 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Consistent Relative Confidence and Label-Free Model Selection for Convolutional Neural Networks
Aug 26, 2021
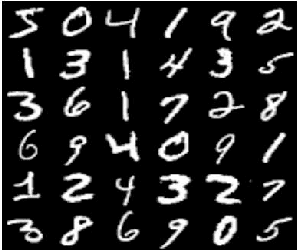
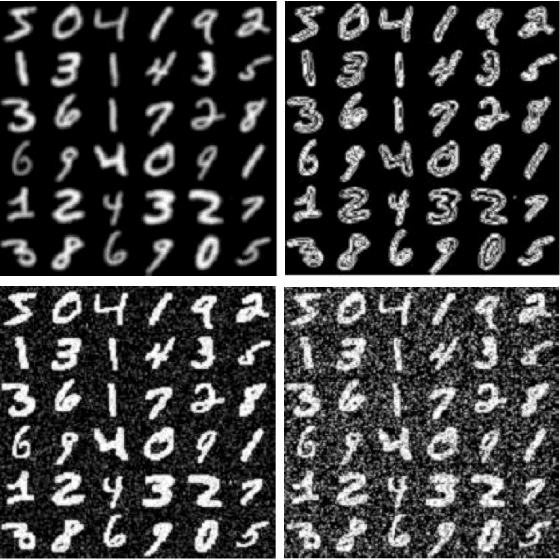
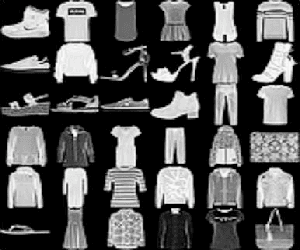
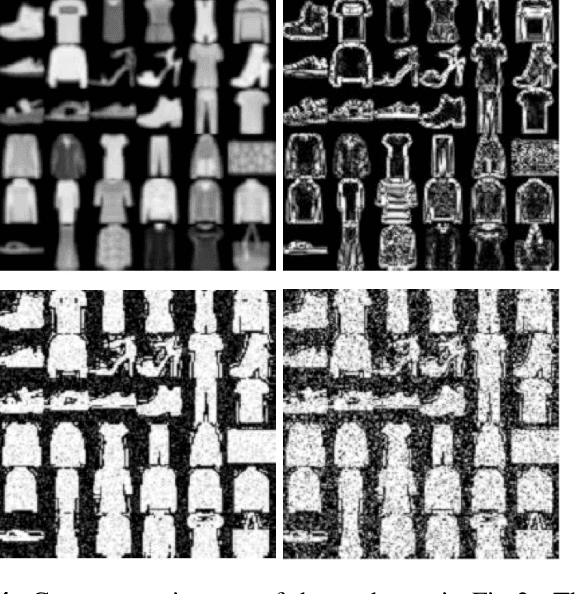
This paper is concerned with image classification based on deep convolutional neural networks (CNNs). The focus is centered around the following question: given a set of candidate CNN models, how to select the right one that has the best generalization property for the current task? Present model selection methods require access to a batch of labeled data for defining a performance metric, such as the cross-entropy loss, the classification error rate, the negative log-likelihood, and so on. In many practical cases, however, labeled data are not available in time as labeling itself is a time-consuming and expensive task. To this end, this paper presents an approach to CNN model selection using only unlabeled data. This method is developed based on a principle termed consistent relative confidence (CRC). The effectiveness and efficiency of the presented method are demonstrated by extensive experimental studies based on datasets MNIST and FasionMNIST.
