 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
ST-PCNN: Spatio-Temporal Physics-Coupled Neural Networks for Dynamics Forecasting
Aug 12, 2021
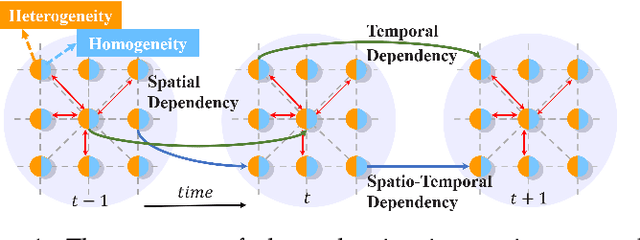
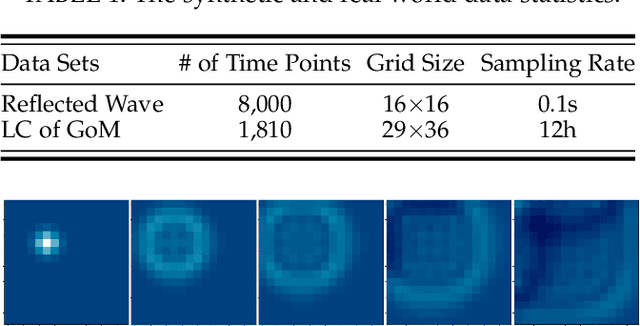
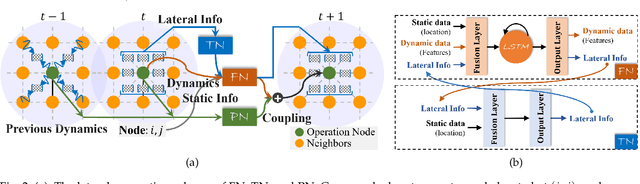
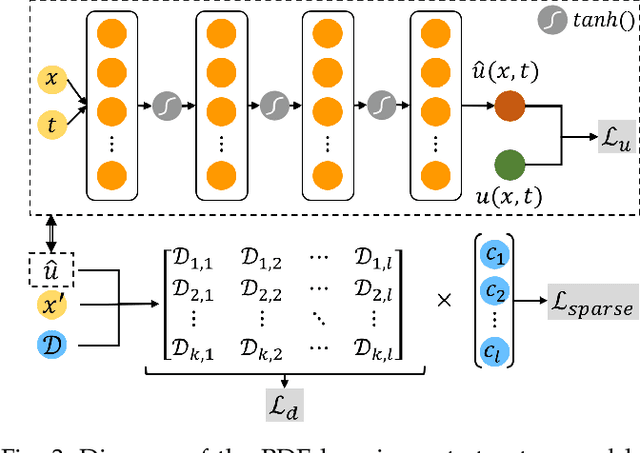
Ocean current, fluid mechanics, and many other spatio-temporal physical dynamical systems are essential components of the universe. One key characteristic of such systems is that certain physics laws -- represented as ordinary/partial differential equations (ODEs/PDEs) -- largely dominate the whole process, irrespective of time or location. Physics-informed learning has recently emerged to learn physics for accurate prediction, but they often lack a mechanism to leverage localized spatial and temporal correlation or rely on hard-coded physics parameters. In this paper, we advocate a physics-coupled neural network model to learn parameters governing the physics of the system, and further couple the learned physics to assist the learning of recurring dynamics. A spatio-temporal physics-coupled neural network (ST-PCNN) model is proposed to achieve three goals: (1) learning the underlying physics parameters, (2) transition of local information between spatio-temporal regions, and (3) forecasting future values for the dynamical system. The physics-coupled learning ensures that the proposed model can be tremendously improved by using learned physics parameters, and can achieve good long-range forecasting (e.g., more than 30-steps). Experiments, using simulated and field-collected ocean current data, validate that ST-PCNN outperforms existing physics-informed models.
