 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Estimating Leaf Water Content using Remotely Sensed Hyperspectral Data
Sep 06, 2021
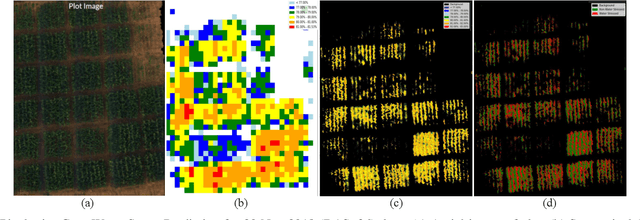
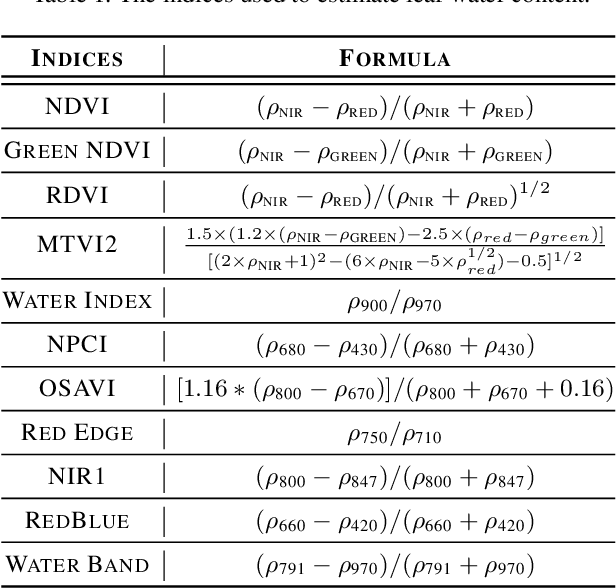
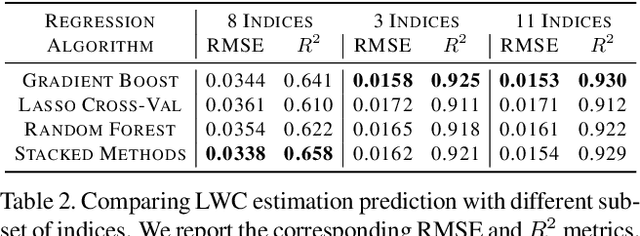
Plant water stress may occur due to the limited availability of water to the roots/soil or due to increased transpiration. These factors adversely affect plant physiology and photosynthetic ability to the extent that it has been shown to have inhibitory effects in both growth and yield [18]. Early identification of plant water stress status enables suitable corrective measures to be applied to obtain the expected crop yield. Further, improving crop yield through precision agriculture methods is a key component of climate policy and the UN sustainable development goals [1]. Leaf water content (LWC) is a measure that can be used to estimate water content and identify stressed plants. LWC during the early crop growth stages is an important indicator of plant productivity and yield. The effect of water stress can be instantaneous [15], affecting gaseous exchange or long-term, significantly reducing [9, 18, 22]. It is thus necessary to identify potential plant water stress during the early stages of growth [15] to introduce corrective irrigation and alleviate stress. LWC is also useful for identifying plant genotypes that are tolerant to water stress and salinity by measuring the stability of LWC even under artificially induced water stress [18, 25]. Such experiments generally employ destructive procedures to obtain the LWC, which is time-consuming and labor intensive. Accordingly, this research has developed a non-destructive method to estimate LWC from UAV-based hyperspectral data.
