 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Planning Jerk-Optimized Trajectory with Discrete-Time Constraints for Redundant Robots
Sep 14, 2019
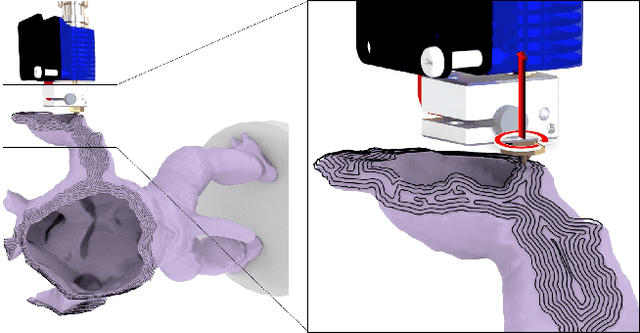
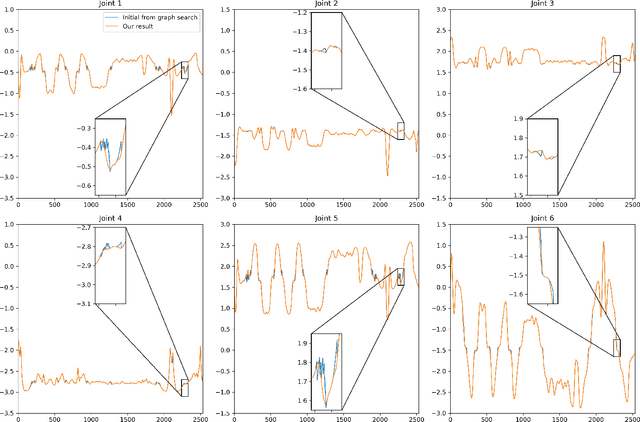
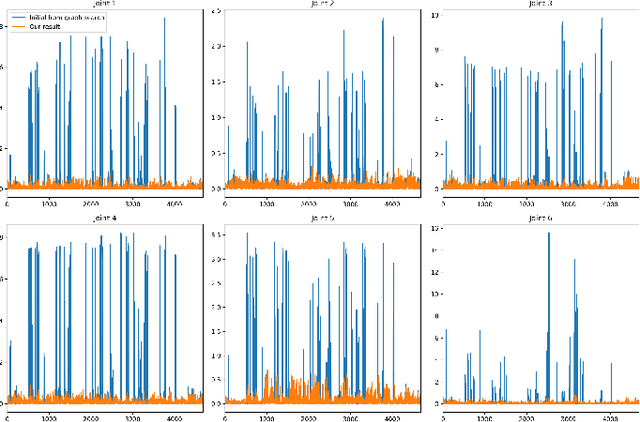
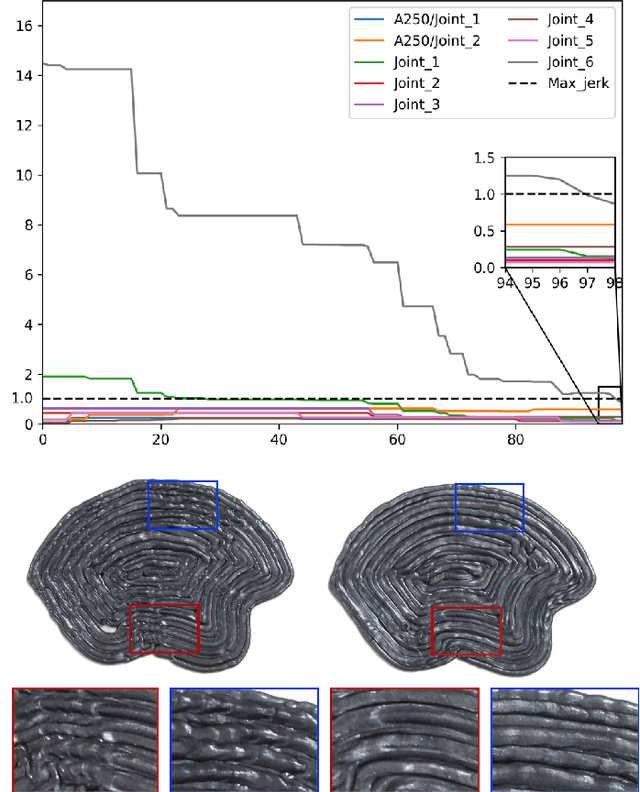
We present a method for effectively planning the motion trajectory of robots in manufacturing tasks, the tool-paths of which are usually complex and have a large number of discrete-time constraints as waypoints. Kinematic redundancy also exists in these robotic systems. The jerk of motion is optimized in our trajectory planning method at the meanwhile of fabrication process to improve the quality of fabrication.