BayesAoA: A Bayesian method for Computation Efficient Angle of Arrival Estimation
Oct 15, 2021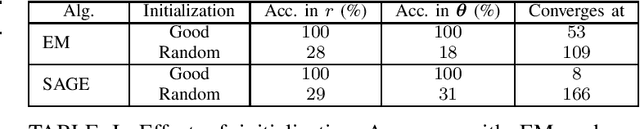
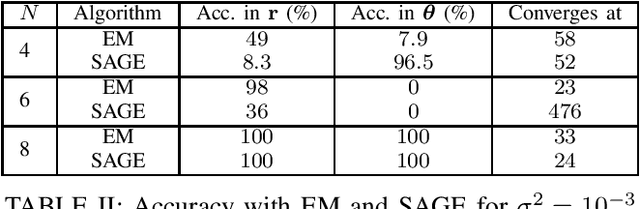
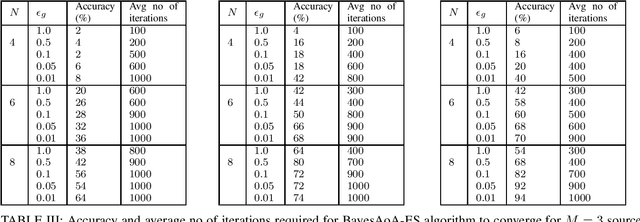

The angle of Arrival (AoA) estimation is of great interest in modern communication systems. Traditional maximum likelihood-based iterative algorithms are sensitive to initialization and cannot be used online. We propose a Bayesian method to find AoA that is insensitive towards initialization. The proposed method is less complex and needs fewer computing resources than traditional deep learning-based methods. It has a faster convergence than the brute-force methods. Further, a Hedge type solution is proposed that helps to deploy the method online to handle the situations where the channel noise and antenna configuration in the receiver change over time. The proposed method achieves $92\%$ accuracy in a channel of noise variance $10^{-6}$ with $19.3\%$ of the brute-force method's computation.
OSSEM: one-shot speaker adaptive speech enhancement using meta learning
Nov 10, 2021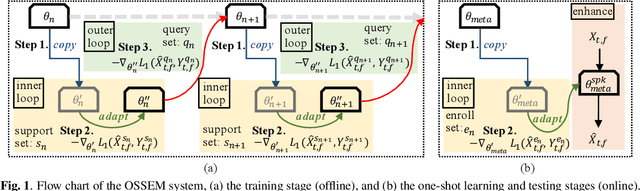
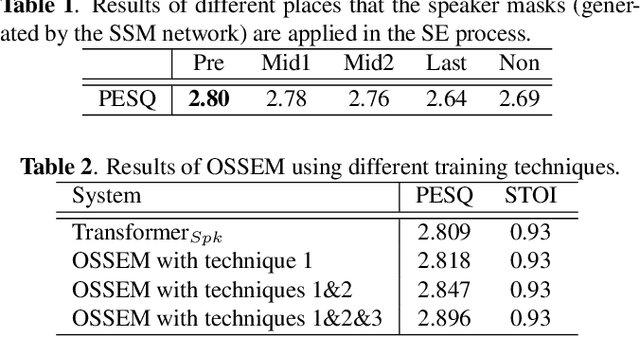
Although deep learning (DL) has achieved notable progress in speech enhancement (SE), further research is still required for a DL-based SE system to adapt effectively and efficiently to particular speakers. In this study, we propose a novel meta-learning-based speaker-adaptive SE approach (called OSSEM) that aims to achieve SE model adaptation in a one-shot manner. OSSEM consists of a modified transformer SE network and a speaker-specific masking (SSM) network. In practice, the SSM network takes an enrolled speaker embedding extracted using ECAPA-TDNN to adjust the input noisy feature through masking. To evaluate OSSEM, we designed a modified Voice Bank-DEMAND dataset, in which one utterance from the testing set was used for model adaptation, and the remaining utterances were used for testing the performance. Moreover, we set restrictions allowing the enhancement process to be conducted in real time, and thus designed OSSEM to be a causal SE system. Experimental results first show that OSSEM can effectively adapt a pretrained SE model to a particular speaker with only one utterance, thus yielding improved SE results. Meanwhile, OSSEM exhibits a competitive performance compared to state-of-the-art causal SE systems.
