control approach (i.e., one that does not use prediction) which shows that using intent prediction allows to bring down the overall task execution time.
Linear systems with neural network nonlinearities: Improved stability analysis via acausal Zames-Falb multipliers
Mar 31, 2021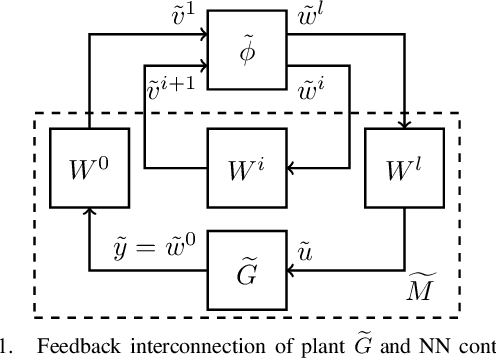
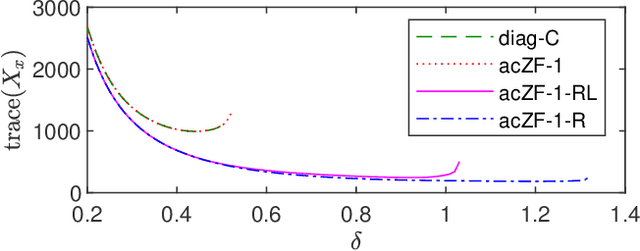
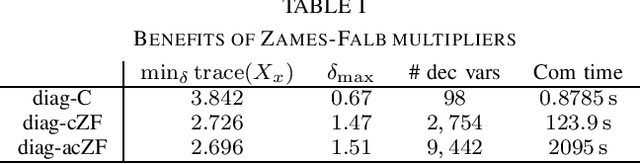
In this paper, we analyze the stability of feedback interconnections of a linear time-invariant system with a neural network nonlinearity in discrete time. Our analysis is based on abstracting neural networks using integral quadratic constraints (IQCs), exploiting the sector-bounded and slope-restricted structure of the underlying activation functions. In contrast to existing approaches, we leverage the full potential of dynamic IQCs to describe the nonlinear activation functions in a less conservative fashion. To be precise, we consider multipliers based on the full-block Yakubovich / circle criterion in combination with acausal Zames-Falb multipliers, leading to linear matrix inequality based stability certificates. Our approach provides a flexible and versatile framework for stability analysis of feedback interconnections with neural network nonlinearities, allowing to trade off computational efficiency and conservatism. Finally, we provide numerical examples that demonstrate the applicability of the proposed framework and the achievable improvements over previous approaches.
Never guess what I heard... Rumor Detection in Finnish News: a Dataset and a Baseline
Jun 07, 2021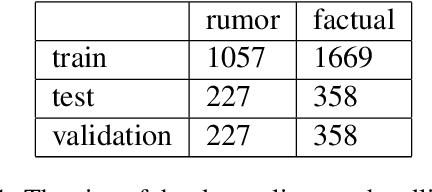
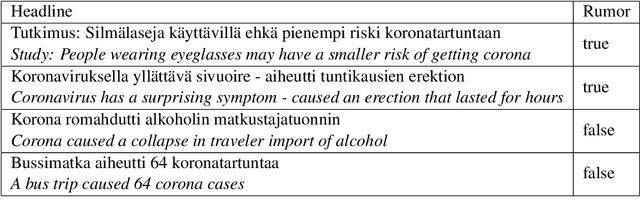
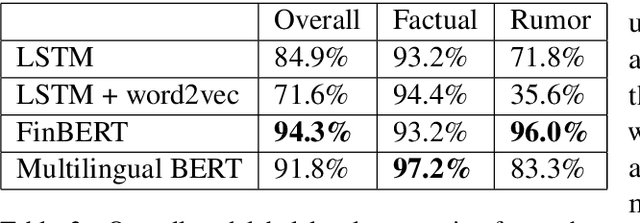
This study presents a new dataset on rumor detection in Finnish language news headlines. We have evaluated two different LSTM based models and two different BERT models, and have found very significant differences in the results. A fine-tuned FinBERT reaches the best overall accuracy of 94.3% and rumor label accuracy of 96.0% of the time. However, a model fine-tuned on Multilingual BERT reaches the best factual label accuracy of 97.2%. Our results suggest that the performance difference is due to a difference in the original training data. Furthermore, we find that a regular LSTM model works better than one trained with a pretrained word2vec model. These findings suggest that more work needs to be done for pretrained models in Finnish language as they have been trained on small and biased corpora.
