 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
The Neural MMO Platform for Massively Multiagent Research
Oct 14, 2021
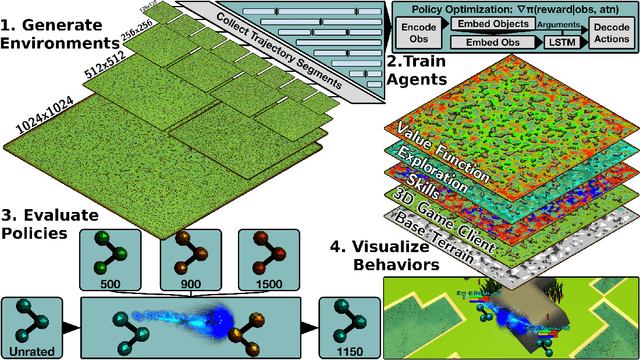
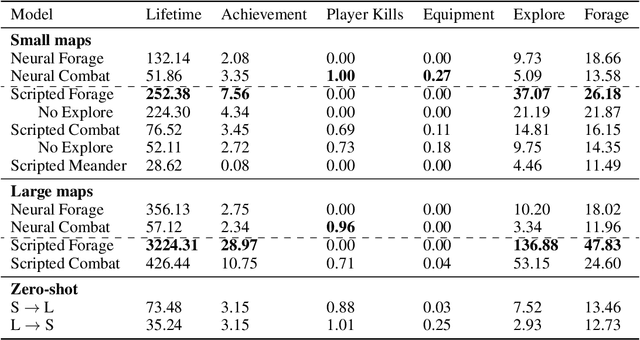
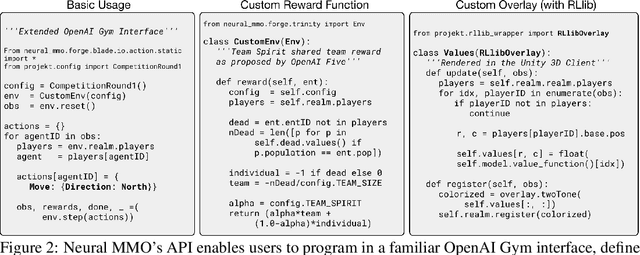

Neural MMO is a computationally accessible research platform that combines large agent populations, long time horizons, open-ended tasks, and modular game systems. Existing environments feature subsets of these properties, but Neural MMO is the first to combine them all. We present Neural MMO as free and open source software with active support, ongoing development, documentation, and additional training, logging, and visualization tools to help users adapt to this new setting. Initial baselines on the platform demonstrate that agents trained in large populations explore more and learn a progression of skills. We raise other more difficult problems such as many-team cooperation as open research questions which Neural MMO is well-suited to answer. Finally, we discuss current limitations of the platform, potential mitigations, and plans for continued development.
sMGC: A Complex-Valued Graph Convolutional Network via Magnetic Laplacian for Directed Graphs
Oct 14, 2021
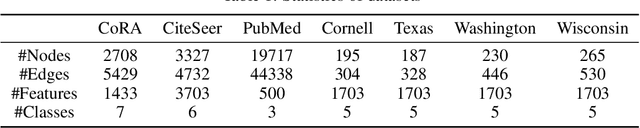
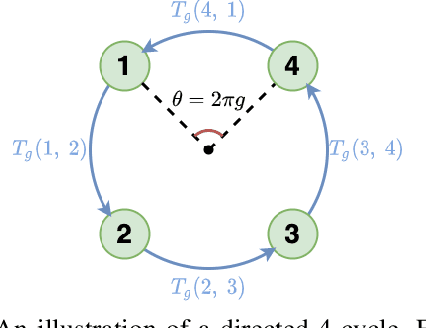
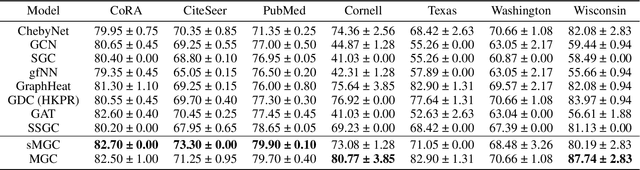
Recent advancements in Graph Neural Networks have led to state-of-the-art performance on representation learning of graphs for node classification. However, the majority of existing works process directed graphs by symmetrization, which may cause loss of directional information. In this paper, we propose the magnetic Laplacian that preserves edge directionality by encoding it into complex phase as a deformation of the combinatorial Laplacian. In addition, we design an Auto-Regressive Moving-Average (ARMA) filter that is capable of learning global features from graphs. To reduce time complexity, Taylor expansion is applied to approximate the filter. We derive complex-valued operations in graph neural network and devise a simplified Magnetic Graph Convolution network, namely sMGC. Our experiment results demonstrate that sMGC is a fast, powerful, and widely applicable GNN.