Design of a dynamic and self-adapting system, supported with artificial intelligence, machine learning and real-time intelligence for predictive cyber risk analytics
May 19, 2020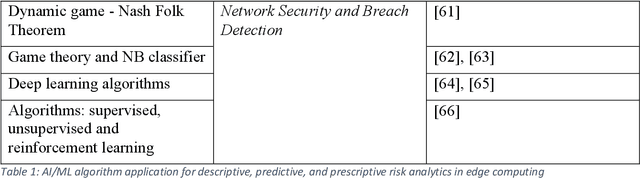
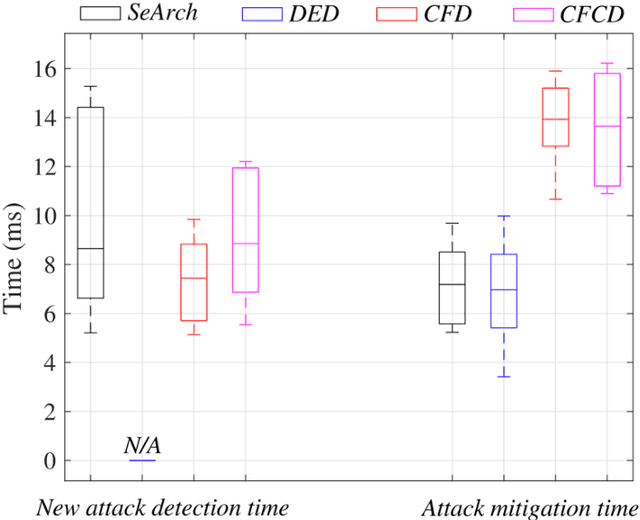
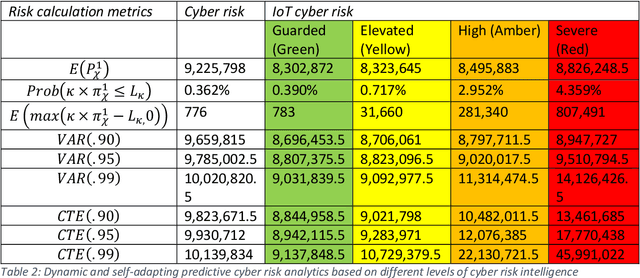
This paper surveys deep learning algorithms, IoT cyber security and risk models, and established mathematical formulas to identify the best approach for developing a dynamic and self-adapting system for predictive cyber risk analytics supported with Artificial Intelligence and Machine Learning and real-time intelligence in edge computing. The paper presents a new mathematical approach for integrating concepts for cognition engine design, edge computing and Artificial Intelligence and Machine Learning to automate anomaly detection. This engine instigates a step change by applying Artificial Intelligence and Machine Learning embedded at the edge of IoT networks, to deliver safe and functional real-time intelligence for predictive cyber risk analytics. This will enhance capacities for risk analytics and assists in the creation of a comprehensive and systematic understanding of the opportunities and threats that arise when edge computing nodes are deployed, and when Artificial Intelligence and Machine Learning technologies are migrated to the periphery of the internet and into local IoT networks.
