 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Blaschke Product Neural Networks (BPNN): A Physics-Infused Neural Network for Phase Retrieval of Meromorphic Functions
Nov 26, 2021
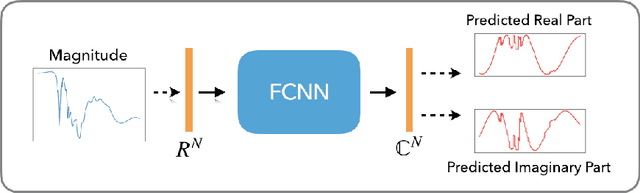

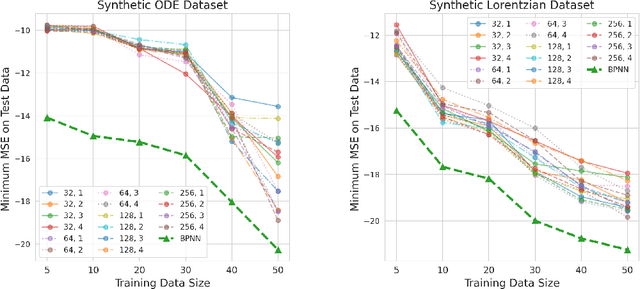
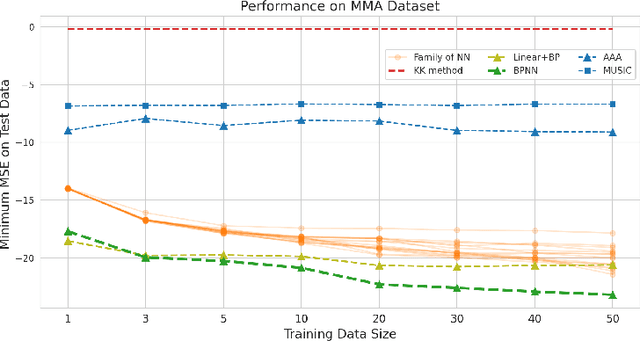
Numerous physical systems are described by ordinary or partial differential equations whose solutions are given by holomorphic or meromorphic functions in the complex domain. In many cases, only the magnitude of these functions are observed on various points on the purely imaginary jw-axis since coherent measurement of their phases is often expensive. However, it is desirable to retrieve the lost phases from the magnitudes when possible. To this end, we propose a physics-infused deep neural network based on the Blaschke products for phase retrieval. Inspired by the Helson and Sarason Theorem, we recover coefficients of a rational function of Blaschke products using a Blaschke Product Neural Network (BPNN), based upon the magnitude observations as input. The resulting rational function is then used for phase retrieval. We compare the BPNN to conventional deep neural networks (NNs) on several phase retrieval problems, comprising both synthetic and contemporary real-world problems (e.g., metamaterials for which data collection requires substantial expertise and is time consuming). On each phase retrieval problem, we compare against a population of conventional NNs of varying size and hyperparameter settings. Even without any hyper-parameter search, we find that BPNNs consistently outperform the population of optimized NNs in scarce data scenarios, and do so despite being much smaller models. The results can in turn be applied to calculate the refractive index of metamaterials, which is an important problem in emerging areas of material science.
LLOL: Low-Latency Odometry for Spinning Lidars
Oct 04, 2021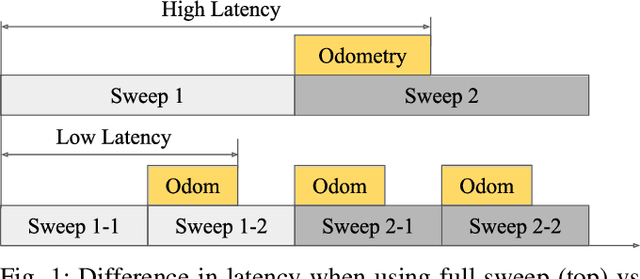
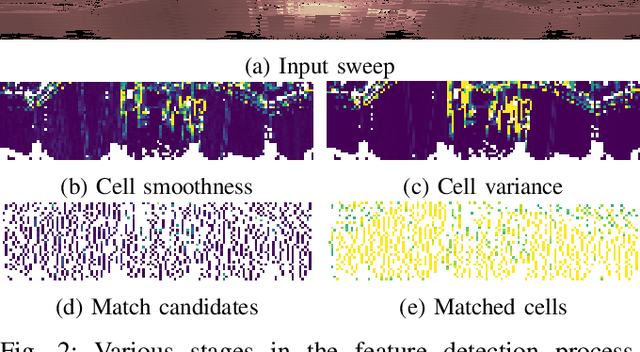