Bayesian inference of the climbing grade scale
Nov 15, 2021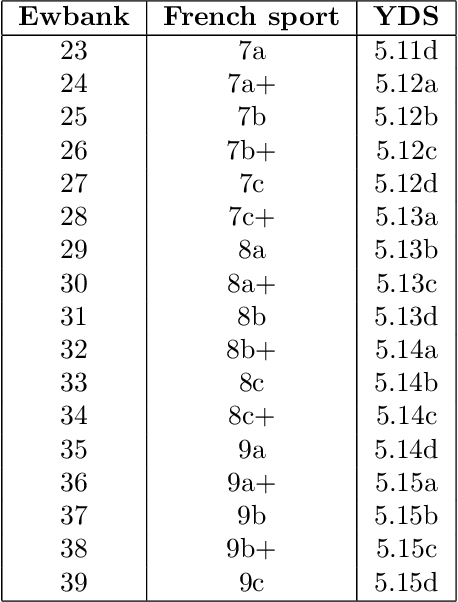
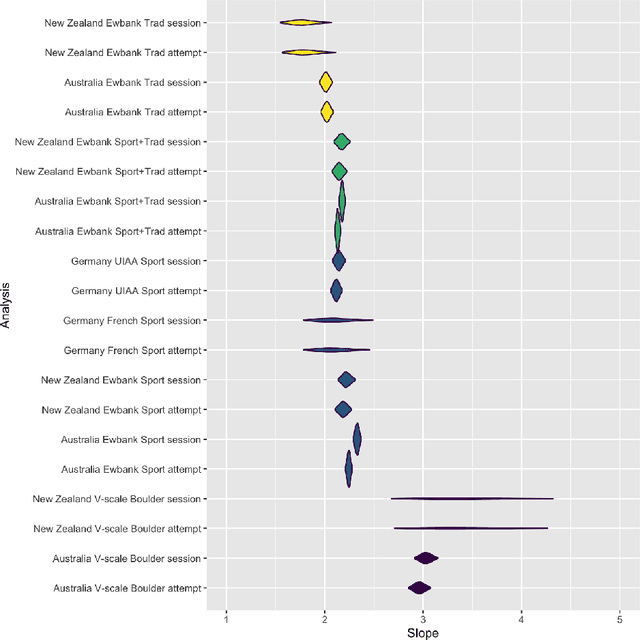
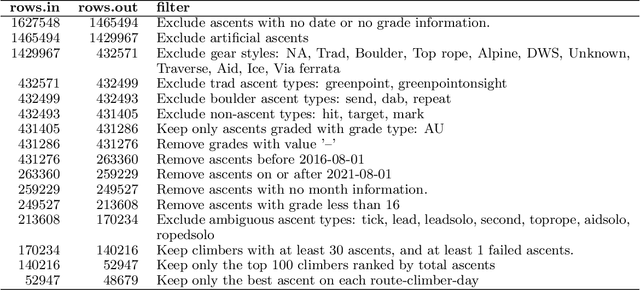
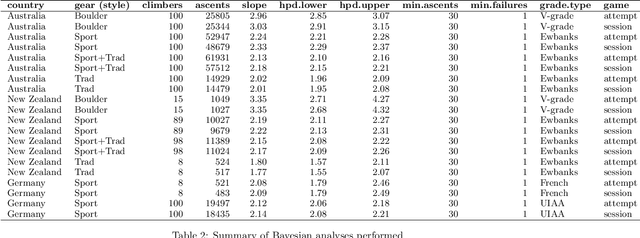
Climbing grades are used to classify a climbing route based on its perceived difficulty, and have come to play a central role in the sport of rock climbing. Recently, the first statistically rigorous method for estimating climbing grades from whole-history ascent data was described, based on the dynamic Bradley-Terry model for games between players of time-varying ability. In this paper, we implement inference under the whole-history rating model using Markov chain Monte Carlo and apply the method to a curated data set made up of climbers who climb regularly. We use these data to get an estimate of the model's fundamental scale parameter m, which defines the proportional increase in difficulty associated with an increment of grade. We show that the data conform to assumptions that the climbing grade scale is a logarithmic scale of difficulty, like decibels or stellar magnitude. We estimate that an increment in Ewbank, French and UIAA climbing grade systems corresponds to 2.1, 2.09 and 2.13 times increase in difficulty respectively, assuming a logistic model of probability of success as a function of grade. Whereas we find that the Vermin scale for bouldering (V-grade scale) corresponds to a 3.17 increase in difficulty per grade increment. In addition, we highlight potential connections between the logarithmic properties of climbing grade scales and the psychophysical laws of Weber and Fechner.