HSMD: An object motion detection algorithm using a Hybrid Spiking Neural Network Architecture
Sep 09, 2021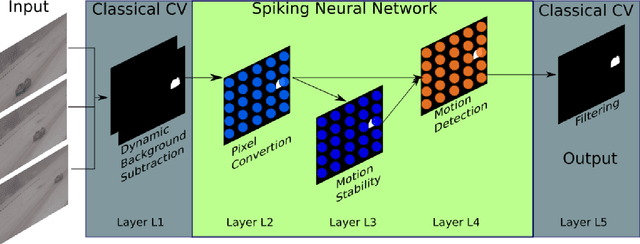
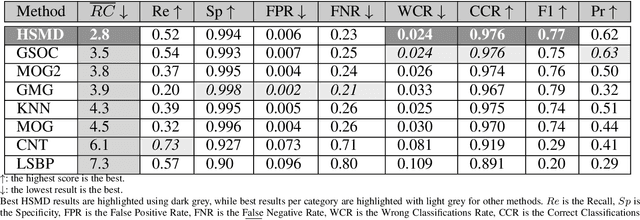
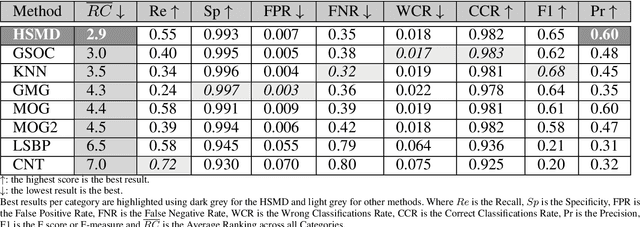
The detection of moving objects is a trivial task performed by vertebrate retinas, yet a complex computer vision task. Object-motion-sensitive ganglion cells (OMS-GC) are specialised cells in the retina that sense moving objects. OMS-GC take as input continuous signals and produce spike patterns as output, that are transmitted to the Visual Cortex via the optic nerve. The Hybrid Sensitive Motion Detector (HSMD) algorithm proposed in this work enhances the GSOC dynamic background subtraction (DBS) algorithm with a customised 3-layer spiking neural network (SNN) that outputs spiking responses akin to the OMS-GC. The algorithm was compared against existing background subtraction (BS) approaches, available on the OpenCV library, specifically on the 2012 change detection (CDnet2012) and the 2014 change detection (CDnet2014) benchmark datasets. The results show that the HSMD was ranked overall first among the competing approaches and has performed better than all the other algorithms on four of the categories across all the eight test metrics. Furthermore, the HSMD proposed in this paper is the first to use an SNN to enhance an existing state of the art DBS (GSOC) algorithm and the results demonstrate that the SNN provides near real-time performance in realistic applications.
The Impact of Algorithmic Risk Assessments on Human Predictions and its Analysis via Crowdsourcing Studies
Sep 03, 2021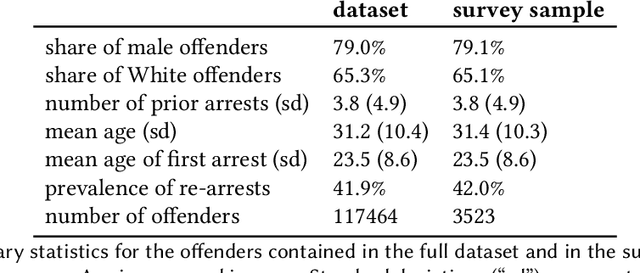
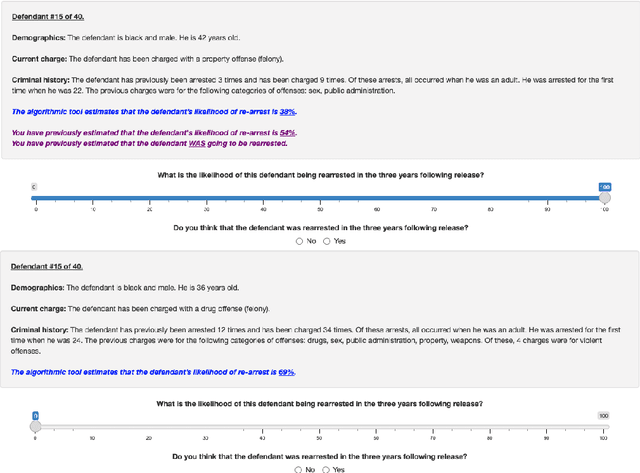
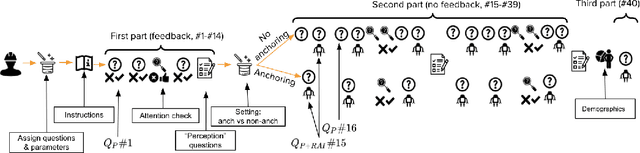
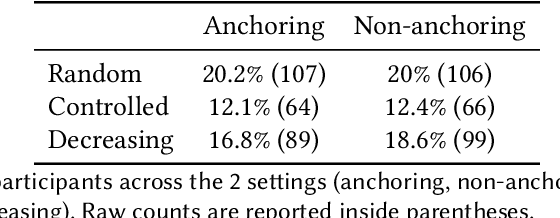
As algorithmic risk assessment instruments (RAIs) are increasingly adopted to assist decision makers, their predictive performance and potential to promote inequity have come under scrutiny. However, while most studies examine these tools in isolation, researchers have come to recognize that assessing their impact requires understanding the behavior of their human interactants. In this paper, building off of several recent crowdsourcing works focused on criminal justice, we conduct a vignette study in which laypersons are tasked with predicting future re-arrests. Our key findings are as follows: (1) Participants often predict that an offender will be rearrested even when they deem the likelihood of re-arrest to be well below 50%; (2) Participants do not anchor on the RAI's predictions; (3) The time spent on the survey varies widely across participants and most cases are assessed in less than 10 seconds; (4) Judicial decisions, unlike participants' predictions, depend in part on factors that are orthogonal to the likelihood of re-arrest. These results highlight the influence of several crucial but often overlooked design decisions and concerns around generalizability when constructing crowdsourcing studies to analyze the impacts of RAIs.
