 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Zero-Cost Proxies Meet Differentiable Architecture Search
Jun 12, 2021
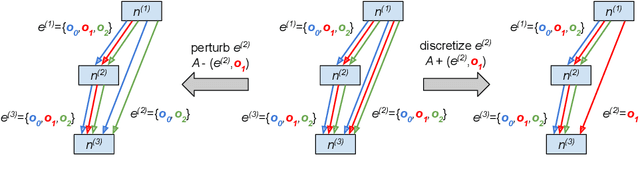

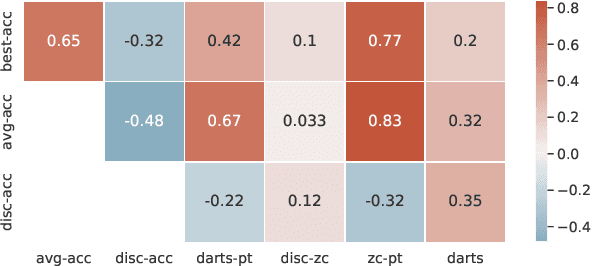
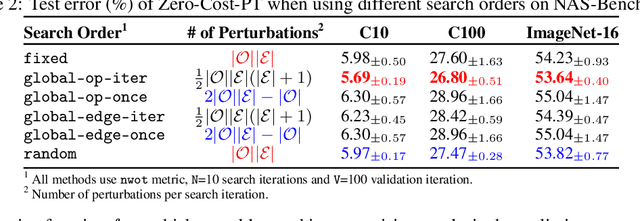
Differentiable neural architecture search (NAS) has attracted significant attention in recent years due to its ability to quickly discover promising architectures of deep neural networks even in very large search spaces. Despite its success, DARTS lacks robustness in certain cases, e.g. it may degenerate to trivial architectures with excessive parametric-free operations such as skip connection or random noise, leading to inferior performance. In particular, operation selection based on the magnitude of architectural parameters was recently proven to be fundamentally wrong showcasing the need to rethink this aspect. On the other hand, zero-cost proxies have been recently studied in the context of sample-based NAS showing promising results -- speeding up the search process drastically in some cases but also failing on some of the large search spaces typical for differentiable NAS. In this work we propose a novel operation selection paradigm in the context of differentiable NAS which utilises zero-cost proxies. Our perturbation-based zero-cost operation selection (Zero-Cost-PT) improves searching time and, in many cases, accuracy compared to the best available differentiable architecture search, regardless of the search space size. Specifically, we are able to find comparable architectures to DARTS-PT on the DARTS CNN search space while being over 40x faster (total searching time 25 minutes on a single GPU).
Planetary UAV localization based on Multi-modal Registration with Pre-existing Digital Terrain Model
Jun 24, 2021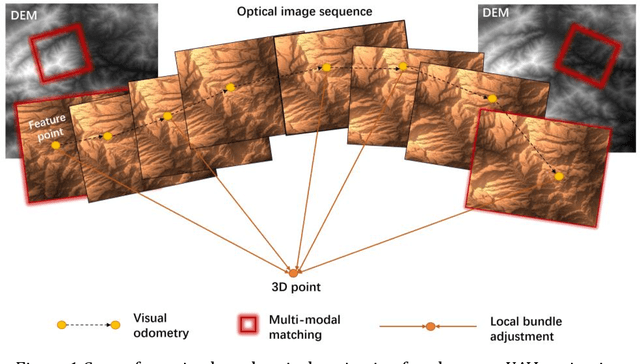
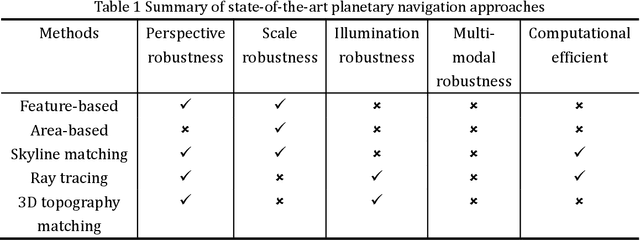


The autonomous real-time optical navigation of planetary UAV is of the key technologies to ensure the success of the exploration. In such a GPS denied environment, vision-based localization is an optimal approach. In this paper, we proposed a multi-modal registration based SLAM algorithm, which estimates the location of a planet UAV using a nadir view camera on the UAV compared with pre-existing digital terrain model. To overcome the scale and appearance difference between on-board UAV images and pre-installed digital terrain model, a theoretical model is proposed to prove that topographic features of UAV image and DEM can be correlated in frequency domain via cross power spectrum. To provide the six-DOF of the UAV, we also developed an optimization approach which fuses the geo-referencing result into a SLAM system via LBA (Local Bundle Adjustment) to achieve robust and accurate vision-based navigation even in featureless planetary areas. To test the robustness and effectiveness of the proposed localization algorithm, a new cross-source drone-based localization dataset for planetary exploration is proposed. The proposed dataset includes 40200 synthetic drone images taken from nine planetary scenes with related DEM query images. Comparison experiments carried out demonstrate that over the flight distance of 33.8km, the proposed method achieved average localization error of 0.45 meters, compared to 1.31 meters by ORB-SLAM, with the processing speed of 12hz which will ensure a real-time performance. We will make our datasets available to encourage further work on this promising topic.