Asynchronous Collaborative Localization by Integrating Spatiotemporal Graph Learning with Model-Based Estimation
Nov 05, 2021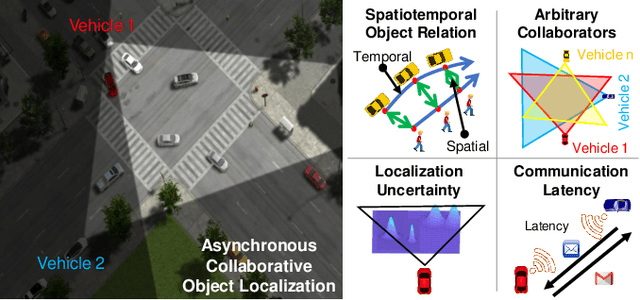
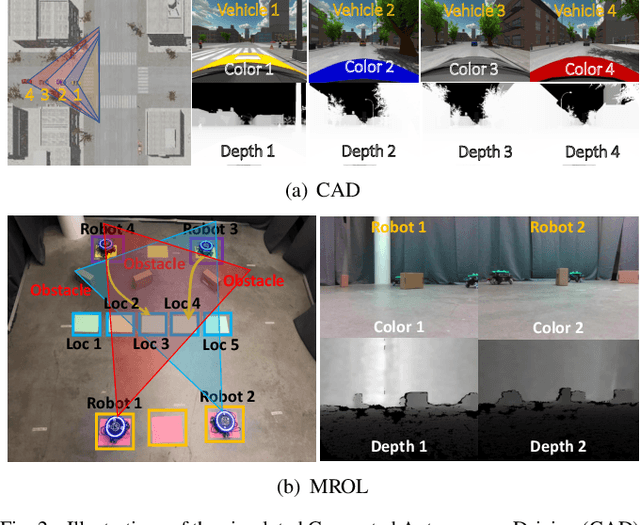
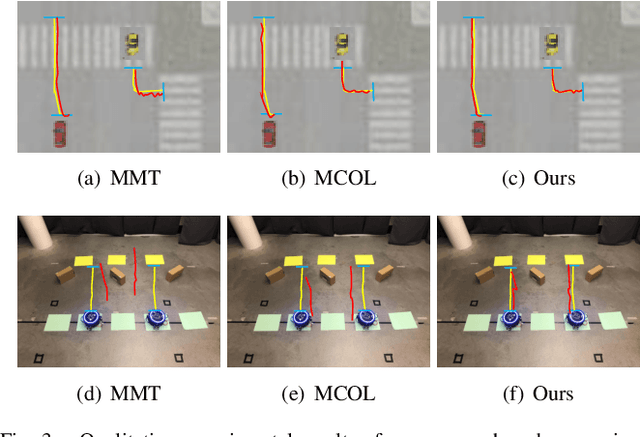
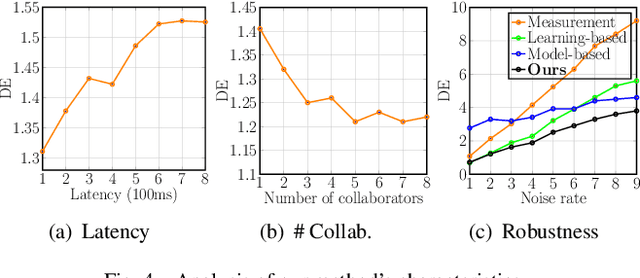
Collaborative localization is an essential capability for a team of robots such as connected vehicles to collaboratively estimate object locations from multiple perspectives with reliant cooperation. To enable collaborative localization, four key challenges must be addressed, including modeling complex relationships between observed objects, fusing observations from an arbitrary number of collaborating robots, quantifying localization uncertainty, and addressing latency of robot communications. In this paper, we introduce a novel approach that integrates uncertainty-aware spatiotemporal graph learning and model-based state estimation for a team of robots to collaboratively localize objects. Specifically, we introduce a new uncertainty-aware graph learning model that learns spatiotemporal graphs to represent historical motions of the objects observed by each robot over time and provides uncertainties in object localization. Moreover, we propose a novel method for integrated learning and model-based state estimation, which fuses asynchronous observations obtained from an arbitrary number of robots for collaborative localization. We evaluate our approach in two collaborative object localization scenarios in simulations and on real robots. Experimental results show that our approach outperforms previous methods and achieves state-of-the-art performance on asynchronous collaborative localization.