Risk-Aware Lane Selection on Highway with Dynamic Obstacles
Apr 08, 2021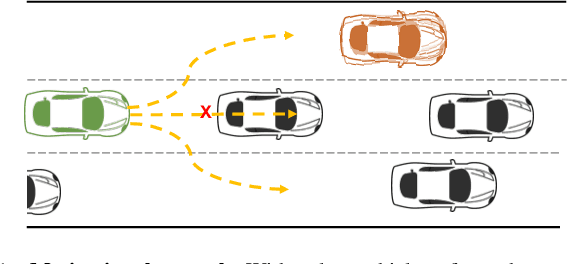
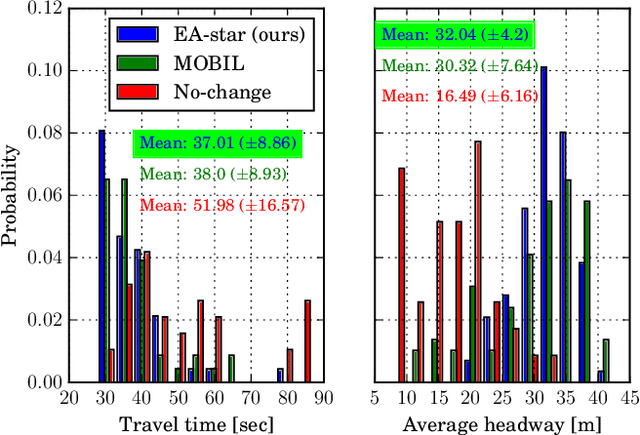
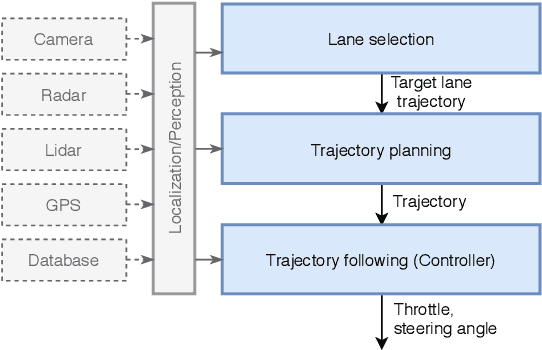
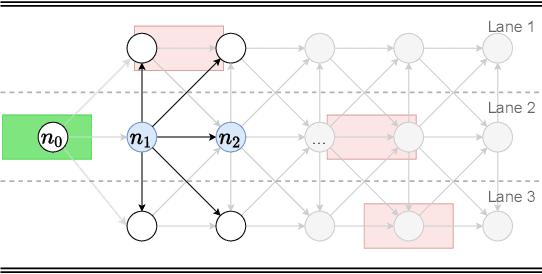
This paper proposes a discretionary lane selection algorithm. In particular, highway driving is considered as a targeted scenario, where each lane has a different level of traffic flow. When lane-changing is discretionary, it is advised not to change lanes unless highly beneficial, e.g., reducing travel time significantly or securing higher safety. Evaluating such "benefit" is a challenge, along with multiple surrounding vehicles in dynamic speed and heading with uncertainty. We propose a real-time lane-selection algorithm with careful cost considerations and with modularity in design. The algorithm is a search-based optimization method that evaluates uncertain dynamic positions of other vehicles under a continuous time and space domain. For demonstration, we incorporate a state-of-the-art motion planner framework (Neural Networks integrated Model Predictive Control) under a CARLA simulation environment.
Real-time Anomaly Detection and Classification in Streaming PMU Data