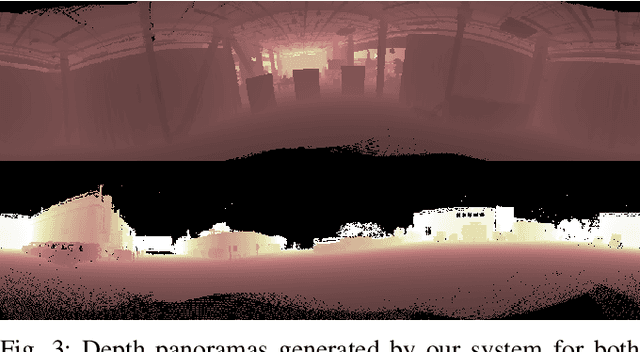
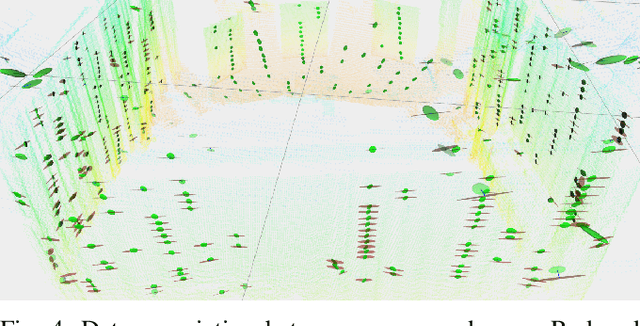
In this paper, we present a low-latency odometry system designed for spinning lidars. Many existing lidar odometry methods wait for an entire sweep from the lidar before processing the data. This introduces a large delay between the first laser firing and its pose estimate. To reduce this latency, we treat the spinning lidar as a streaming sensor and process packets as they arrive. This effectively distributes expensive operations across time, resulting in a very fast and lightweight system with much higher throughput and lower latency. Our open-source implementation is available at \url{https://github.com/versatran01/llol}.
Robustness via Uncertainty-aware Cycle Consistency
Oct 24, 2021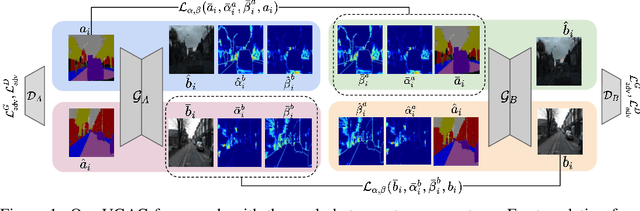
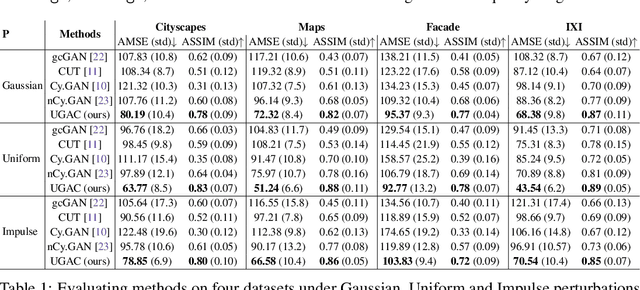
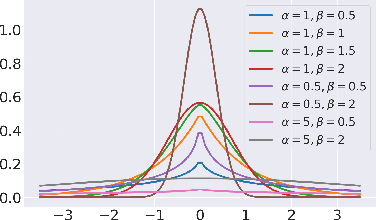
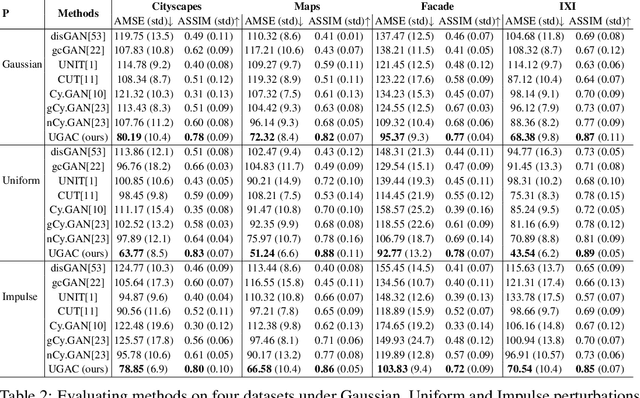
Unpaired image-to-image translation refers to learning inter-image-domain mapping without corresponding image pairs. Existing methods learn deterministic mappings without explicitly modelling the robustness to outliers or predictive uncertainty, leading to performance degradation when encountering unseen perturbations at test time. To address this, we propose a novel probabilistic method based on Uncertainty-aware Generalized Adaptive Cycle Consistency (UGAC), which models the per-pixel residual by generalized Gaussian distribution, capable of modelling heavy-tailed distributions. We compare our model with a wide variety of state-of-the-art methods on various challenging tasks including unpaired image translation of natural images, using standard datasets, spanning autonomous driving, maps, facades, and also in medical imaging domain consisting of MRI. Experimental results demonstrate that our method exhibits stronger robustness towards unseen perturbations in test data. Code is released here: https://github.com/ExplainableML/UncertaintyAwareCycleConsistency.