A Multi-criteria Approach to Evolve Sparse Neural Architectures for Stock Market Forecasting
Nov 15, 2021
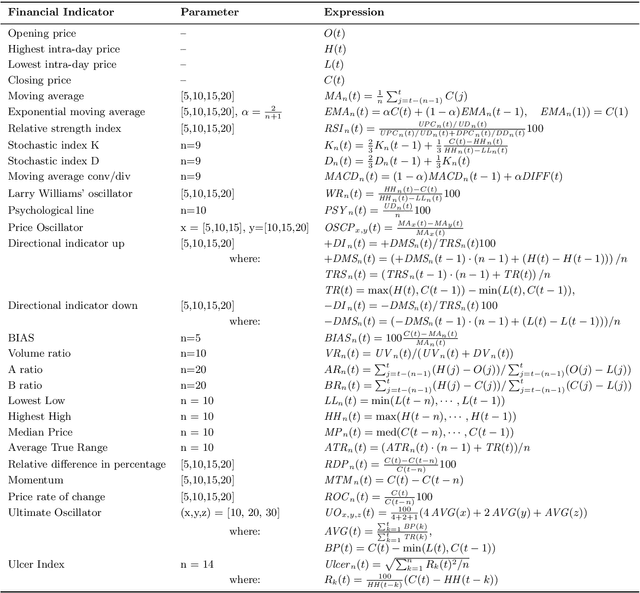
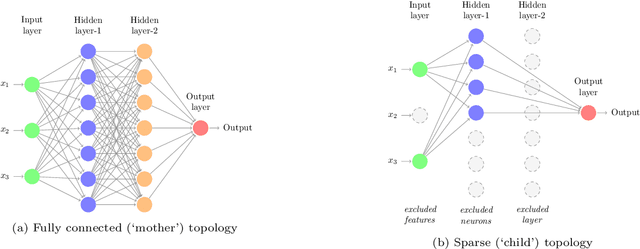
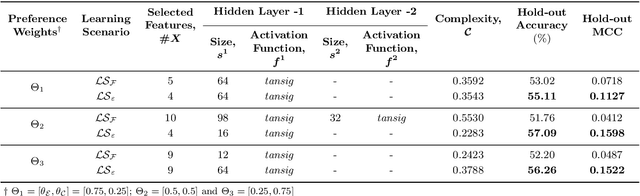
This study proposes a new framework to evolve efficacious yet parsimonious neural architectures for the movement prediction of stock market indices using technical indicators as inputs. In the light of a sparse signal-to-noise ratio under the Efficient Market hypothesis, developing machine learning methods to predict the movement of a financial market using technical indicators has shown to be a challenging problem. To this end, the neural architecture search is posed as a multi-criteria optimization problem to balance the efficacy with the complexity of architectures. In addition, the implications of different dominant trading tendencies which may be present in the pre-COVID and within-COVID time periods are investigated. An $\epsilon-$ constraint framework is proposed as a remedy to extract any concordant information underlying the possibly conflicting pre-COVID data. Further, a new search paradigm, Two-Dimensional Swarms (2DS) is proposed for the multi-criteria neural architecture search, which explicitly integrates sparsity as an additional search dimension in particle swarms. A detailed comparative evaluation of the proposed approach is carried out by considering genetic algorithm and several combinations of empirical neural design rules with a filter-based feature selection method (mRMR) as baseline approaches. The results of this study convincingly demonstrate that the proposed approach can evolve parsimonious networks with better generalization capabilities.