Global Constraint Catalog, Volume II, Time-Series Constraints
Sep 18, 2018
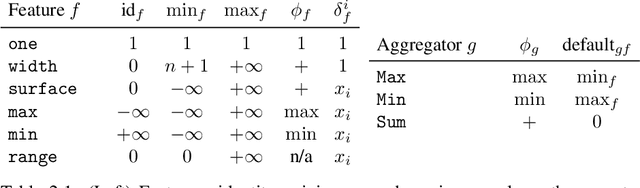
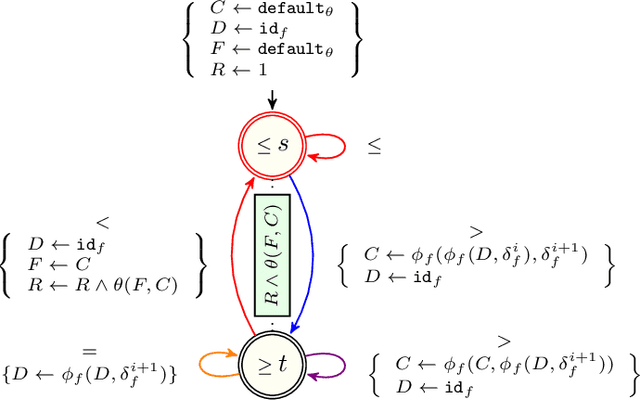
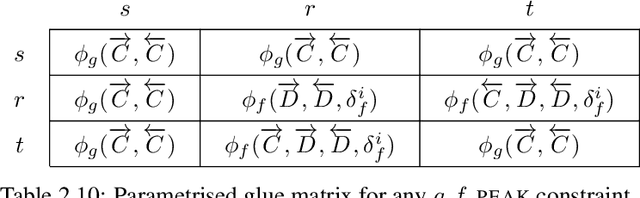
First this report presents a restricted set of finite transducers used to synthesise structural time-series constraints described by means of a multi-layered function composition scheme. Second it provides the corresponding synthesised catalogue of structural time-series constraints where each constraint is explicitly described in terms of automata with registers.
Online Interaction Detection for Click-Through Rate Prediction
Jun 27, 2021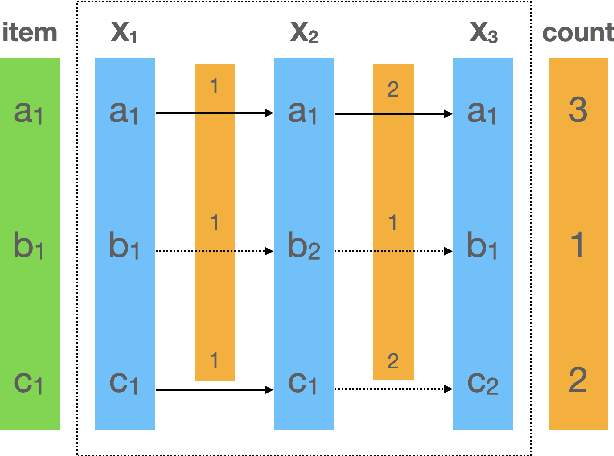
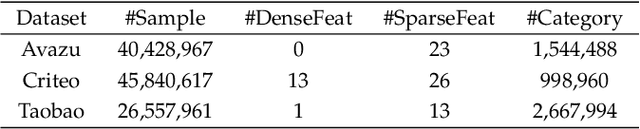
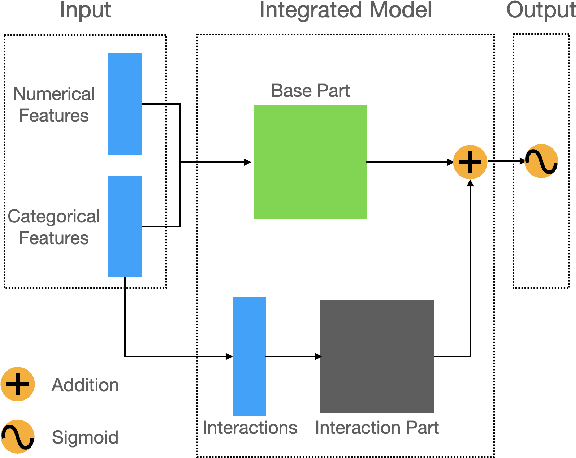
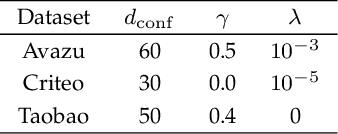
Click-Through Rate prediction aims to predict the ratio of clicks to impressions of a specific link. This is a challenging task since (1) there are usually categorical features, and the inputs will be extremely high-dimensional if one-hot encoding is applied, (2) not only the original features but also their interactions are important, (3) an effective prediction may rely on different features and interactions in different time periods. To overcome these difficulties, we propose a new interaction detection method, named Online Random Intersection Chains. The method, which is based on the idea of frequent itemset mining, detects informative interactions by observing the intersections of randomly chosen samples. The discovered interactions enjoy high interpretability as they can be comprehended as logical expressions. ORIC can be updated every time new data is collected, without being retrained on historical data. What's more, the importance of the historical and latest data can be controlled by a tuning parameter. A framework is designed to deal with the streaming interactions, so almost all existing models for CTR prediction can be applied after interaction detection. Empirical results demonstrate the efficiency and effectiveness of ORIC on three benchmark datasets.