Characterizing and Taming Resolution in Convolutional Neural Networks
Oct 28, 2021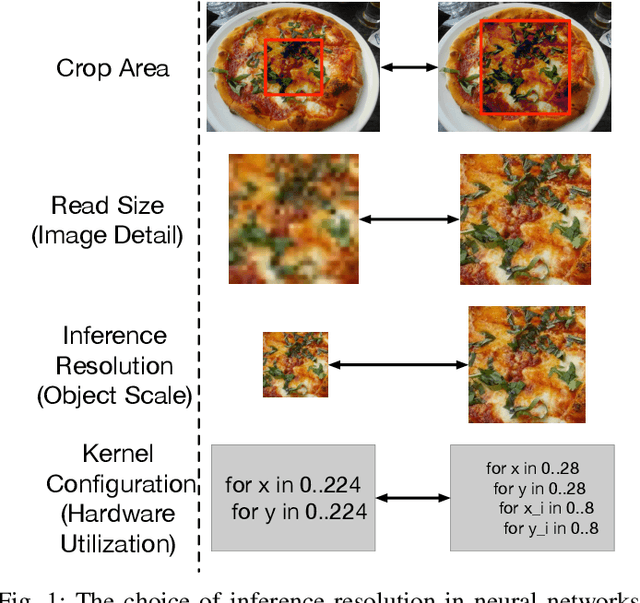
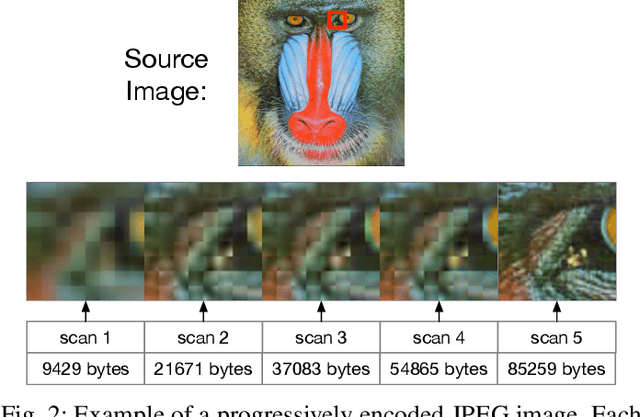
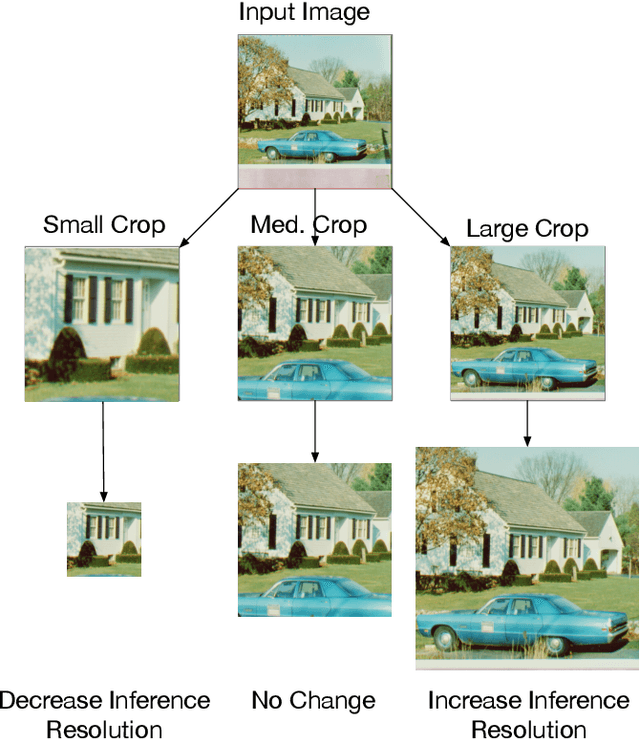
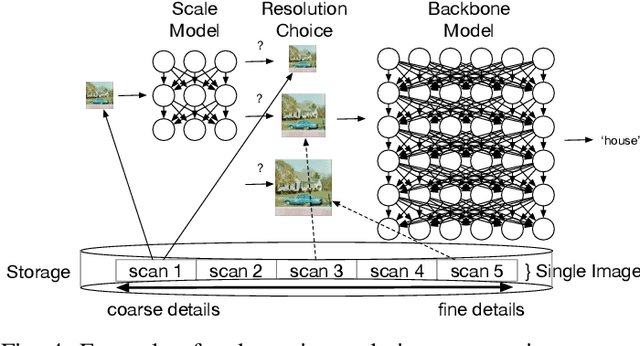
Image resolution has a significant effect on the accuracy and computational, storage, and bandwidth costs of computer vision model inference. These costs are exacerbated when scaling out models to large inference serving systems and make image resolution an attractive target for optimization. However, the choice of resolution inherently introduces additional tightly coupled choices, such as image crop size, image detail, and compute kernel implementation that impact computational, storage, and bandwidth costs. Further complicating this setting, the optimal choices from the perspective of these metrics are highly dependent on the dataset and problem scenario. We characterize this tradeoff space, quantitatively studying the accuracy and efficiency tradeoff via systematic and automated tuning of image resolution, image quality and convolutional neural network operators. With the insights from this study, we propose a dynamic resolution mechanism that removes the need to statically choose a resolution ahead of time.