Nov 14, 2019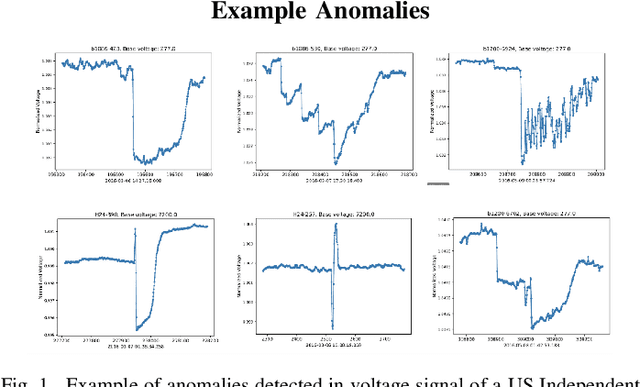
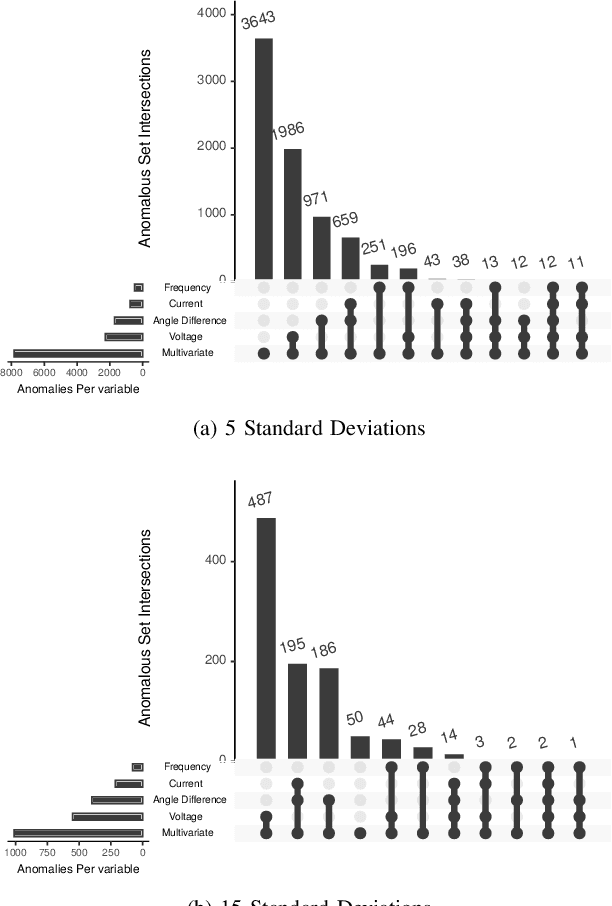
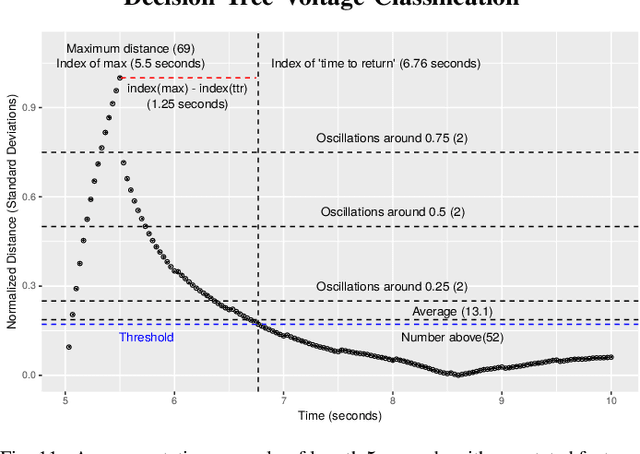
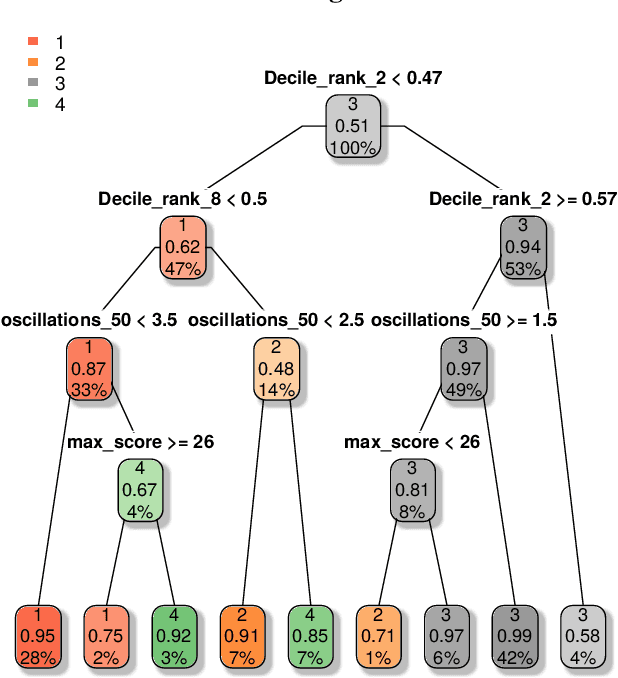
Ensuring secure and reliable operations of the power grid is a primary concern of system operators. Phasor measurement units (PMUs) are rapidly being deployed in the grid to provide fast-sampled operational data that should enable quicker decision-making. This work presents a general interpretable framework for analyzing real-time PMU data, and thus enabling grid operators to understand the current state and to identify anomalies on the fly. Applying statistical learning tools on the streaming data, we first learn an effective dynamical model to describe the current behavior of the system. Next, we use the probabilistic predictions of our learned model to define in a principled way an efficient anomaly detection tool. Finally, the last module of our framework produces on-the-fly classification of the detected anomalies into common occurrence classes using features that grid operators are familiar with. We demonstrate the efficacy of our interpretable approach through extensive numerical experiments on real PMU data collected from a transmission operator in the USA.
