 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
T$^{\star}$-Lite: A Fast Time-Risk Optimal Motion Planning Algorithm for Multi-Speed Autonomous Vehicles
Aug 29, 2020
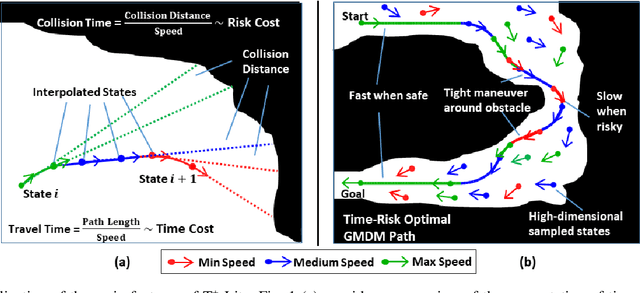
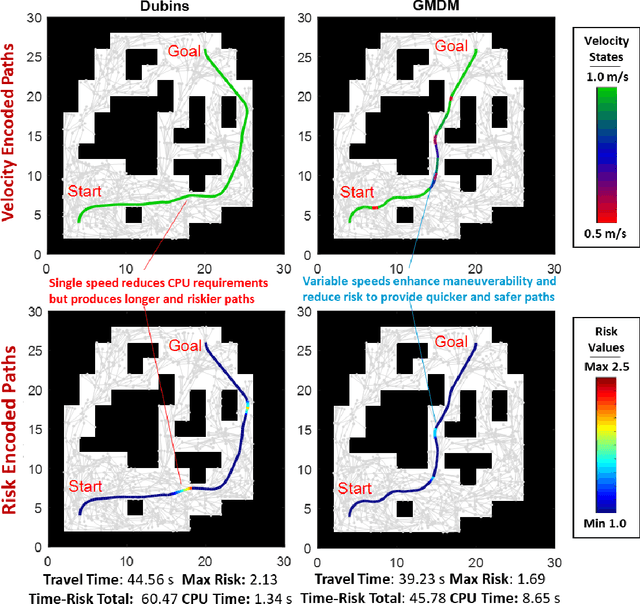
In this paper, we develop a new algorithm, called T$^{\star}$-Lite, that enables fast time-risk optimal motion planning for variable-speed autonomous vehicles. The T$^{\star}$-Lite algorithm is a significantly faster version of the previously developed T$^{\star}$ algorithm. T$^{\star}$-Lite uses the novel time-risk cost function of T$^{\star}$; however, instead of a grid-based approach, it uses an asymptotically optimal sampling-based motion planner. Furthermore, it utilizes the recently developed Generalized Multi-speed Dubins Motion-model (GMDM) for sample-to-sample kinodynamic motion planning. The sample-based approach and GMDM significantly reduce the computational burden of T$^{\star}$ while providing reasonable solution quality. The sample points are drawn from a four-dimensional configuration space consisting of two position coordinates plus vehicle heading and speed. Specifically, T$^{\star}$-Lite enables the motion planner to select the vehicle speed and direction based on its proximity to the obstacle to generate faster and safer paths. In this paper, T$^{\star}$-Lite is developed using the RRT$^{\star}$ motion planner, but adaptation to other motion planners is straightforward and depends on the needs of the planner
A minimalistic stochastic dynamics model of cluttered obstacle traversal
Dec 15, 2021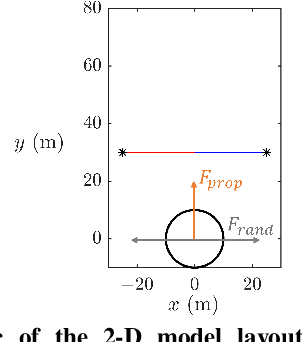
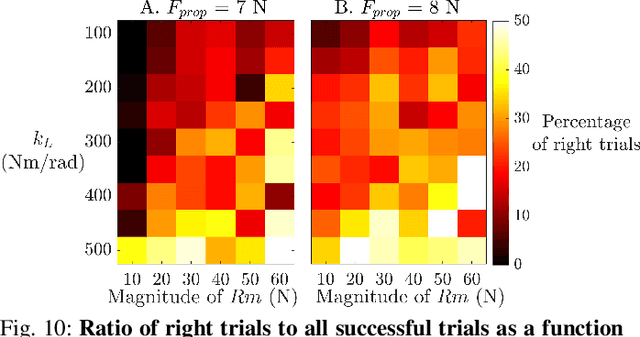
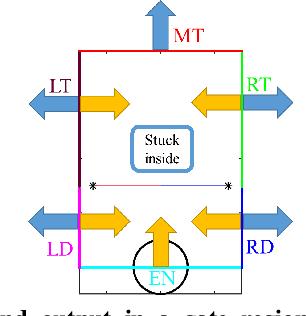
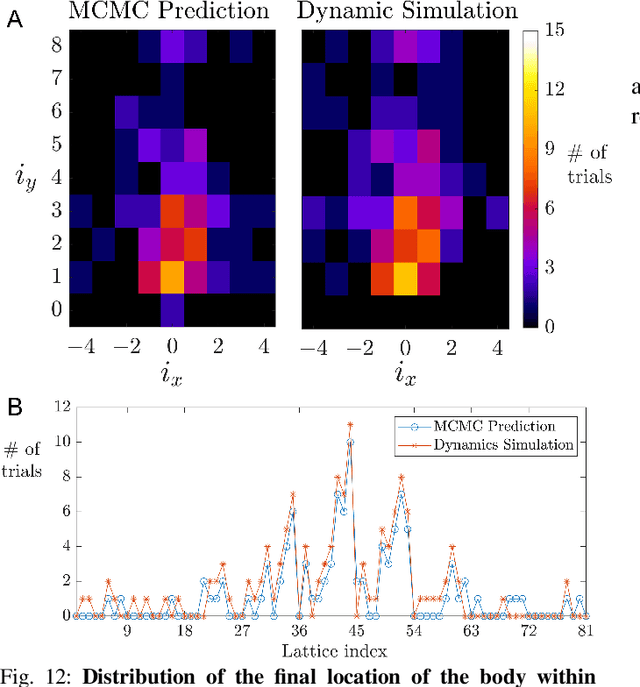
Robots are still poor at traversing cluttered large obstacles required for important applications like search and rescue. By contrast, animals are excellent at doing so, often using direct physical interaction with obstacles rather than avoiding them. Here, towards understanding the dynamics of cluttered obstacle traversal, we developed a minimalistic stochastic dynamics simulation inspired by our recent study of insects traversing grass-like beams. The 2-D model system consists of a forward self-propelled circular locomotor translating on a frictionless level plane with a lateral random force and interacting with two