 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Is the use of Deep Learning and Artificial Intelligence an appropriate means to locate debris in the ocean without harming aquatic wildlife?
Dec 01, 2021
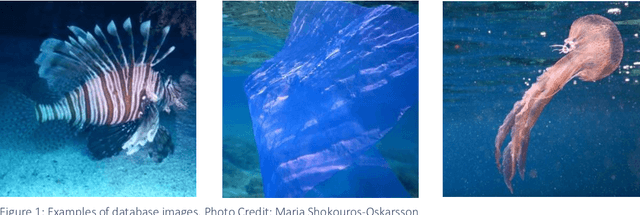
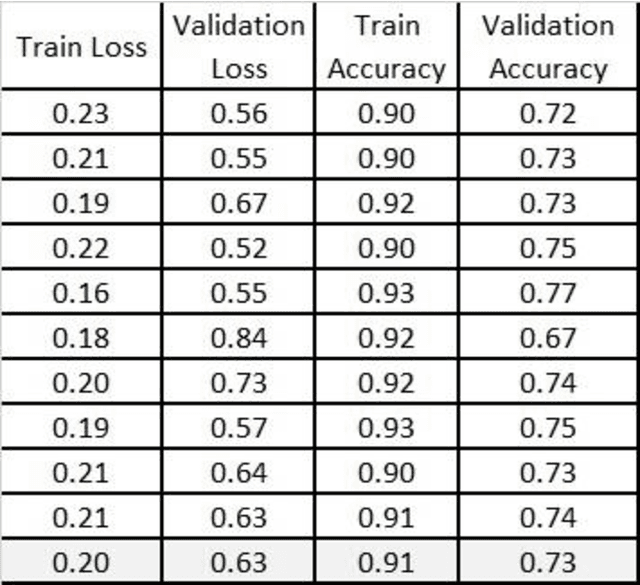

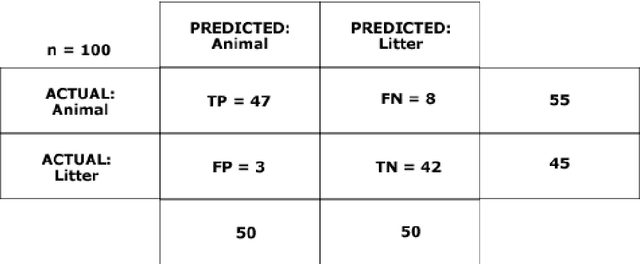
With the global issue of plastic debris ever expanding, it is about time that the technology industry stepped in. This study aims to assess whether deep learning can successfully distinguish between marine life and man-made debris underwater. The aim is to find if we are safely able to clean up our oceans with Artificial Intelligence without disrupting the delicate balance of the aquatic ecosystems. The research explores the use of Convolutional Neural Networks from the perspective of protecting the ecosystem, rather than primarily collecting rubbish. We did this by building a custom-built, deep learning model, with an original database including 1,644 underwater images and used a binary classification to sort synthesised material from aquatic life. We concluded that although it is possible to safely distinguish between debris and life, further exploration with a larger database and stronger CNN structure has the potential for much more promising results.
A comment on stabilizing reinforcement learning
Nov 24, 2021This is a short comment on the paper "Asymptotically Stable Adaptive-Optimal Control Algorithm With Saturating Actuators and Relaxed Persistence of Excitation" by Vamvoudakis et al. The question of stability of reinforcement learning (RL) agents remains hard and the said work suggested an on-policy approach with a suitable stability property using a technique from adaptive control - a robustifying term to be added to the action. However, there is an issue with this approach to stabilizing RL, which we will explain in this note. Furthermore, Vamvoudakis et al. seems to have made a fallacious assumption on the Hamiltonian under a generic policy. To provide a positive result, we will not only indicate this mistake, but show critic neural network weight convergence under a stochastic, continuous-time environment, provided certain conditions on the behavior policy hold.