Design of Distributed Reconfigurable Robotics Systems with ReconROS
Jul 15, 2021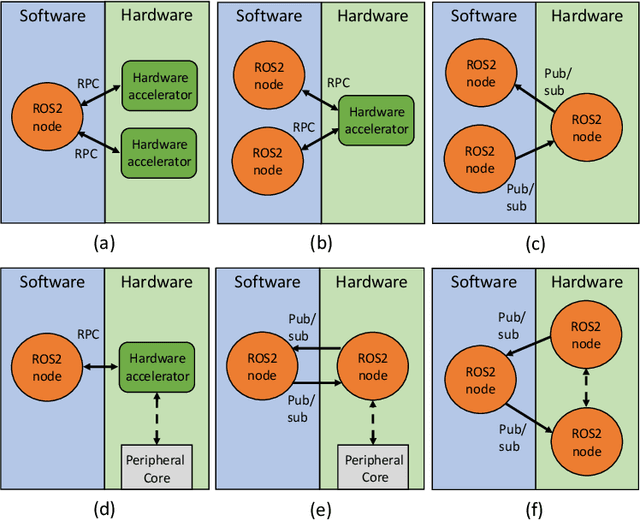
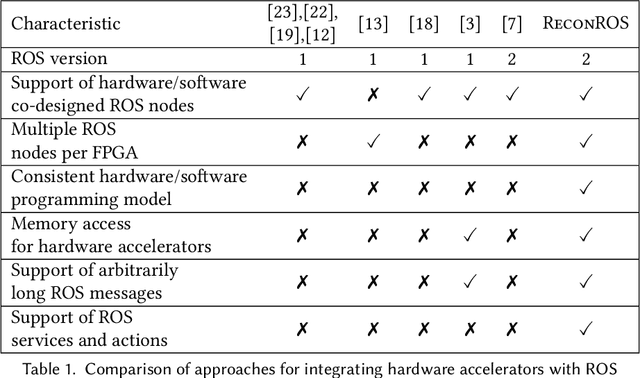
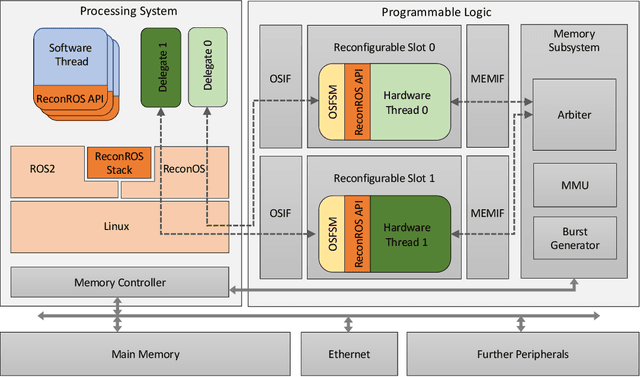
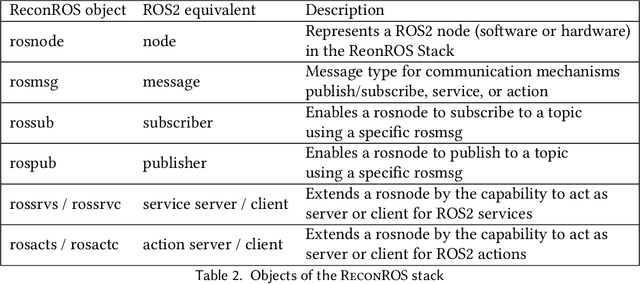
Robotics applications process large amounts of data in real-time and require compute platforms that provide high performance and energy-efficiency. FPGAs are well-suited for many of these applications, but there is a reluctance in the robotics community to use hardware acceleration due to increased design complexity and a lack of consistent programming models across the software/hardware boundary. In this paper we present ReconROS, a framework that integrates the widely-used robot operating system (ROS) with ReconOS, which features multithreaded programming of hardware and software threads for reconfigurable computers. This unique combination gives ROS2 developers the flexibility to transparently accelerate parts of their robotics applications in hardware. We elaborate on the architecture and the design flow for ReconROS and report on a set of experiments that underline the feasibility and flexibility of our approach.
Explaining Outcomes of Multi-Party Dialogues using Causal Learning
May 03, 2021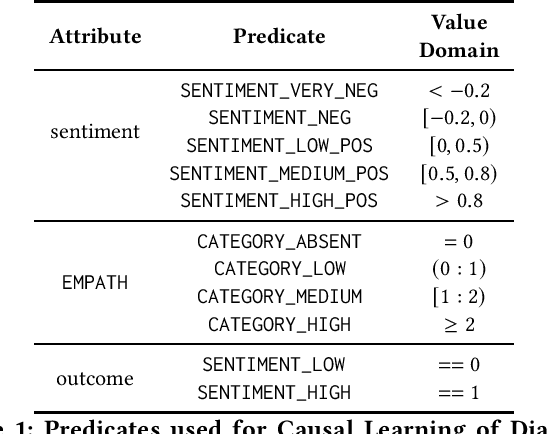

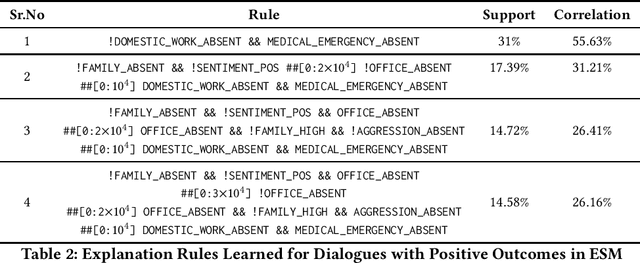
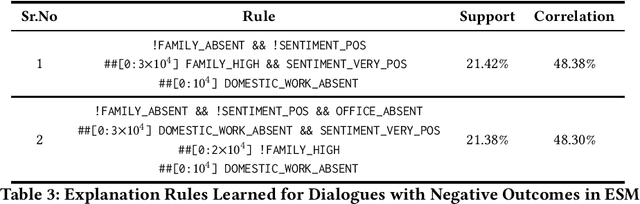
Multi-party dialogues are common in enterprise social media on technical as well as non-technical topics. The outcome of a conversation may be positive or negative. It is important to analyze why a dialogue ends with a particular sentiment from the point of view of conflict analysis as well as future collaboration design. We propose an explainable time series mining algorithm for such analysis. A dialogue is represented as an attributed time series of occurrences of keywords, EMPATH categories, and inferred sentiments at various points in its progress. A special decision tree, with decision metrics that take into account temporal relationships between dialogue events, is used for predicting the cause of the outcome sentiment. Interpretable rules mined from the classifier are used to explain the prediction. Experimental results are presented for the enterprise social media posts in a large company.