On the Feasibility of Modeling OFDM Communication Signals with Unsupervised Generative Adversarial Networks
Sep 10, 2021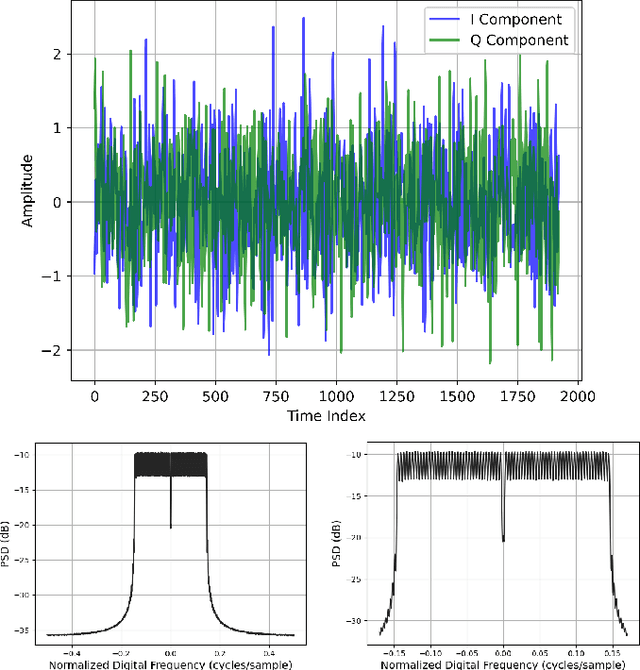

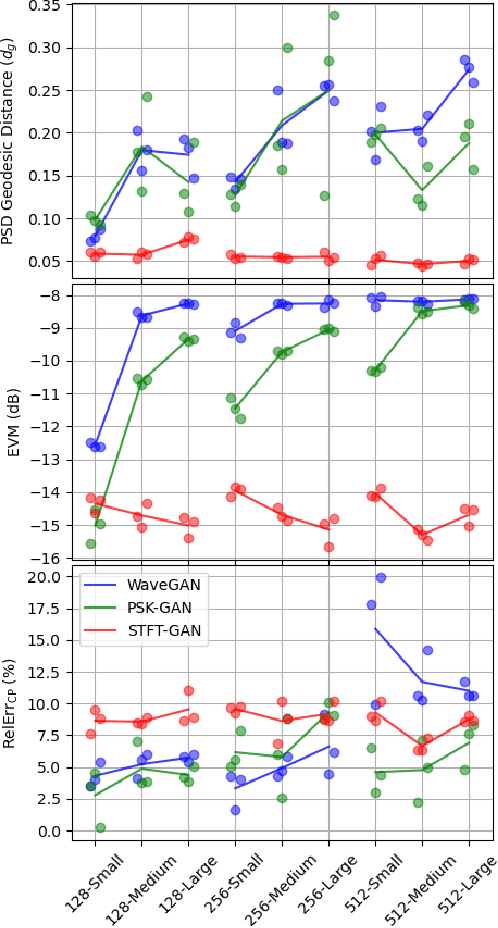
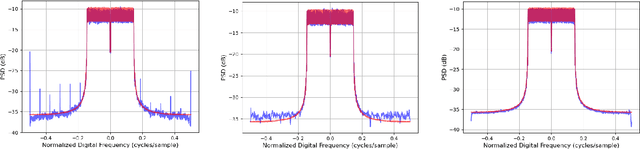
High-quality recordings of radio frequency (RF) emissions from commercial communication hardware in realistic environments are often needed to develop and assess spectrum-sharing technologies and practices, e.g., for training and testing spectrum sensing algorithms and for interference testing. Unfortunately, the time-consuming, expensive nature of such data collections together with data-sharing restrictions pose significant challenges that limit dataset availability. Furthermore, developing accurate models of real-world RF emissions from first principles is often very difficult because system parameters and implementation details are at best only partially known, and complex system dynamics are difficult to characterize. Hence, there is a need for flexible, data-driven methods that can leverage existing datasets to synthesize additional similar waveforms. One promising machine learning approach is unsupervised deep generative modeling with generative adversarial networks (GANs). To date, GANs for RF communication signals have not been studied thoroughly. In this paper, we present the first in-depth investigation of generated signal fidelity for GANs trained with baseband orthogonal frequency-division multiplexing (OFDM) signals, where each subcarrier is digitally modulated with quadrature amplitude modulation (QAM). Building on prior GAN methods, we propose two novel GAN models and evaluate their performance using simulated datasets with known ground truth. Specifically, we investigate model performance with respect to increasing dataset complexity over a range of OFDM parameters and conditions, including fading channels. The findings presented here inform the feasibility of use-cases and provide a foundation for further investigations into deep generative models for RF communication signals.