Towards Computational Awareness in Autonomous Robots: An Empirical Study of Computational Kernels
Dec 20, 2021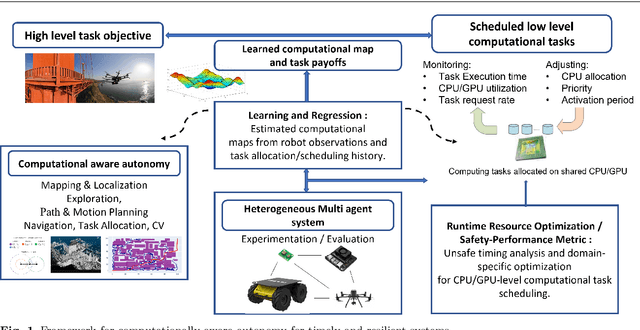

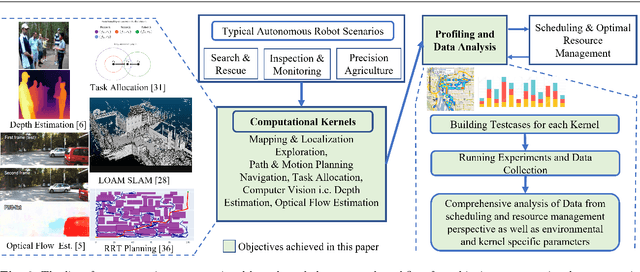
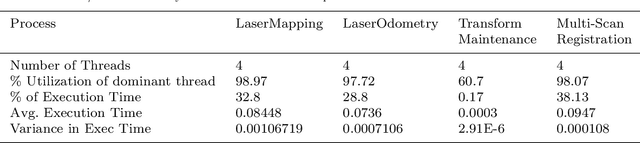
The potential impact of autonomous robots on everyday life is evident in emerging applications such as precision agriculture, search and rescue, and infrastructure inspection. However, such applications necessitate operation in unknown and unstructured environments with a broad and sophisticated set of objectives, all under strict computation and power limitations. We therefore argue that the computational kernels enabling robotic autonomy must be scheduled and optimized to guarantee timely and correct behavior, while allowing for reconfiguration of scheduling parameters at run time. In this paper, we consider a necessary first step towards this goal of computational awareness in autonomous robots: an empirical study of a base set of computational kernels from the resource management perspective. Specifically, we conduct a data-driven study of the timing, power, and memory performance of kernels for localization and mapping, path planning, task allocation, depth estimation, and optical flow, across three embedded computing platforms. We profile and analyze these kernels to provide insight into scheduling and dynamic resource management for computation-aware autonomous robots. Notably, our results show that there is a correlation of kernel performance with a robot's operational environment, justifying the notion of computation-aware robots and why our work is a crucial step towards this goal.
A TCN-based Spatial-Temporal PV Forecasting Framework with Automated Detector Network Selection