Page-level Optimization of e-Commerce Item Recommendations
Aug 12, 2021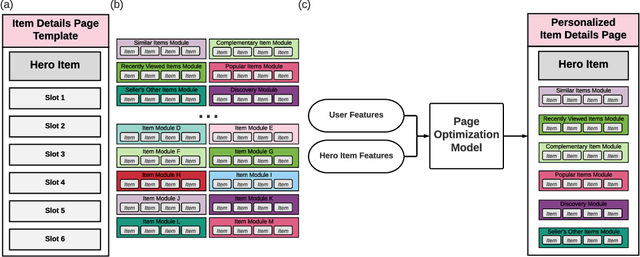
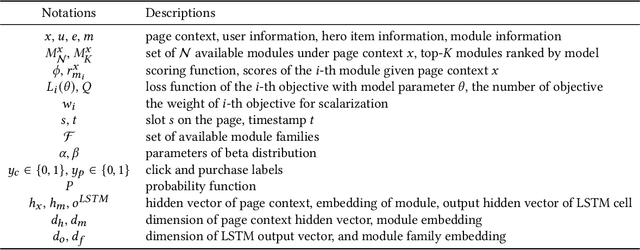
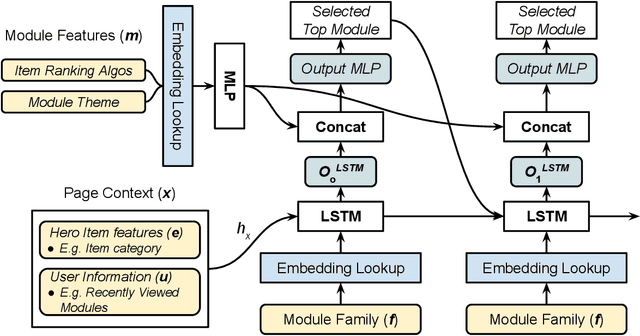

The item details page (IDP) is a web page on an e-commerce website that provides information on a specific product or item listing. Just below the details of the item on this page, the buyer can usually find recommendations for other relevant items. These are typically in the form of a series of modules or carousels, with each module containing a set of recommended items. The selection and ordering of these item recommendation modules are intended to increase discover-ability of relevant items and encourage greater user engagement, while simultaneously showcasing diversity of inventory and satisfying other business objectives. Item recommendation modules on the IDP are often curated and statically configured for all customers, ignoring opportunities for personalization. In this paper, we present a scalable end-to-end production system to optimize the personalized selection and ordering of item recommendation modules on the IDP in real-time by utilizing deep neural networks. Through extensive offline experimentation and online A/B testing, we show that our proposed system achieves significantly higher click-through and conversion rates compared to other existing methods. In our online A/B test, our framework improved click-through rate by 2.48% and purchase-through rate by 7.34% over a static configuration.