De Novo Molecular Generation with Stacked Adversarial Model
Oct 24, 2021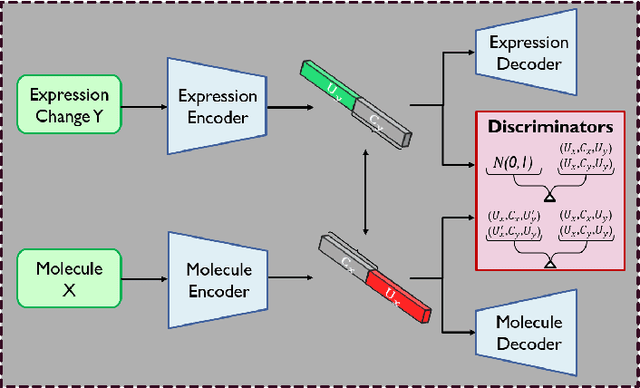
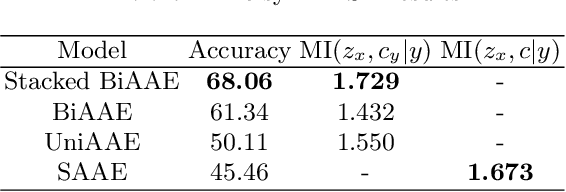
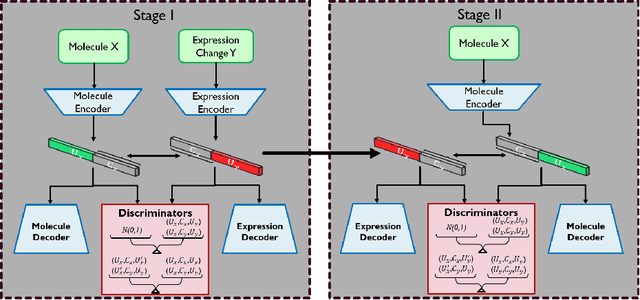

Generating novel drug molecules with desired biological properties is a time consuming and complex task. Conditional generative adversarial models have recently been proposed as promising approaches for de novo drug design. In this paper, we propose a new generative model which extends an existing adversarial autoencoder (AAE) based model by stacking two models together. Our stacked approach generates more valid molecules, as well as molecules that are more similar to known drugs. We break down this challenging task into two sub-problems. A first stage model to learn primitive features from the molecules and gene expression data. A second stage model then takes these features to learn properties of the molecules and refine more valid molecules. Experiments and comparison to baseline methods on the LINCS L1000 dataset demonstrate that our proposed model has promising performance for molecular generation.