adjacent horizontal beams that form a gate. We found that traversal probability increases monotonically with propulsive force, but first increases then decreases with random force magnitude. For asymmetric beams with different stiffness, traversal is more likely towards the side of the less stiff beam. These observations are in accord with those expected from a potential energy landscape approach. Furthermore, we extended the single gate in a lattice configuration to form a large cluttered obstacle field. A Markov chain Monte Carlo method was applied to predict traversal in the large field, using the input-output probability map obtained from single gate simulations. This method achieved high accuracy in predicting the statistical distribution of the final location of the body within the obstacle field, while saving computation time by a factor of 10^5.
LatentHuman: Shape-and-Pose Disentangled Latent Representation for Human Bodies
Nov 30, 2021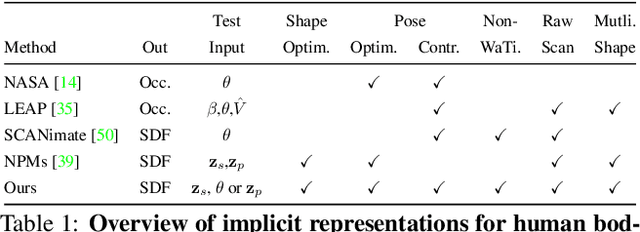
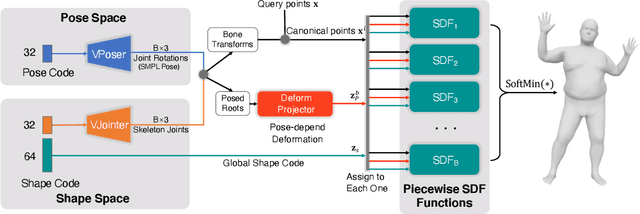
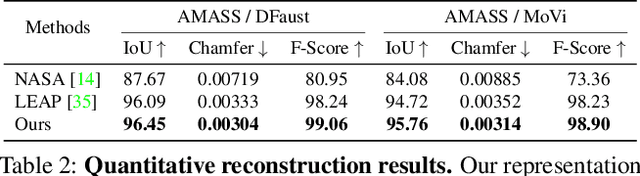
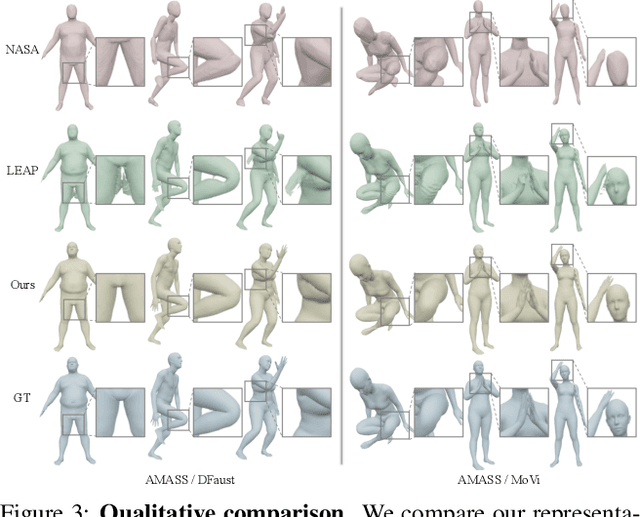
3D representation and reconstruction of human bodies have been studied for a long time in computer vision. Traditional methods rely mostly on parametric statistical linear models, limiting the space of possible bodies to linear combinations. It is only recently that some approaches try to leverage neural implicit representations for human body modeling, and while demonstrating impressive results, they are either limited by representation capability or not physically meaningful and controllable. In this work, we propose a novel neural implicit representation for the human body, which is fully differentiable and optimizable with disentangled shape and pose latent spaces. Contrary to prior work, our representation is designed based on the kinematic model, which makes the representation controllable for tasks like pose animation, while simultaneously allowing the optimization of shape and pose for tasks like 3D fitting and pose tracking. Our model can be trained and fine-tuned directly on non-watertight raw data with well-designed losses. Experiments demonstrate the improved 3D reconstruction performance over SoTA approaches and show the applicability of our method to shape interpolation, model fitting, pose tracking, and motion retargeting.