Nov 16, 2021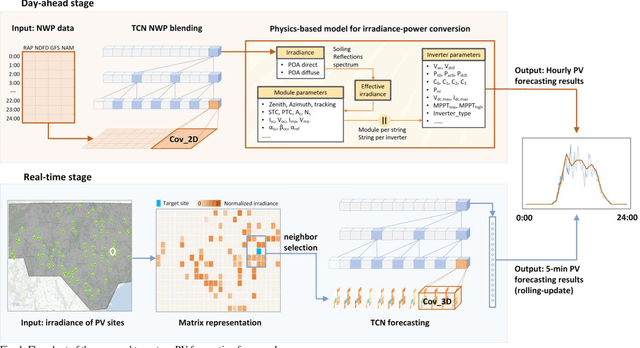
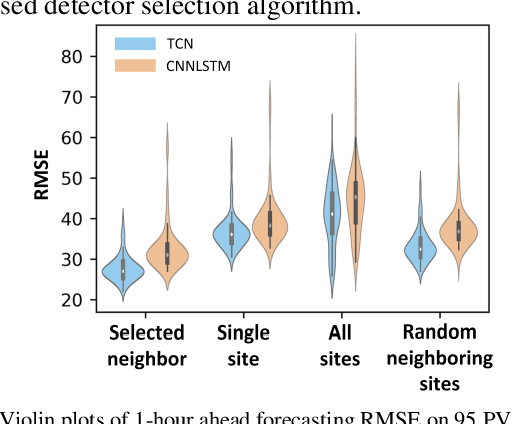
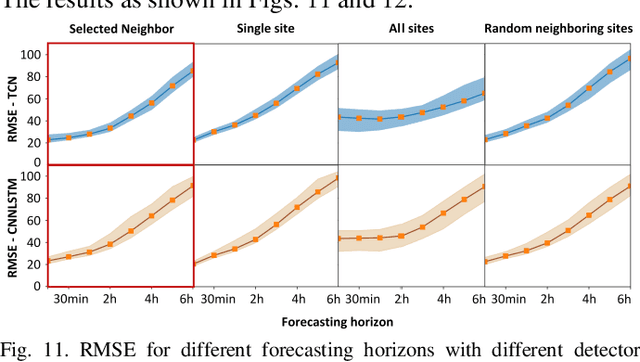
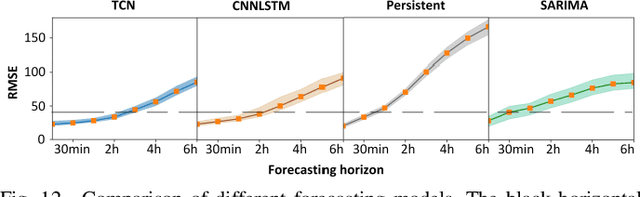
This paper proposes a two-stage PV forecasting framework for MW-level PV farms based on Temporal Convolutional Network (TCN). In the day-ahead stage, inverter-level physics-based model is built to convert Numerical Weather Prediction (NWP) to hourly power forecasts. TCN works as the NWP blender to merge different NWP sources to improve the forecasting accuracy. In the real-time stage, TCN can leverage the spatial-temporal correlations between the target site and its neighbors to achieve intra-hour power forecasts. A scenario-based correlation analysis method is proposed to automatically identify the most contributive neighbors. Simulation results based on 95 PV farms in North Carolina demonstrate the accuracy and efficiency of the proposed method.
Online Estimation and Optimization of Utility-Based Shortfall Risk
Nov 16, 2021Utility-Based Shortfall Risk (UBSR) is a risk metric that is increasingly popular in financial applications, owing to certain desirable properties that it enjoys. We consider the problem of estimating UBSR in a recursive setting, where samples from the underlying loss distribution are available one-at-a-time. We cast the UBSR estimation problem as a root finding problem, and propose stochastic approximation-based estimations schemes. We derive non-asymptotic bounds on the estimation error in the number of samples. We also consider the problem of UBSR optimization within a parameterized class of random variables. We propose a stochastic gradient descent based algorithm for UBSR optimization, and derive non-asymptotic bounds on its convergence.
