 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Advancing Brain Metastases Detection in T1-Weighted Contrast-Enhanced 3D MRI using Noisy Student-based Training
Nov 10, 2021
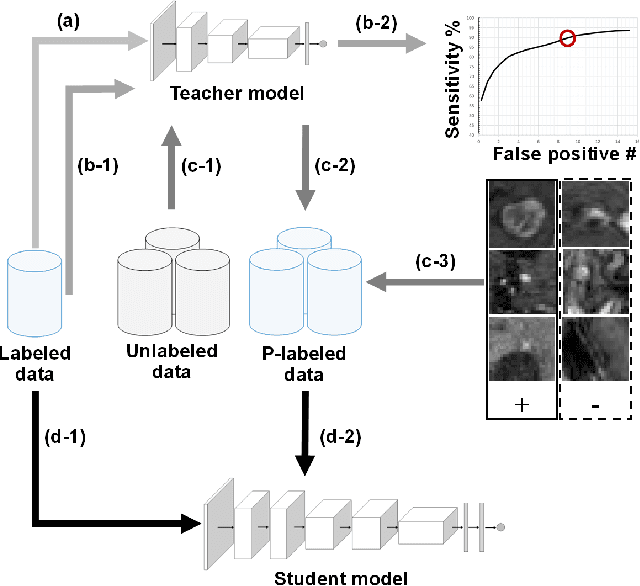
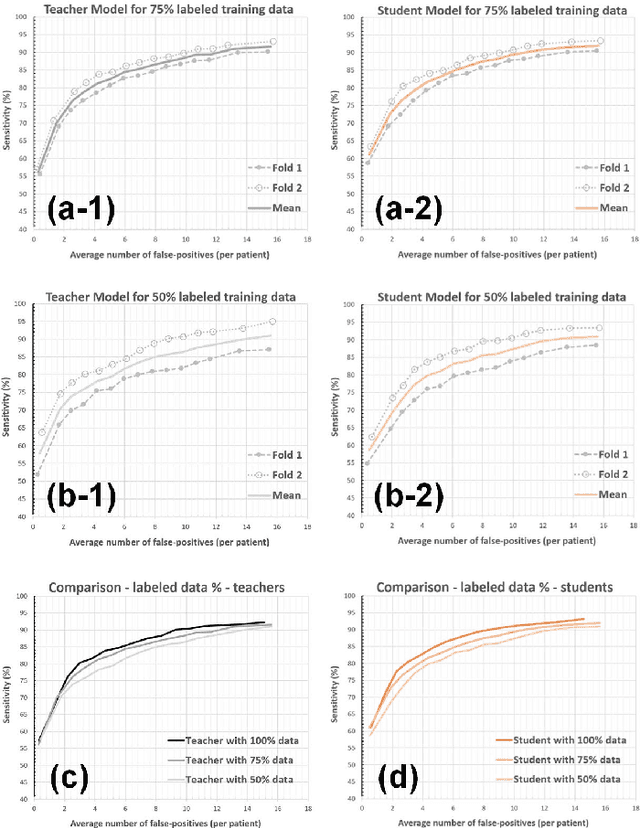
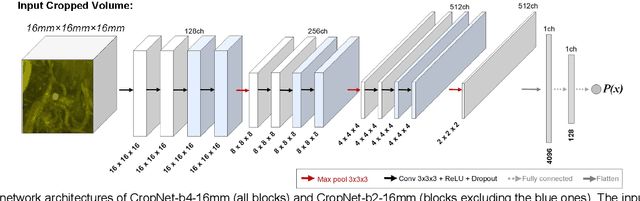
The detection of brain metastases (BM) in their early stages could have a positive impact on the outcome of cancer patients. We previously developed a framework for detecting small BM (with diameters of less than 15mm) in T1-weighted Contrast-Enhanced 3D Magnetic Resonance images (T1c) to assist medical experts in this time-sensitive and high-stakes task. The framework utilizes a dedicated convolutional neural network (CNN) trained using labeled T1c data, where the ground truth BM segmentations were provided by a radiologist. This study aims to advance the framework with a noisy student-based self-training strategy to make use of a large corpus of unlabeled T1c data (i.e., data without BM segmentations or detections). Accordingly, the work (1) describes the student and teacher CNN architectures, (2) presents data and model noising mechanisms, and (3) introduces a novel pseudo-labeling strategy factoring in the learned BM detection sensitivity of the framework. Finally, it describes a semi-supervised learning strategy utilizing these components. We performed the validation using 217 labeled and 1247 unlabeled T1c exams via 2-fold cross-validation. The framework utilizing only the labeled exams produced 9.23 false positives for 90% BM detection sensitivity; whereas, the framework using the introduced learning strategy led to ~9% reduction in false detections (i.e., 8.44) for the same sensitivity level. Furthermore, while experiments utilizing 75% and 50% of the labeled datasets resulted in algorithm performance degradation (12.19 and 13.89 false positives respectively), the impact was less pronounced with the noisy student-based training strategy (10.79 and 12.37 false positives respectively).