Learning off-road maneuver plans for autonomous vehicles
Aug 02, 2021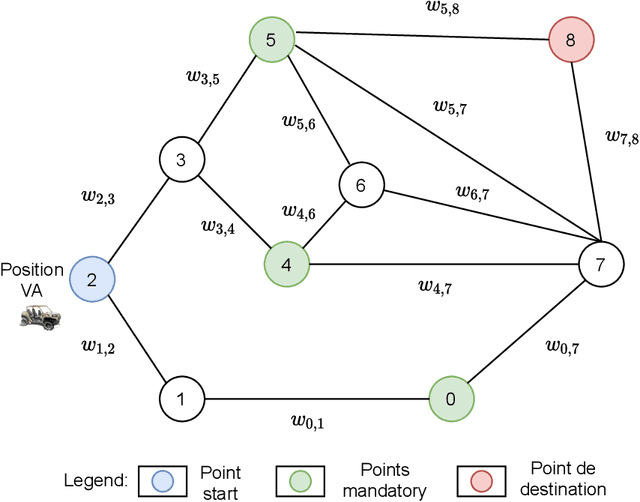
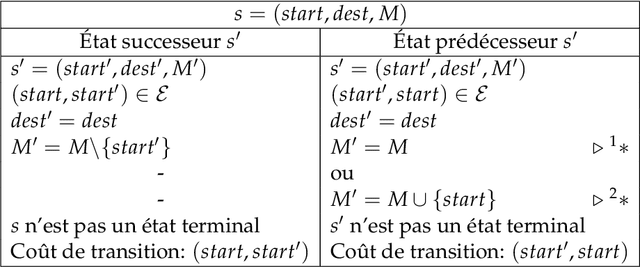

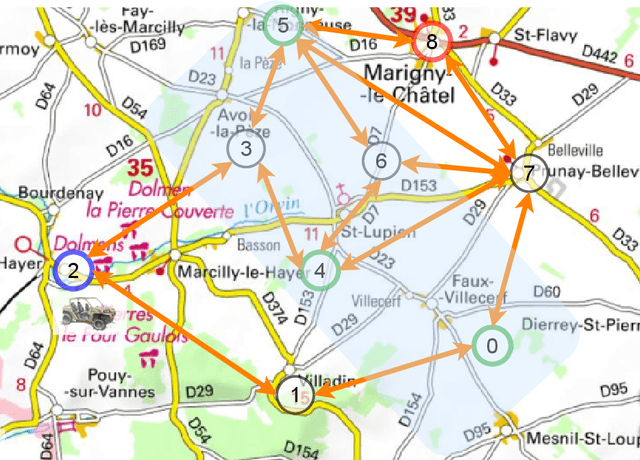
This thesis explores the benefits machine learning algorithms can bring to online planning and scheduling for autonomous vehicles in off-road situations. Mainly, we focus on typical problems of interest which include computing itineraries that meet certain objectives, as well as computing scheduling strategies to execute synchronized maneuvers with other vehicles. We present a range of learning-based heuristics to assist different itinerary planners. We show that these heuristics allow a significant increase in performance for optimal planners. Furthermore, in the case of approximate planning, we show that not only does the running time decrease, the quality of the itinerary found also becomes almost always better. Finally, in order to synthesize strategies to execute synchronized maneuvers, we propose a novel type of scheduling controllability and a learning-assisted algorithm. The proposed framework achieves significant improvement on known benchmarks in this controllability type over the performance of state-of-the-art works in a related controllability type. Moreover, it is able to find strategies on complex scheduling problems for which previous works fail to do so.