Cardiac CT segmentation based on distance regularized level set
Jul 23, 2021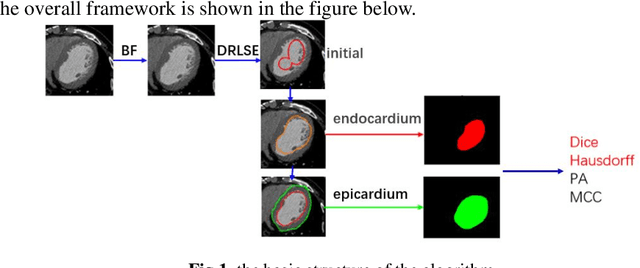
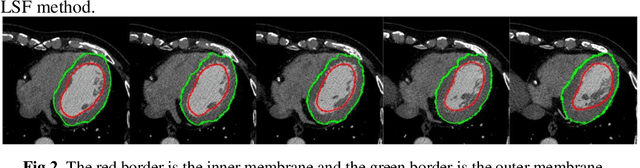


Before analy z ing the CT image, it is very important to segment the heart image, and the left ve ntricular (LV) inner and outer membrane segmentation is one of the most important contents. However, manual segmentation is tedious and time consuming. In order to facilitate doctors to focus on high tech tasks such as disease analysis and diagnosis, it is crucial to develop a fast and accurate segmentation method [1]. In view of this phenomenon, this paper uses distance regularized level set (DRL SE) to explore the segmentation effect of epicardium and endocardium 2 ]], which includes a distance regula riz ed t erm and an external energy term. Finally, five CT images are used to verify the proposed method, and image quality evaluation indexes such as dice score and Hausdorff distance are used to evaluate the segmentation effect. The results showed that the me tho d could separate the inner and outer membrane very well (endocardium dice = 0.9253, Hausdorff = 7.8740; epicardium Hausdorff = 0.9687, Hausdorff = 6 .
MobileCharger: an Autonomous Mobile Robot with Inverted Delta Actuator for Robust and Safe Robot Charging
Jul 23, 2021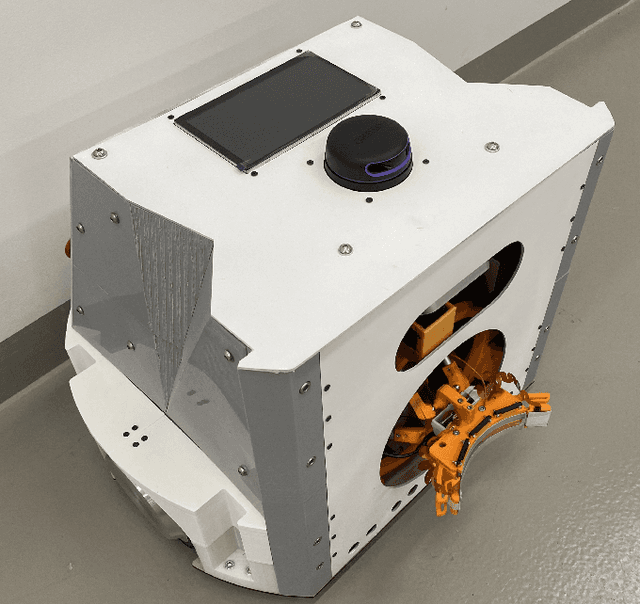
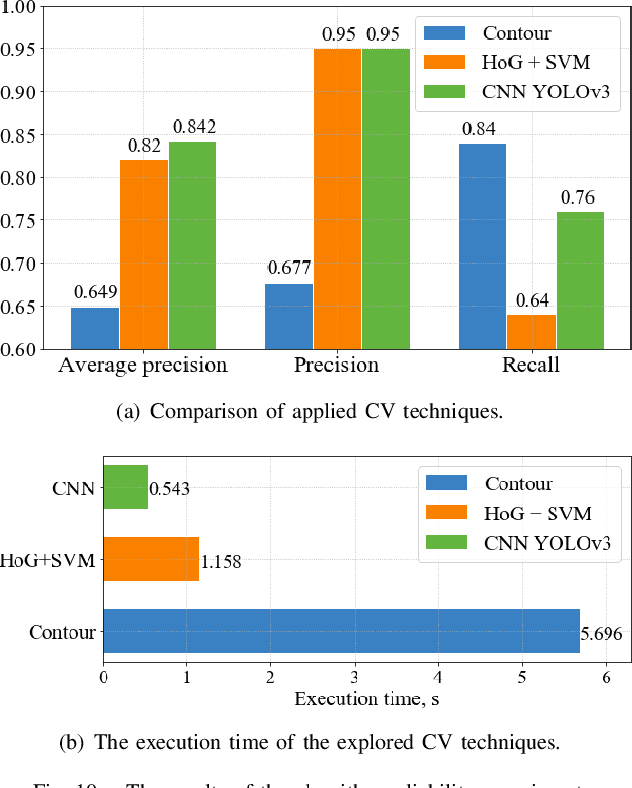
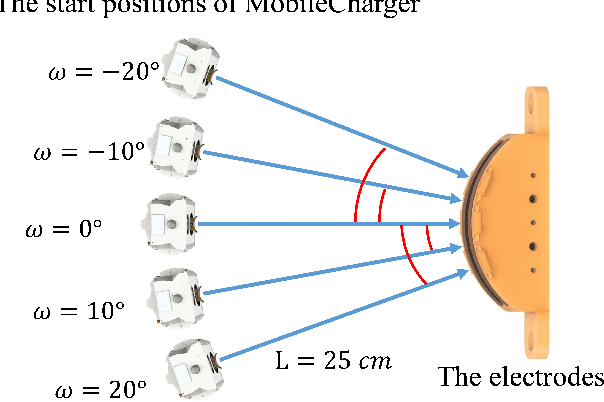
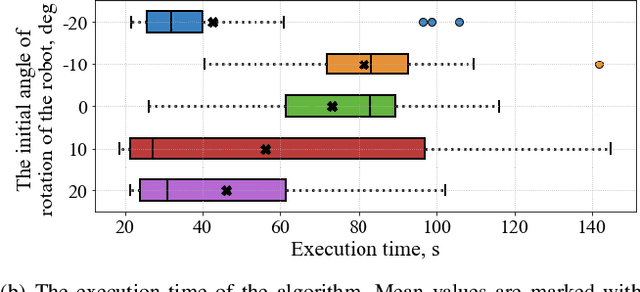
MobileCharger is a novel mobile charging robot with an Inverted Delta actuator for safe and robust energy transfer between two mobile robots. The RGB-D camera-based computer vision system allows to detect the electrodes on the target mobile robot using a convolutional neural network (CNN). The embedded high-fidelity tactile sensors are applied to estimate the misalignment between the electrodes on the charger mechanism and the electrodes on the main robot using CNN based on pressure data on the contact surfaces. Thus, the developed vision-tactile perception system allows precise positioning