CPPNet: A Coverage Path Planning Network
Aug 03, 2021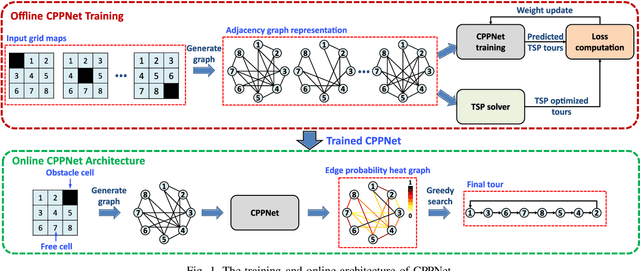
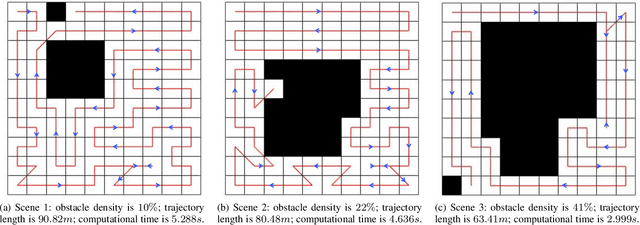
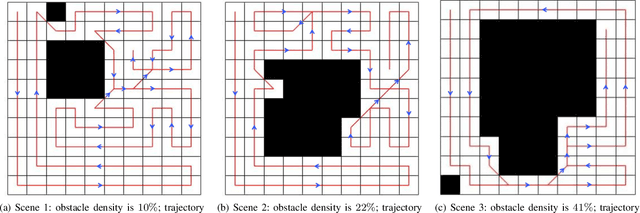
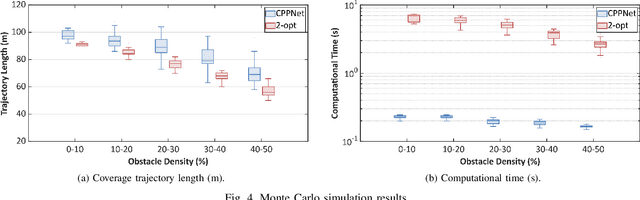
This paper presents a deep-learning based CPP algorithm, called Coverage Path Planning Network (CPPNet). CPPNet is built using a convolutional neural network (CNN) whose input is a graph-based representation of the occupancy grid map while its output is an edge probability heat graph, where the value of each edge is the probability of belonging to the optimal TSP tour. Finally, a greedy search is used to select the final optimized tour. CPPNet is trained and comparatively evaluated against the TSP tour. It is shown that CPPNet provides near-optimal solutions while requiring significantly less computational time, thus enabling real-time coverage path planning in partially unknown and dynamic environments.