A novel data-driven algorithm to predict anomalous prescription based on patient's feature set
Nov 30, 2021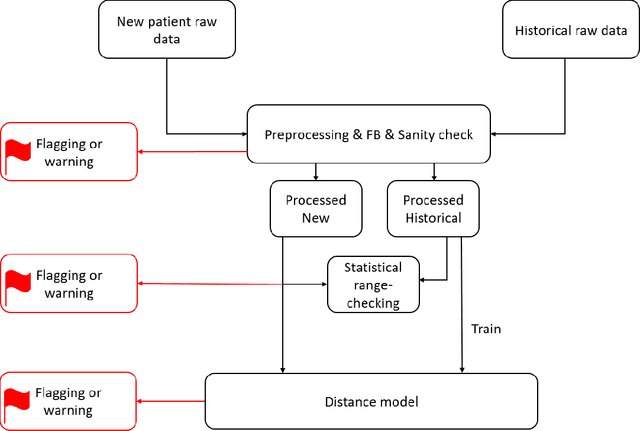
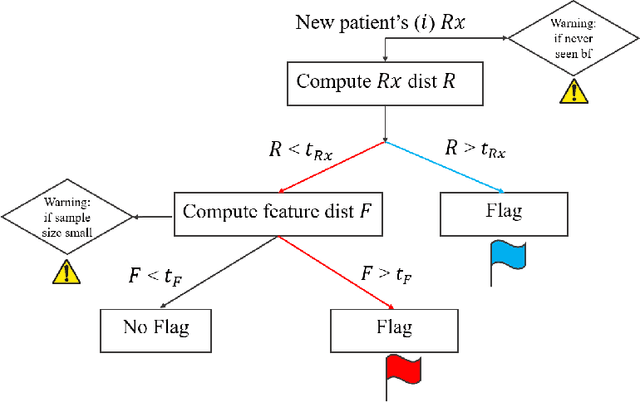
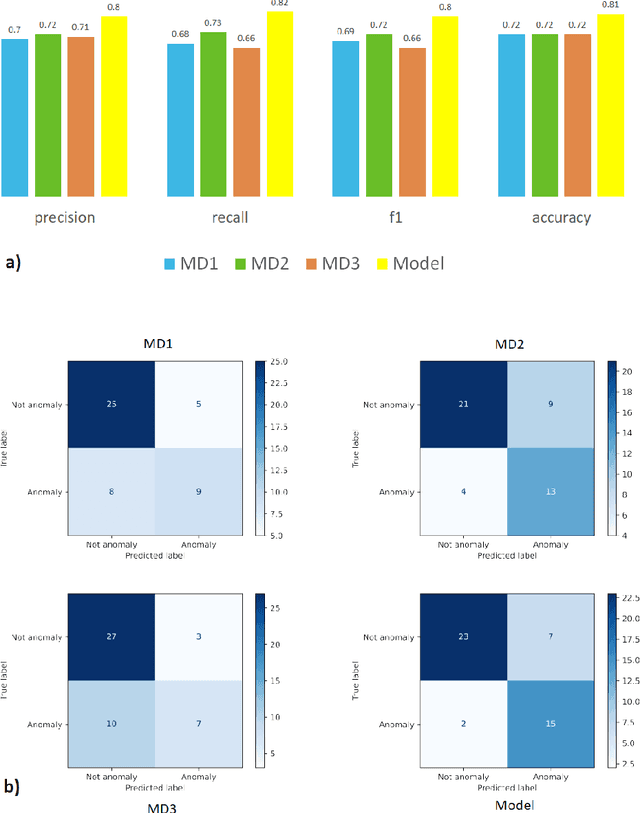
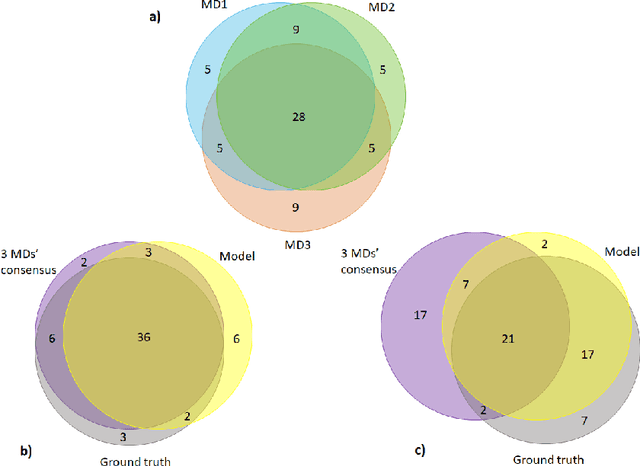
Appropriate dosing of radiation is crucial to patient safety in radiotherapy. Current quality assurance depends heavily on a peer-review process, where the physicians' peer review on each patient's treatment plan, including dose and fractionation. However, such a process is manual and laborious. Physicians may not identify errors due to time constraints and caseload. We designed a novel prescription anomaly detection algorithm that utilizes historical data to predict anomalous cases. Such a tool can serve as an electronic peer who will assist the peer-review process providing extra safety to the patients. In our primary model, we created two dissimilarity metrics, R and F. R defining how far a new patient's prescription is from historical prescriptions. F represents how far away a patient's feature set is from the group with an identical or similar prescription. We flag prescription if either metric is greater than specific optimized cut-off values. We used thoracic cancer patients (n=2356) as an example and extracted seven features. Here, we report our testing f1 score, between 75%-94% for different treatment technique groups. We also independently validate our results by conducting a mock peer review with three thoracic specialists. Our model has a lower type 2 error rate compared to manual peer-review physicians. Our model has many advantages over traditional machine learning algorithms, particularly in that it does not suffer from class imbalance. It can also explain why it flags each case and separate prescription and non-prescription-related features without learning from the data.