AI-Based Radio Resource Management and Trajectory Design in CoMP UAV VLC Networks: Constant Velocity Vs. Constant Acceleration
Nov 06, 2021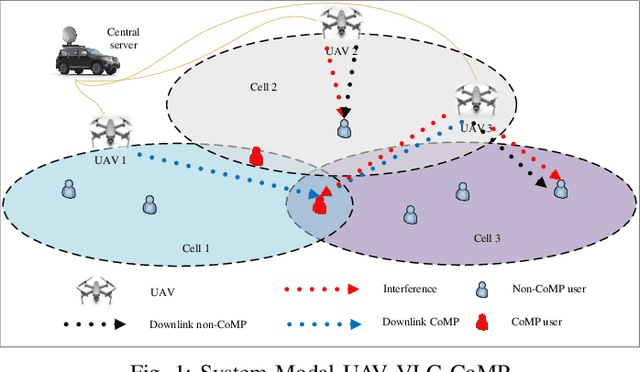
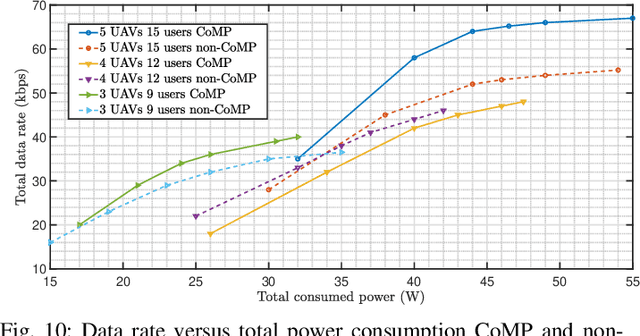
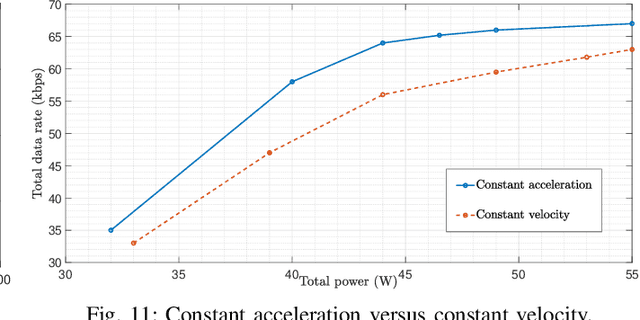
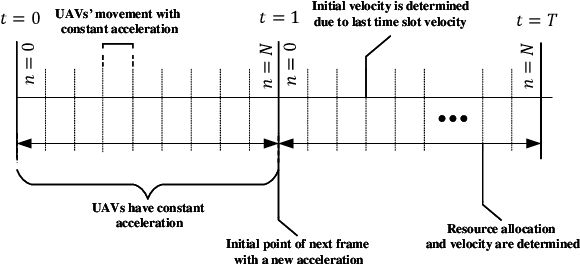
In this paper, we consider UAVs equipped with a VLC access point and coordinated multipoint (CoMP) capability that allows users to connect to more than one UAV. UAVs can move in 3-dimensional (3D) at a constant acceleration in each master timescale, where a central server is responsible for synchronization and cooperation among UAVs. We define the data rate for each user type, CoMP and non-CoMP. The constant speed in UAVs' motion is not practical, and the effect of acceleration on the movement of UAVs is necessary to be considered. Unlike most existing works, we see the effect of variable speed on kinetic and allocation formulas. For the proposed system model, we define timescales for two different slots in which resources are allocated. In the master timescale, the acceleration of each UAV is specified, and in each short timescale, radio resources are allocated. The initial velocity in each small time slot is obtained from the previous time slot's velocity. Our goal is to formulate a multiobjective optimization problem where the total data rate is maximized and the total communication power consumption is minimized simultaneously. To deal this multiobjective optimization, we first apply the weighted method and then apply multi-agent deep deterministic policy gradient (MADDPG) which is a multi-agent method based on deep deterministic policy gradient (DDPG) that ensures more stable and faster convergence. We improve this solution method by adding two critic networks as well as allocating the two step acceleration. Simulation results indicate that the constant acceleration motion of UAVs gives about 8\% better results than conventional motion systems in terms of performance. Furthermore, CoMP supports the system to achieve an average of about 12\% higher rates comparing with non-CoMP system.