What went wrong and when? Instance-wise Feature Importance for Time-series Models
Mar 05, 2020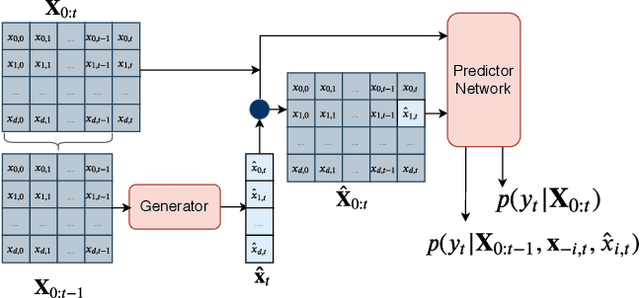
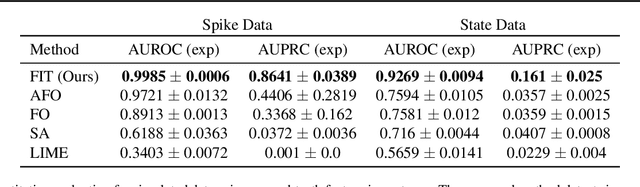
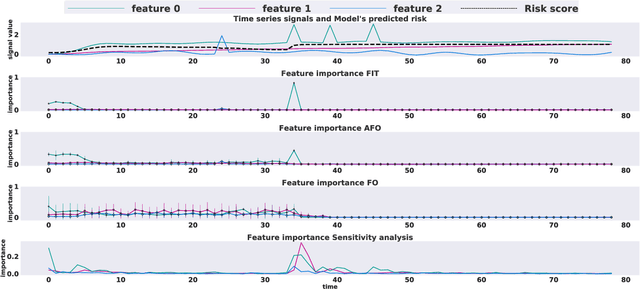
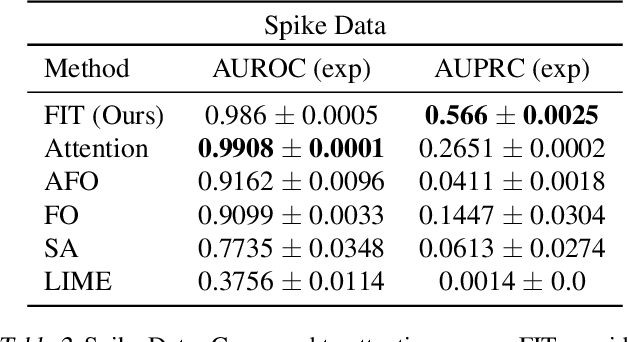
Multivariate time series models are poised to be used for decision support in high-stakes applications, such as healthcare. In these contexts, it is important to know which features at which times most influenced a prediction. We demonstrate a general approach for assigning importance to observations in multivariate time series, based on their counterfactual influence on future predictions. Specifically, we define the importance of an observation as the change in the predictive distribution, had the observation not been seen. We integrate over plausible counterfactuals by sampling from the corresponding conditional distributions of generative time series models. We compare our importance metric to gradient-based explanations, attention mechanisms, and other baselines in simulated and clinical ICU data, and show that our approach generates the most precise explanations. Our method is inexpensive, model agnostic, and can be used with arbitrarily complex time series models and predictors.
Predicting COVID-19 cases using Bidirectional LSTM on multivariate time series
Sep 10, 2020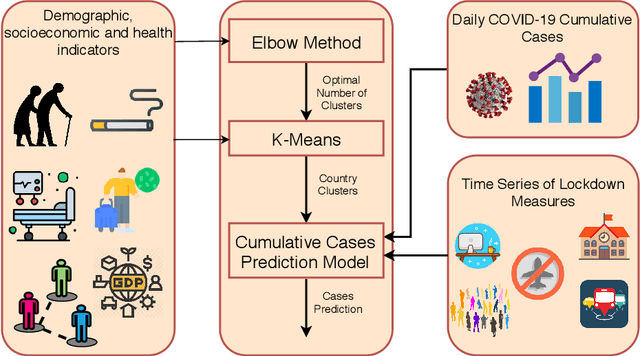
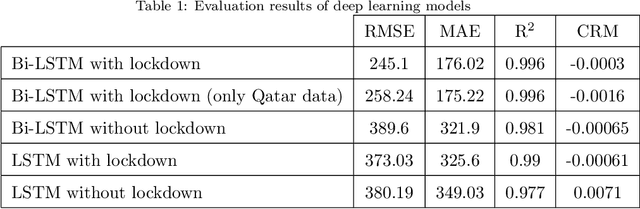
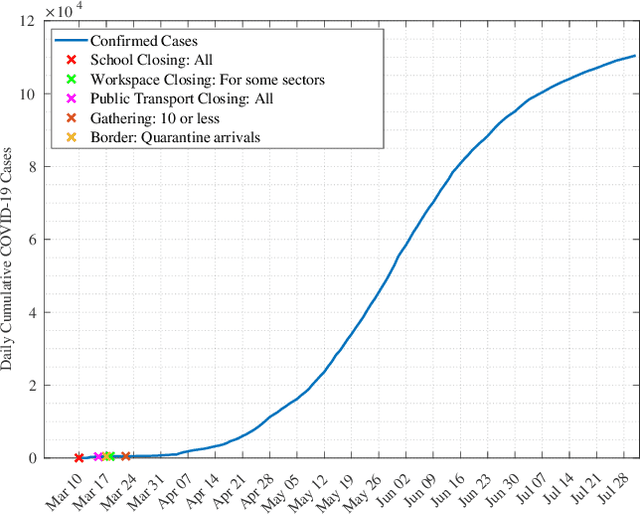
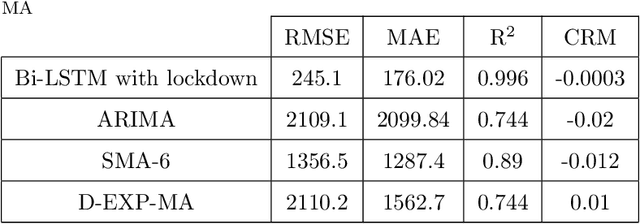