of the end effector of the actuator and ensures a reliable connection between the electrodes of the two robots. The experimental results showed high average precision (84.2%) for electrode detection using CNN. The percentage of successful trials of the CNN-based electrode search algorithm reached 83% and the average execution time accounted for 60 s. MobileCharger could introduce a new level of charging systems and increase the prevalence of autonomous mobile robots.
Principal Component Density Estimation for Scenario Generation Using Normalizing Flows
Apr 21, 2021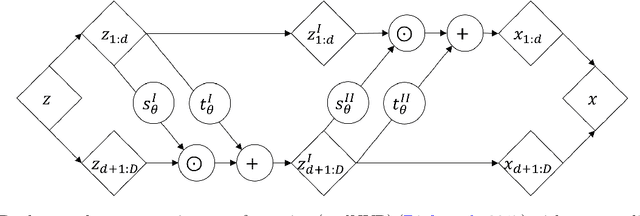
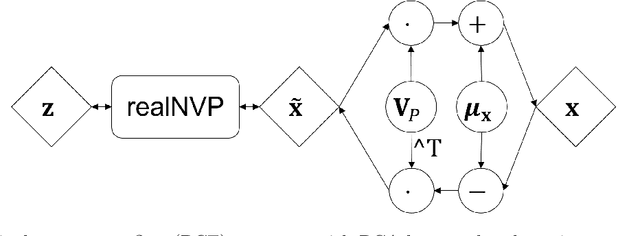
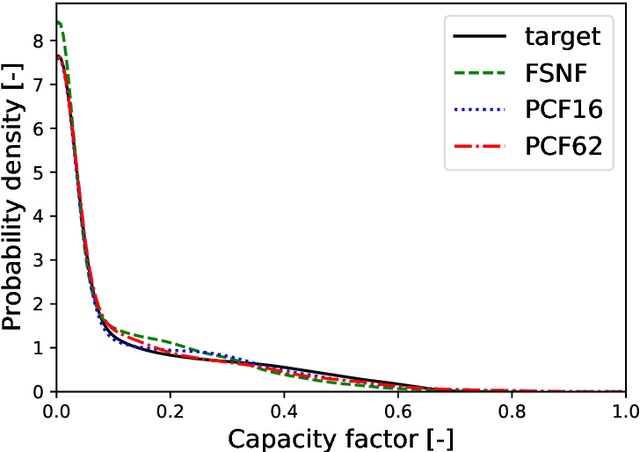
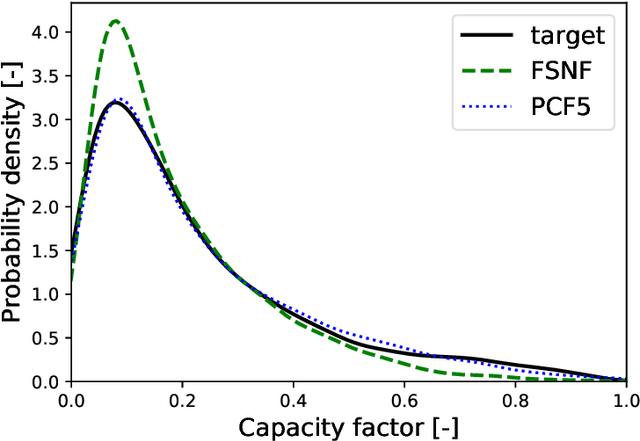
Neural networks-based learning of the distribution of non-dispatchable renewable electricity generation from sources such as photovoltaics (PV) and wind as well as load demands has recently gained attention. Normalizing flow density models have performed particularly well in this task due to the training through direct log-likelihood maximization. However, research from the field of image generation has shown that standard normalizing flows can only learn smeared-out versions of manifold distributions and can result in the generation of noisy data. To avoid the generation of time series data with unrealistic noise, we propose a dimensionality-reducing flow layer based on the linear principal component analysis (PCA) that sets up the normalizing flow in a lower-dimensional space. We train the resulting principal component flow (PCF) on data of PV and wind power generation as well as load demand in Germany in the years 2013 to 2015. The results of this investigation show that the PCF preserves critical features of the original distributions, such as the probability density and frequency behavior of the time series. The application of the PCF is, however, not limited to renewable power generation but rather extends to any data set, time series, or otherwise, which can be efficiently reduced using PCA.