Time-Dynamic Estimates of the Reliability of Deep Semantic Segmentation Networks
Nov 12, 2019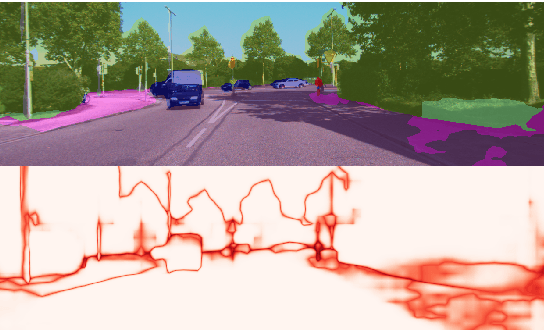
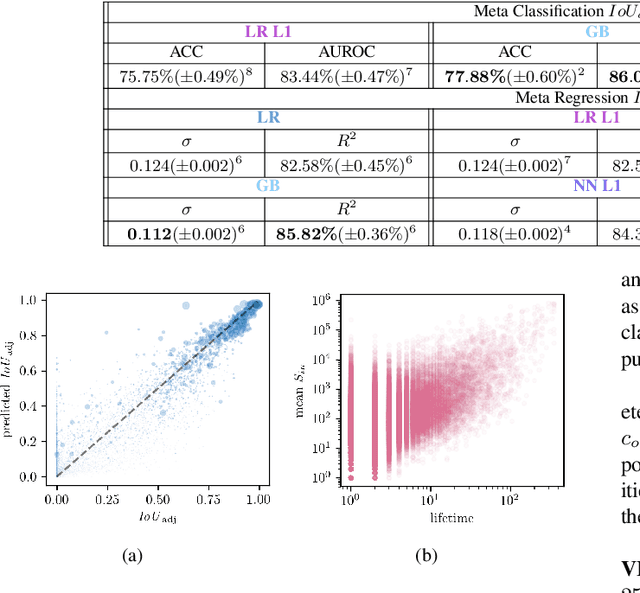
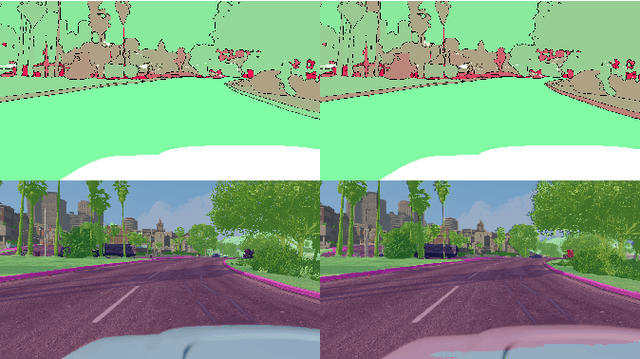
In the semantic segmentation of street scenes, the reliability of a prediction is of highest interest. The assessment of neural networks by means of uncertainties is a common ansatz to prevent safety issues. As in online applications like automated driving, a video stream of images is available, we present a time-dynamical approach to investigate uncertainties and assess the prediction quality of neural networks.To this end, we track segments over time and gather aggregated metrics per segment, e.g. mean dispersion metrics derived from the softmax output and segment sizes. Due to identifying segments over consecutive frames, we obtain time series of metrics from which we assess prediction quality. We do so by either classifying between intersection over union (IoU) = 0 and IoU > 0 (meta classification) or predicting the IoU directly (meta regression). In our tests, we analyze the influence of the length of the time series on the predictive power of metrics and study different models for meta classification and regression. We use two publicly available DeepLabv3+ networks as well as two street scene datasets, i.e., VIPER as a synthetic one and KITTI based on real data. We achieve classification accuracies of up to 81.20% and AUROC values of up to 88.68% for the task of meta classification. For meta regression we obtain $R^2$ values of up to 87.51%. We show that these results yield improvements compared to other approaches.