Deep Learning for Reduced Order Modelling and Efficient Temporal Evolution of Fluid Simulations
Jul 09, 2021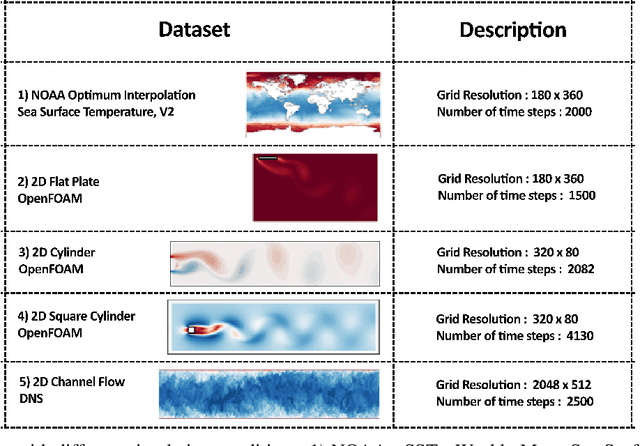

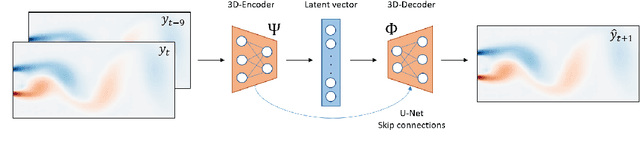
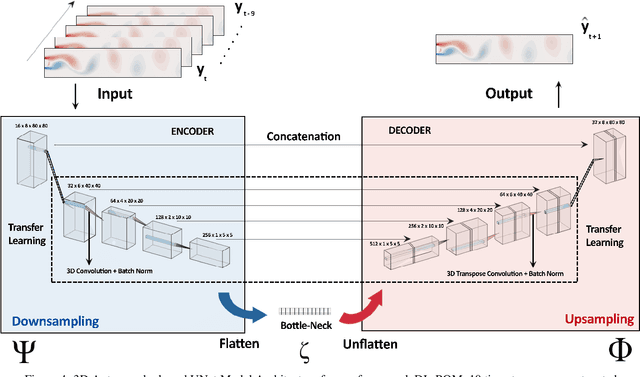
Reduced Order Modelling (ROM) has been widely used to create lower order, computationally inexpensive representations of higher-order dynamical systems. Using these representations, ROMs can efficiently model flow fields while using significantly lesser parameters. Conventional ROMs accomplish this by linearly projecting higher-order manifolds to lower-dimensional space using dimensionality reduction techniques such as Proper Orthogonal Decomposition (POD). In this work, we develop a novel deep learning framework DL-ROM (Deep Learning - Reduced Order Modelling) to create a neural network capable of non-linear projections to reduced order states. We then use the learned reduced state to efficiently predict future time steps of the simulation using 3D Autoencoder and 3D U-Net based architectures. Our model DL-ROM is able to create highly accurate reconstructions from the learned ROM and is thus able to efficiently predict future time steps by temporally traversing in the learned reduced state. All of this is achieved without ground truth supervision or needing to iteratively solve the expensive Navier-Stokes(NS) equations thereby resulting in massive computational savings. To test the effectiveness and performance of our approach, we evaluate our implementation on five different Computational Fluid Dynamics (CFD) datasets using reconstruction performance and computational runtime metrics. DL-ROM can reduce the computational runtimes of iterative solvers by nearly two orders of magnitude while maintaining an acceptable error threshold.