Alzheimers Dementia Detection using Acoustic & Linguistic features and Pre-Trained BERT
Sep 24, 2021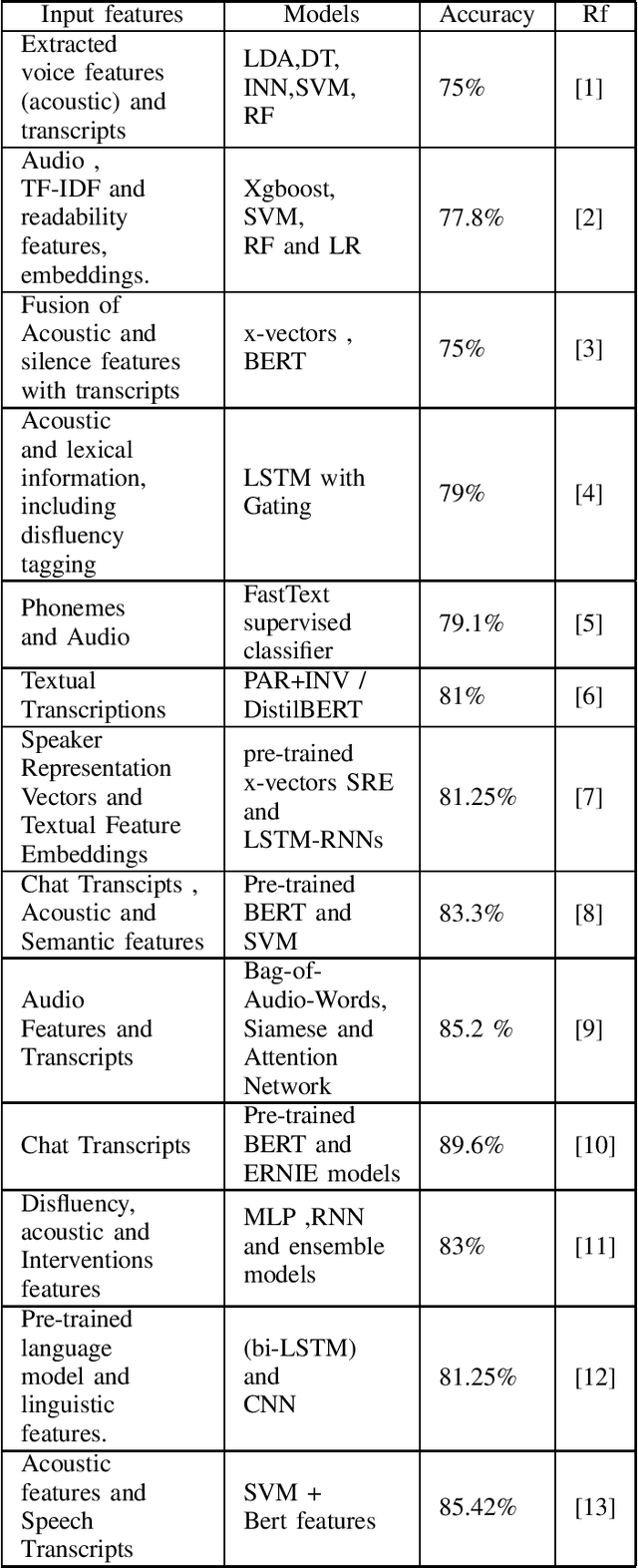
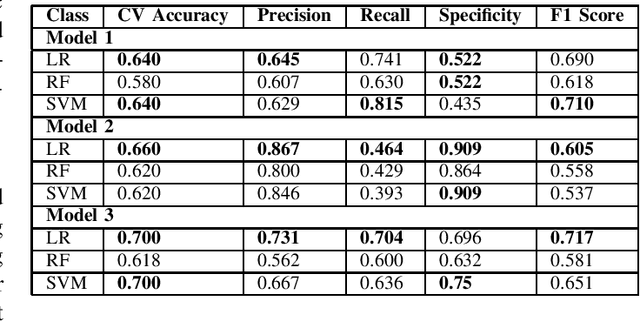
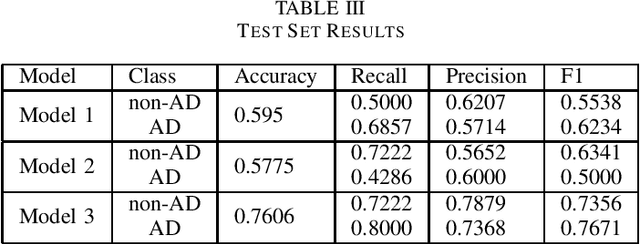
Alzheimers disease is a fatal progressive brain disorder that worsens with time. It is high time we have inexpensive and quick clinical diagnostic techniques for early detection and care. In previous studies, various Machine Learning techniques and Pre-trained Deep Learning models have been used in conjunction with the extraction of various acoustic and linguistic features. Our study focuses on three models for the classification task in the ADReSS (The Alzheimers Dementia Recognition through Spontaneous Speech) 2021 Challenge. We use the well-balanced dataset provided by the ADReSS Challenge for training and validating our models. Model 1 uses various acoustic features from the eGeMAPs feature-set, Model 2 uses various linguistic features that we generated from auto-generated transcripts and Model 3 uses the auto-generated transcripts directly to extract features using a Pre-trained BERT and TF-IDF. These models are described in detail in the models section.