One-Shot Transfer Learning of Physics-Informed Neural Networks
Oct 21, 2021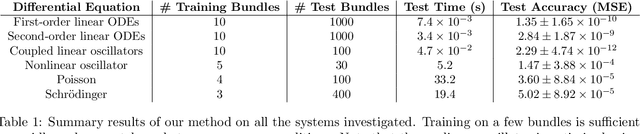
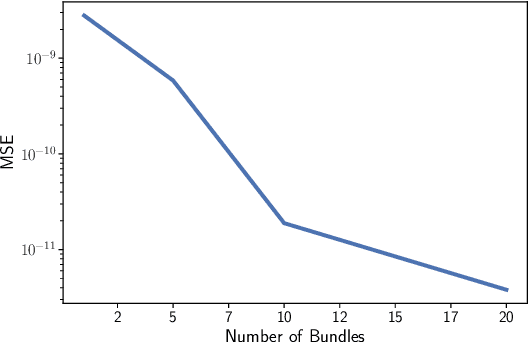
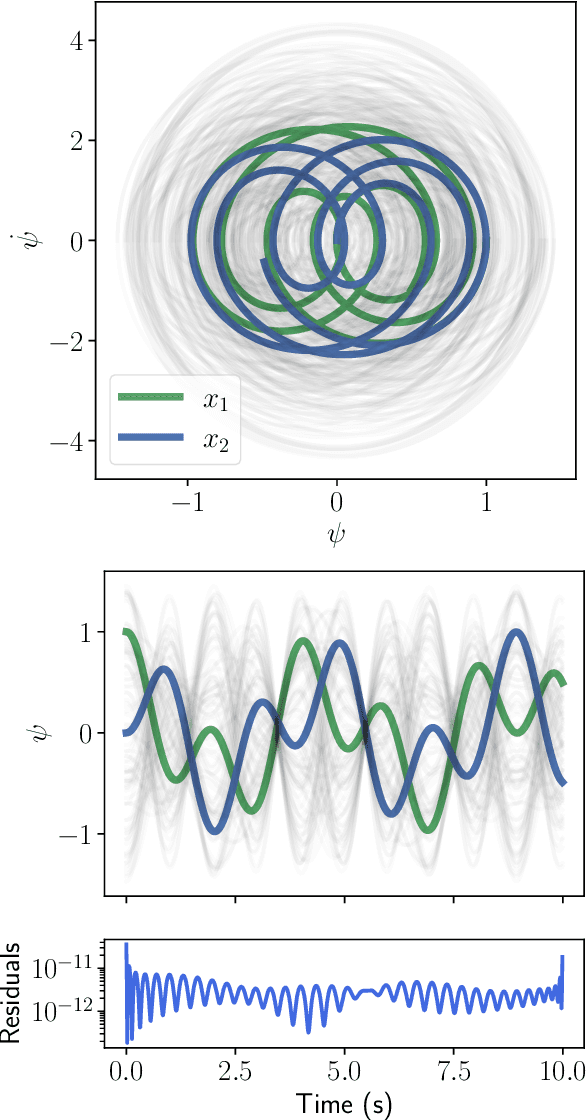
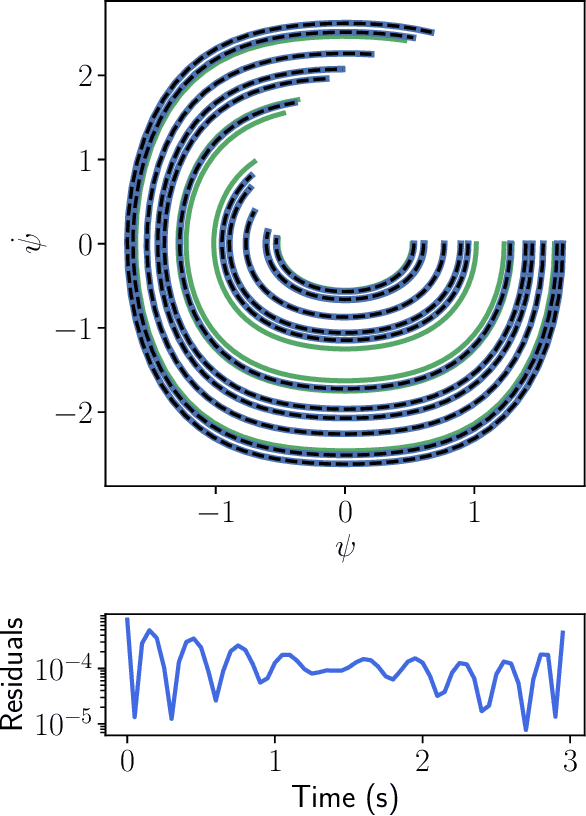
Solving differential equations efficiently and accurately sits at the heart of progress in many areas of scientific research, from classical dynamical systems to quantum mechanics. There is a surge of interest in using Physics-Informed Neural Networks (PINNs) to tackle such problems as they provide numerous benefits over traditional numerical approaches. Despite their potential benefits for solving differential equations, transfer learning has been under explored. In this study, we present a general framework for transfer learning PINNs that results in one-shot inference for linear systems of both ordinary and partial differential equations. This means that highly accurate solutions to many unknown differential equations can be obtained instantaneously without retraining an entire network. We demonstrate the efficacy of the proposed deep learning approach by solving several real-world problems, such as first- and second-order linear ordinary equations, the Poisson equation, and the time-dependent Schrodinger complex-value partial differential equation.