Improved Safe Real-time Heuristic Search
May 15, 2019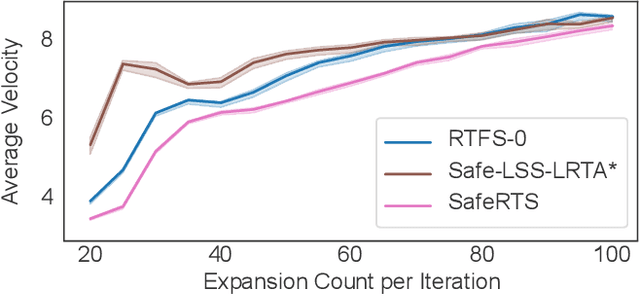
A fundamental concern in real-time planning is the presence of dead-ends in the state space, from which no goal is reachable. Recently, the SafeRTS algorithm was proposed for searching in such spaces. SafeRTS exploits a user-provided predicate to identify safe states, from which a goal is likely reachable, and attempts to maintain a backup plan for reaching a safe state at all times. In this paper, we study the SafeRTS approach, identify certain properties of its behavior, and design an improved framework for safe real-time search. We prove that the new approach performs at least as well as SafeRTS and present experimental results showing that its promise is fulfilled in practice.
Distributed Adaptive Learning Under Communication Constraints
Dec 03, 2021
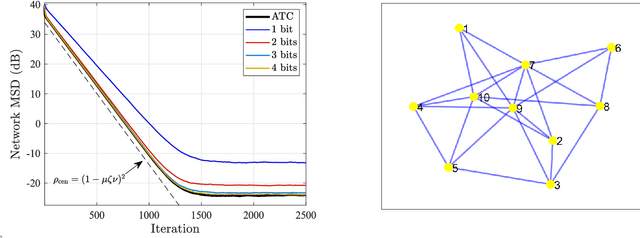
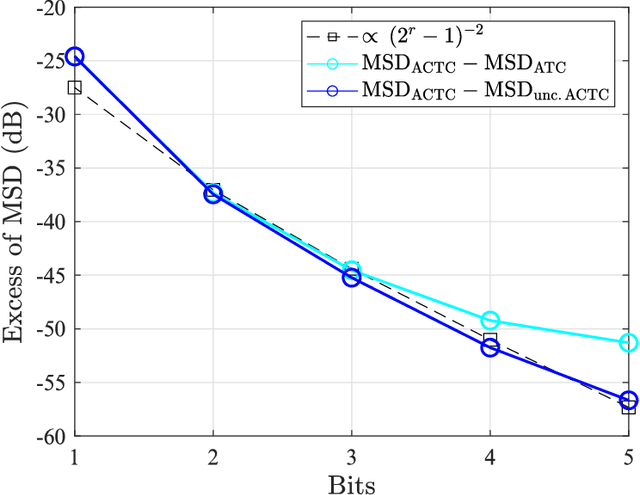
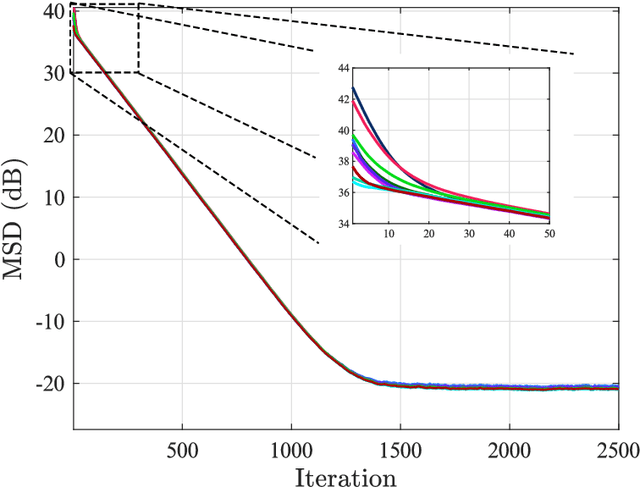
This work examines adaptive distributed learning strategies designed to operate under communication constraints. We consider a network of agents that must solve an online optimization problem from continual observation of streaming data. The agents implement a distributed cooperative strategy where each agent is allowed to perform local exchange of information with its neighbors. In order to cope with communication constraints, the exchanged information must be unavoidably compressed. We propose a diffusion strategy nicknamed as ACTC (Adapt-Compress-Then-Combine), which relies on the following steps: i) an adaptation step where each agent performs an individual stochastic-gradient update with constant step-size; ii) a compression step that leverages a recently introduced class of stochastic compression operators; and iii) a combination step where each agent combines the compressed updates received from its neighbors. The distinguishing elements of this work are as follows. First, we focus on adaptive strategies, where constant (as opposed to diminishing) step-sizes are critical to respond in real time to nonstationary variations. Second, we consider the general class of directed graphs and left-stochastic combination policies, which allow us to enhance the interplay between topology and learning. Third, in contrast with related works that assume strong convexity for all individual agents' cost functions, we require strong convexity only at a network level, a condition satisfied even if a single agent has a strongly-convex cost and the remaining agents have non-convex costs. Fourth, we focus on a diffusion (as opposed to consensus) strategy. Under the demanding setting of compressed information, we establish that the ACTC iterates fluctuate around the desired optimizer, achieving remarkable savings in terms of bits exchanged between neighboring agents.
