 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Transient growth of accelerated first-order methods for strongly convex optimization problems
Mar 14, 2021
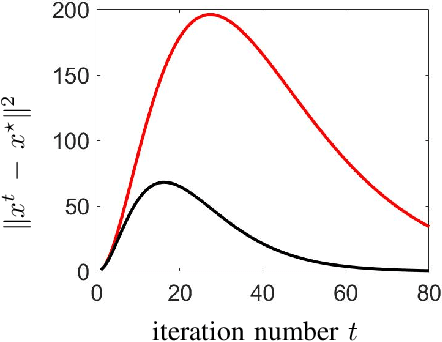
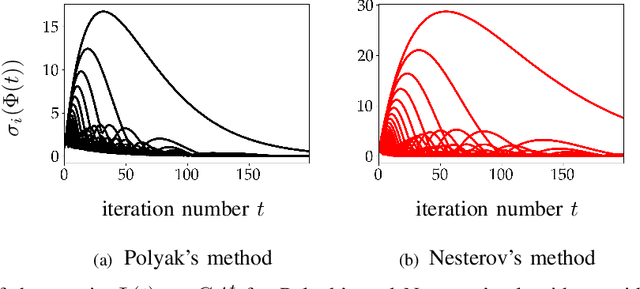
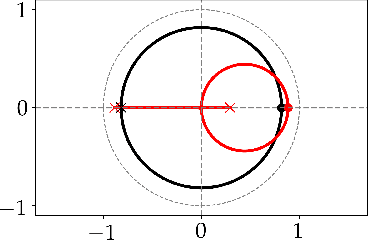
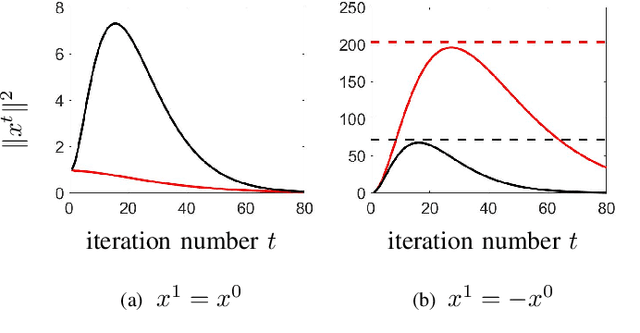
Optimization algorithms are increasingly being used in applications with limited time budgets. In many real-time and embedded scenarios, only a few iterations can be performed and traditional convergence metrics cannot be used to evaluate performance in these non-asymptotic regimes. In this paper, we examine the transient behavior of accelerated first-order optimization algorithms. For quadratic optimization problems, we employ tools from linear systems theory to show that transient growth arises from the presence of non-normal dynamics. We identify the existence of modes that yield an algebraic growth in early iterations and quantify the transient excursion from the optimal solution caused by these modes. For strongly convex smooth optimization problems, we utilize the theory of integral quadratic constraints to establish an upper bound on the magnitude of the transient response of Nesterov's accelerated method. We show that both the Euclidean distance between the optimization variable and the global minimizer and the rise time to the transient peak are proportional to the square root of the condition number of the problem. Finally, for problems with large condition numbers, we demonstrate tightness of the bounds that we derive up to constant factors.