Contraction Theory for Nonlinear Stability Analysis and Learning-based Control: A Tutorial Overview
Oct 01, 2021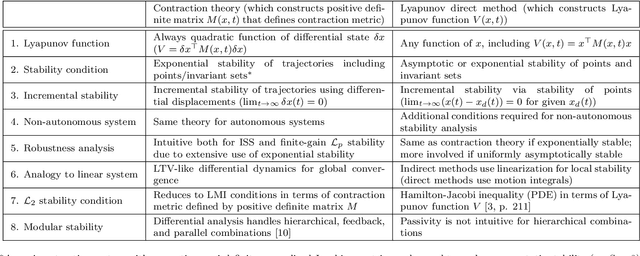
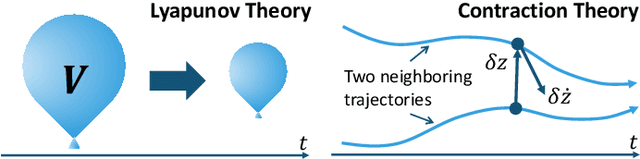
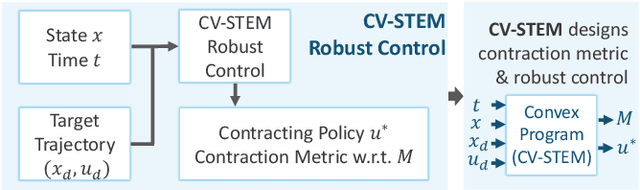
Contraction theory is an analytical tool to study differential dynamics of a non-autonomous (i.e., time-varying) nonlinear system under a contraction metric defined with a uniformly positive definite matrix, the existence of which results in a necessary and sufficient characterization of incremental exponential stability of multiple solution trajectories with respect to each other. By using a squared differential length as a Lyapunov-like function, its nonlinear stability analysis boils down to finding a suitable contraction metric that satisfies a stability condition expressed as a linear matrix inequality, indicating that many parallels can be drawn between well-known linear systems theory and contraction theory for nonlinear systems. Furthermore, contraction theory takes advantage of a superior robustness property of exponential stability used in conjunction with the comparison lemma. This yields much-needed safety and stability guarantees for neural network-based control and estimation schemes, without resorting to a more involved method of using uniform asymptotic stability for input-to-state stability. Such distinctive features permit systematic construction of a contraction metric via convex optimization, thereby obtaining an explicit exponential bound on the distance between a time-varying target trajectory and solution trajectories perturbed externally due to disturbances and learning errors. The objective of this paper is therefore to present a tutorial overview of contraction theory and its advantages in nonlinear stability analysis of deterministic and stochastic systems, with an emphasis on deriving formal robustness and stability guarantees for various learning-based and data-driven automatic control methods. In particular, we provide a detailed review of techniques for finding contraction metrics and associated control and estimation laws using deep neural networks.
Deep learning approaches to Earth Observation change detection
Jul 13, 2021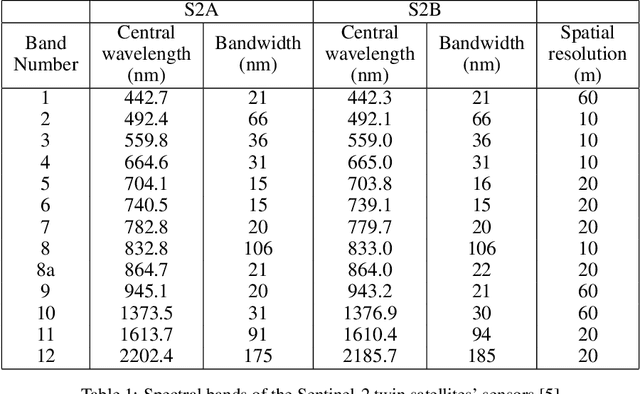
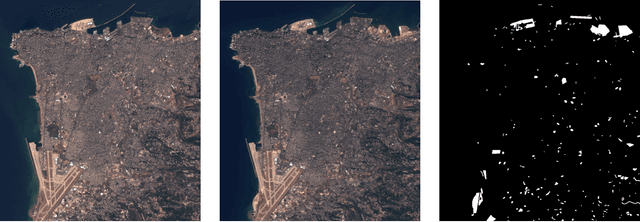


The interest for change detection in the field of remote sensing has increased in the last few years. Searching for changes in satellite images has many useful applications, ranging from land cover and land use analysis to anomaly detection. In particular, urban change detection provides an efficient tool to study urban spread and growth through several years of observation. At the same time, change detection is often a computationally challenging and time-consuming task, which requires innovative methods to guarantee optimal results with unquestionable value and within reasonable time. In this paper we present two different approaches to change detection (semantic segmentation and classification) that both exploit convolutional neural networks to achieve good results, which can be further refined and used in a post-processing workflow for a large variety of applications.