Digitize-PID: Automatic Digitization of Piping and Instrumentation Diagrams
Sep 08, 2021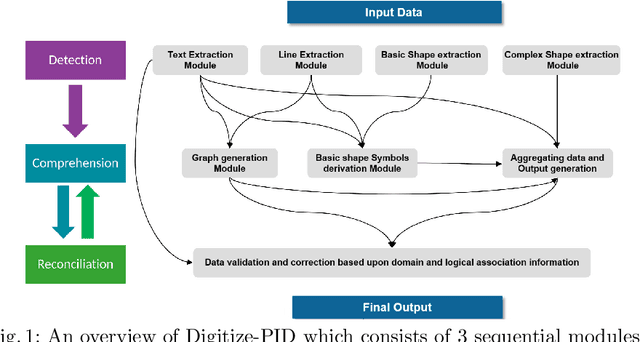
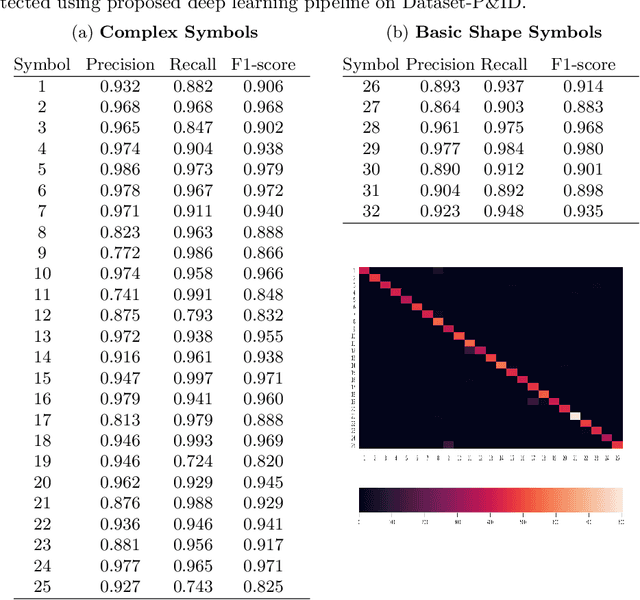
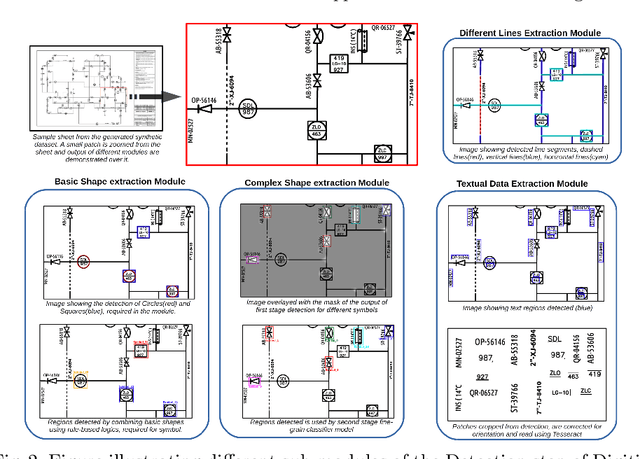
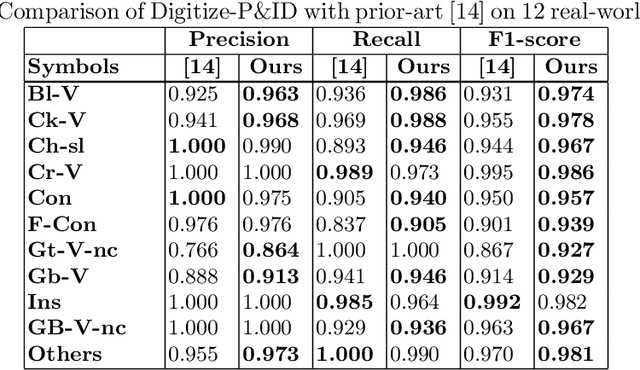
Digitization of scanned Piping and Instrumentation diagrams(P&ID), widely used in manufacturing or mechanical industries such as oil and gas over several decades, has become a critical bottleneck in dynamic inventory management and creation of smart P&IDs that are compatible with the latest CAD tools. Historically, P&ID sheets have been manually generated at the design stage, before being scanned and stored as PDFs. Current digitization initiatives involve manual processing and are consequently very time consuming, labour intensive and error-prone.Thanks to advances in image processing, machine and deep learning techniques there are emerging works on P&ID digitization. However, existing solutions face several challenges owing to the variation in the scale, size and noise in the P&IDs, sheer complexity and crowdedness within drawings, domain knowledge required to interpret the drawings. This motivates our current solution called Digitize-PID which comprises of an end-to-end pipeline for detection of core components from P&IDs like pipes, symbols and textual information, followed by their association with each other and eventually, the validation and correction of output data based on inherent domain knowledge. A novel and efficient kernel-based line detection and a two-step method for detection of complex symbols based on a fine-grained deep recognition technique is presented in the paper. In addition, we have created an annotated synthetic dataset, Dataset-P&ID, of 500 P&IDs by incorporating different types of noise and complex symbols which is made available for public use (currently there exists no public P&ID dataset). We evaluate our proposed method on this synthetic dataset and a real-world anonymized private dataset of 12 P&ID sheets. Results show that Digitize-PID outperforms the existing state-of-the-art for P&ID digitization.