Mapping illegal waste dumping sites with neural-network classification of satellite imagery
Oct 16, 2021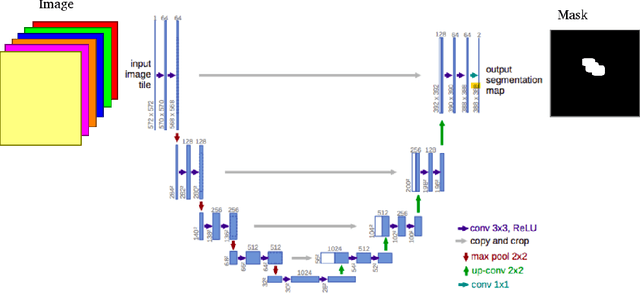

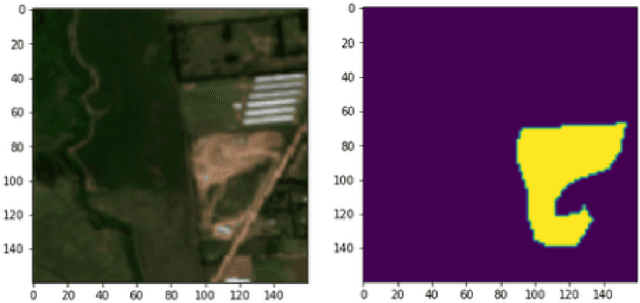
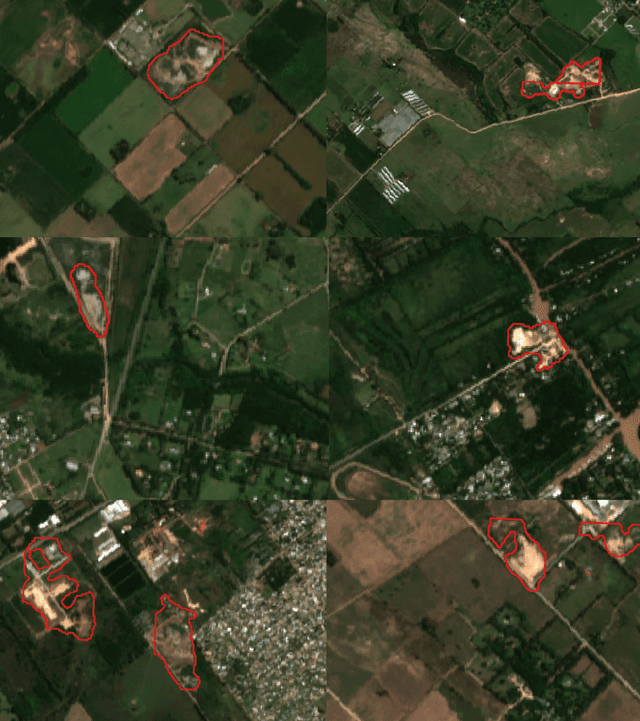
Public health and habitat quality are crucial goals of urban planning. In recent years, the severe social and environmental impact of illegal waste dumping sites has made them one of the most serious problems faced by cities in the Global South, in a context of scarce information available for decision making. To help identify the location of dumping sites and track their evolution over time we adopt a data-driven model from the machine learning domain, analyzing satellite images. This allows us to take advantage of the increasing availability of geo-spatial open-data, high-resolution satellite imagery, and open source tools to train machine learning algorithms with a small set of known waste dumping sites in Buenos Aires, and then predict the location of other sites over vast areas at high speed and low cost. This case study shows the results of a collaboration between Dymaxion Labs and Fundaci\'on Bunge y Born to harness this technique in order to create a comprehensive map of potential locations of illegal waste dumping sites in the region.