Standardized Max Logits: A Simple yet Effective Approach for Identifying Unexpected Road Obstacles in Urban-Scene Segmentation
Jul 23, 2021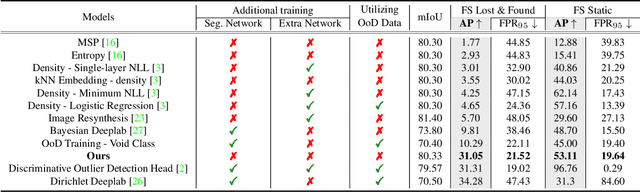
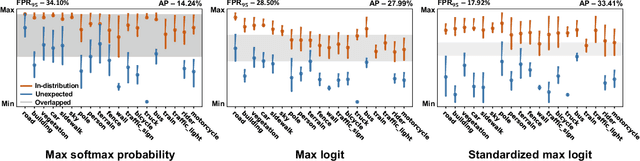


Identifying unexpected objects on roads in semantic segmentation (e.g., identifying dogs on roads) is crucial in safety-critical applications. Existing approaches use images of unexpected objects from external datasets or require additional training (e.g., retraining segmentation networks or training an extra network), which necessitate a non-trivial amount of labor intensity or lengthy inference time. One possible alternative is to use prediction scores of a pre-trained network such as the max logits (i.e., maximum values among classes before the final softmax layer) for detecting such objects. However, the distribution of max logits of each predicted class is significantly different from each other, which degrades the performance of identifying unexpected objects in urban-scene segmentation. To address this issue, we propose a simple yet effective approach that standardizes the max logits in order to align the different distributions and reflect the relative meanings of max logits within each predicted class. Moreover, we consider the local regions from two different perspectives based on the intuition that neighboring pixels share similar semantic information. In contrast to previous approaches, our method does not utilize any external datasets or require additional training, which makes our method widely applicable to existing pre-trained segmentation models. Such a straightforward approach achieves a new state-of-the-art performance on the publicly available Fishyscapes Lost & Found leaderboard with a large margin.
Fine-Grained Complexity and Algorithms for the Schulze Voting Method
Mar 05, 2021
We study computational aspects of a well-known single-winner voting rule called the Schulze method [Schulze, 2003] which is used broadly in practice. In this method the voters give (weak) ordinal preference ballots which are used to define the weighted majority graph (WMG) of direct comparisons between pairs of candidates. The choice of the winner comes from indirect comparisons in the graph, and more specifically from considering directed paths instead of direct comparisons between candidates. When the input is the WMG, to our knowledge, the fastest algorithm for computing all possible winners in the Schulze method uses a folklore reduction to the All-Pairs Bottleneck Paths (APBP) problem and runs in $O(m^{2.69})$ time, where $m$ is the number of candidates. It is an interesting open question whether this can be improved. Our first result is a combinatorial algorithm with a nearly quadratic running time for computing all possible winners. If the input to the possible winners problem is not the WMG but the preference profile, then constructing the WMG is a bottleneck that increases the running time significantly; in the special case when there are $O(m)$ voters and candidates, the running time becomes $O(m^{2.69})$, or $O(m^{2.5})$ if there is a nearly-linear time algorithm for multiplying dense square matrices. To address this bottleneck, we prove a formal equivalence between the well-studied Dominance Product problem and the problem of computing the WMG. We prove a similar connection between the so called Dominating Pairs problem and the problem of verifying whether a given candidate is a possible winner. Our paper is the first to bring fine-grained complexity into the field of computational social choice. Using it we can identify voting protocols that are unlikely to be practical for large numbers of candidates and/or voters, as their complexity is likely, say at least cubic.