Focus on Impact: Indoor Exploration with Intrinsic Motivation
Sep 14, 2021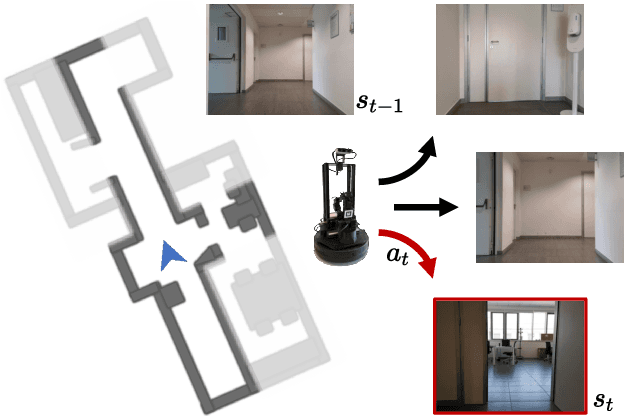
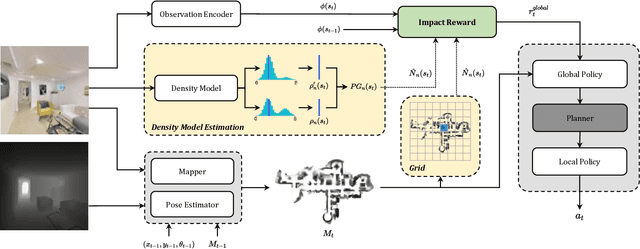
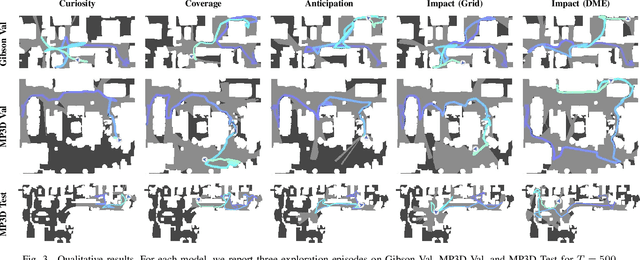
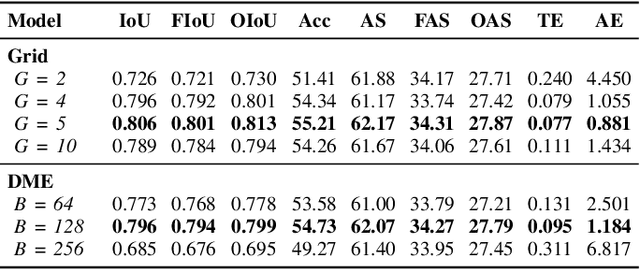
Exploration of indoor environments has recently experienced a significant interest, also thanks to the introduction of deep neural agents built in a hierarchical fashion and trained with Deep Reinforcement Learning (DRL) on simulated environments. Current state-of-the-art methods employ a dense extrinsic reward that requires the complete a priori knowledge of the layout of the training environment to learn an effective exploration policy. However, such information is expensive to gather in terms of time and resources. In this work, we propose to train the model with a purely intrinsic reward signal to guide exploration, which is based on the impact of the robot's actions on the environment. So far, impact-based rewards have been employed for simple tasks and in procedurally generated synthetic environments with countable states. Since the number of states observable by the agent in realistic indoor environments is non-countable, we include a neural-based density model and replace the traditional count-based regularization with an estimated pseudo-count of previously visited states. The proposed exploration approach outperforms DRL-based competitors relying on intrinsic rewards and surpasses the agents trained with a dense extrinsic reward computed with the environment layouts. We also show that a robot equipped with the proposed approach seamlessly adapts to point-goal navigation and real-world deployment.