SFFDD: Deep Neural Network with Enriched Features for Failure Prediction with Its Application to Computer Disk Driver
Sep 20, 2021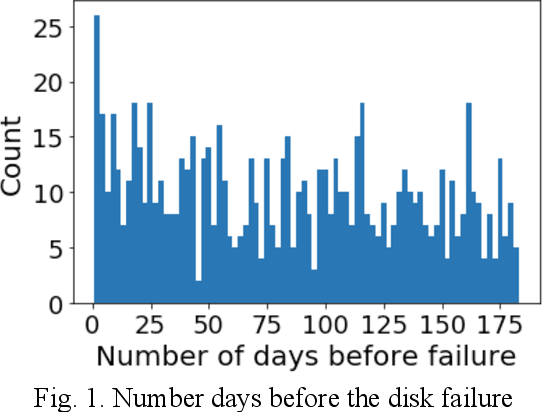
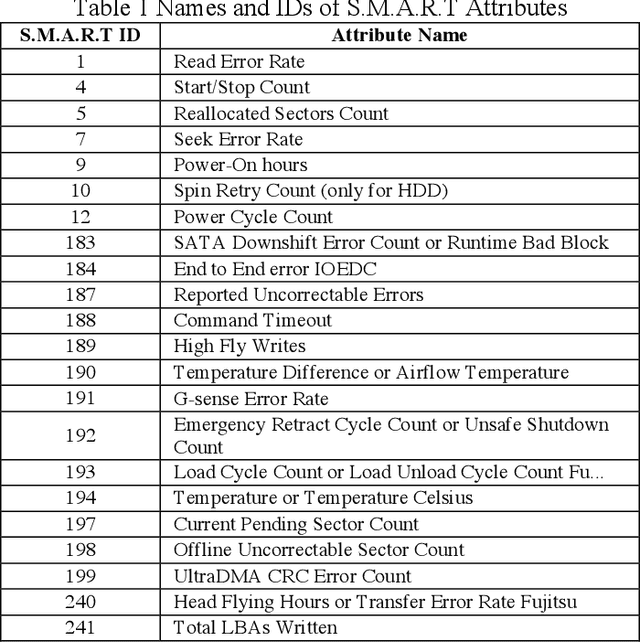
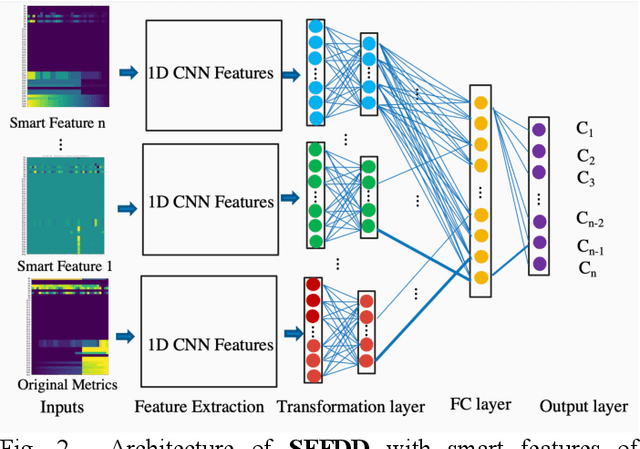
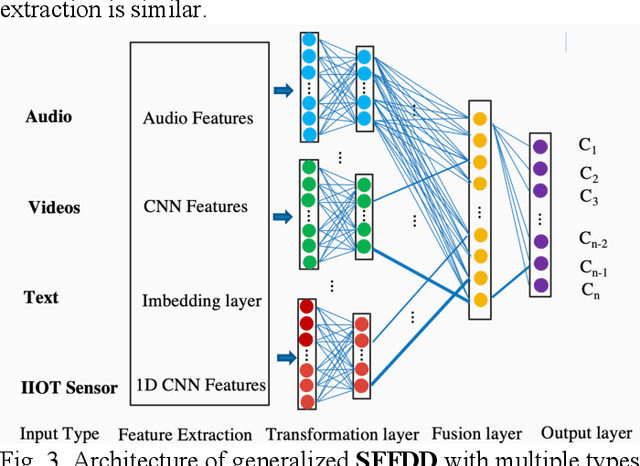
A classification technique incorporating a novel feature derivation method is proposed for predicting failure of a system or device with multivariate time series sensor data. We treat the multivariate time series sensor data as images for both visualization and computation. Failure follows various patterns which are closely related to the root causes. Different predefined transformations are applied on the original sensors data to better characterize the failure patterns. In addition to feature derivation, ensemble method is used to further improve the performance. In addition, a general algorithm architecture of deep neural network is proposed to handle multiple types of data with less manual feature engineering. We apply the proposed method on the early predict failure of computer disk drive in order to improve storage systems availability and avoid data loss. The classification accuracy is largely improved with the enriched features, named smart features.