MLDemon: Deployment Monitoring for Machine Learning Systems
Apr 29, 2021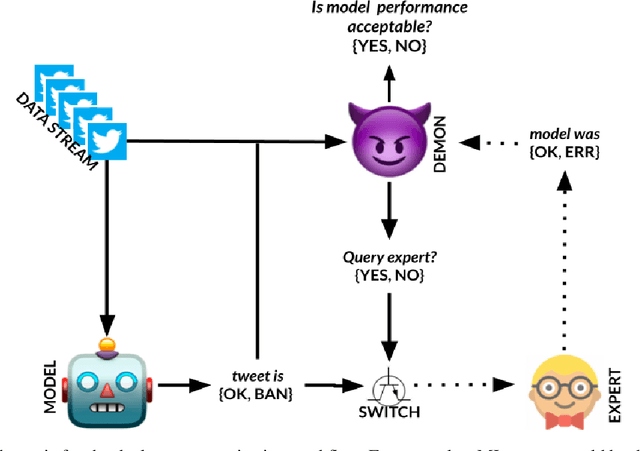
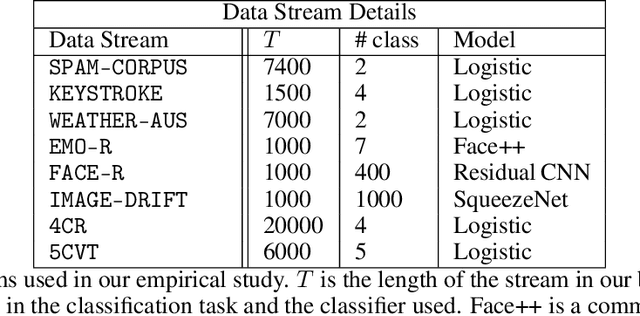
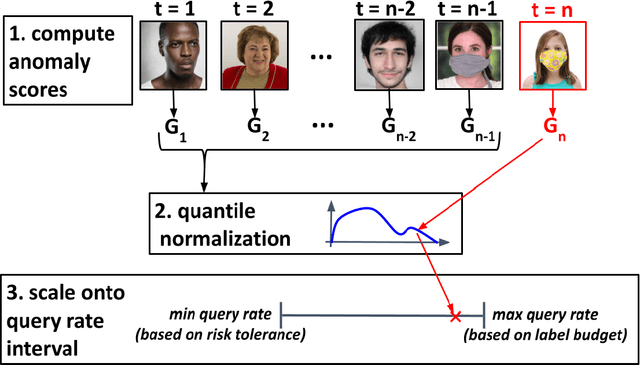
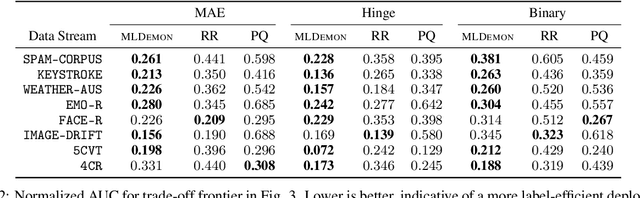
Post-deployment monitoring of the performance of ML systems is critical for ensuring reliability, especially as new user inputs can differ from the training distribution. Here we propose a novel approach, MLDemon, for ML DEployment MONitoring. MLDemon integrates both unlabeled features and a small amount of on-demand labeled examples over time to produce a real-time estimate of the ML model's current performance on a given data stream. Subject to budget constraints, MLDemon decides when to acquire additional, potentially costly, supervised labels to verify the model. On temporal datasets with diverse distribution drifts and models, MLDemon substantially outperforms existing monitoring approaches. Moreover, we provide theoretical analysis to show that MLDemon is minimax rate optimal up to logarithmic factors and is provably robust against broad distribution drifts whereas prior approaches are not.