MoTiAC: Multi-Objective Actor-Critics for Real-Time Bidding
Feb 18, 2020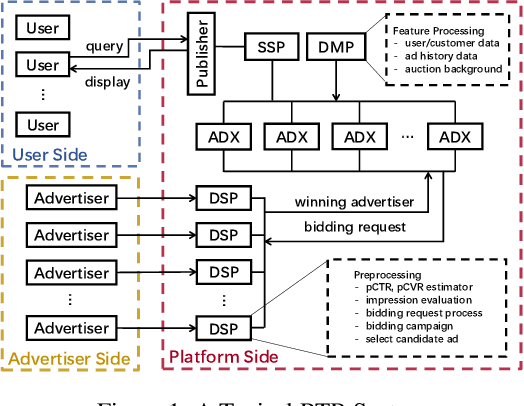
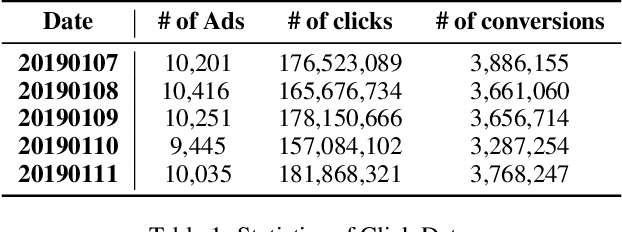
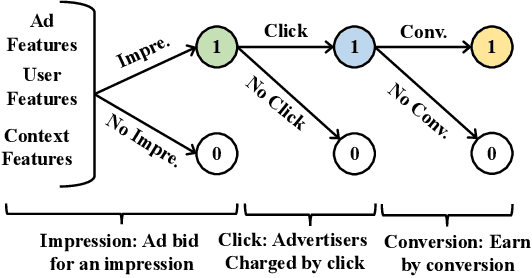
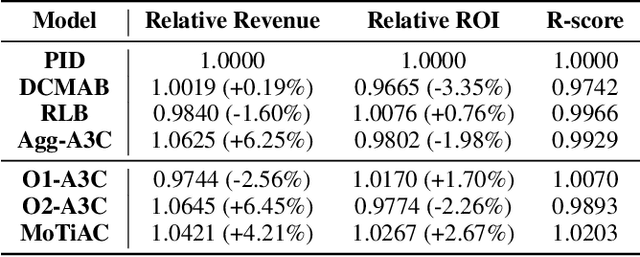
Online real-time bidding (RTB) is known as a complex auction game where ad platforms seek to consider various influential key performance indicators (KPIs), like revenue and return on investment (ROI). The trade-off among these competing goals needs to be balanced on a massive scale. To address the problem, we propose a multi-objective reinforcement learning algorithm, named MoTiAC, for the problem of bidding optimization with various goals. Specifically, in MoTiAC, instead of using a fixed and linear combination of multiple objectives, we compute adaptive weights overtime on the basis of how well the current state agrees with the agent's prior. In addition, we provide interesting properties of model updating and further prove that Pareto optimality could be guaranteed. We demonstrate the effectiveness of our method on a real-world commercial dataset. Experiments show that the model outperforms all state-of-the-art baselines.
A Tutorial on Terahertz-Band Localization for 6G Communication Systems
Oct 16, 2021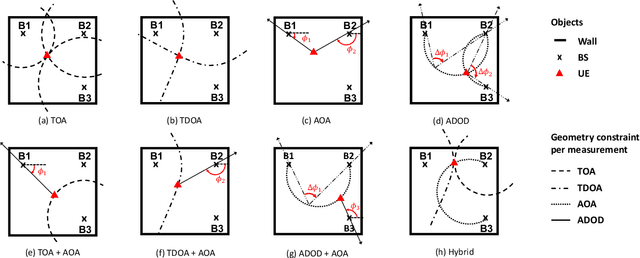
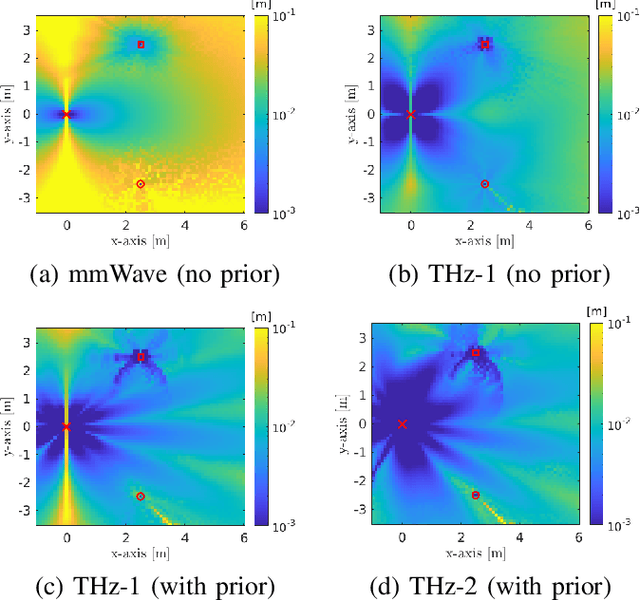
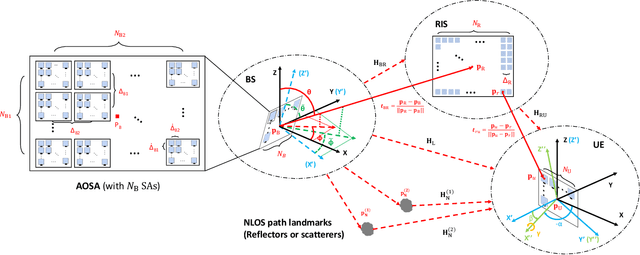
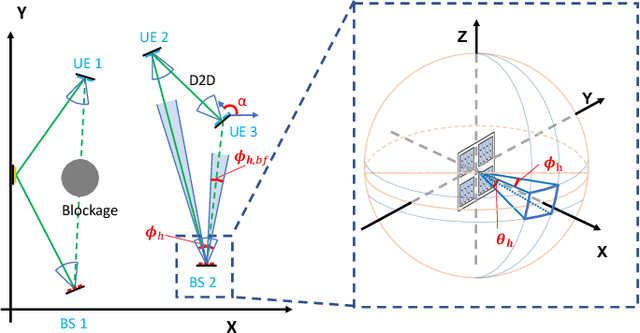
Terahertz (THz) communications are celebrated as key enablers for converged localization and sensing in future sixth-generation (6G) wireless communication systems and beyond. Instead of being a byproduct of the communication system, localization in 6G is indispensable for location-aware communications. Towards this end, we aim to identify the prospects, challenges, and requirements of THz localization techniques. We first review the history and trends of localization methods and discuss their objectives, constraints, and applications in contemporary communication systems. We then detail the latest advances in THz communications and introduce the THz-specific channel and system models. Afterward, we formulate THz-band localization as a 3D position/orientation estimation