Compressed Ultrasound Imaging:from Sub-Nyquist Rates to Super-Resolution
Jul 23, 2021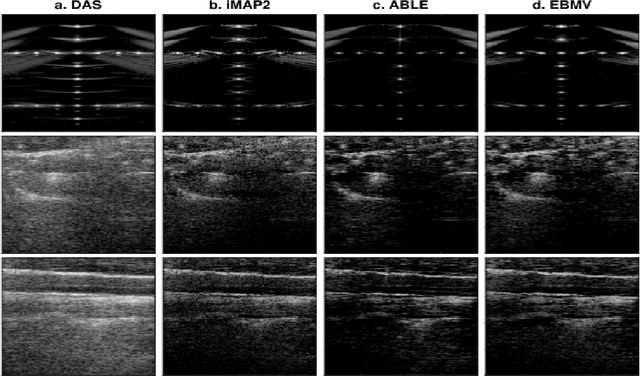
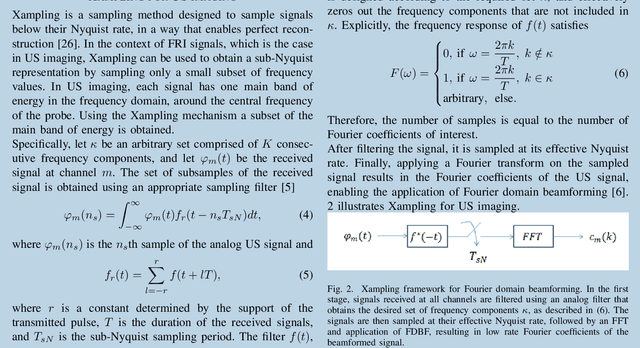
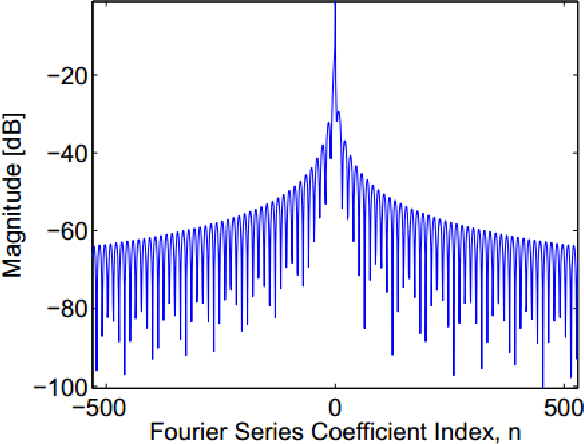
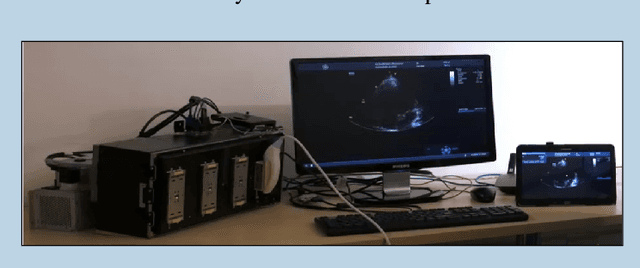
The multi-billion dollar, worldwide medical ultrasound (US) market continues to grow annually. Its non-ionizing nature, real-time capabilities and relatively low cost, compared to other imaging modalities, have led to significant applications in many different fields, including cardiology, angiology, obstetrics and emergency medicine. Facilitated by ongoing innovations, US continues to change rules and norms regarding patient screening, diagnosis and surgery. This huge and promising market is constantly driven by new imaging and processing techniques. From 3D images to sophisticated software, hardware and portability improvements, it is clear that the status of US as one of the leading medical imaging technologies is ensured for many years ahead. However, as imaging systems evolve, new engineering challenges emerge. Acquisition, transmission and processing of huge amounts of data are common for all ultrasound-based imaging modalities. Moreover, achieving higher resolution is constantly on demand, as improved diagnosis could be achieved by better visualization of organs and blood vessels deep within tissues. In this article, our goal is to motivate further interest and research in emerging processing techniques, as well as their applications in medical ultrasound, enabled by recent advancements in signal processing algorithms and deep learning. We address some of the primary challenges and potential remedies from a signal processing perspective, by exploiting the inherent structure of the received US signal.