Background: To assist policy makers in taking adequate decisions to stop the spread of COVID-19 pandemic, accurate forecasting of the disease propagation is of paramount importance. Materials and Methods: This paper presents a deep learning approach to forecast the cumulative number of COVID-19 cases using Bidirectional Long Short-Term Memory (Bi-LSTM) network applied to multivariate time series. Unlike other forecasting techniques, our proposed approach first groups the countries having similar demographic and socioeconomic aspects and health sector indicators using K-Means clustering algorithm. The cumulative cases data for each clustered countries enriched with data related to the lockdown measures are fed to the Bidirectional LSTM to train the forecasting model. Results: We validate the effectiveness of the proposed approach by studying the disease outbreak in Qatar. Quantitative evaluation, using multiple evaluation metrics, shows that the proposed technique outperforms state-of-art forecasting approaches. Conclusion: Using data of multiple countries in addition to lockdown measures improve accuracy of the forecast of daily cumulative COVID-19 cases.
A Bayesian Treatment of Real-to-Sim for Deformable Object Manipulation
Dec 09, 2021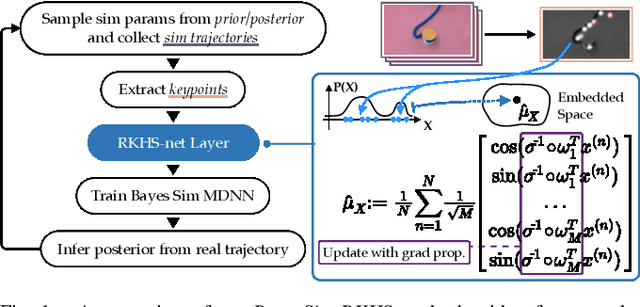
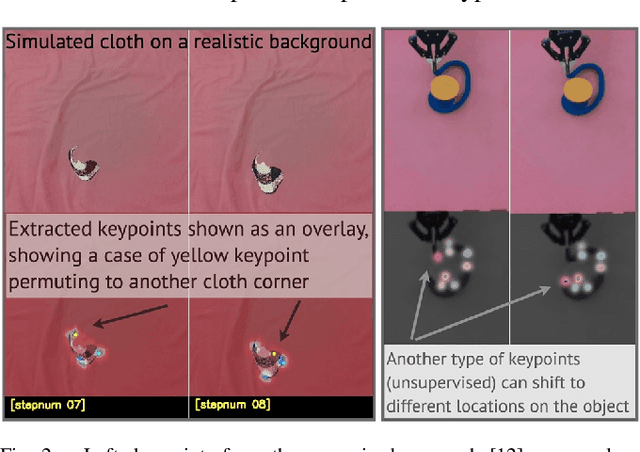
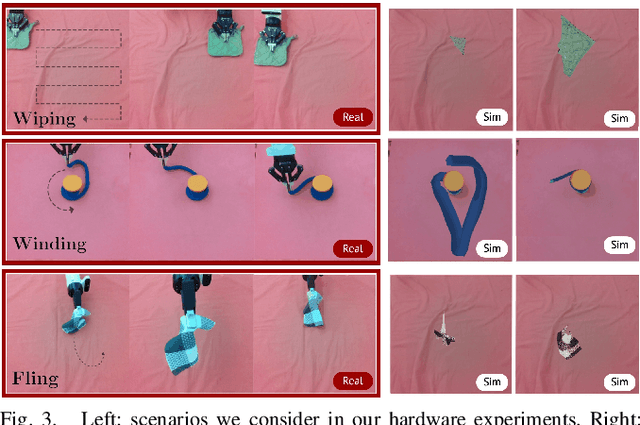
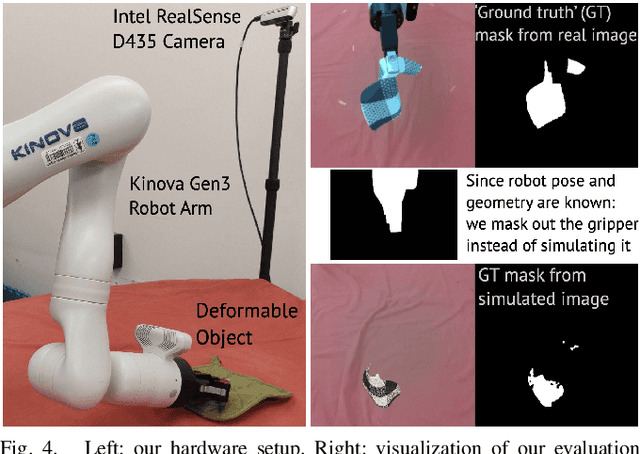
Deformable object manipulation remains a challenging task in robotics research. Conventional techniques for parameter inference and state estimation typically rely on a precise definition of the state space and its dynamics. While this is appropriate for rigid objects and robot states, it is challenging to define the state space of a deformable object and how it evolves in time. In this work, we pose the problem of inferring