problem, detailing geometry-based localization techniques and describing potential THz localization and sensing extensions. We further formulate the offline design and online optimization of THz localization systems, provide numerical simulation results, and conclude by providing insight into interdisciplinary future research directions. Preliminary results illustrate that under the same total transmission power and time, THz-based localization is ~5 (~20) times more accurate than mmWave-based localization without (with) prior position information.
Spatial Constraint Generation for Motion Planning in Dynamic Environments
Oct 27, 2021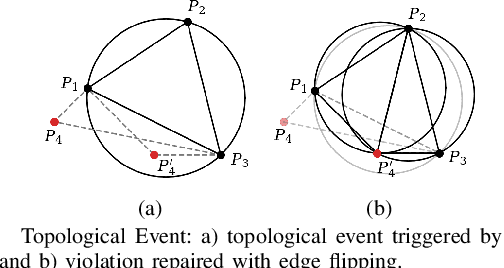
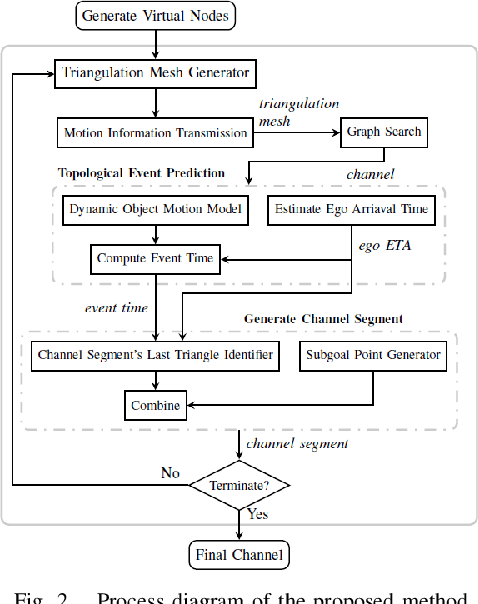
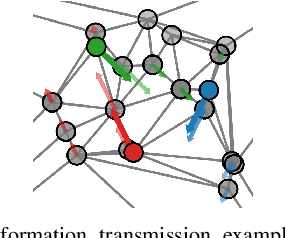
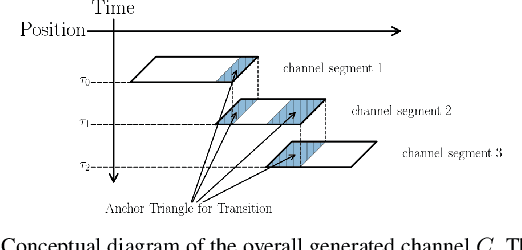
This paper presents a novel method to generate spatial constraints for motion planning in dynamic environments. Motion planning methods for autonomous driving and mobile robots typically need to rely on the spatial constraints imposed by a map-based global planner to generate a collision-free trajectory. These methods may fail without an offline map or where the map is invalid due to dynamic changes in the environment such as road obstruction, construction, and traffic congestion. To address this problem, triangulation-based methods can be used to obtain a spatial constraint. However, the existing methods fall short when dealing with dynamic environments and may lead the motion planner to an unrecoverable state. In this paper, we propose a new method to generate a sequence of channels across different triangulation mesh topologies to serve as the spatial constraints. This can be applied to motion planning of autonomous vehicles or robots in cluttered, unstructured environments. The proposed method is evaluated and compared with other triangulation-based methods in synthetic and complex scenarios collected from a real-world autonomous driving dataset. We have shown that the proposed method results in a more stable, long-term plan with a higher task completion rate, faster arrival time, a higher rate of successful plans, and fewer collisions compared to existing methods.