Quartile-based Prediction of Event Types and Event Time in Business Processes using Deep Learning
Feb 11, 2021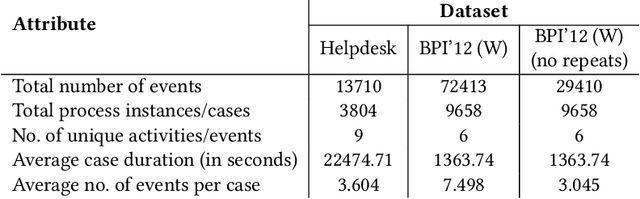
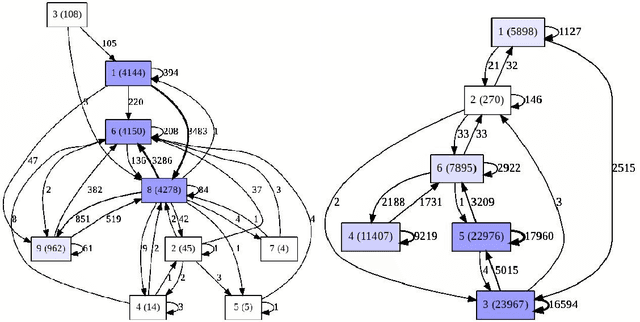
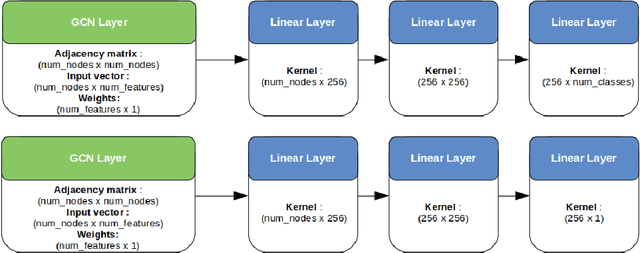
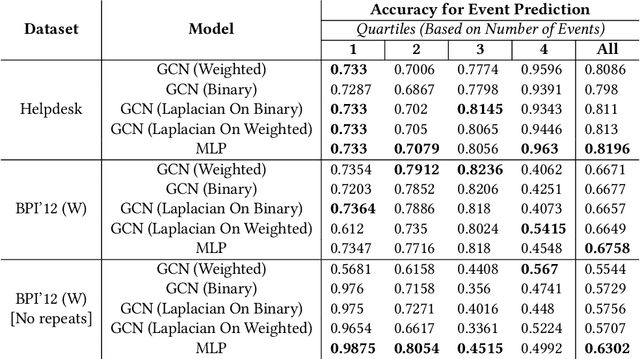
Deep learning models are now being increasingly used for predictive process mining tasks in business processes. Modern approaches have been successful in achieving better performance for different predictive tasks, as compared to traditional approaches. In this work, five different variants of a model involving a Graph Convolutional Layer and linear layers have been tested for the task of predicting the nature and timestamp of the next activity in a given process instance. We have introduced a new method for representing feature vectors for any individual event in a given process instance, taking into consideration the structure of Directly-follows process graphs generated from the corresponding datasets. The adjacency matrix of the process graphs generated has been used as input to a Graph Convolutional Network (GCN). Different model variants make use of variations in the representation of the adjacency matrix. The performance of all the model variants have been tested at different stages of a process, determined by quartiles estimated based on the number of events and the case duration. The results obtained from the experiments, significantly improves over the previously reported results for most of the individual tasks. Interestingly, it was observed that a linear Multi-Layer Perceptron (MLP) with dropout was able to outperform the GCN variants in both the prediction tasks. Using a quartile-based analysis, it was further observed that the other variants were able to perform better than MLP at individual quartiles in some of the tasks where the MLP had the best overall performance.