Distributed Optimization using Heterogeneous Compute Systems
Oct 03, 2021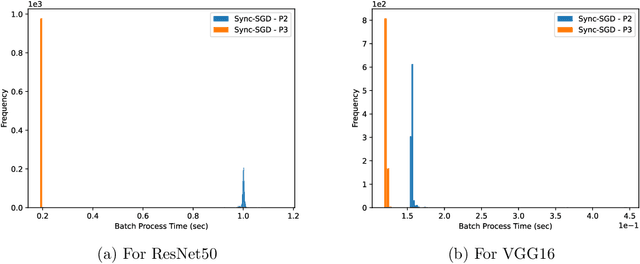
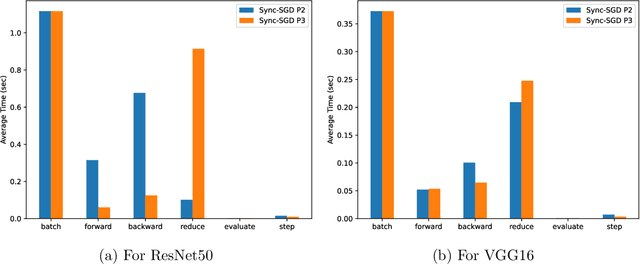
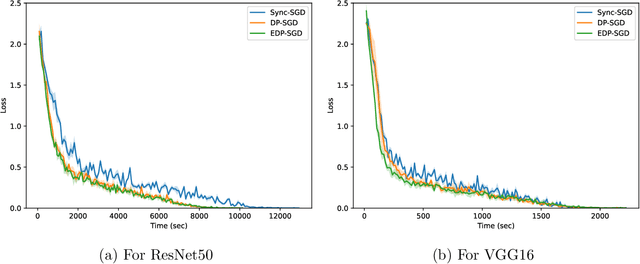
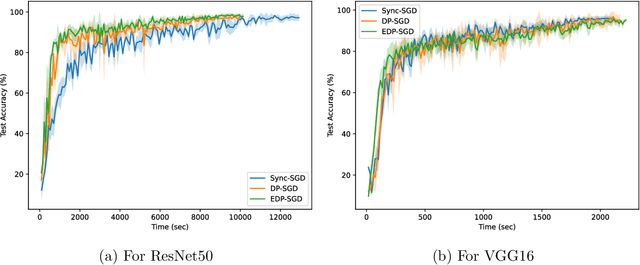
Hardware compute power has been growing at an unprecedented rate in recent years. The utilization of such advancements plays a key role in producing better results in less time -- both in academia and industry. However, merging the existing hardware with the latest hardware within the same ecosystem poses a challenging task. One of the key challenges, in this case, is varying compute power. In this paper, we consider the training of deep neural networks on a distributed system of workers with varying compute power. A naive implementation of synchronous distributed training will result in the faster workers waiting for the slowest worker to complete processing. To mitigate this issue, we propose to dynamically adjust the data assigned for each worker during the training. We assign each worker a partition of total data proportional to its computing power. Our experiments show that dynamically adjusting the data partition helps to improve the utilization of the system and significantly reduces the time taken for training. Code is available at the repository: \url{https://github.com/vineeths96/Heterogeneous-Systems}.
Predicting Treatment Initiation from Clinical Time Series Data via Graph-Augmented Time-Sensitive Model
Jul 01, 2019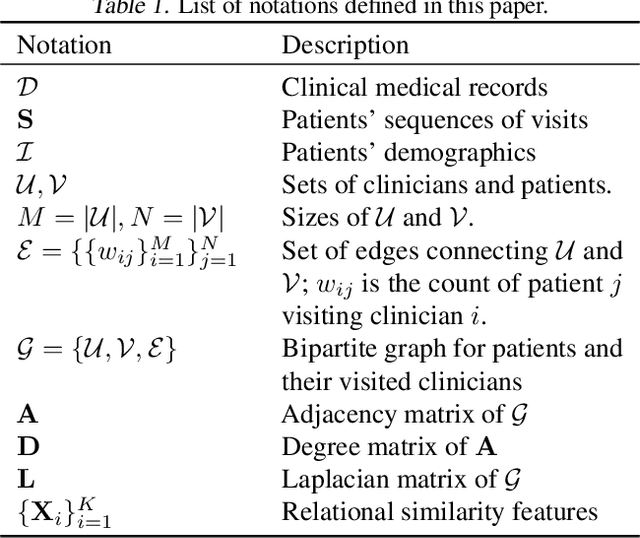
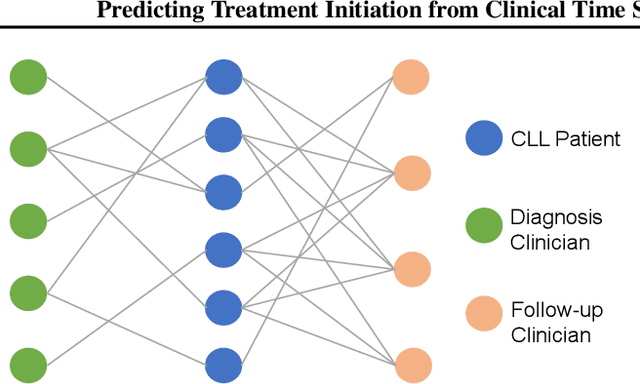
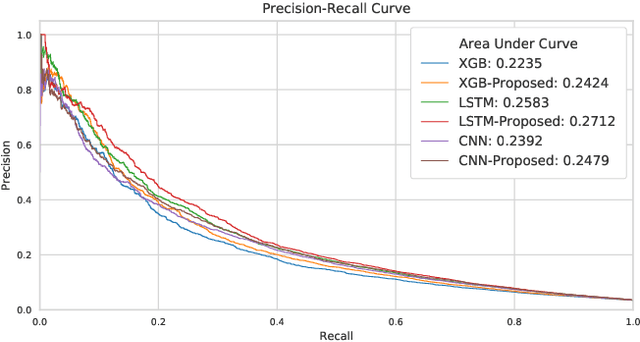