A Decoupled Uncertainty Model for MRI Segmentation Quality Estimation
Sep 06, 2021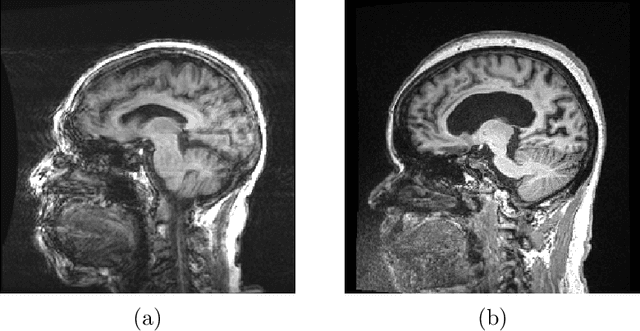
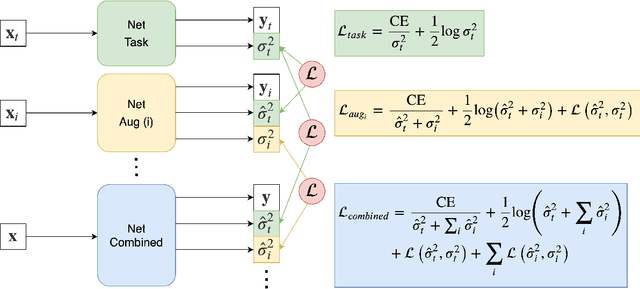
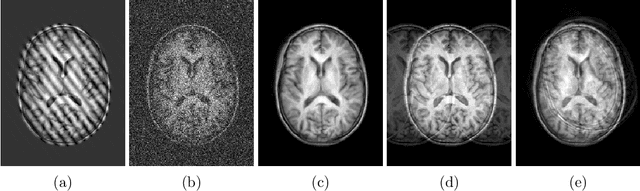
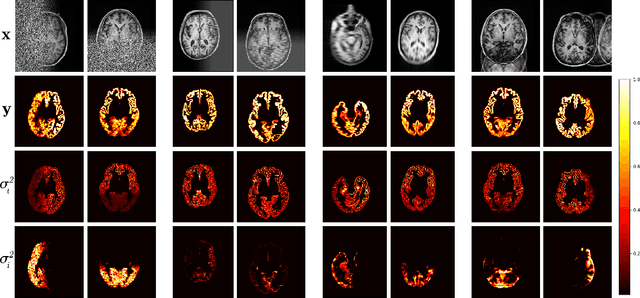
Quality control (QC) of MR images is essential to ensure that downstream analyses such as segmentation can be performed successfully. Currently, QC is predominantly performed visually and subjectively, at significant time and operator cost. We aim to automate the process using a probabilistic network that estimates segmentation uncertainty through a heteroscedastic noise model, providing a measure of task-specific quality. By augmenting training images with k-space artefacts, we propose a novel CNN architecture to decouple sources of uncertainty related to the task and different k-space artefacts in a self-supervised manner. This enables the prediction of separate uncertainties for different types of data degradation. While the uncertainty predictions reflect the presence and severity of artefacts, the network provides more robust and generalisable segmentation predictions given the quality of the data. We show that models trained with artefact augmentation provide informative measures of uncertainty on both simulated artefacts and problematic real-world images identified by human raters, both qualitatively and quantitatively in the form of error bars on volume measurements. Relating artefact uncertainty to segmentation Dice scores, we observe that our uncertainty predictions provide a better estimate of MRI quality from the point of view of the task (gray matter segmentation) compared to commonly used metrics of quality including signal-to-noise ratio (SNR) and contrast-to-noise ratio (CNR), hence providing a real-time quality metric indicative of segmentation quality.