* 13 pages
Bayesian Over-The-Air Computation
Sep 08, 2021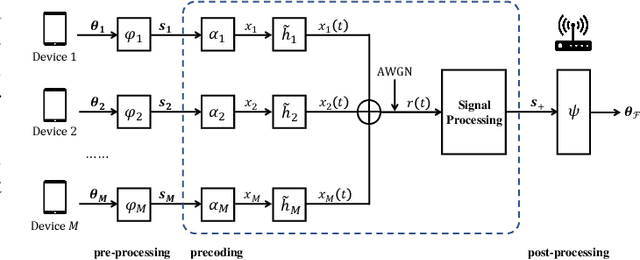
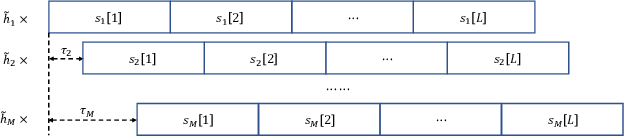
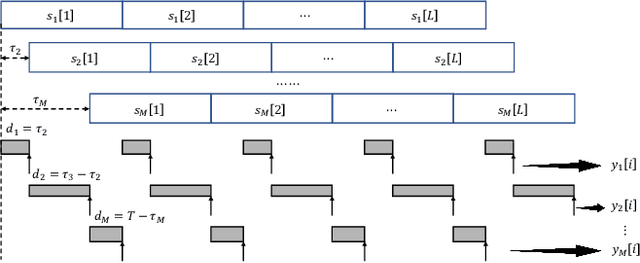
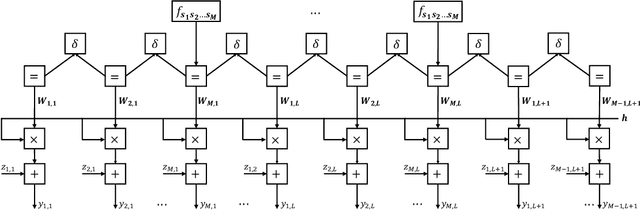
Analog over-the-air computation (OAC) is an efficient solution to a class of uplink data aggregation tasks over a multiple-access channel (MAC), wherein the receiver, dubbed the fusion center, aims to reconstruct a function of the data distributed at edge devices rather than the individual data themselves. Existing OAC relies exclusively on the maximum likelihood (ML) estimation at the fusion center to recover the arithmetic sum of the transmitted signals from different devices. ML estimation, however, is much susceptible to noise. In particular, in the misaligned OAC where there are channel misalignments among transmitted signals, ML estimation suffers from severe error propagation and noise enhancement. To address these challenges, this paper puts forth a Bayesian approach for OAC by letting each edge device transmit two pieces of prior information to the fusion center. Three OAC systems are studied: the aligned OAC with perfectly-aligned signals; the synchronous OAC with misaligned channel gains among the received signals; and the asynchronous OAC with both channel-gain and time misalignments. Using the prior information, we devise linear minimum mean squared error (LMMSE) estimators and a sum-product maximum a posteriori (SP-MAP) estimator for the three OAC systems. Numerical results verify that, 1) For the aligned and synchronous OAC, our LMMSE estimator significantly outperforms the ML estimator. In the low signal-to-noise ratio (SNR) regime, the LMMSE estimator reduces the mean squared error (MSE) by at least 6 dB; in the high SNR regime, the LMMSE estimator lowers the error floor on the MSE by 86.4%; 2) For the asynchronous OAC, our LMMSE and SP-MAP estimators are on an equal footing in terms of the MSE performance, and are significantly better than the ML estimator.