High-dimensional Bayesian Optimization for CNN Auto Pruning with Clustering and Rollback
Sep 22, 2021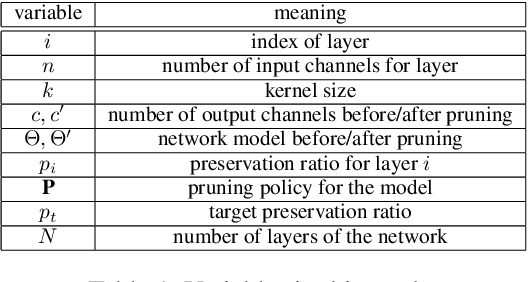
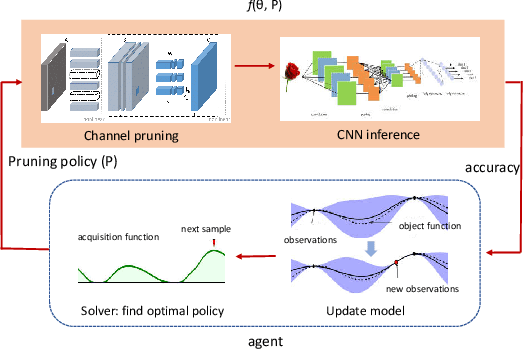
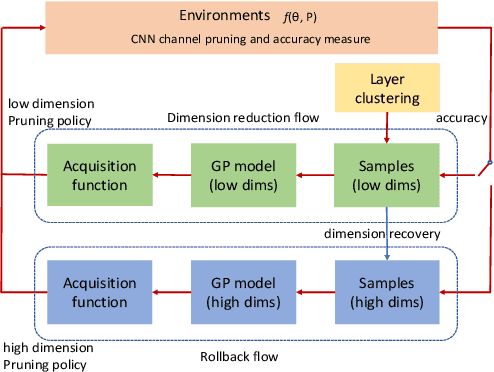
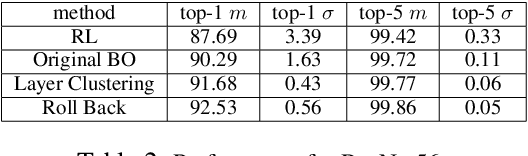
Pruning has been widely used to slim convolutional neural network (CNN) models to achieve a good trade-off between accuracy and model size so that the pruned models become feasible for power-constrained devices such as mobile phones. This process can be automated to avoid the expensive hand-crafted efforts and to explore a large pruning space automatically so that the high-performance pruning policy can be achieved efficiently. Nowadays, reinforcement learning (RL) and Bayesian optimization (BO)-based auto pruners are widely used due to their solid theoretical foundation, universality, and high compressing quality. However, the RL agent suffers from long training times and high variance of results, while the BO agent is time-consuming for high-dimensional design spaces. In this work, we propose an enhanced BO agent to obtain significant acceleration for auto pruning in high-dimensional design spaces. To achieve this, a novel clustering algorithm is proposed to reduce the dimension of the design space to speedup the searching process. Then, a roll-back algorithm is proposed to recover the high-dimensional design space so that higher pruning accuracy can be obtained. We validate our proposed method on ResNet, MobileNet, and VGG models, and our experiments show that the proposed method significantly improves the accuracy of BO when pruning very deep CNN models. Moreover, our method achieves lower variance and shorter time than the RL-based counterpart.
Distributed Swarm Collision Avoidance Based on Angular Calculations
Aug 29, 2021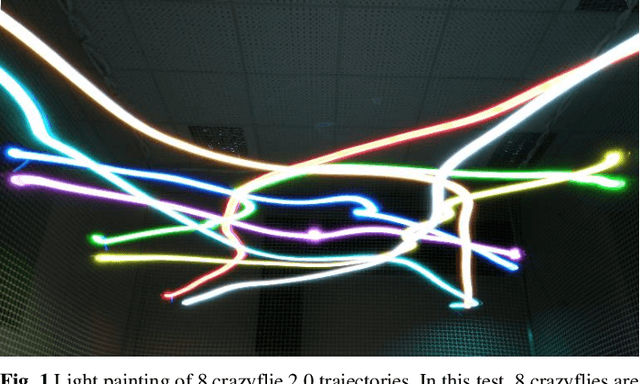