The Kaleidoscope of Privacy: Differences across French, German, UK, and US GDPR Media Discourse
Mar 31, 2021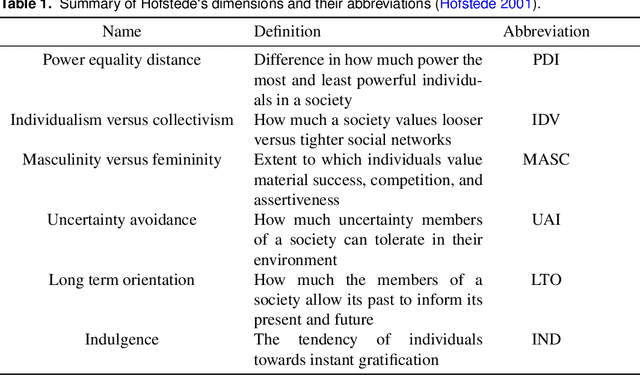
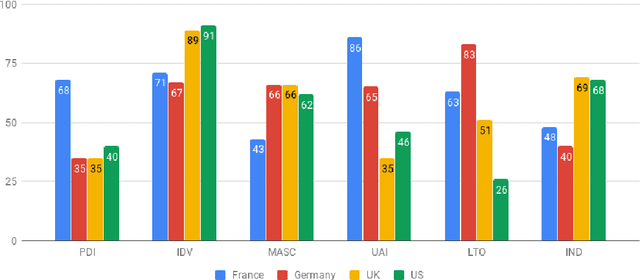
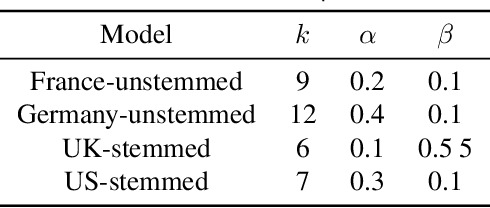
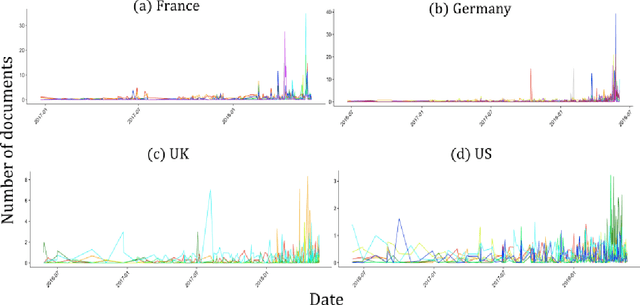
Conceptions of privacy differ by culture. In the Internet age, digital tools continuously challenge the way users, technologists, and governments define, value, and protect privacy. National and supranational entities attempt to regulate privacy and protect data managed online. The European Union passed the General Data Protection Regulation (GDPR), which took effect on 25 May 2018. The research presented here draws on two years of media reporting on GDPR from French, German, UK, and US sources. We use the unsupervised machine learning method of topic modelling to compare the thematic structure of the news articles across time and geographic regions. Our work emphasises the relevance of regional differences regarding valuations of privacy and potential obstacles to the implementation of unilateral data protection regulation such as GDPR. We find that the topics and trends over time in GDPR media coverage of the four countries reflect the differences found across their traditional privacy cultures.