Distributional Gradient Matching for Learning Uncertain Neural Dynamics Models
Jun 22, 2021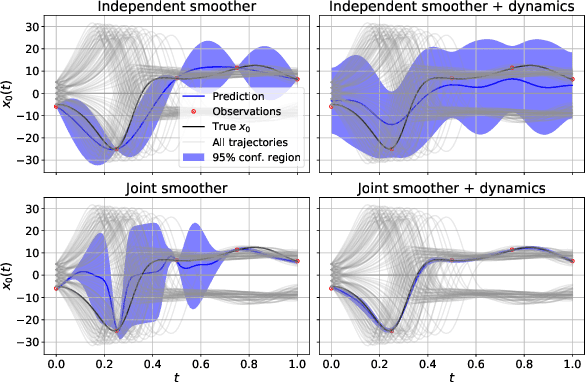

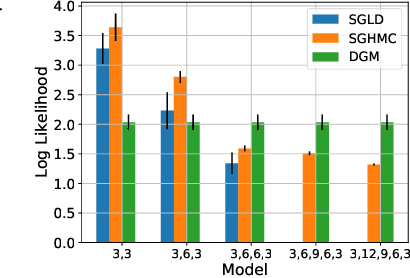
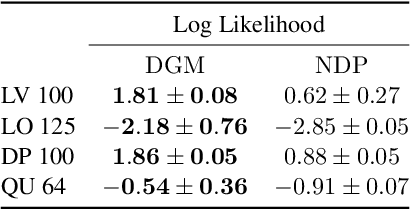
Differential equations in general and neural ODEs in particular are an essential technique in continuous-time system identification. While many deterministic learning algorithms have been designed based on numerical integration via the adjoint method, many downstream tasks such as active learning, exploration in reinforcement learning, robust control, or filtering require accurate estimates of predictive uncertainties. In this work, we propose a novel approach towards estimating epistemically uncertain neural ODEs, avoiding the numerical integration bottleneck. Instead of modeling uncertainty in the ODE parameters, we directly model uncertainties in the state space. Our algorithm - distributional gradient matching (DGM) - jointly trains a smoother and a dynamics model and matches their gradients via minimizing a Wasserstein loss. Our experiments show that, compared to traditional approximate inference methods based on numerical integration, our approach is faster to train, faster at predicting previously unseen trajectories, and in the context of neural ODEs, significantly more accurate.
Federated Graph Classification over Non-IID Graphs
Jul 23, 2021
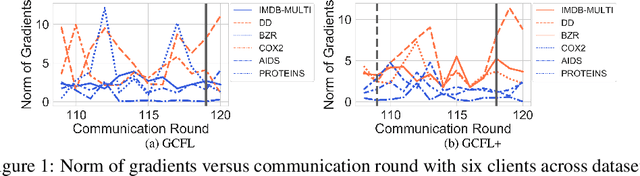

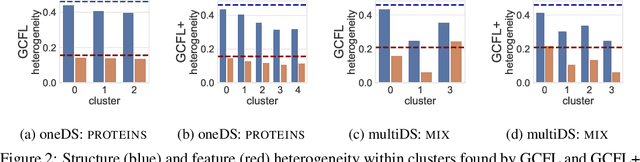
Federated learning has emerged as an important paradigm for training machine learning models in different domains. For graph-level tasks such as graph classification, graphs can also be regarded as a special type of data samples, which can be collected and stored in separate local systems. Similar to other domains, multiple local systems, each holding a small set of graphs, may benefit from collaboratively training a powerful graph mining model, such as the popular graph neural networks (GNNs). To provide more motivation towards such endeavors, we analyze real-world graphs from different domains to confirm that they indeed share certain graph properties that are statistically significant compared with random graphs. However, we also find that different sets of graphs, even from the same domain or same dataset, are non-IID regarding both graph structures and node features. To handle this, we propose a graph clustered federated learning (GCFL) framework that dynamically finds clusters of local systems based on the gradients of GNNs, and theoretically justify that such clusters can reduce the structure and feature heterogeneity among graphs owned by the local systems. Moreover, we observe the gradients of GNNs to be rather fluctuating in GCFL which impedes high-quality clustering, and design a gradient sequence-based clustering mechanism based on dynamic time warping (GCFL+). Extensive experimental results and in-depth analysis demonstrate the effectiveness of our proposed frameworks.