Synthesis-Guided Feature Learning for Cross-Spectral Periocular Recognition
Nov 16, 2021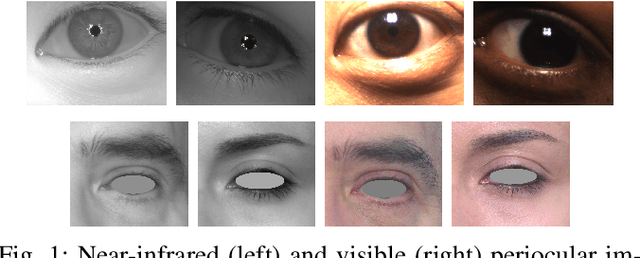
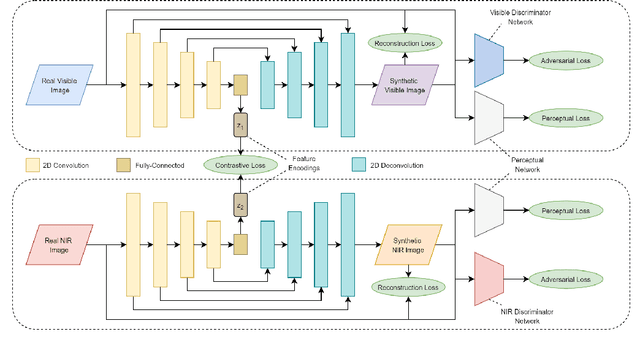

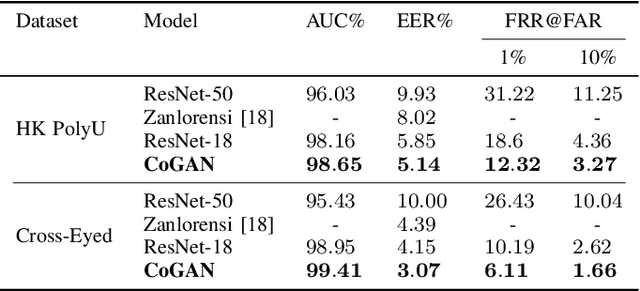
A common yet challenging scenario in periocular biometrics is cross-spectral matching - in particular, the matching of visible wavelength against near-infrared (NIR) periocular images. We propose a novel approach to cross-spectral periocular verification that primarily focuses on learning a mapping from visible and NIR periocular images to a shared latent representational subspace, and supports this effort by simultaneously learning intra-spectral image reconstruction. We show the auxiliary image reconstruction task (and in particular the reconstruction of high-level, semantic features) results in learning a more discriminative, domain-invariant subspace compared to the baseline while incurring no additional computational or memory costs at test-time. The proposed Coupled Conditional Generative Adversarial Network (CoGAN) architecture uses paired generator networks (one operating on visible images and the other on NIR) composed of U-Nets with ResNet-18 encoders trained for feature learning via contrastive loss and for intra-spectral image reconstruction with adversarial, pixel-based, and perceptual reconstruction losses. Moreover, the proposed CoGAN model beats the current state-of-art (SotA) in cross-spectral periocular recognition. On the Hong Kong PolyU benchmark dataset, we achieve 98.65% AUC and 5.14% EER compared to the SotA EER of 8.02%. On the Cross-Eyed dataset, we achieve 99.31% AUC and 3.99% EER versus SotA EER of 4.39%.