Diversified Sampling for Batched Bayesian Optimization with Determinantal Point Processes
Oct 22, 2021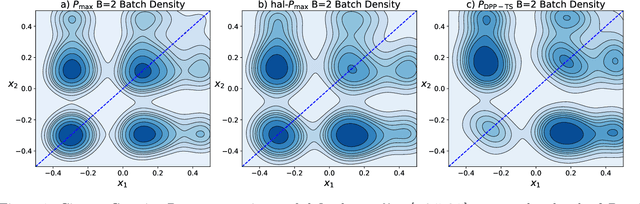
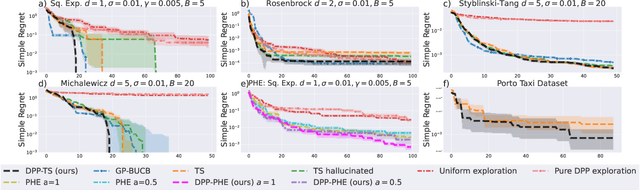
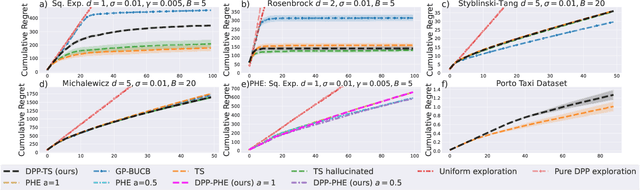
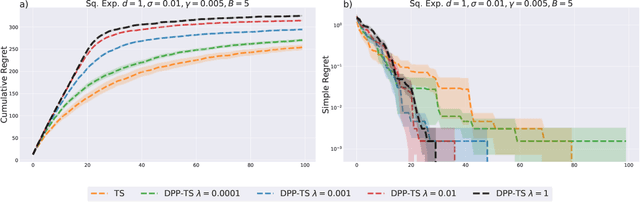
In Bayesian Optimization (BO) we study black-box function optimization with noisy point evaluations and Bayesian priors. Convergence of BO can be greatly sped up by batching, where multiple evaluations of the black-box function are performed in a single round. The main difficulty in this setting is to propose at the same time diverse and informative batches of evaluation points. In this work, we introduce DPP-Batch Bayesian Optimization (DPP-BBO), a universal framework for inducing batch diversity in sampling based BO by leveraging the repulsive properties of Determinantal Point Processes (DPP) to naturally diversify the batch sampling procedure. We illustrate this framework by formulating DPP-Thompson Sampling (DPP-TS) as a variant of the popular Thompson Sampling (TS) algorithm and introducing a Markov Chain Monte Carlo procedure to sample from it. We then prove novel Bayesian simple regret bounds for both classical batched TS as well as our counterpart DPP-TS, with the latter bound being tighter. Our real-world, as well as synthetic, experiments demonstrate improved performance of DPP-BBO over classical batching methods with Gaussian process and Cox process models.
One Proxy Device Is Enough for Hardware-Aware Neural Architecture Search
Nov 01, 2021
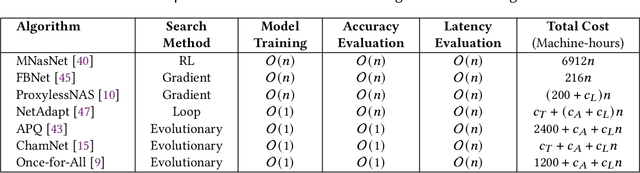
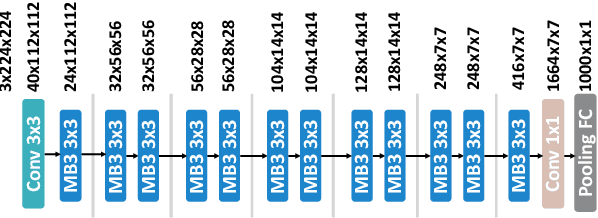

Convolutional neural networks (CNNs) are used in numerous real-world applications such as vision-based autonomous driving and video content analysis. To run CNN inference on various target devices, hardware-aware neural architecture search (NAS) is crucial. A key requirement of efficient hardware-aware NAS is the fast evaluation of inference latencies in order to rank different architectures. While building a latency predictor for each target device has been commonly used in state of the art, this is a very time-consuming process, lacking scalability in the presence of extremely diverse devices. In this work, we address the scalability challenge by exploiting latency monotonicity -- the architecture latency rankings on different devices are often correlated. When strong latency monotonicity exists, we can re-use architectures searched for one proxy device on new target devices, without losing optimality. In the absence of strong latency monotonicity, we propose an efficient proxy adaptation technique to significantly boost the latency monotonicity. Finally, we validate our approach and conduct experiments with devices of different platforms on multiple mainstream search spaces, including MobileNet-V2, MobileNet-V3, NAS-Bench-201, ProxylessNAS and FBNet. Our results highlight that, by using just one proxy device, we can find almost the same Pareto-optimal architectures as the existing per-device NAS, while avoiding the prohibitive cost of building a latency predictor for each device.