Detection of Driver Drowsiness by Calculating the Speed of Eye Blinking
Oct 21, 2021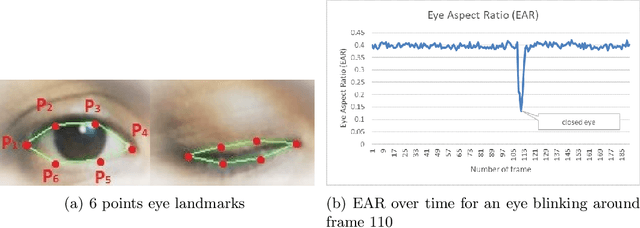
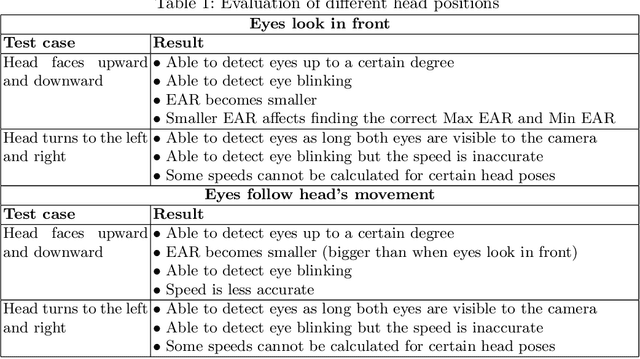
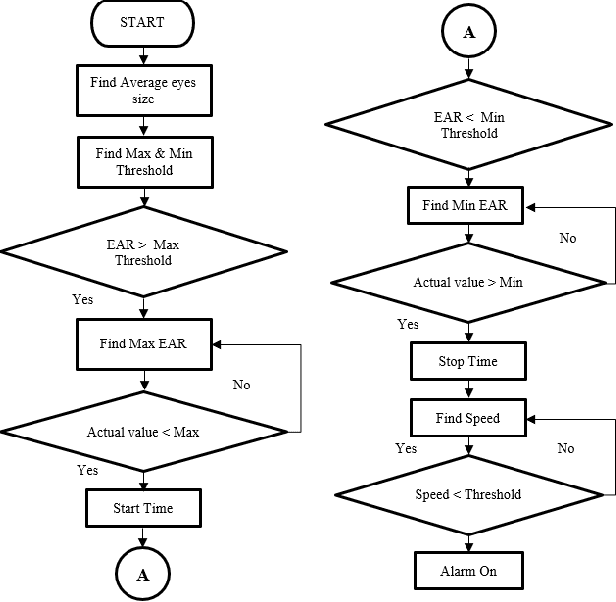
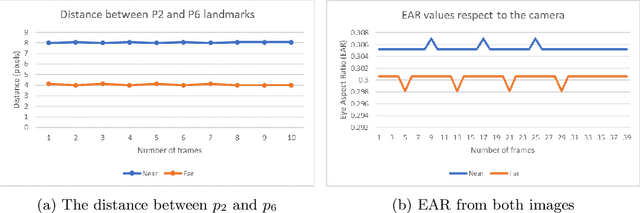
Many road accidents are caused by drowsiness of the driver. While there are methods to detect closed eyes, it is a non-trivial task to detect the gradual process of a driver becoming drowsy. We consider a simple real-time detection system for drowsiness merely based on the eye blinking rate derived from the eye aspect ratio. For the eye detection we use HOG and a linear SVM. If the speed of the eye blinking drops below some empirically determined threshold, the system triggers an alarm, hence preventing the driver from falling into microsleep. In this paper, we extensively evaluate the minimal requirements for the proposed system. We find that this system works well if the face is directed to the camera, but it becomes less reliable once the head is tilted significantly. The results of our evaluations provide the foundation for further developments of our drowsiness detection system.