Short-term forecast of EV charging stations occupancy probability using big data streaming analysis
Apr 26, 2021
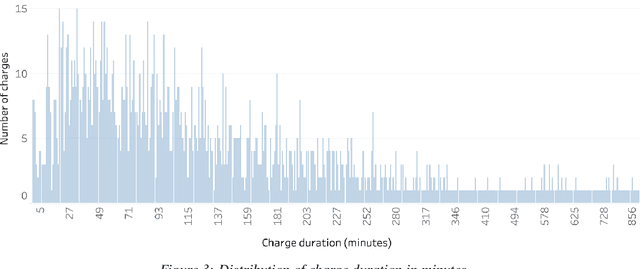
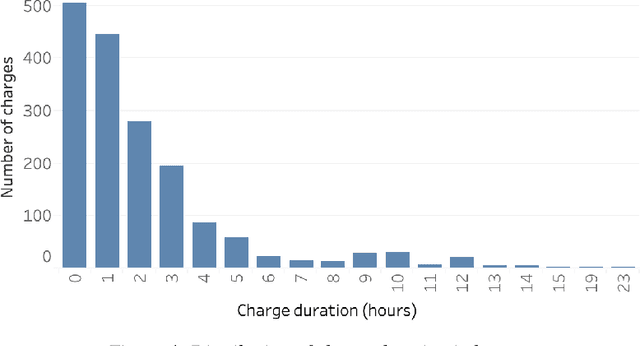
The widespread diffusion of electric mobility requires a contextual expansion of the charging infrastructure. An extended collection and processing of information regarding charging of electric vehicles may turn each electric vehicle charging station into a valuable source of streaming data. Charging point operators may profit from all these data for optimizing their operation and planning activities. In such a scenario, big data and machine learning techniques would allow valorizing real-time data coming from electric vehicle charging stations. This paper presents an architecture able to deal with data streams from a charging infrastructure, with the final aim to forecast electric charging station availability after a set amount of minutes from present time. Both batch data regarding past charges and real-time data streams are used to train a streaming logistic regression model, to take into account recurrent past situations and unexpected actual events. The streaming model performs better than a model trained only using historical data. The results highlight the importance of constantly updating the predictive model parameters in order to adapt to changing conditions and always provide accurate forecasts.
Revitalizing Optimization for 3D Human Pose and Shape Estimation: A Sparse Constrained Formulation
May 28, 2021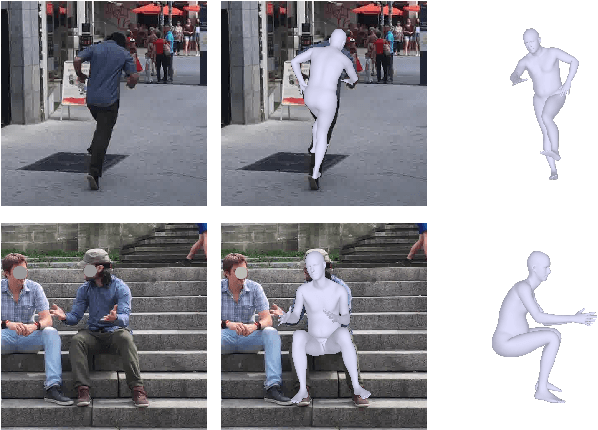
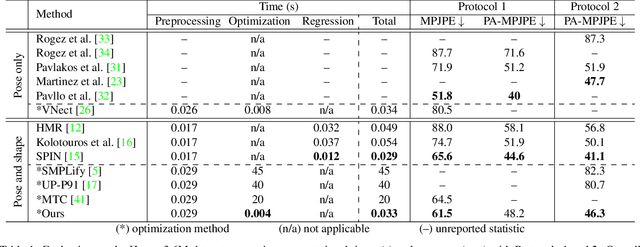

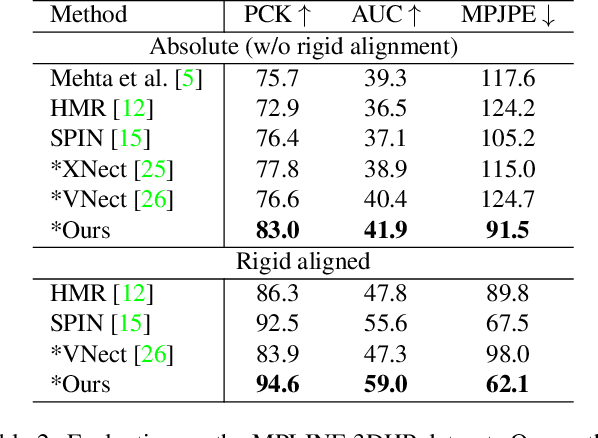
We propose a novel sparse constrained formulation and from it derive a real-time optimization method for 3D human pose and shape estimation. Our optimization method is orders of magnitude faster (avg. 4 ms convergence) than existing optimization methods, while being mathematically equivalent to their dense unconstrained formulation. We achieve this by exploiting the underlying sparsity and constraints of our formulation to efficiently compute the Gauss-Newton direction. We show that this computation scales linearly with the number of joints of a complex 3D human model, in contrast to prior work where it scales cubically due to their dense unconstrained formulation. Based on our optimization method, we present a real-time motion capture framework that estimates 3D human poses and shapes from a single image at over 30 FPS. In benchmarks against state-of-the-art methods on multiple public datasets, our frame-work outperforms other optimization methods and achieves competitive accuracy against regression methods.