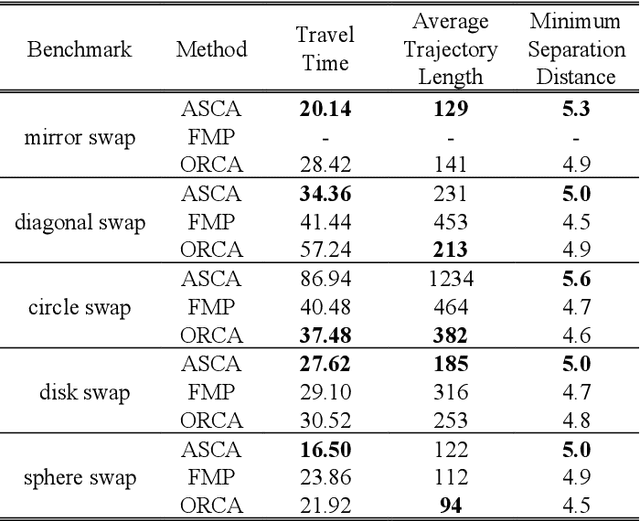
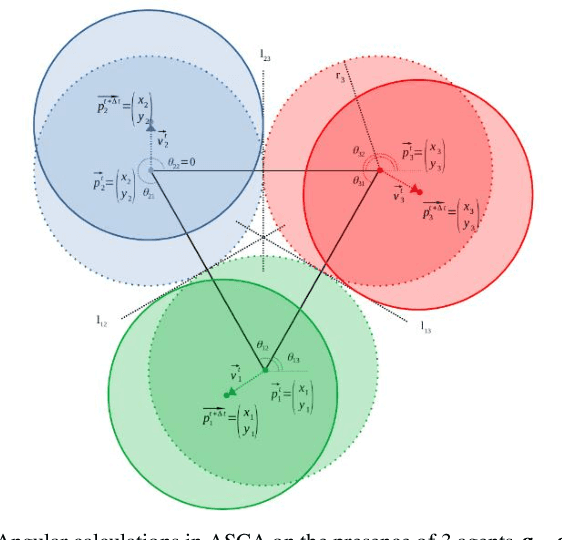
Collision avoidance is one of the most important topics in the robotics field. The goal is to move the robots from initial locations to target locations such that they follow shortest non-colliding paths in the shortest time and with the least amount of energy. In this paper, a distributed and real-time algorithm for dense and complex 2D and 3D environments is proposed. This algorithm uses angular calculations to select the optimal direction for the movement of each robot and it has been shown that these separate calculations lead to a form of cooperative behavior among agents. We evaluated the proposed approach on various simulation and experimental scenarios and compared the results with FMP and ORCA, two important algorithms in this field. The results show that the proposed approach is at least 25% faster than ORCA and at least 7% faster than FMP and also more reliable than both methods. The proposed method is shown to enable fully autonomous navigation of a swarm of crazyflies.
DECAF: Generating Fair Synthetic Data Using Causally-Aware Generative Networks
Nov 04, 2021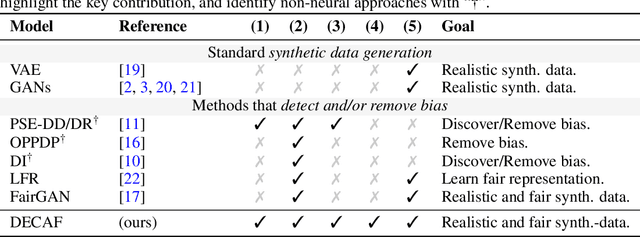
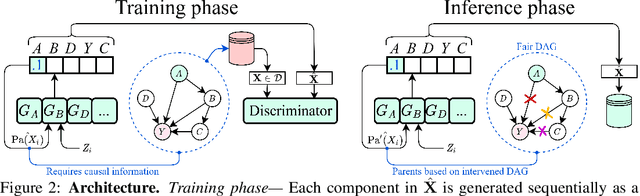
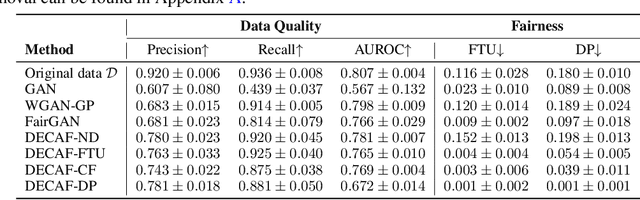
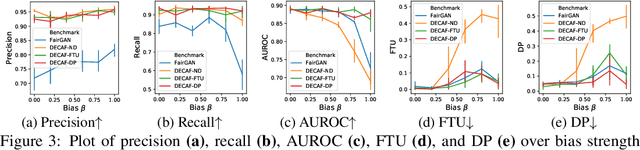
Machine learning models have been criticized for reflecting unfair biases in the training data. Instead of solving for this by introducing fair learning algorithms directly, we focus on generating fair synthetic data, such that any downstream learner is fair. Generating fair synthetic data from unfair data - while remaining truthful to the underlying data-generating process (DGP) - is non-trivial. In this paper, we introduce DECAF: a GAN-based fair synthetic data generator for tabular data. With DECAF we embed the DGP explicitly as a structural causal model