Incremental Few-Shot Instance Segmentation
May 11, 2021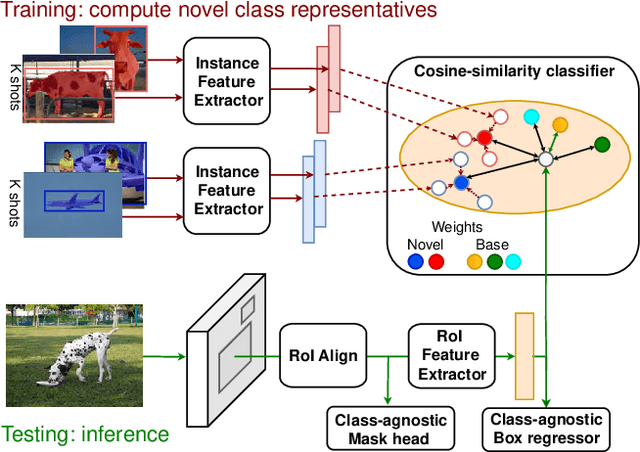
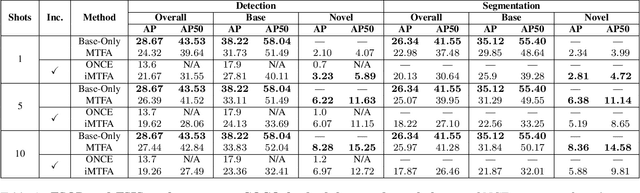
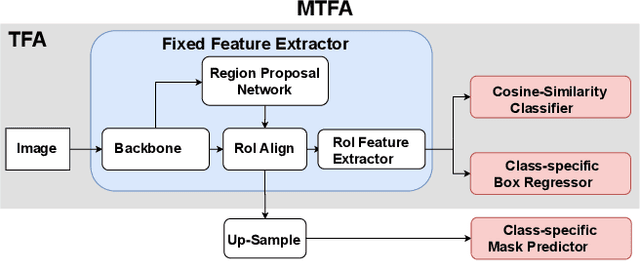
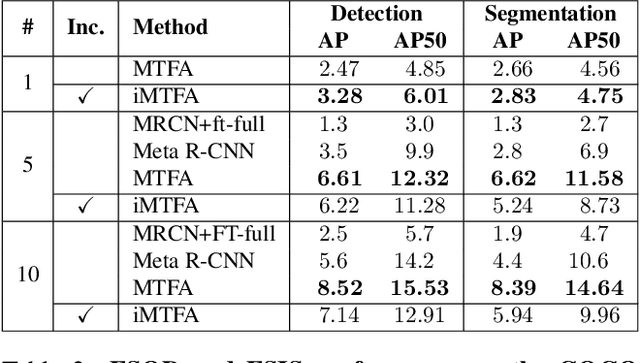
Few-shot instance segmentation methods are promising when labeled training data for novel classes is scarce. However, current approaches do not facilitate flexible addition of novel classes. They also require that examples of each class are provided at train and test time, which is memory intensive. In this paper, we address these limitations by presenting the first incremental approach to few-shot instance segmentation: iMTFA. We learn discriminative embeddings for object instances that are merged into class representatives. Storing embedding vectors rather than images effectively solves the memory overhead problem. We match these class embeddings at the RoI-level using cosine similarity. This allows us to add new classes without the need for further training or access to previous training data. In a series of experiments, we consistently outperform the current state-of-the-art. Moreover, the reduced memory requirements allow us to evaluate, for the first time, few-shot instance segmentation performance on all classes in COCO jointly.