Hierarchical Policies for Cluttered-Scene Grasping with Latent Plans
Jul 04, 2021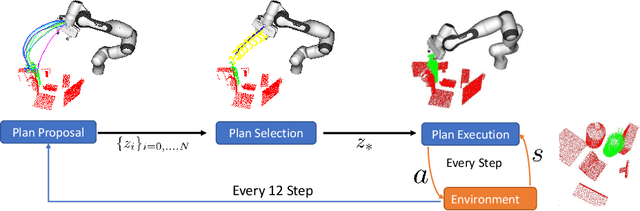

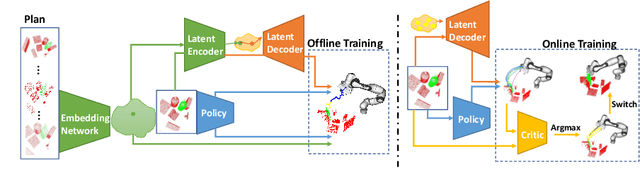
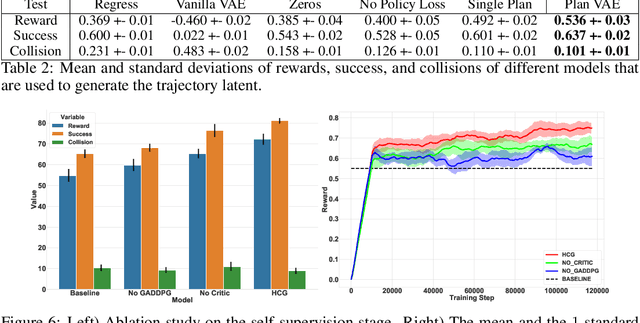
6D grasping in cluttered scenes is a longstanding robotic manipulation problem. Open-loop manipulation pipelines can fail due to modularity and error sensitivity while most end-to-end grasping policies with raw perception inputs have not yet scaled to complex scenes with obstacles. In this work, we propose a new method to close the gap through sampling and selecting plans in the latent space. Our hierarchical framework learns collision-free target-driven grasping based on partial point cloud observations. Our method learns an embedding space to represent expert grasping plans and a variational autoencoder to sample diverse latent plans at inference time. Furthermore, we train a latent plan critic for plan selection and an option classifier for switching to an instance grasping policy through hierarchical reinforcement learning. We evaluate and analyze our method and compare against several baselines in simulation, and demonstrate that the latent planning can generalize to the real-world cluttered-scene grasping task. Our videos and code can be found at https://sites.google.com/view/latent-grasping .
Detecting Anomalous Event Sequences with Temporal Point Processes
Jun 08, 2021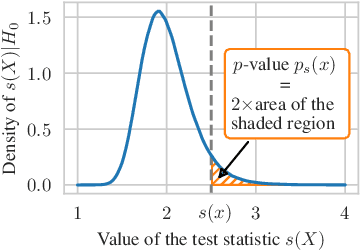
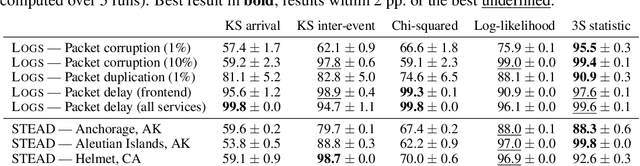
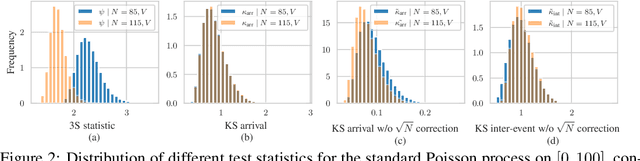
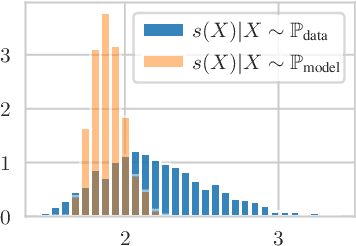
Automatically detecting anomalies in event data can provide substantial value in domains such as healthcare, DevOps, and information security. In this paper, we frame the problem of detecting anomalous continuous-time event sequences as out-of-distribution (OoD) detection for temporal point processes (TPPs). First, we show how this problem can be approached using goodness-of-fit (GoF) tests. We then demonstrate the limitations of popular GoF statistics for TPPs and propose a new test that addresses these shortcomings. The proposed method can be combined with various TPP models, such as neural TPPs, and is easy to implement. In our experiments, we show that the proposed statistic excels at both traditional GoF testing, as well as at detecting anomalies in simulated and real-world data.