* Accepted by the ACM SIGMETRICS 2022. Published in the Proceedings of the ACM on Measurement and Analysis of Computing Systems, vol. 5, no. 3, Article 34, December 2021
A 3D Non-Stationary Geometry-Based Stochastic Model for Industrial Automation Wireless Communication Systems
Aug 14, 2021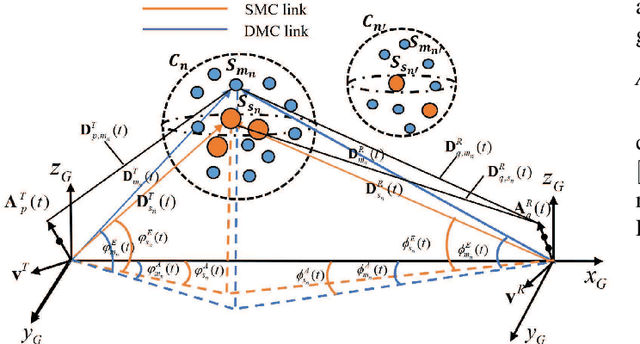
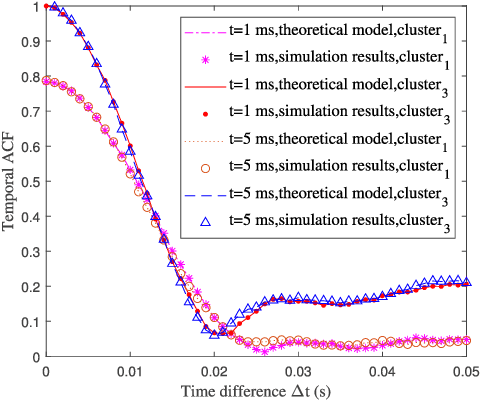
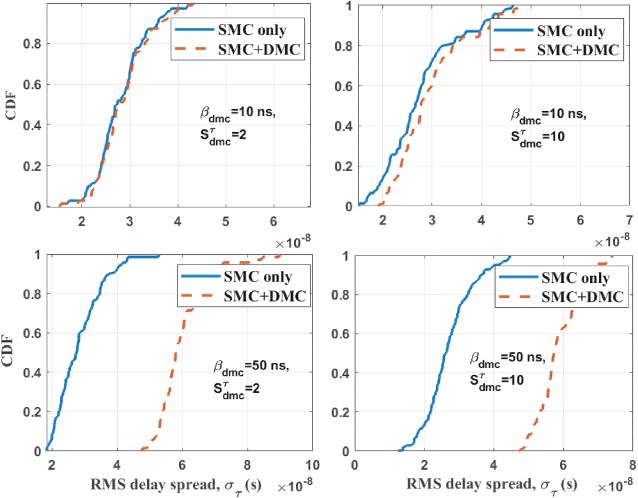
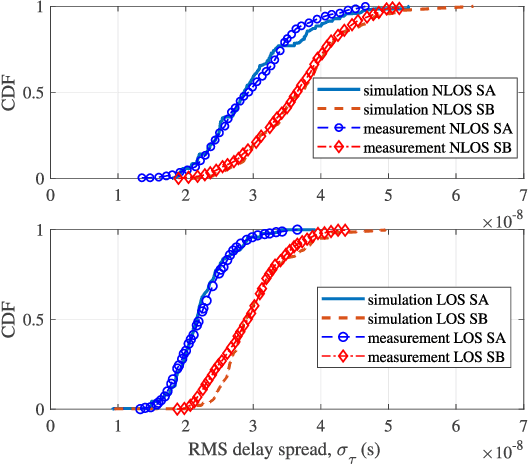
Industrial automation is one of the key application scenarios of the fifth (5G) wireless communication network. The high requirements of industrial communication systems for latency and reliability lead to the need for industrial channel models to support massive multiple-input multipleoutput (MIMO) and millimeter wave communication. In addition, due to the complex environment, huge communication equipment, and numerous metal scatterers, industrial channels have special rich dense multipath components (DMCs). Considering these characteristics, a novel three dimensional (3D) non-stationary geometry-based stochastic model (GBSM) for industrial automation wireless channel is proposed in this paper. Channel characteristics including the transfer function, time-varying space-time-frequency correlation function (STFCF), and root mean square (RMS) delay spread, model parameters including delay scaling factor and power decay factor are studied and analyzed. Besides, according to the indoor factory scenario classification of the 3rd Generation Partnership Project (3GPP) TR 38.901, two sub-scenarios considering the clutter density are simulated. Simulated cumulative distribution functions (CDFs) of RMS delay spread show a good consistency with the measurement data.