Whittle Index for A Class of Restless Bandits with Imperfect Observations
Aug 09, 2021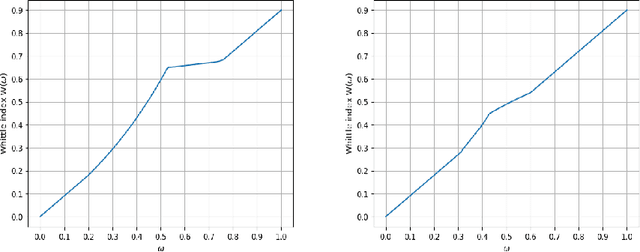
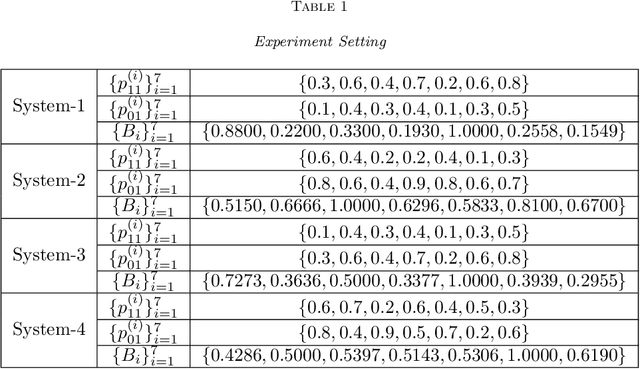
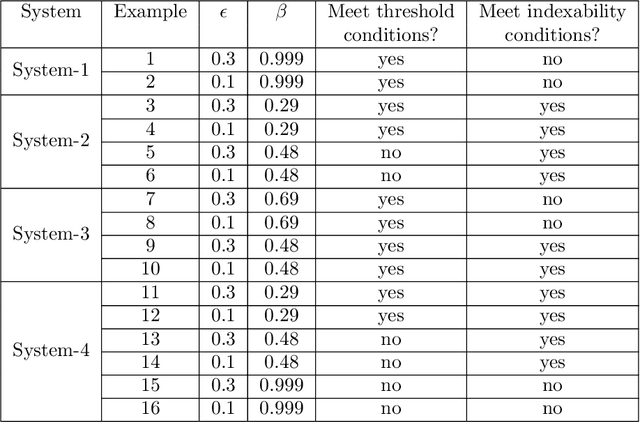
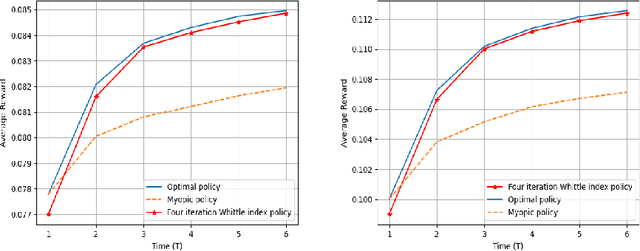
We consider a class of restless bandit problems that finds a broad application area in stochastic optimization, reinforcement learning and operations research. In our model, there are $N$ independent $2$-state Markov processes that may be observed and accessed for accruing rewards. The observation is error-prone, i.e., both false alarm and miss detection may happen. Furthermore, the user can only choose a subset of $M~(M<N)$ processes to observe at each discrete time. If a process in state~$1$ is correctly observed, then it will offer some reward. Due to the partial and imperfect observation model, the system is formulated as a restless multi-armed bandit problem with an information state space of uncountable cardinality. Restless bandit problems with finite state spaces are PSPACE-HARD in general. In this paper, we establish a low-complexity algorithm that achieves a strong performance for this class of restless bandits. Under certain conditions, we theoretically prove the existence (indexability) of Whittle index and its equivalence to our algorithm. When those conditions do not hold, we show by numerical experiments the near-optimal performance of our algorithm in general.
Splitting EUD graphs into trees: A quick and clatty approach
Jun 24, 2021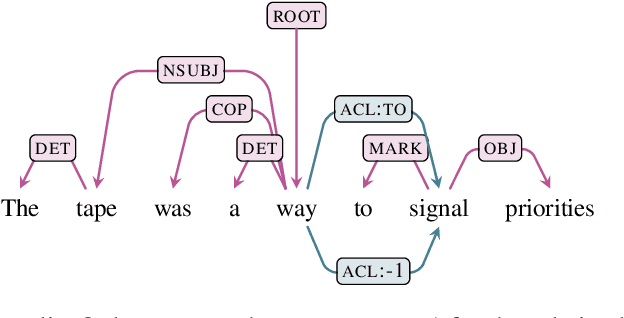
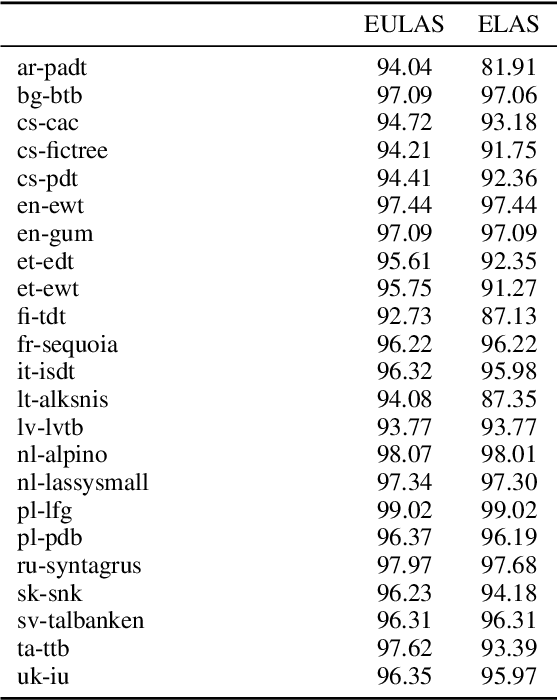
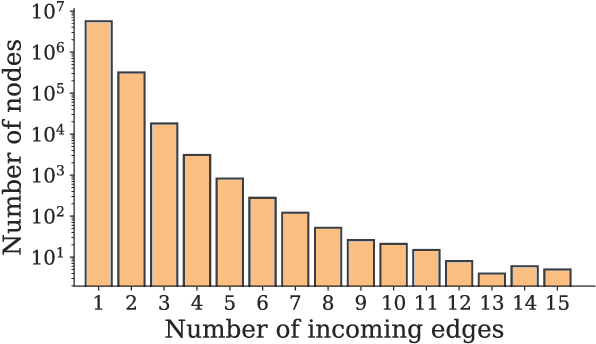
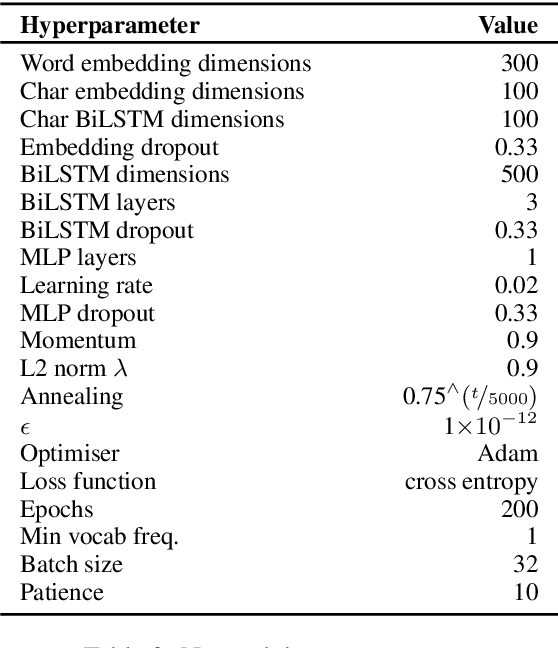
We present the system submission from the FASTPARSE team for the EUD Shared Task at IWPT 2021. We engaged in the task last year by focusing on efficiency. This year we have focused on experimenting with new ideas on a limited time budget. Our system is based on splitting the EUD graph into several trees, based on linguistic criteria. We predict these trees using a sequence-labelling parser and combine them into an EUD graph. The results were relatively poor, although not a total disaster and could probably be improved with some polishing of the system's rough edges.