Learning future terrorist targets through temporal meta-graphs
Apr 21, 2021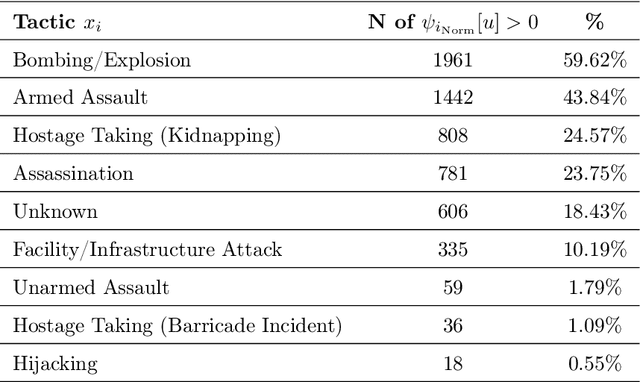
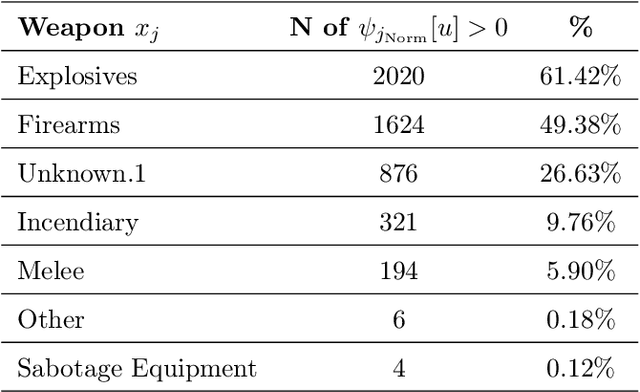
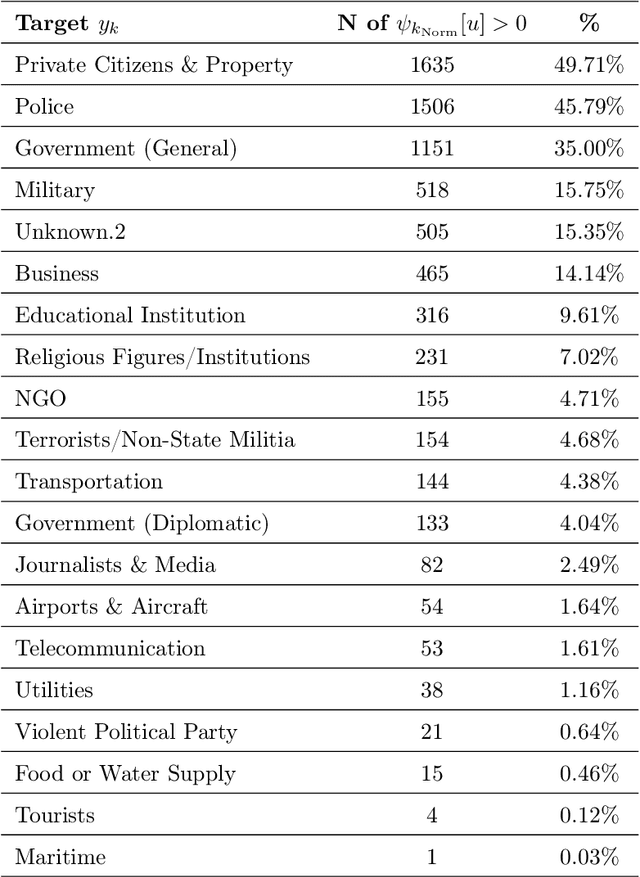
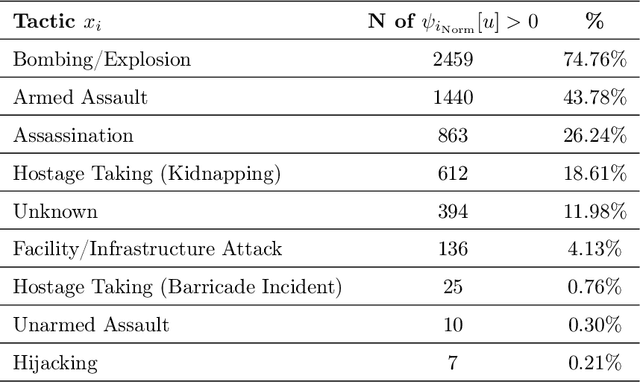
In the last 20 years, terrorism has led to hundreds of thousands of deaths and massive economic, political, and humanitarian crises in several regions of the world. Using real-world data on attacks occurred in Afghanistan and Iraq from 2001 to 2018, we propose the use of temporal meta-graphs and deep learning to forecast future terrorist targets. Focusing on three event dimensions, i.e., employed weapons, deployed tactics and chosen targets, meta-graphs map the connections among temporally close attacks, capturing their operational similarities and dependencies. From these temporal meta-graphs, we derive 2-day-based time series that measure the centrality of each feature within each dimension over time. Formulating the problem in the context of the strategic behavior of terrorist actors, these multivariate temporal sequences are then utilized to learn what target types are at the highest risk of being chosen. The paper makes two contributions. First, it demonstrates that engineering the feature space via temporal meta-graphs produces richer knowledge than shallow time-series that only rely on frequency of feature occurrences. Second, the performed experiments reveal that bi-directional LSTM networks achieve superior forecasting performance compared to other algorithms, calling for future research aiming at fully discovering the potential of artificial intelligence to counter terrorist violence.
* 19 pages, 18 figures