A computational geometry approach for modeling neuronal fiber pathways
Aug 02, 2021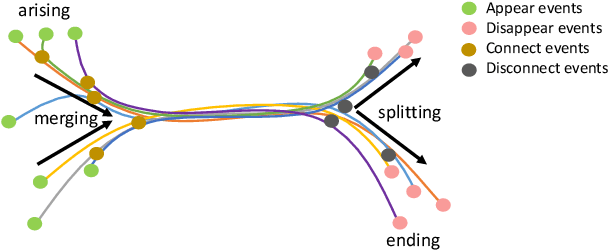
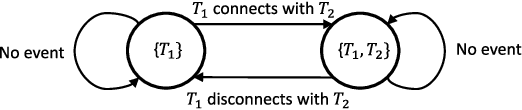
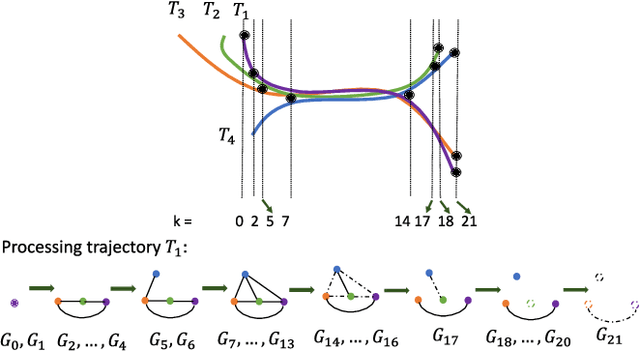
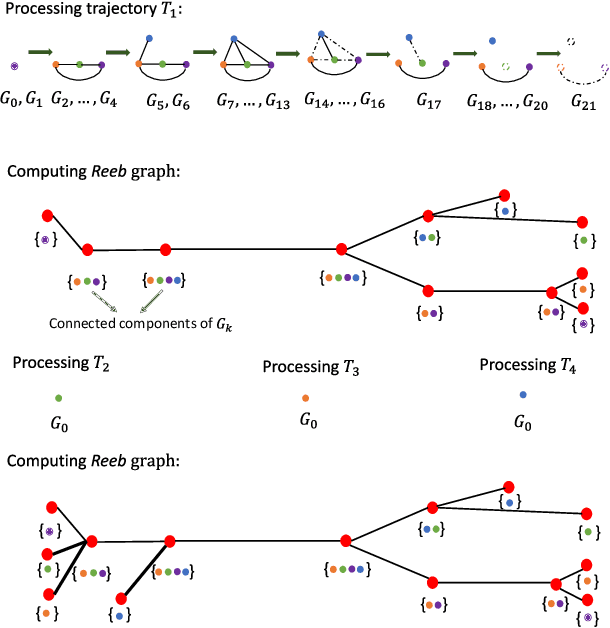
We propose a novel and efficient algorithm to model high-level topological structures of neuronal fibers. Tractography constructs complex neuronal fibers in three dimensions that exhibit the geometry of white matter pathways in the brain. However, most tractography analysis methods are time consuming and intractable. We develop a computational geometry-based tractography representation that aims to simplify the connectivity of white matter fibers. Given the trajectories of neuronal fiber pathways, we model the evolution of trajectories that encodes geometrically significant events and calculate their point correspondence in the 3D brain space. Trajectory inter-distance is used as a parameter to control the granularity of the model that allows local or global representation of the tractogram. Using diffusion MRI data from Alzheimer's patient study, we extract tractography features from our model for distinguishing the Alzheimer's subject from the normal control. Software implementation of our algorithm is available on GitHub.