in the input layers of the generator, allowing each variable to be reconstructed conditioned on its causal parents. This procedure enables inference time debiasing, where biased edges can be strategically removed for satisfying user-defined fairness requirements. The DECAF framework is versatile and compatible with several popular definitions of fairness. In our experiments, we show that DECAF successfully removes undesired bias and - in contrast to existing methods - is capable of generating high-quality synthetic data. Furthermore, we provide theoretical guarantees on the generator's convergence and the fairness of downstream models.
Data-driven estimation of system norms via impulse response
Nov 04, 2021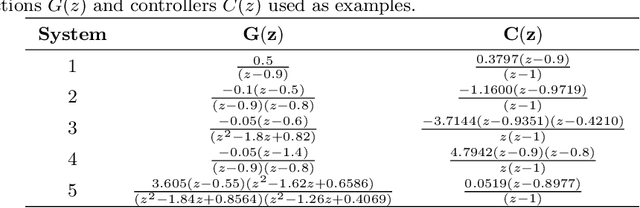
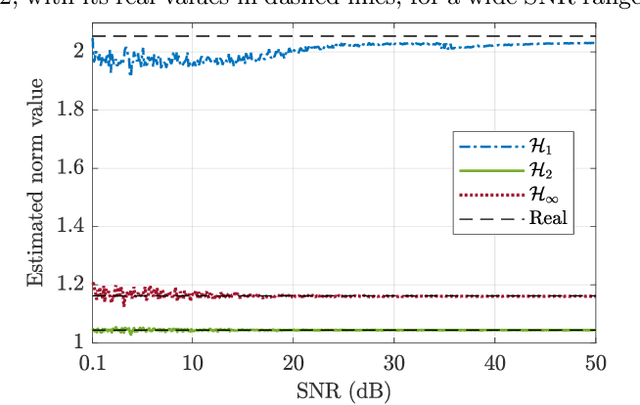
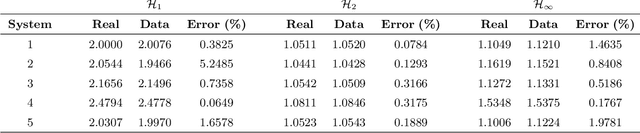
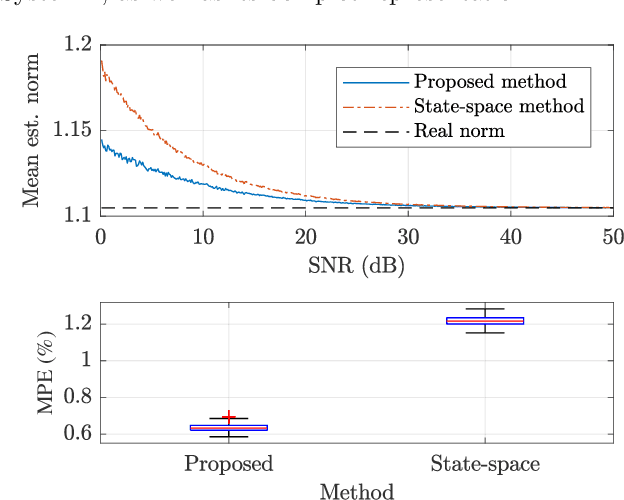
This paper proposes a method for estimating the norms of a system in a pure data-driven fashion based on their identified Impulse Response (IR) coefficients. The calculation of norms is briefly reviewed and the main expressions for the IR-based estimations are presented. As a case study, the $\mathcal{H}_{1}$, $\mathcal{H}_2$, and $\mathcal{H}_{\infty}$ norms of the sensitivity transfer function of five different discrete-time closed-loop systems are estimated for a Signal-to-Noise-Ratio (SNR) of 10 dB, achieving low percent error values if compared to the real value. To verify the influence of the noise amplitude, norms are estimated considering a wide range of SNR values, for a specific system, presenting low Mean Percent Error (MPE) if compared to the real norms. The proposed technique is also compared to an existing state-space-based method in terms of $\mathcal{H}_{\infty}$, through Monte Carlo, showing a reduction of approximately 48 % in the MPE for a wide range of SNR values.