A Data-Driven Method for Recognizing Automated Negotiation Strategies
Jul 03, 2021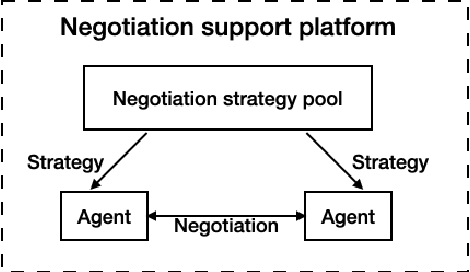
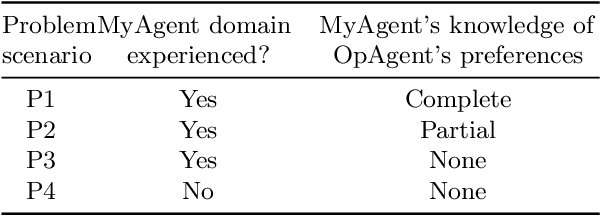
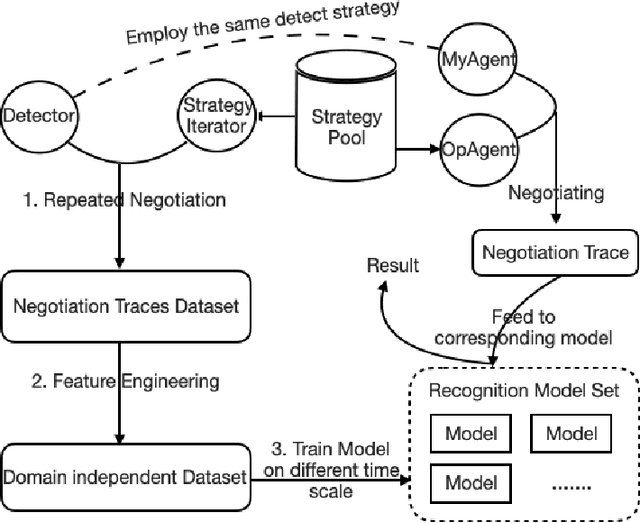
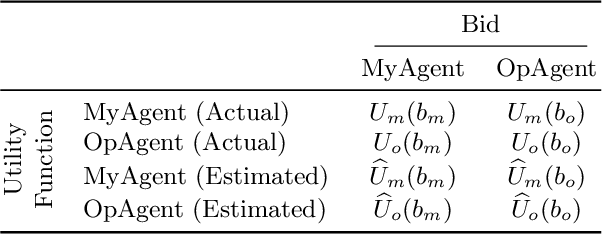
Understanding an opponent agent helps in negotiating with it. Existing works on understanding opponents focus on preference modeling (or estimating the opponent's utility function). An important but largely unexplored direction is recognizing an opponent's negotiation strategy, which captures the opponent's tactics, e.g., to be tough at the beginning but to concede toward the deadline. Recognizing complex, state-of-the-art, negotiation strategies is extremely challenging, and simple heuristics may not be adequate for this purpose. We propose a novel data-driven approach for recognizing an opponent's s negotiation strategy. Our approach includes a data generation method for an agent to generate domain-independent sequences by negotiating with a variety of opponents across domains, a feature engineering method for representing negotiation data as time series with time-step features and overall features, and a hybrid (recurrent neural network-based) deep learning method for recognizing an opponent's strategy from the time series of bids. We perform extensive experiments, spanning four problem scenarios, to demonstrate the effectiveness of our approach.