Many computational models were proposed to extract temporal patterns from clinical time series for each patient and among patient group for predictive healthcare. However, the common relations among patients (e.g., share the same doctor) were rarely considered. In this paper, we represent patients and clinicians relations by bipartite graphs addressing for example from whom a patient get a diagnosis. We then solve for the top eigenvectors of the graph Laplacian, and include the eigenvectors as latent representations of the similarity between patient-clinician pairs into a time-sensitive prediction model. We conducted experiments using real-world data to predict the initiation of first-line treatment for Chronic Lymphocytic Leukemia (CLL) patients. Results show that relational similarity can improve prediction over multiple baselines, for example a 5% incremental over long-short term memory baseline in terms of area under precision-recall curve.
A Reinforcement Learning-based Adaptive Control Model for Future Street Planning, An Algorithm and A Case Study
Dec 10, 2021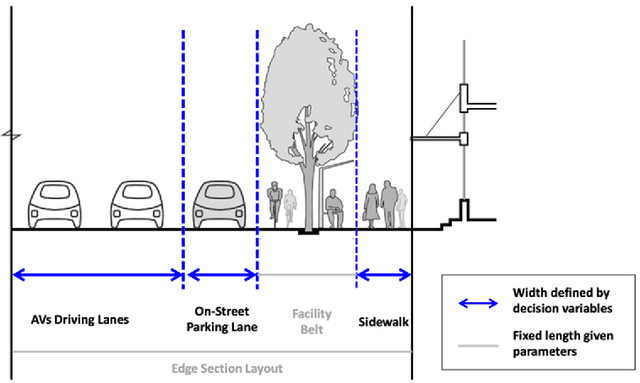
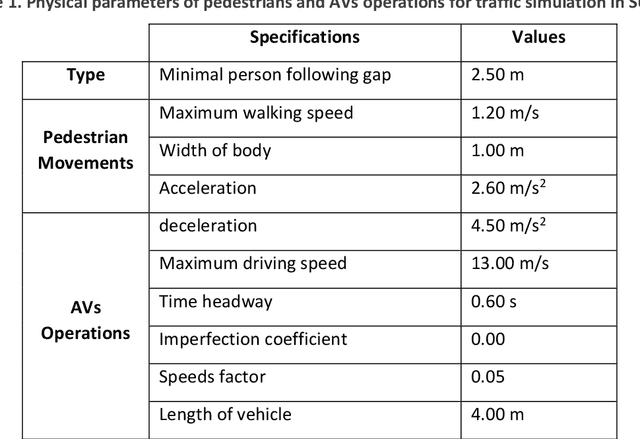
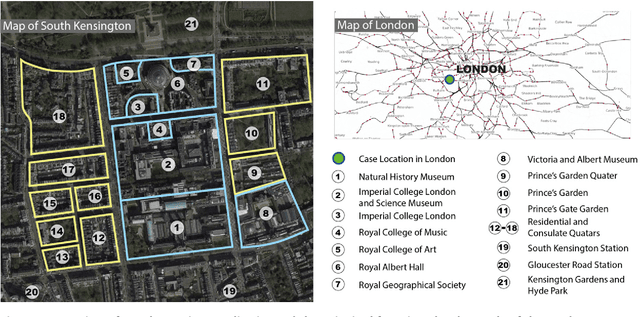
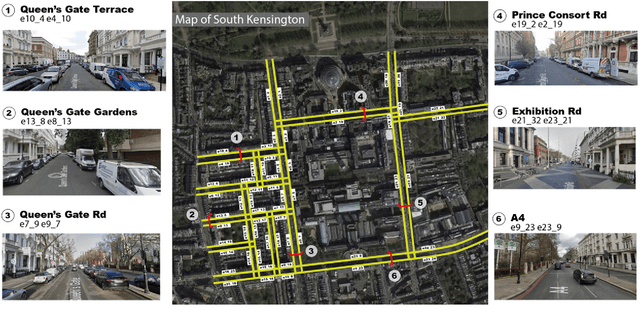
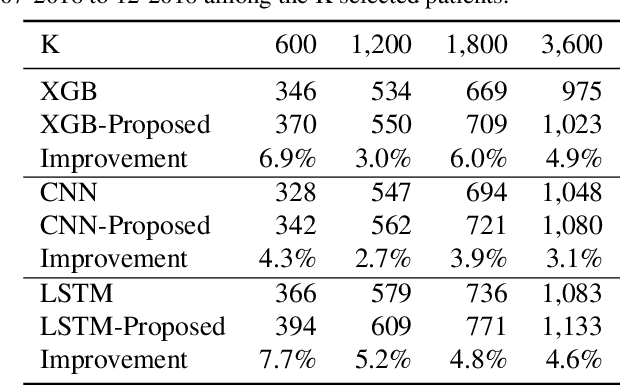
With the emerging technologies in Intelligent Transportation System (ITS), the adaptive operation of road space is likely to be realised within decades. An intelligent street can learn and improve its decision-making on the right-of-way (ROW) for road users, liberating more active pedestrian space while maintaining traffic safety and efficiency. However, there is a lack of effective controlling techniques for these adaptive street infrastructures. To fill this gap in existing studies, we formulate this control problem as a Markov Game and develop a solution based on the multi-agent Deep Deterministic Policy Gradient (MADDPG) algorithm. The proposed model can dynamically assign ROW for sidewalks, autonomous vehicles (AVs) driving lanes and on-street parking areas in real-time. Integrated with the SUMO traffic simulator, this model was evaluated using the road network