STAR-IOS Aided NOMA Networks: Channel Model Approximation and Performance Analysis
Jul 04, 2021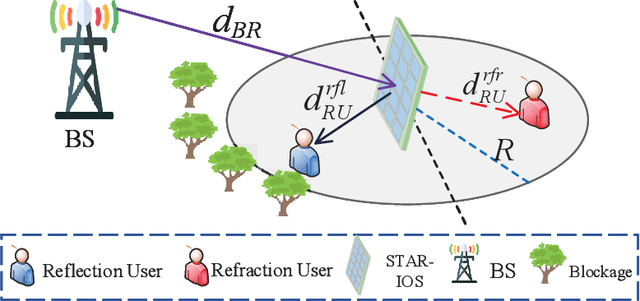
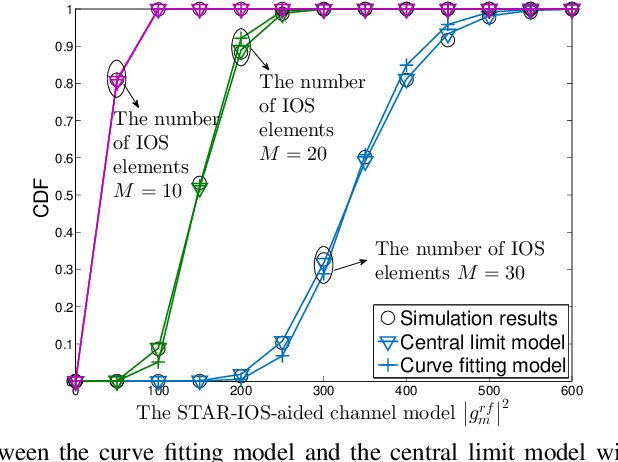
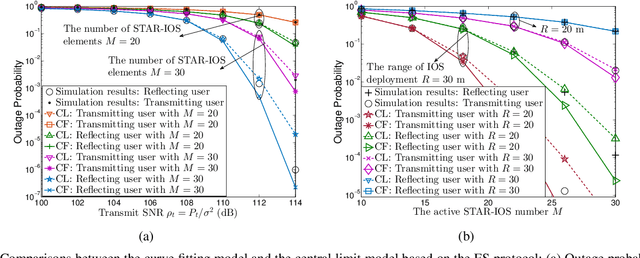
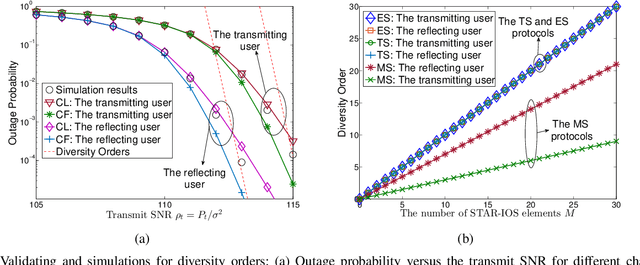
Simultaneous transmitting and reflecting intelligent omini-surfaces (STAR-IOSs) are able to achieve full coverage "smart radio environments". By splitting the energy or altering the active number of STAR-IOS elements, STAR-IOSs provide high flexibility of successive interference cancellation (SIC) orders for non-orthogonal multiple access (NOMA) systems. Based on the aforementioned advantages, this paper investigates a STAR-IOS-aided downlink NOMA network with randomly deployed users. We first propose three tractable channel models for different application scenarios, namely the central limit model, the curve fitting model, and the M-fold convolution model. More specifically, the central limit model fits the scenarios with large-size STAR-IOSs while the curve fitting model is extended to evaluate multi-cell networks. However, these two models cannot obtain accurate diversity orders. Hence, we figure out the M-fold convolution model to derive accurate diversity orders. We consider three protocols for STAR-IOSs, namely, the energy splitting (ES) protocol, the time switching (TS) protocol, and the mode switching (MS) protocol. Based on the ES protocol, we derive analytical outage probability expressions for the paired NOMA users by the central limit model and the curve fitting model. Based on three STAR-IOS protocols, we derive the diversity gains of NOMA users by the M-fold convolution model. The analytical results reveal that the diversity gain of NOMA users is equal to the active number of STAR-IOS elements. Numerical results indicate that 1) in high signal-to-noise ratio regions, the central limit model performs as an upper bound, while a lower bound is obtained by the curve fitting model; 2) the TS protocol has the best performance but requesting more time blocks than other protocols; 3) the ES protocol outperforms the MS protocol as the ES protocol has higher diversity gains.