Probabilistic Bearing Fault Diagnosis Using Gaussian Process with Tailored Feature Extraction
Sep 19, 2021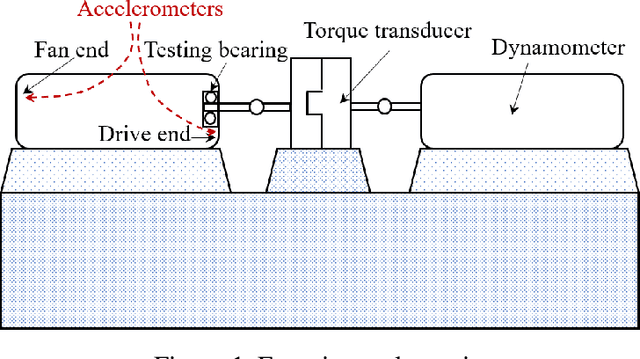
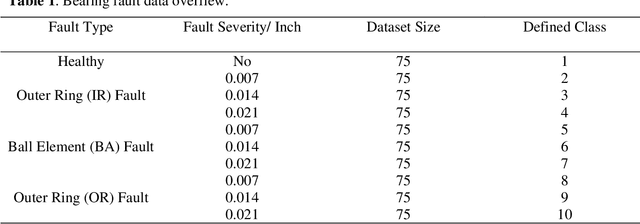
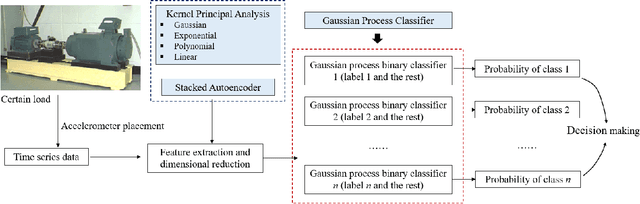

Rolling bearings are subject to various faults due to its long-time operation under harsh environment, which will lead to unexpected breakdown of machinery system and cause severe accidents. Deep learning methods recently have gained growing interests and extensively applied in the data-driven bearing fault diagnosis. However, current deep learning methods perform the bearing fault diagnosis in the form of deterministic classification, which overlook the uncertainties that inevitably exist in actual practice. To tackle this issue, in this research we develop a probabilistic fault diagnosis framework that can account for the uncertainty effect in prediction, which bears practical significance. This framework fully leverages the probabilistic feature of Gaussian process classifier (GPC). To facilitate the establishment of high-fidelity GPC, the tailored feature extraction with dimensionality reduction method can be optimally determined through the cross validation-based grid search upon a prespecified method pool consisting of various kernel principal component analysis (KPCA) methods and stacked autoencoder. This strategy can ensure the complex nonlinear relations between the features and faults to be adequately characterized. Furthermore, the sensor fusion concept is adopted to enhance the diagnosis performance. As compared with the traditional deep learning methods, this proposed framework usually requires less labeled data and less effort for parameter tuning. Systematic case studies using the publicly accessible experimental rolling bearing dataset are carried out to validate this new framework. Various influencing factors on fault diagnosis performance also are thoroughly investigated.