of the South Kensington District against three cases of divergent traffic conditions: pedestrian flow rates, AVs traffic flow rates and parking demands. Results reveal that our model can achieve an average reduction of 3.87% and 6.26% in street space assigned for on-street parking and vehicular operations. Combined with space gained by limiting the number of driving lanes, the average proportion of sidewalks to total widths of streets can significantly increase by 10.13%.
A Robust Real-Time Computing-based Environment Sensing System for Intelligent Vehicle
Jan 27, 2020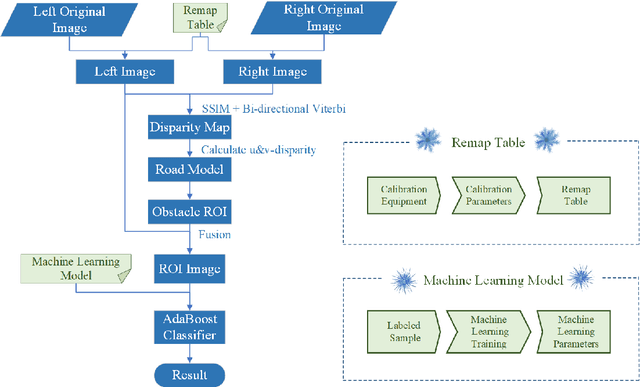
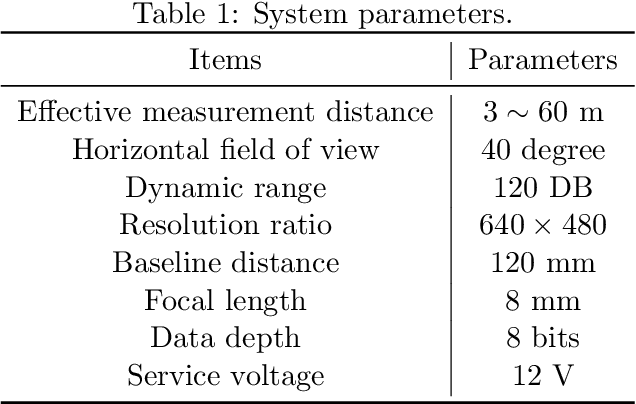
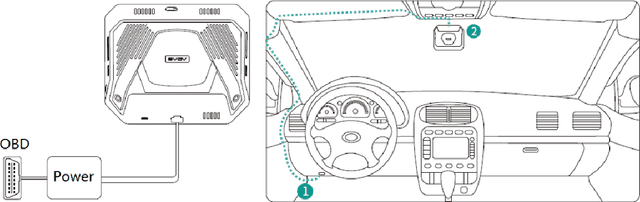
For intelligent vehicles, sensing the 3D environment is the first but crucial step. In this paper, we build a real-time advanced driver assistance system based on a low-power mobile platform. The system is a real-time multi-scheme integrated innovation system, which combines stereo matching algorithm with machine learning based obstacle detection approach and takes advantage of the distributed computing technology of a mobile platform with GPU and CPUs. First of all, a multi-scale fast MPV (Multi-Path-Viterbi) stereo matching algorithm is proposed, which can generate robust and accurate disparity map. Then a machine learning, which is based on fusion technology of monocular and binocular, is applied to detect the obstacles. We also advance an automatic fast calibration mechanism based on Zhang's calibration method. Finally, the distributed computing and reasonable data flow programming are applied to ensure the operational efficiency of the system. The experimental results show that the system can achieve robust and accurate real-time environment perception for intelligent vehicles, which can be directly used in the commercial real-time intelligent driving applications.