Deep MRI Reconstruction with Radial Subsampling
Aug 20, 2021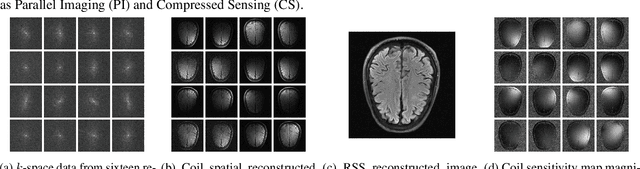
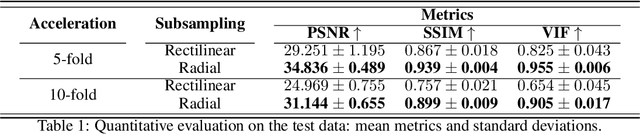
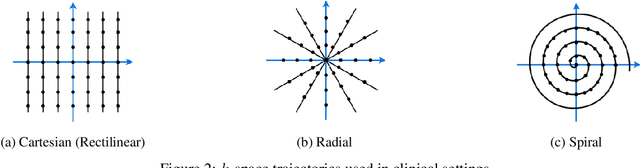
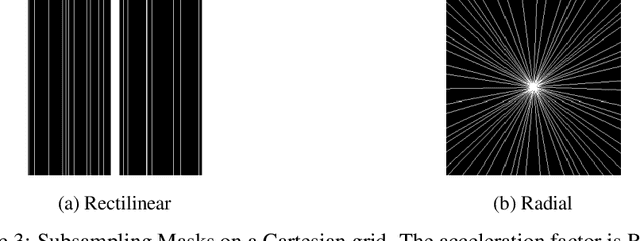
In spite of its extensive adaptation in almost every medical diagnostic and examinatorial application, Magnetic Resonance Imaging (MRI) is still a slow imaging modality which limits its use for dynamic imaging. In recent years, Parallel Imaging (PI) and Compressed Sensing (CS) have been utilised to accelerate the MRI acquisition. In clinical settings, subsampling the k-space measurements during scanning time using Cartesian trajectories, such as rectilinear sampling, is currently the most conventional CS approach applied which, however, is prone to producing aliased reconstructions. With the advent of the involvement of Deep Learning (DL) in accelerating the MRI, reconstructing faithful images from subsampled data became increasingly promising. Retrospectively applying a subsampling mask onto the k-space data is a way of simulating the accelerated acquisition of k-space data in real clinical setting. In this paper we compare and provide a review for the effect of applying either rectilinear or radial retrospective subsampling on the quality of the reconstructions outputted by trained deep neural networks. With the same choice of hyper-parameters, we train and evaluate two distinct Recurrent Inference Machines (RIMs), one for each type of subsampling. The qualitative and quantitative results of our experiments indicate that the model trained on data with radial subsampling attains higher performance and learns to estimate reconstructions with higher fidelity paving the way for other DL approaches to involve radial subsampling.