physical parameters of deformable objects as a probabilistic inference task defined with a simulator. We propose a novel methodology for extracting state information from image sequences via a technique to represent the state of a deformable object as a distribution embedding. This allows to incorporate noisy state observations directly into modern Bayesian simulation-based inference tools in a principled manner. Our experiments confirm that we can estimate posterior distributions of physical properties, such as elasticity, friction and scale of highly deformable objects, such as cloth and ropes. Overall, our method addresses the real-to-sim problem probabilistically and helps to better represent the evolution of the state of deformable objects.
Meta Reinforcement Learning Based Sensor Scanning in 3D Uncertain Environments for Heterogeneous Multi-Robot Systems
Sep 28, 2021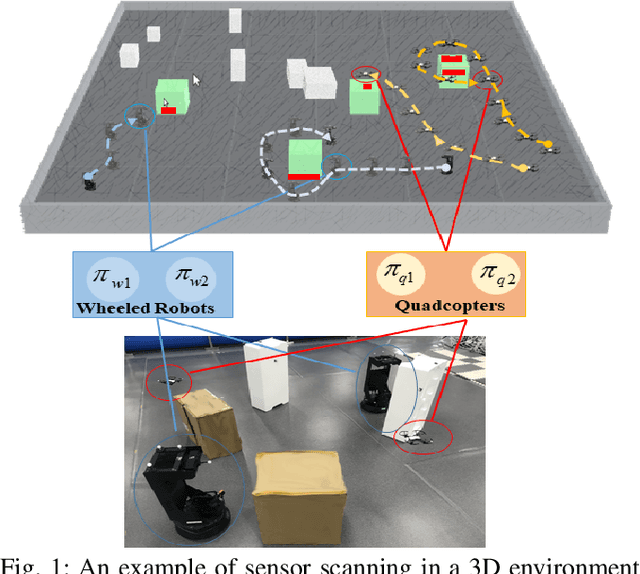
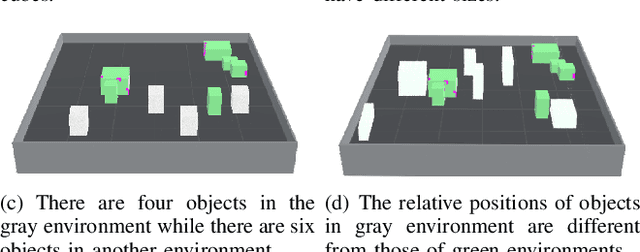
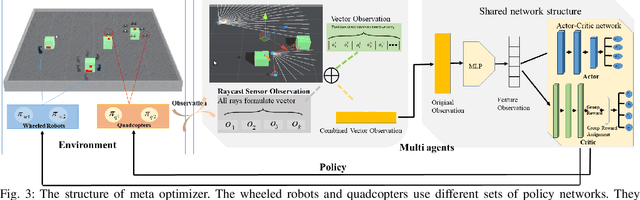
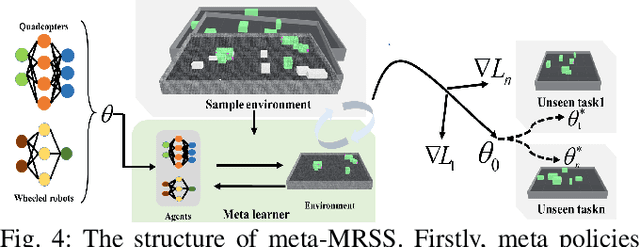
We study a novel problem that tackles learning based sensor scanning in 3D and uncertain environments with heterogeneous multi-robot systems. Our motivation is two-fold: first, 3D environments are complex, the use of heterogeneous multi-robot systems intuitively can facilitate sensor scanning by fully taking advantage of sensors with different capabilities. Second, in uncertain environments (e.g. rescue), time is of great significance. Since the learning process normally takes time to train and adapt to a new environment, we need to find an effective way to explore and adapt quickly. To this end, in this paper, we present a meta-learning approach to improve the exploration and adaptation capabilities. The experimental results demonstrate our method can outperform other methods by approximately 15%-27% on success rate and 70%-75% on adaptation speed.