Real-time monitoring of driver drowsiness on mobile platforms using 3D neural networks
Oct 15, 2019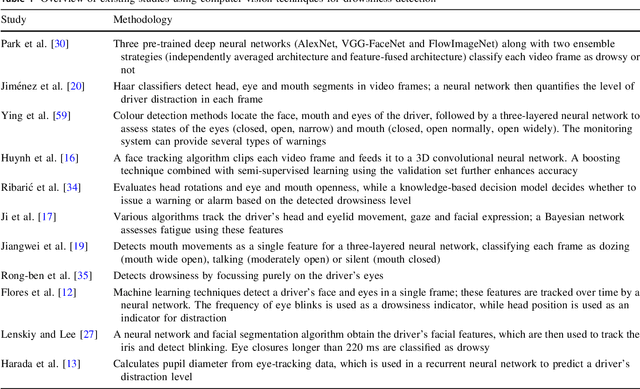
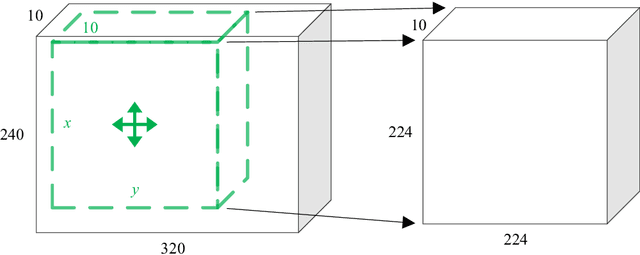
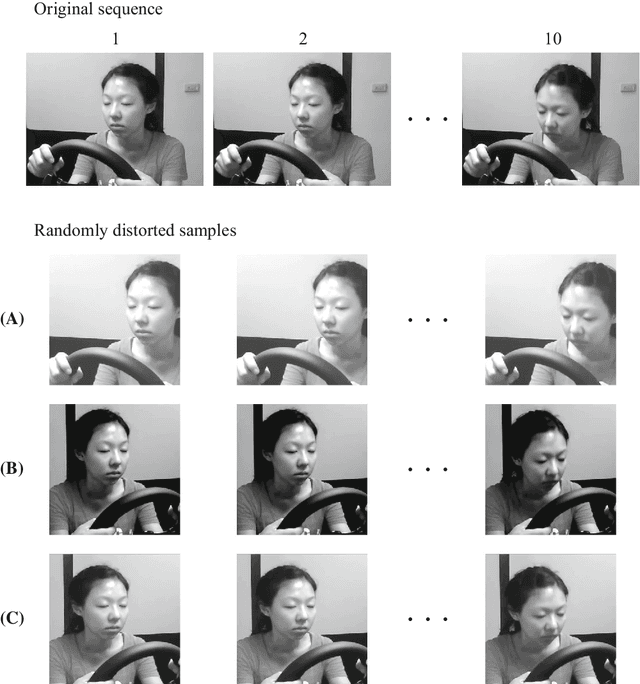
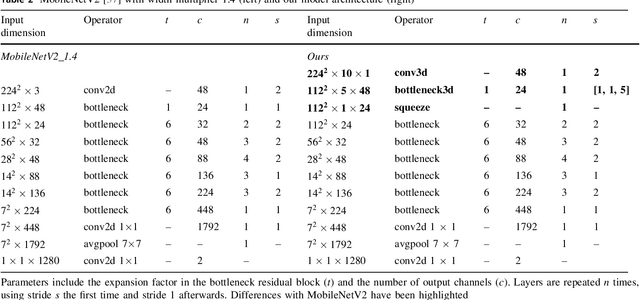
Driver drowsiness increases crash risk, leading to substantial road trauma each year. Drowsiness detection methods have received considerable attention, but few studies have investigated the implementation of a detection approach on a mobile phone. Phone applications reduce the need for specialised hardware and hence, enable a cost-effective roll-out of the technology across the driving population. While it has been shown that three-dimensional (3D) operations are more suitable for spatiotemporal feature learning, current methods for drowsiness detection commonly use frame-based, multi-step approaches. However, computationally expensive techniques that achieve superior results on action recognition benchmarks (e.g. 3D convolutions, optical flow extraction) create bottlenecks for real-time, safety-critical applications on mobile devices. Here, we show how depthwise separable 3D convolutions, combined with an early fusion of spatial and temporal information, can achieve a balance between high prediction accuracy and real-time inference requirements. In particular, increased accuracy is achieved when assessment requires motion information, for example, when sunglasses conceal the eyes. Further, a custom TensorFlow-based smartphone application shows the true impact of various approaches on inference times and demonstrates the effectiveness of real-time monitoring based on out-of-sample data to alert a drowsy driver. Our model is pre-trained on ImageNet and Kinetics and fine-tuned on a publicly available Driver Drowsiness Detection dataset. Fine-tuning on large naturalistic driving datasets could further improve accuracy to obtain robust in-vehicle performance. Overall, our research is a step towards practical deep learning applications, potentially preventing micro-sleeps and reducing road trauma.
* 13 pages, 2 figures, 'Online First' version. For associated mp4 files, see journal website