Hole Detection and Healing in Hybrid Sensor Networks
Jun 20, 2021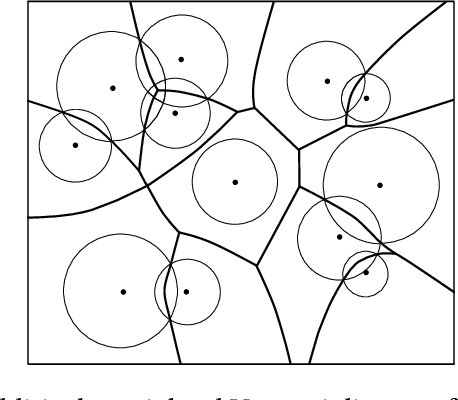
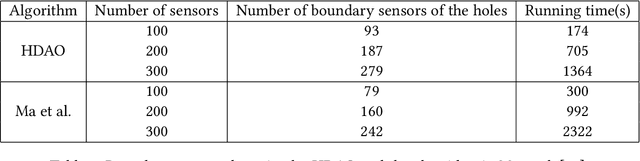
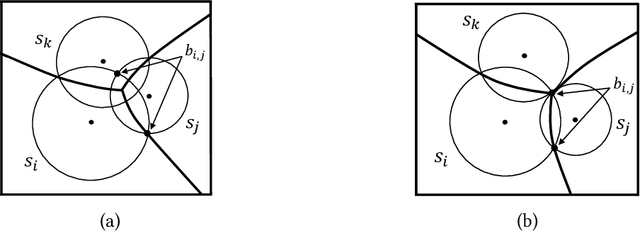
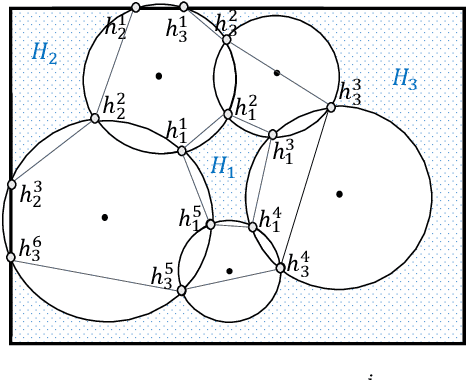
Although monitoring and covering are fundamental goals of a wireless sensor network (WSN), the accidental death of sensors or the running out of their energy would result in holes in the WSN. Such holes have the potential to disrupt the primary functions of WSNs. This paper investigates the hole detection and healing problems in hybrid WSNs with non-identical sensor sensing ranges. In particular, we aim to propose centralized algorithms for detecting holes in a given region and maximizing the area covered by a WSN in the presence of environmental obstacles. To precisely identify the boundary of the holes, we use an additively weighted Voronoi diagram and a polynomial-time algorithm.Furthermore, since this problem is known to be computationally difficult, we propose a centralized greedy 1/2-approximation algorithm to maximize the area covered by sensors. Finally, we implement the algorithms and run simulations to show that our approximation algorithm efficiently covers the holes by moving the mobile sensors.
Supermodular Optimization for Redundant Robot Assignment under Travel-Time Uncertainty
Apr 13, 2018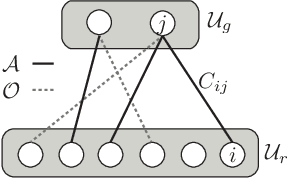
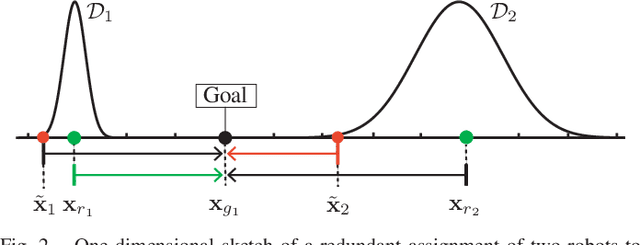
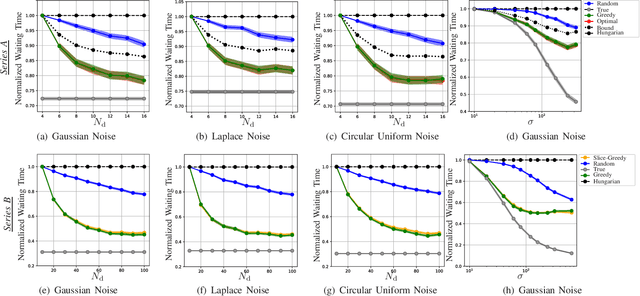
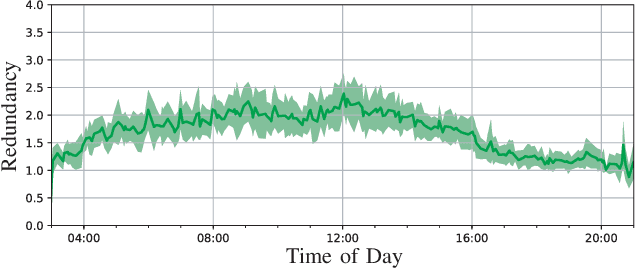
This paper considers the assignment of multiple mobile robots to goal locations under uncertain travel time estimates. Our aim is to produce optimal assignments, such that the average waiting time at destinations is minimized. Our premise is that time is the most valuable asset in the system. Hence, we make use of redundant robots to counter the effect of uncertainty. Since solving the redundant assignment problem is strongly NP-hard, we exploit structural properties of our problem to propose a polynomial-time, near-optimal solution. We demonstrate that our problem can be reduced to minimizing a supermodular cost function subject to a matroid constraint. This allows us to develop a greedy algorithm, for which we derive sub-optimality bounds. A comparison with the baseline non-redundant assignment shows that redundant assignment reduces the waiting time at goals, and that this performance gap increases as noise increases. Finally, we evaluate our method on a mobility data set (specifying vehicle availability and passenger requests), recorded in the area of Manhattan, New York. Our algorithm performs in real-time, and reduces passenger waiting times when travel times are uncertain.