Burst Imaging for Light-Constrained Structure-From-Motion
Aug 23, 2021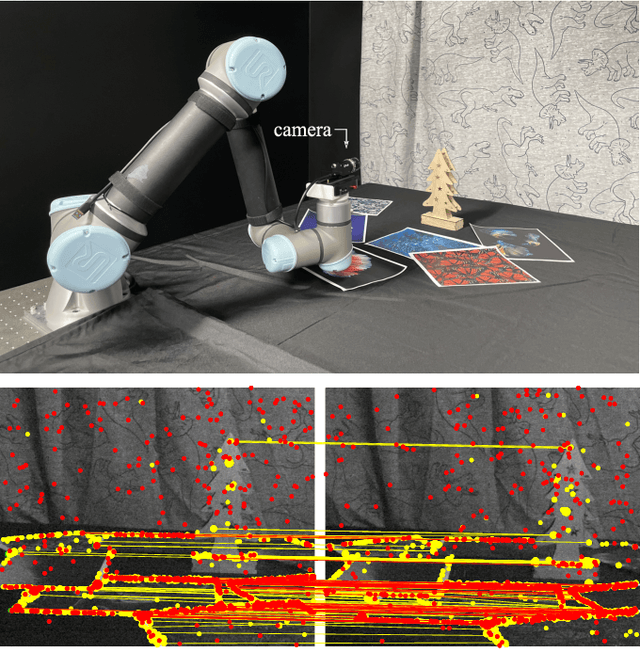
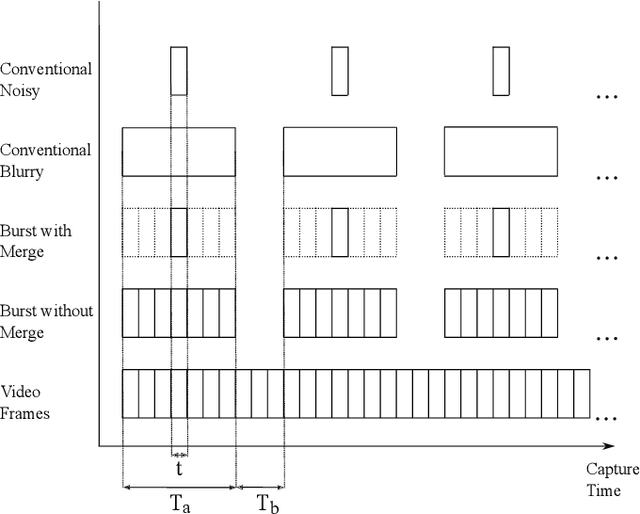
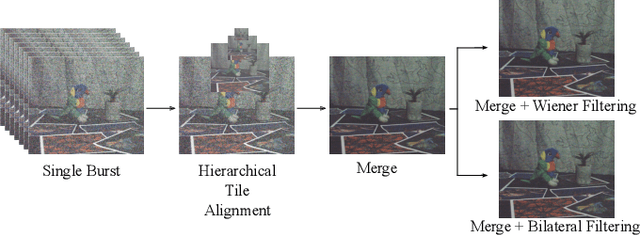
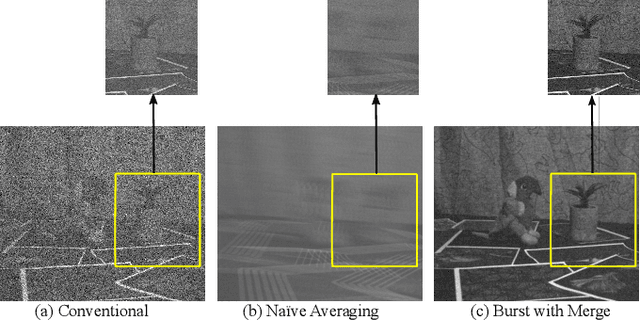
Images captured under extremely low light conditions are noise-limited, which can cause existing robotic vision algorithms to fail. In this paper we develop an image processing technique for aiding 3D reconstruction from images acquired in low light conditions. Our technique, based on burst photography, uses direct methods for image registration within bursts of short exposure time images to improve the robustness and accuracy of feature-based structure-from-motion (SfM). We demonstrate improved SfM performance in challenging light-constrained scenes, including quantitative evaluations that show improved feature performance and camera pose estimates. Additionally, we show that our method converges more frequently to correct reconstructions than the state-of-the-art. Our method is a significant step towards allowing robots to operate in low light conditions, with potential applications to robots operating in environments such as underground mines and night time operation.