Chunked Autoregressive GAN for Conditional Waveform Synthesis
Oct 19, 2021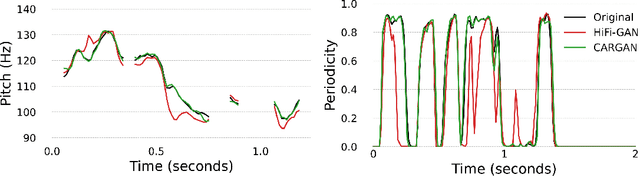

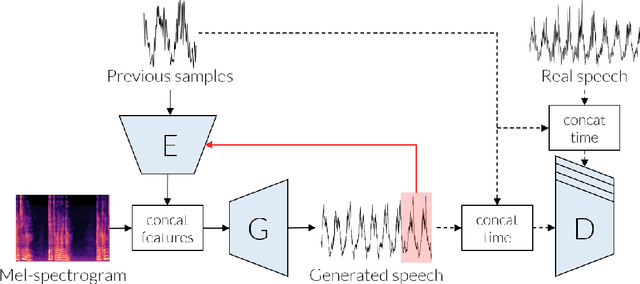
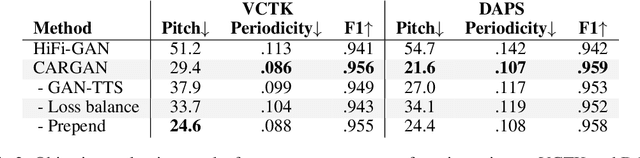
Conditional waveform synthesis models learn a distribution of audio waveforms given conditioning such as text, mel-spectrograms, or MIDI. These systems employ deep generative models that model the waveform via either sequential (autoregressive) or parallel (non-autoregressive) sampling. Generative adversarial networks (GANs) have become a common choice for non-autoregressive waveform synthesis. However, state-of-the-art GAN-based models produce artifacts when performing mel-spectrogram inversion. In this paper, we demonstrate that these artifacts correspond with an inability for the generator to learn accurate pitch and periodicity. We show that simple pitch and periodicity conditioning is insufficient for reducing this error relative to using autoregression. We discuss the inductive bias that autoregression provides for learning the relationship between instantaneous frequency and phase, and show that this inductive bias holds even when autoregressively sampling large chunks of the waveform during each forward pass. Relative to prior state-of- the-art GAN-based models, our proposed model, Chunked Autoregressive GAN (CARGAN) reduces pitch error by 40-60%, reduces training time by 58%, maintains a fast generation speed suitable for real-time or interactive applications, and maintains or improves subjective quality.