Cross-Modal Knowledge Transfer via Inter-Modal Translation and Alignment for Affect Recognition
Aug 02, 2021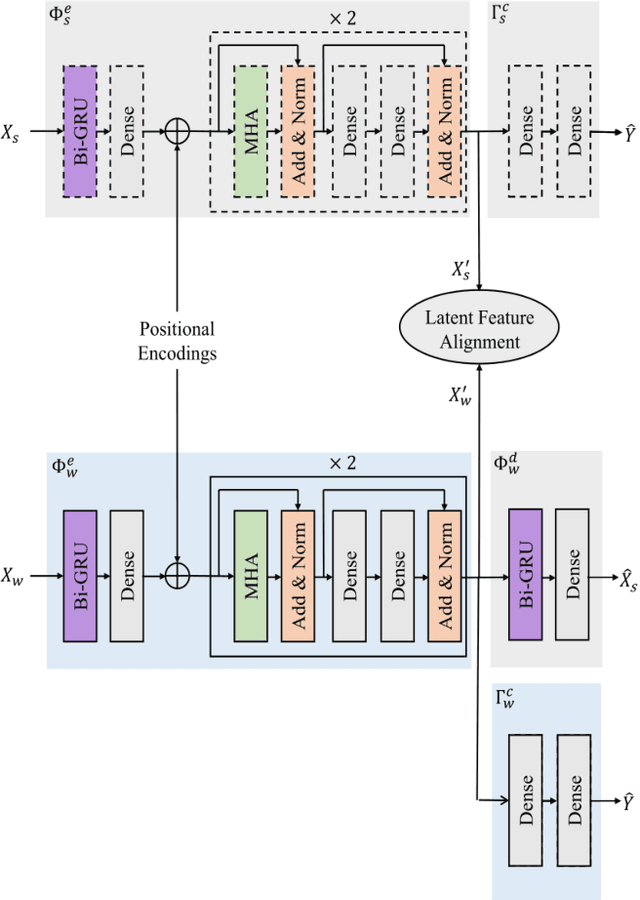
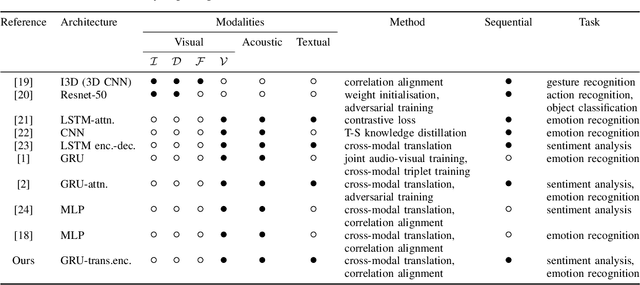
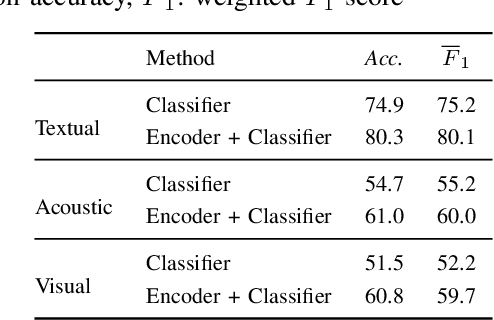
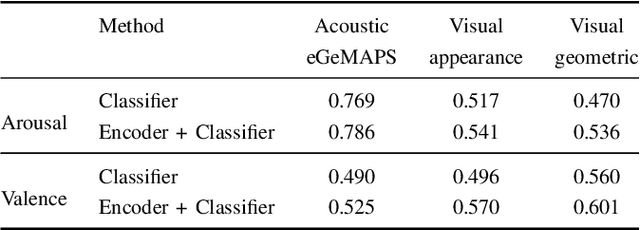
Multi-modal affect recognition models leverage complementary information in different modalities to outperform their uni-modal counterparts. However, due to the unavailability of modality-specific sensors or data, multi-modal models may not be always employable. For this reason, we aim to improve the performance of uni-modal affect recognition models by transferring knowledge from a better-performing (or stronger) modality to a weaker modality during training. Our proposed multi-modal training framework for cross-modal knowledge transfer relies on two main steps. First, an encoder-classifier model creates task-specific representations for the stronger modality. Then, cross-modal translation generates multi-modal intermediate representations, which are also aligned in the latent space with the stronger modality representations. To exploit the contextual information in temporal sequential affect data, we use Bi-GRU and transformer encoder. We validate our approach on two multi-modal affect datasets, namely CMU-MOSI for binary sentiment classification and RECOLA for dimensional emotion regression. The results show that the proposed approach consistently improves the uni-modal test-time performance of the weaker modalities.