Productive Multitasking for Industrial Robots
Aug 25, 2021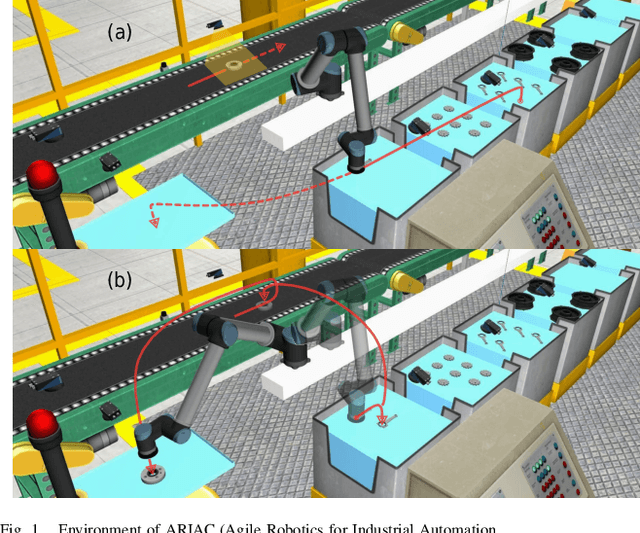
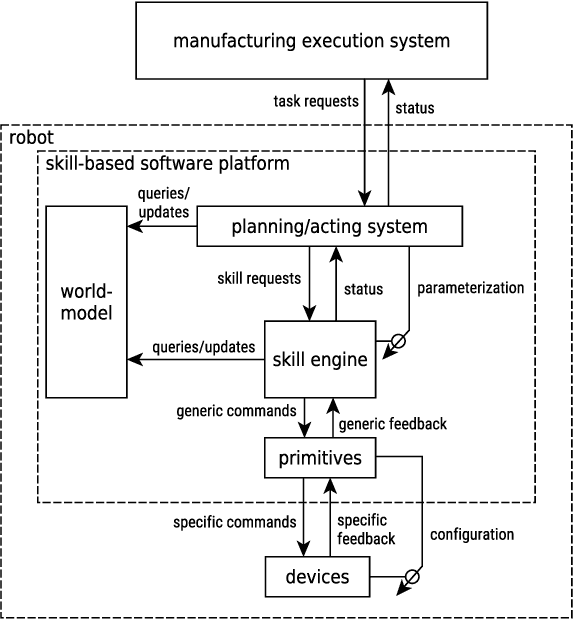

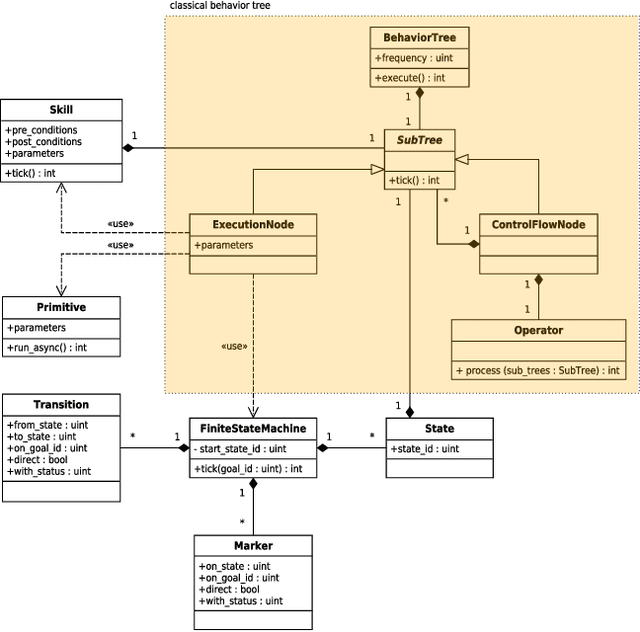
The application of robotic solutions to small-batch production is challenging: economical constraints tend to dramatically limit the time for setting up new batches. Organizing robot tasks into modular software components, called skills, and allowing the assignment of multiple concurrent tasks to a single robot is potentially game-changing. However, due to cycle time constraints, it may be necessary for a skill to take over without waiting on another to terminate, and the available literature lacks a systematic approach in this case. In the present article, we fill the gap by (a) establishing the specifications of skills that can be sequenced with partial executions, (b) proposing an implementation based on the combination of finite-state machines and behavior trees, and (c) demonstrating the benefits of such skills through extensive trials in the environment of ARIAC (Agile Robotics for Industrial Automation Competition).