Complex Spectral Mapping With Attention Based Convolution Recrrent Neural Network for Speech Enhancement
Apr 12, 2021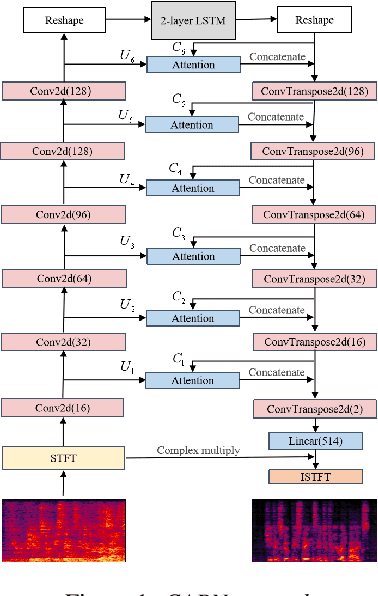

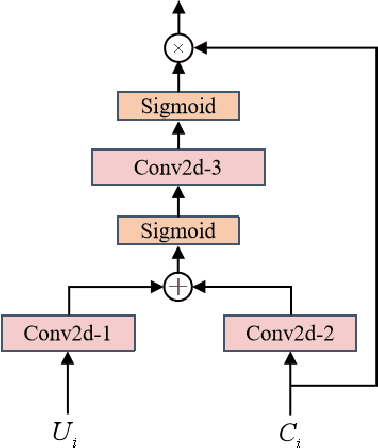
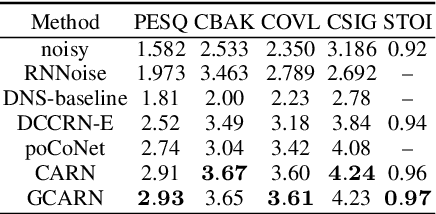
Speech enhancement has benefited from the success of deep learning in terms of intelligibility and perceptual quality. Conventional time-frequency (TF) domain methods focus on predicting TF-masks or speech spectrum,via a naive convolution neural network or recurrent neural network.Some recent studies were based on Complex spectral Mapping convolution recurrent neural network (CRN) . These models skiped directly from encoder layers' output and decoder layers' input ,which maybe thoughtless. We proposed an attention mechanism based skip connection between encoder and decoder layers,namely Complex Spectral Mapping With Attention Based Convolution Recurrent Neural Network (CARN).Compared with CRN model,the proposed CARN model improved more than 10% relatively at several metrics such as PESQ,CBAK,COVL,CSIG and son,and outperformed the place 1st model in both real time and non-real time track of the DNS Challenge 2020 at these metrics.
Generalisation in fully-connected neural networks for time series forecasting
Feb 14, 2019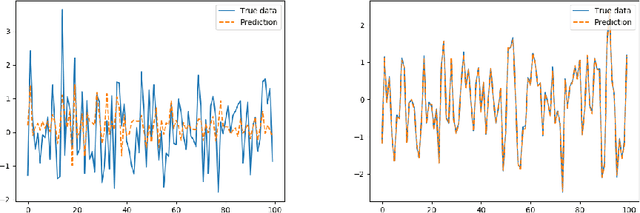
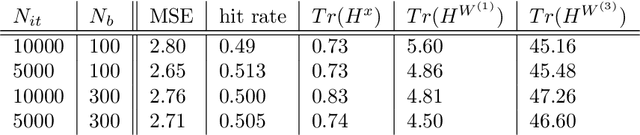
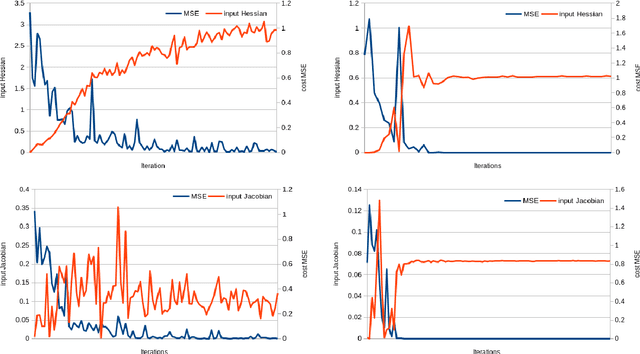
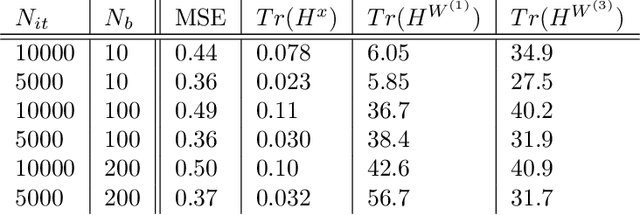
In this paper we study the generalisation capabilities of fully-connected neural networks trained in the context of time series forecasting. Time series do not satisfy the typical assumption in statistical learning theory of the data being i.i.d. samples from some data-generating distribution. We use the input and weight Hessians, that is the smoothness of the learned function with respect to the input and the width of the minimum in weight space, to quantify a network's ability to generalise to unseen data. While such generalisation metrics have been studied extensively in the i.i.d. setting of for example image recognition, here we empirically validate their use in the task of time series forecasting. Furthermore we discuss how one can control the generalisation capability of the network by means of the training process using the learning rate, batch size and the number of training iterations as controls. Using these hyperparameters one can efficiently control the complexity of the output function without imposing explicit constraints.