A Novel CropdocNet for Automated Potato Late Blight Disease Detection from the Unmanned Aerial Vehicle-based Hyperspectral Imagery
Jul 28, 2021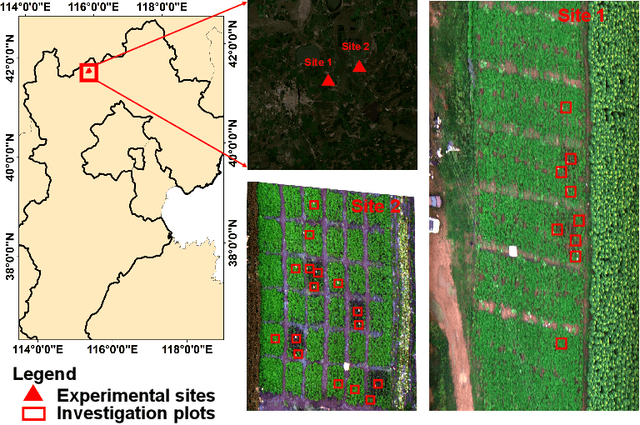

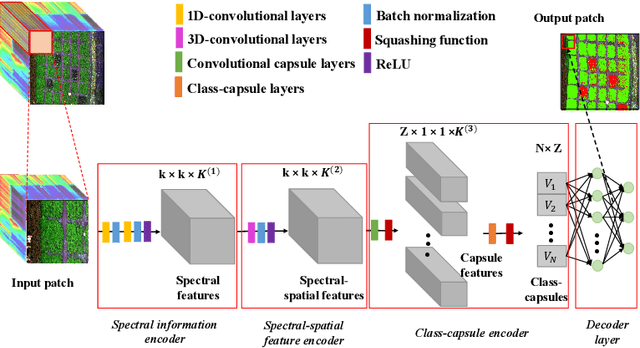
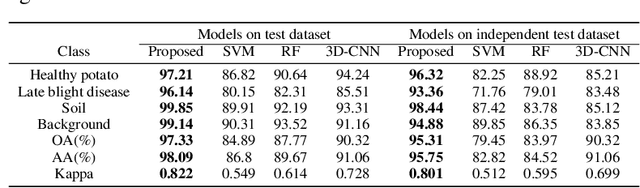
Late blight disease is one of the most destructive diseases in potato crop, leading to serious yield losses globally. Accurate diagnosis of the disease at early stage is critical for precision disease control and management. Current farm practices in crop disease diagnosis are based on manual visual inspection, which is costly, time consuming, subject to individual bias. Recent advances in imaging sensors (e.g. RGB, multiple spectral and hyperspectral cameras), remote sensing and machine learning offer the opportunity to address this challenge. Particularly, hyperspectral imagery (HSI) combining with machine learning/deep learning approaches is preferable for accurately identifying specific plant diseases because the HSI consists of a wide range of high-quality reflectance information beyond human vision, capable of capturing both spectral-spatial information. The proposed method considers the potential disease specific reflectance radiation variance caused by the canopy structural diversity, introduces the multiple capsule layers to model the hierarchical structure of the spectral-spatial disease attributes with the encapsulated features to represent the various classes and the rotation invariance of the disease attributes in the feature space. We have evaluated the proposed method with the real UAV-based HSI data under the controlled field conditions. The effectiveness of the hierarchical features has been quantitatively assessed and compared with the existing representative machine learning/deep learning methods. The experiment results show that the proposed model significantly improves the accuracy performance when considering hierarchical-structure of spectral-spatial features, comparing to the existing methods only using spectral, or spatial or spectral-spatial features without consider hierarchical-structure of spectral-spatial features.