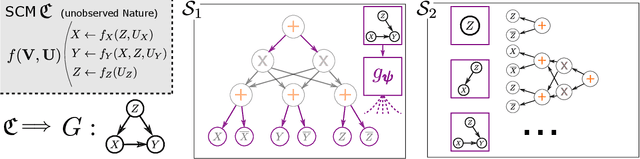
On the Tractability of Neural Causal Inference
Oct 22, 2021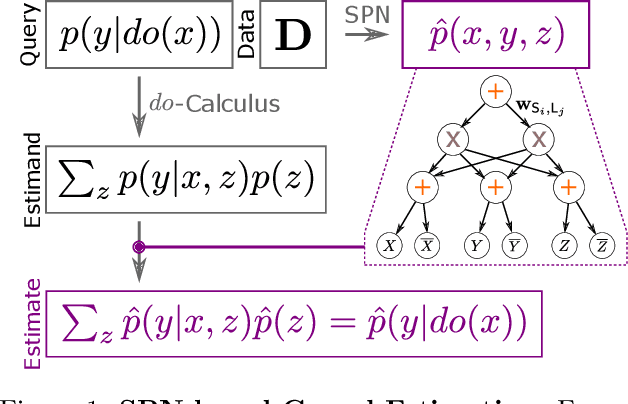

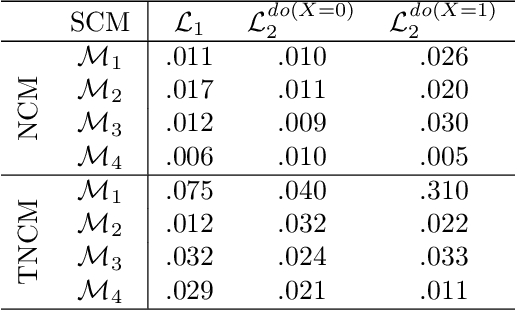
Roth (1996) proved that any form of marginal inference with probabilistic graphical models (e.g. Bayesian Networks) will at least be NP-hard. Introduced and extensively investigated in the past decade, the neural probabilistic circuits known as sum-product network (SPN) offers linear time complexity. On another note, research around neural causal models (NCM) recently gained traction, demanding a tighter integration of causality for machine learning. To this end, we present a theoretical investigation of if, when, how and under what cost tractability occurs for different NCM. We prove that SPN-based causal inference is generally tractable, opposed to standard MLP-based NCM. We further introduce a new tractable NCM-class that is efficient in inference and fully expressive in terms of Pearl's Causal Hierarchy. Our comparative empirical illustration on simulations and standard benchmarks validates our theoretical proofs.