Towards a Model for LSH
May 11, 2021
As data volumes continue to grow, clustering and outlier detection algorithms are becoming increasingly time-consuming. Classical index structures for neighbor search are no longer sustainable due to the "curse of dimensionality". Instead, approximated index structures offer a good opportunity to significantly accelerate the neighbor search for clustering and outlier detection and to have the lowest possible error rate in the results of the algorithms. Locality-sensitive hashing is one of those. We indicate directions to model the properties of LSH.
XNect: Real-time Multi-person 3D Human Pose Estimation with a Single RGB Camera
Jul 01, 2019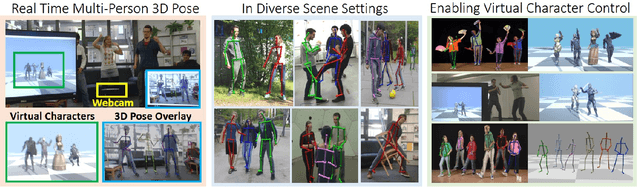
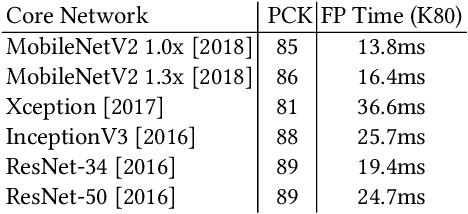
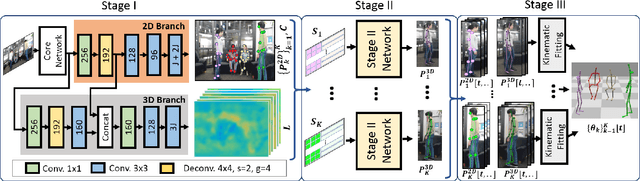
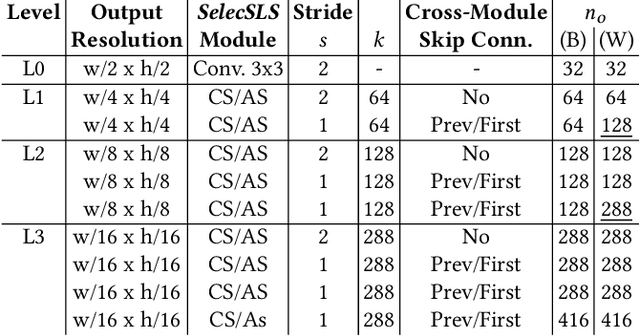
We present a real-time approach for multi-person 3D motion capture at over 30 fps using a single RGB camera. It operates in generic scenes and is robust to difficult occlusions both by other people and objects. Our method operates in subsequent stages. The first stage is a convolutional neural network (CNN) that estimates 2D and 3D pose features along with identity assignments for all visible joints of all individuals. We contribute a new architecture for this CNN, called SelecSLS Net, that uses novel selective long and short range skip connections to improve the information flow allowing for a drastically faster network without compromising accuracy. In the second stage, a fully-connected neural network turns the possibly partial (on account of occlusion) 2D pose and 3D pose features for each subject into a complete 3D pose estimate per individual. The third stage applies space-time skeletal model fitting to the predicted 2D and 3D pose per subject to further reconcile the 2D and 3D pose, and enforce temporal coherence. Our method returns the full skeletal pose in joint angles for each subject. This is a further key distinction from previous work that neither extracted global body positions nor joint angle results of a coherent skeleton in real time for multi-person scenes. The proposed system runs on consumer hardware at a previously unseen speed of more than 30 fps given 512x320 images as input while achieving state-of-the-art accuracy, which we will demonstrate on a range of challenging real-world scenes.